Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока и может быть использовано для регулирования момента, скорости и углового перемещения рабочих органов машин и механизмов, в том числе для глубинных погружных электронасосов при добыче нефти, в подводных аппаратах, в атомных реакторах, в электромобилях, электрошпинделях станков и специальных роботах, в бортовой автоматике и специальных следящих системах.
Цель изобретения - повышение устойчивости, диапазона и точности регулирования момента и скорости электродвигателя без датчиков, конструктивно связанных с электродвигателем.
Известен способ векторного управления электродвигателем, при котором питают электродвигатель m-фазным током и от m-фазного инвертора, измеряют действительные фазные токи, регулируют фазу, частоту и амплитуду фазных токов путем переключения силовых ключей m-фазного инвертора, в зависимости от рассогласования заданных и измеренных токов, при этом заданные фазные токи формируют в виде двух ортогональных составляющих вектора тока относительно сигнала развертки, характеризующего заданную фазу синхронизации, а фазы фазных токов сдвигают относительно фазы синхронизации на угол, пропорциональный отношению указанных ортогональных составляющих вектора тока [1].
Электропривод для осуществления этого способа содержит последовательно соединенные m-фазный инвертор, m-фазный датчик тока и m-фазный электродвигатель, при этом управляющие входы m-фазного инвертора через устройства управления ключами, m-фазного широтно-импульсного модулятора и m-фазного регулятора тока подключены к выходам преобразователя декартовых координат [1].
Недостатками этого технического решения являются неустойчивость движения ротора, малый диапазон и низкая точность регулирования момента и скорости электродвигателя без датчика, конструктивно связанного с электродвигателем, что вызвано неопределенностью ориентации координат вектора тока и несоответствие фазы синхронизации временного вектора тока, задаваемой на входе преобразователя декартовых координат, начальному и текущему углу пространственного вектора потокосцепления ротора электродвигателя относительно неподвижной геометрической оси статора.
Наиболее близким к предлагаемому является способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе [2], согласно которому питают статорные обмотки электродвигателя фазными токами, равными разности двух раздельно регулируемых периодических токов статора - косинусоидального (синфазного) и синусоидального (ортофазного) токов статора, изменяемых в функции фазы синхронизации ϕs, характеризующей пространственный угол текущего углового положения продольной магнитной оси постоянных магнитов на роторе, относительно оси α статора, для чего измеряют двухфазный ток статора isα,isβ, по величинам которого в зависимости от синусной и косинусной функций фазы синхронизации ϕs вычисляют измеренные величины амплитуд ортофазного и синфазного токов статора, в зависимости от которых амплитуду ортофазного тока регулируют пропорционально заданной величине момента электродвигателя, а амплитуду синфазного тока регулируют на нулевом уровне в основной зоне регулирования скорости до граничной скорости и увеличивают с ростом скорости выше граничной скорости [2].
Электропривод для осуществления способа векторного управления синхронным электродвигателем с постоянными магнитами на роторе, содержит инвертор, через датчик фазного тока, подключенный к статорным обмоткам синхронного электродвигателя с постоянными магнитами на роторе, управляющие входы инвертора через блок формирования импульсов и блок ШИМ-регуляторов фазных токов подключен к выходам прямого преобразователя двухфазно-трехфазных координат, входы которого соединены с выходами прямого преобразователя декартовых координат, подключенного двумя первыми входами к выходам регуляторов ортофазного и синфазного токов, входы обратных связей которых соединены с выходами обратного преобразователя декартовых координат, двумя первыми входами подключенного через обратный преобразователь двухфазно-трехфазных координат к датчикам фазного тока, выходы которых подключены также ко входам блока ШИМ-регуляторов фазных токов, два других входа прямого и обратного преобразователей декартовых координат соответственно объединены и образуют синусный и косинусный входы преобразователей декартовых координат, при этом управляющие входы регуляторов синфазного и ортофазного токов подключены через блок управления вектором тока к выходу регулятора скорости [2].
Недостатком этого технического решения являются неустойчивость движения ротора, малый диапазон и низкая точность регулирования момента и скорости электродвигателя без датчиков, конструктивно связанных с электродвигателем, что вызвано применением способа ориентации декартовых координат регулирования тока по угловой ориентации нулевых меток и сигналов датчиков на статоре и роторе электродвигателя.
