Область техники. Изобретение относится к области военной техники, а именно к роботизированному вооружению с дистанционным управлением, которое устанавливается на зооморфное робототехническое средство и может быть использовано для обнаружения и поражения тактическими лазерными комплексами оптико-электронных устройств противника.
Уровень техники. Известна большая группа видов оружия и систем дистанционного поражения противника с использованием военнослужащими переносного, стрелкового оружия (пистолетов, автоматов, пулеметов), гранатометов.
Эти виды вооружений предполагают наличие людей - операторов, которые переносят их на себе и с их помощью поражают живую силу и технику противника с дистанции.
Общеизвестны способы дистанционного поражения противника, заключающиеся в доставке на позиции противника мин, снарядов, бомб и ракет, с использованием минометов, артиллерии, бронетехники, вертолетов, самолетов.
Известен способ дистанционного поражения противника (патент RU 2326328 от 10.06.2008, МПК F41H 13/00), в котором предложено доставлять в район вероятного нахождения противника платформы с находящимся (и закрепленным) внутри роботом, с использованием в качестве устройств поражения противника пулеметы, минометы, пушки, ракеты, лазерные излучатели и излучатели СВЧ, установленные на опорно-поворотном устройстве, а устройство управления роботом выполнено с возможностью наведения оружия на цель и управления ведением огня. Районом вероятного нахождения боевого робота вне платформы является земная поверхность, воздушное и космическое пространство, надводное и подводное пространство. В качестве радиопередающих устройств могут применяться светодиоды, лазерные и СВЧ излучатели.
Известен способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники (патент RU 2746772 от 20.04.2021, МПК F41H 7/00 и H04K 3/00), в котором предлагается применять две наземные дистанционно управляемые мобильные роботизированные платформы, на первую из которых устанавливают многоканальный постановщик помех направленного излучения, а вторую платформу оснащают средством огневого поражения в виде выносного варианта одного из отечественных противотанковых ракетных комплексов. Для повышения живучести дополнительно используют наземную дистанционно управляемую мобильную роботизированную базовую станцию с ретранслятором на борту.
Известен боевой лазерный комплекс и способ повышения его эффективности (патент RU 2473039 С1 от 20.01.2013, МПК F41F 3/04), в котором боевой комплекс наземного лазера содержит боевую машину с боевым лазером в верхней части. Боевая машина выполнена на основе танка, на гусеничном ходу, нижнюю платформу, емкости окислителя и горючего.
Мобильный боевой лазерный комплекс (патент RU 2496078 С2 от 20.10.2013, МПК F41F 3/04 и H01S 3/00) содержит боевую машину с лазером. Боевая машина выполнена на гусеничном ходу. На средней поворотной платформе установлен боевой лазер, содержащий жидкостной ракетный двигатель и резонаторы, выполненные перпендикулярно его продольной оси.
Боевой модуль с дистанционным управлением (патент RU 2629688 С1 от 31.08.2017, МПК F41H 13/00 и F41A 23/34) содержит: опорно-поворотное устройство (ОПУ), установленное на крыше транспортного средства; компьютер; пульт управления. ОПУ содержит вращающееся контактное устройство (ВКУ) с оптическим и электрическим переходами, прицельный комплекс, автоматическое оружие с автоспуском, систему пусковых установок, формирователь темпа стрельбы и длины пулеметной очереди, систему стабилизации оружия с блоком управления, приводами горизонтальной и вертикальной наводки.
Перечисленные аналоги, как правило, используют традиционное вооружение и средства его доставки в район боевых действий, а также ТЛК на крупногабаритной технике, обладающие соответствующими известными достоинствами и недостатками из которых можно отметить большую грузоподъемность и большую заметность, в том числе тепловую и электромагнитную.
Робот-собака, обладая меньшей грузоподъемностью, в свою очередь, обладает минимальным силуэтом и малой заметностью по сравнению с перечисленными аналогами, может перемещаться в районе боевых действий самостоятельно по заранее заложенному маршруту перемещения или по командам оператора, с переменной скоростью, с остановками и без остановок. При этом управление тактическим лазерным комплексом и роботом-собакой может осуществляться дистанционно оператором боевого расчета, находящимся в укрытии.