Указанный недостаток существенно снижает эффективность и ограничивает область применения синхронных электродвигателей с постоянными магнитами на роторе, так как в химически активных, жидкостных радиоактивных средах и в мобильных агрегатах часто оказывается невозможным или малоэффективным применение датчиков, конструктивно связанных с электродвигателем, в том числе в глубинных погружных электронасосах для добычи нефти, в подводных аппаратах, в атомных реакторах, в электромобилях, электрошпинделях станков и специальных роботах, в бортовой автоматике и специальных следящих системах. Исключение датчика углового положения ротора из состава электропривода в таких машинах и механизмах приводит к неуправляемости взаимной ориентацией векторов тока и магнитного потока, выпадению из синхронизма, остановам электродвигателя, колебаниям момента и скорости и снижению диапазона регулирования, особенно при широких изменениях нагрузки.
Целью изобретения является исключение этого недостатка, а именно, повышение устойчивости, диапазона и точности регулирования момента и скорости электродвигателя без датчиков, конструктивно связанных с электродвигателем.
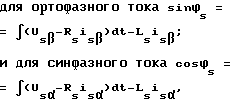
Для этого в способе векторного управления синхронным электродвигателем с постоянными магнитами на роторе, согласно которому питают статорные обмотки электродвигателя фазными токами, равными разности двух раздельно регулируемых периодических токов статора - косинусоидального (синфазного) и синусоидального (ортофазного) токов статора, изменяемых в функции фазы синхронизации ϕs характеризующей пространственный угол текущего углового положения продольной магнитной оси постоянных магнитов на роторе относительно оси α статора, для чего измеряют двухфазный ток статора isα,isβ, по величинам которого в зависимости от синусной и косинусной функций фазы синхронизации ϕs вычисляют измеренные величины амплитуд ортофазного и синфазного токов статора, в зависимости от которых амплитуду ортофазного тока регулируют пропорционально заданной величине момента электродвигателя, а амплитуду синфазного тока регулируют на нулевом уровне в основной зоне регулирования скорости граничной скорости и увеличивают с ростом скорости выше граничной скорости, дополнительно регулируют фазу тока статора, равную фазе синхронизации ϕs, в зависимости от величины напряжения статора, для чего измеряют двухфазное напряжение статора usα,usβ,usβ затем по измеренным величинам двухфазного напряжения статора usα,usβ,usβ и двухфазного тока статора isα,isβ изменяют фазу ортофазного тока статора по закону
sinϕs= ∫(usβ-Rsisβ)dt-Lsisβ,
а фазу синфазного тока статора изменяют по закону
cosϕs= ∫(usα-Rsisα)dt-Lsisα,
где Rs - активное сопротивление фазной обмотки статора, Ls - индуктивность статора электродвигателя, причем текущую величину скорости ротора вычисляют по измеренным величинам двухфазного напряжения статора и двухфазного тока статора в виде производной фазы синхронизации ϕs и регулируют скорость ротора в зависимости от вычисленной текущей величины скорости путем изменения заданной величины момента электродвигателя пропорционально рассогласованию вычисленной текущей величины скорости с заданной величиной скорости, которая может изменяться в зависимости от рассогласования величины пропорциональной фазе синхронизации и заданной величины углового положения ротора.
В электроприводе для осуществления способа векторного управления, содержащем инвертор, через датчики фазного тока подключенный к статорным обмоткам синхронного электродвигателя с постоянными магнитами на роторе, управляющие входы инвертора через блок формирования импульсов и блок ШИМ-регуляторов фазных токов подключен к выходам прямого преобразователя двухфазно-трехфазных координат, входы которого соединены с выходами прямого преобразователя декартовых координат, подключенного двумя первыми входами к выходам регуляторов ортофазного и синфазного токов, входы обратных связей которых соединены с выходами обратного преобразователя декартовых координат, двумя первыми входами подключенного через обратный преобразователь двухфазно-трехфазных координат к датчикам фазного тока, выходы которых подключены также ко входам блока ШИМ-регуляторов фазных токов, два других входа прямого и обратного преобразователей декартовых координат соответственно объединены и образуют синусный и косинусный входы преобразователей декартовых координат, при этом управляющие входы регуляторов синфазного и ортофазного токов подключены через блок управления вектором тока к выходу регулятора скорости, дополнительно на выходах инвертора подключен датчик двухфазного напряжения, два выхода которого соединены через первую пару сумматоров со входами двух интеграторов, выходы которых через вторую пару сумматоров соединены с косинусным и синусным входами преобразователей декартовых координат, вторые входы каждой из двух пар сумматоров подключены к выходам обратного преобразователя двухфазно-трехфазных координат, а синусный и косинусный входы прямого и обратного преобразователей декартовых координат соединены с двумя входами блока вычисления угла и скорости, выход канала вычисления скорости которого подключен ко входу обратной связи регулятора скорости.
Кроме того, в электропривод дополнительно введен регулятор положения, вход обратной связи которого подключен к выходу канала вычисления угла блока вычисления угла и скорости, а управляющий вход образует вход задания углового положения ротора, при этом выход регулятора положения соединен с управляющим входом регулятора скорости.