Таким образом, роботы-собаки использовались для размещения на них стрелкового вооружения, что, в общем, дает мало преимуществ по сравнению с обычными бойцами, за исключением несколько большей безопасности для операторов за счет дистанционного управления роботом-собакой.
Однако, одним из наиболее эффективных способов поражения противника считается подавление тактическим лазерным комплексом оптико-электронных приборов, наблюдателей, снайперов, наводчиков и бронетехники противника. Как показывают расчеты (свидетельство о государственной регистрации программы для ЭВМ RU 2021665221 от 15.09.2021, RU 2021666020 от 06.10.2021) потери противника при применении ТЛК увеличиваются на 15-30%, потери своих войск уменьшаются на 5-15%. При этом, как правило, применяются в качестве силовых лазеров зеленые лазеры (длина волны λ=0,53 мкм) с большой заметностью (до 5-10 км).
Задачей заявляемого изобретения является снижение боевого потенциала противника, повышение безопасности и живучести тактических лазерных комплексов с силовыми зелеными (и другими) лазерами, их операторов, за счет ухода от стационарного их размещения в районе расположения войск - на зооморфные робототехнические средства - робота-собаку. Мобильное ТЛК покрывают маскирующим покрытием на устройствах, излучающих тепловое и электромагнитное излучение.
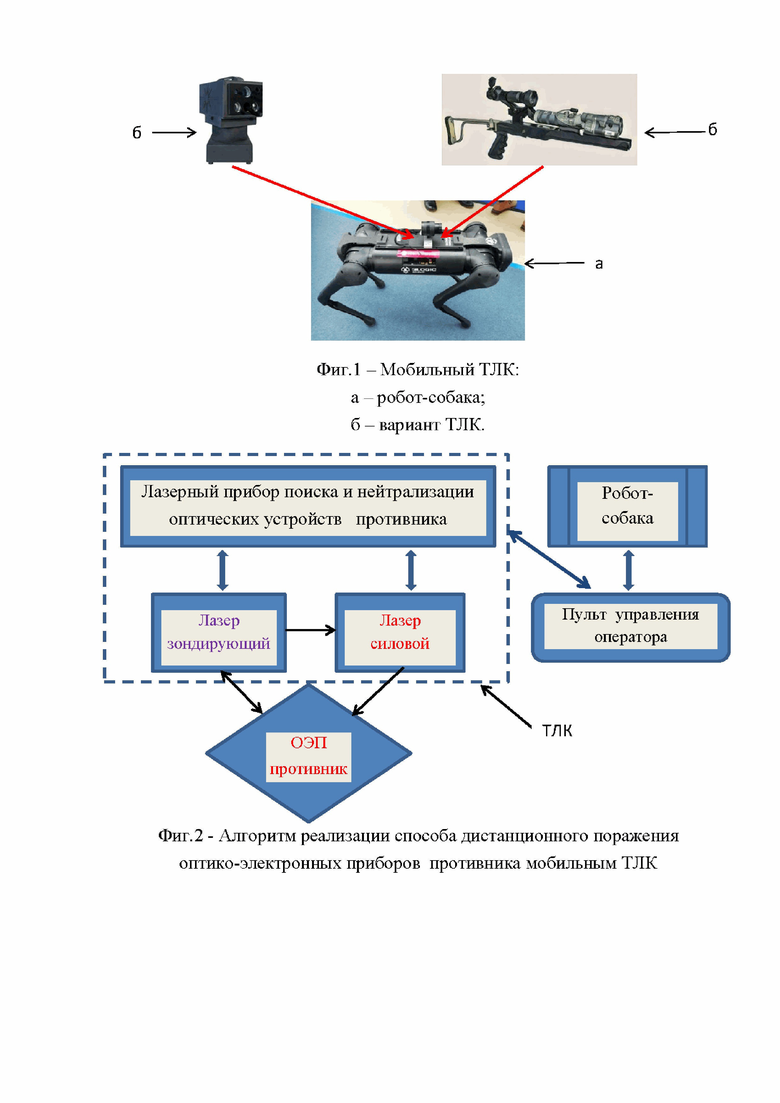
Сущность изобретения. На роботе-собаке устанавливается тактический автоматизированный лазерный комплекс с зондирующими, силовыми и другими лазерами (см. фиг. 1), управление и контроль которыми осуществляется дистанционно оператором боевого расчета, находящимся в укрытии. Робот-собака в район боевого применения перемещается самостоятельно по заранее заложенному маршруту перемещения или по командам оператора, а во время боевого применения передвигается с переменной скоростью, с остановками и без остановок. ТЛК и приборы с зондирующими и силовыми лазерами могут располагаться как вдоль продольной оси робота-собаки, так и поперек продольной оси с возможностью их работы, как во время перемещения робота-собаки, так и во время кратковременных его остановок и разворота «лицом» к противнику. На фиг. 2 показан алгоритм реализации способа дистанционного поражения оптико-электронных приборов противника с помощью мобильного ТЛК.
На фиг. 1 - показан мобильный ТЛК, устанавливаемый на роботе-собаке и дистанционно поражающий ОЭП противника:
а - робот-собака;
б - вариант ТЛК, который устанавливается на роботе-собаке.
На фиг. 2 - показан алгоритм реализации способа дистанционного поражения оптико-электронных приборов противника мобильным ТЛК.
В лазерных комплексах, располагающихся на роботе-собаке, используются силовые лазеры зеленого спектра с длиной волны (λ) ~ 0,53 мкм и (или) инфракрасные с λ ~ 1,06 мкм, синего спектра с длиной волны ~ 0,45 мкм, зондирующие лазеры с λ ~ 0,86 мкм или другие лазеры с длиной волны в диапазоне от 0,3 до 20 мкм, при этом зеленые демаскирующие силовые лазеры могут быть заменены на лазеры с меньшей заметностью, например, на синие, белые, инфракрасные или другие, но с такой же или большей эффективностью поражения оптико-электронных приборов противника: например, на квазенепрерывные лазеры или лазеры с короткими и ультракороткими импульсами. Зондирующие, силовые и другие лазеры могут включаться в движении или во время кратковременных остановок только на десятки секунд, до нескольких минут, после чего меняется позиция ТЛК/робота на десятки метров с возможностью его безопасного размещения, в т.ч. в укрытии.
Предлагаемые сегодня роботы-собаки с необходимыми ТТХ, датчиками и системой управления - могут передвигаться по пересеченной местности с переменной скоростью до 7 км/час, с полезной нагрузкой весом до 10-40 кг.
Компания Boston Dynamics в 2016 году впервые представила робота-собаку Spot, универсального помощника, который может выполнять рутинную работу в любой сфере - от военных задач, строительства и горного дела до здравоохранения. Робот может передвигаться по местности со сложным ландшафтом - по камням и зарослям; подниматься по лестницам и склонам; обходить препятствия; ориентироваться на местности и следовать по маршрутам, которые задает пользователь через удаленный контроллер; функционировать до 90 минут без подзарядки аккумулятора; перемещать грузы весом до 14 кг; двигаться со скоростью 1,6 м/с (как человек, который идет быстрым шагом) (https://trends. rbc.ru/trends/industry/611b6ace9a79471db2eb6560 17.08.2021).
Одновременно с презентацией американской робота-собаки прошло сообщение (https://rg.ru/2022/01/12/na-chto-pohozhi-voennye-roboty-ssha-i-rossii.html 15.01.2022) о том, что в России на охрану космодрома
"Восточный" заступила робототехническая платформа "Маркер". Она была разработана компанией "Андроидная техника" в содружестве с Фондом перспективных исследований. "Маркер" может быть вооружен различными боевыми комплексами, включая управляемые ракеты, и оптико-электронными и радиотехническими наблюдательными системами. Кроме того, он оснащается малогабаритным беспилотником. Отмечается, что "Маркер" может работать как в автономном режиме, так и под управлением оператора.
Робот-собака доставляет по командам оператора с пульта управления (или перемещается самостоятельно по заранее подготовленной программе) ТЛК в район боевого применения. После чего оператор включает зондирующий лазер в режим поиска бликующих оптико-электронных приборов противника. При их обнаружении включаются силовые лазеры для подавления ОЭП. Оператор узнает о факте поражения ОЭП по соответствующему обратному, отраженному сигналу, доставляемому в зондирующий лазер (см. фиг. 2). Постоянная смена местоположения ТЛК, после каждого обнаружения и поражения ОЭП противника, снижает вероятность обнаружения ТЛК противником, а оператор роботизированного комплекса становится неуязвимым.
Техническим результатом изобретения является снижение боевого потенциала противника за счет поражения ОЭП мобильными ТЛК, повышения живучести мобильных ТЛК, а также безопасности операторов.
Промышленная применимость
Изобретение предназначено для применения в Сухопутных войсках во всех видах боя, на всех театрах военных действий, на сильно пересеченной, горной и лесистой местности.

Источники информации
1. BigDog //URL: https://ru.wikipedia.org/wiki/BigDog (дата обращения 25.05.2022).
2. Вагапова Д. Зачем SpaceX и другие компании купили робота-собаку Spot//URL: https://trends.rbc.ru/trends/industry/611b6ace9a79471db2eb6560 (дата обращения 17.08.2021).
3. На что похожи военные роботы США и России // URL: https://rg.ru/2022/01/12/na-chto-pohozhi-voennye-roboty-ssha-i-rossii.html (дата обращения 15.01.2022).
4. Рябов Кирилл. Проект SPUR: робот-собака становится снайпером // URL: https://topwar.ru/188038-proekt-spur-robot-sobaka-stanovitsja-snajperom.html (дата обращения 14.10.2021).
5. Dogs and other walkers Собаки и другие ходоки / Military+Aerospace Electronics March 2022.- P. 22-23 // URL: www.militaryaerospace.com.
6. Собака-робот для военного применения // URL: https://oberon-alpha.ru/blog/weapons/robot_dog (дата обращения 18.11.2020).
7. Продвинутый лазерный комплекс для борьбы со снайперами представили в РФ / ЛазерИнформ №17-18 (680-681), сентябрь 2020. - С10 // URL: https://nation-news.ru/553065-prodvinutyi-lazernyikompleks-dlya-borby-so-snaiperami-predstavili-v-rf.
8. Научно-практическая конференция «Информационно-управленческие технологии и системы фотоники» // ЛазерИнформ, 2021, №9 (696).- С. 12-13.
9. Сысуев С.Ю., Спивак И.А., Игнатов А.Г. Носимые тактические лазерные комплексы // Армейский сборник, 2022, №1. - С. 195-202.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ УЛЬТРАФИОЛЕТОВАЯ СОЛНЕЧНО-СЛЕПАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА АВТОМАТИЧЕСКОЙ РАЗВЕДКИ ЦЕЛЕЙ ДЛЯ БРОНЕТАНКОВОЙ ТЕХНИКИ | 2022 |
|
RU2820064C2 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| Система управления многофункционального робототехнического комплекса обеспечения боевых действий | 2016 |
|
RU2652329C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС | 2013 |
|
RU2538473C2 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| БОЕВОЙ РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2015 |
|
RU2584766C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ЦЕЛИ ДЛЯ ОБЕСПЕЧЕНИЯ ПРИМЕНЕНИЯ ТАКТИЧЕСКИХ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИКО-ЭЛЕКТРОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2021 |
|
RU2776005C1 |
Изобретение относится к области военной техники и касается роботизированного вооружения с дистанционным управлением. Во время дистанционного поражения оптико-электронных приборов противника (ОЭП) в районе их вероятного нахождения с помощью мобильного тактического лазерного комплекса (ТЛК), размещенного на роботизированном средстве перемещения по пересеченной местности в районе боевых действий, используют зооморфное робототехническое средство робота-собаку. На роботе-собаке устанавливают тактический лазерный автоматизированный комплекс, управление и контроль которыми осуществляют дистанционно оператором боевого расчета, находящимся в укрытии. Достигается снижение боевого потенциала противника, повышение живучести мобильных ТЛК и безопасности операторов. 4 з.п. ф-лы, 2 ил.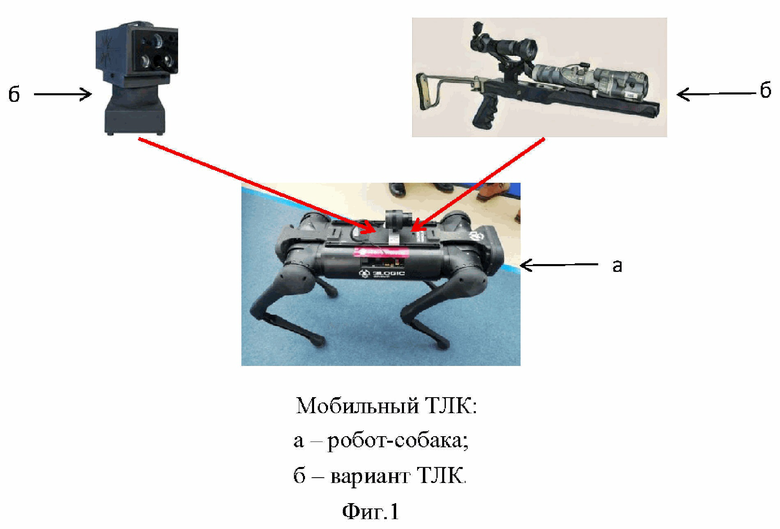
1. Способ дистанционного поражения оптико-электронных приборов противника (ОЭП) в районе их вероятного нахождения с помощью мобильного тактического лазерного комплекса (ТЛК), размещенного на роботизированном средстве перемещения по пересеченной местности в районе боевых действий, отличающийся тем, что в качестве средства передвижения используют зооморфное робототехническое средство робота-собаку, на котором устанавливают тактический лазерный автоматизированный комплекс, причем для поражения ОЭП противника используют силовые лазеры зеленого спектра с длиной волны (λ) ~ 0,53 мкм и (или) инфракрасные с λ ~ 1,06 мкм, синего спектра с длиной волны ~ 0,45 мкм, а зондирующие лазеры с λ ~ 0,86 мкм, или лазеры с длиной волны в диапазоне от 0,3 до 20 мкм, управление и контроль которыми осуществляют дистанционно оператором боевого расчета, находящимся в укрытии.
2. Способ дистанционного поражения ОЭП противника по п.1, отличающийся тем, что зооморфное робототехническое средство робот-собака выполнено с возможностью самостоятельного перемещения в район боевого применения по заранее заложенному маршруту перемещения или по командам оператора.
3. Способ дистанционного поражения ОЭП противника по п.1, отличающийся тем, что зооморфное робототехническое средство робот-собака выполнено с возможностью передвижения с переменной скоростью, с остановками и без остановок.
4. Способ дистанционного поражения ОЭП противника по п.1, отличающийся тем, что зооморфное робототехническое средство робот-собака имеет маскирующее покрытие на устройствах, излучающих тепловое и электромагнитное излучение.
5. Способ дистанционного поражения ОЭП противника по п.1, отличающийся тем, что зондирующие и силовые лазеры включают как во время движения, так и во время кратковременных остановок от десятка секунд до нескольких минут, после чего меняют позицию зооморфного робототехнического средства робота-собаки на десятки метров.
| CN 216577891 U, 24.05.2022 | |||
| CN 104890759 B, 16.06.2017 | |||
| ШАГАЮЩАЯ МАШИНА И СПОСОБ ЕЕ ШАГАНИЯ | 2009 |
|
RU2403166C1 |
| СПОСОБ СОЗДАНИЯ АКТИВНЫХ ПОМЕХ ЛАЗЕРНЫМ СРЕДСТВАМ ДАЛЬНОМЕТРИРОВАНИЯ | 2000 |
|
RU2186409C2 |
| Способ ковки, штамповки длинных изделий и калибровки прутков | 1948 |
|
SU91421A2 |