Дополнительно, в электроприводе блок вычисления угла и скорости содержит на двух входах узел деления, выход которого подключен через узел вычисления арктангенсной функции к узлу вычисления знака, кроме того, вычислитель угла, выходом подключенный через узел вычисления производной к узлу умножения, второй вход которого соединен с выходом узла вычисления знака, причем выход узла умножения образует выход канала вычисления скорости, выход канала вычисления угла образован выходом вычислителя углового положения ротора, первый вход которого соединен с выходом вычислителя угла, а второй вход подключен к выходу узла вычисления знака.
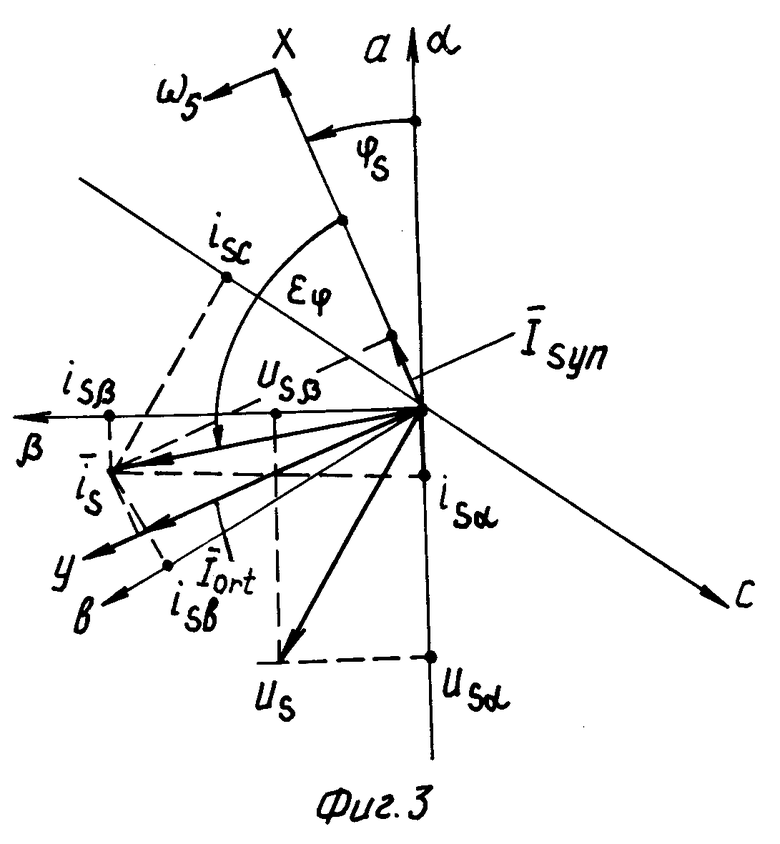
На фиг. 1 представлена функциональная схема электропривода с синхронным электродвигателем, на фиг 2 - диаграмма пространственных векторов состояния электродвигателя, на фиг. 3 - диаграмма временных векторов, поясняющие способ векторного управления.
Электропривод с синхронным электродвигателем с постоянными магнитами на роторе (фиг. 1) содержит на силовом входе источник питания 1, выполненный в виде выпрямителя 1-а или аккумуляторной батареи 1-б. Выходы источника питания 1 через конденсатор 2 соединены с силовыми входами инвертора 3.
Выходы a, b, c инвертора 3 через датчики 4, 5 фазного тока подключены к статорным обмоткам синхронного электродвигателя 6 с постоянными магнитами 7 на роторе. Управляющие входы инвертора 3 соединены с выходами блока 8 формирования импульсов, входы которого соединены с выходами блока 9 ШИМ-регуляторов тока. Входы блока 9 ШИМ-регуляторов тока подключены к выходам isa *, isb *, isc * прямого преобразователя 10 двухфазно-трехфазных координат, входы которого соединены с выходами i
Два других входа прямого и обратного преобразователей 11, 14 декартовых координат соответственно объединены и образуют синусный и косинусный входы sin, cos преобразователей 11, 14 декартовых координат.
Управляющие входы Iort *, Isyn * регуляторов 12, 13 синфазного и ортофазного токов подключены через блок 15 управления вектором тока к выходу регулятора 16 скорости.
Электропривод содержит датчик 20 двухфазного напряжения usα,usβ, подключенный на выходах инвертора 3. Датчик 20 двухфазного напряжения содержит на входе резисторы 21, 22, 23, включенные по схеме, соответствующей схеме соединения фазных обмоток статора синхронного электродвигателя 6, например по схеме "звезда", изображенной на фиг. 1. Выходы двух резисторов 21, 22 подключены ко входам элементов гальванической развязки 24, 25, выходы которых подключены ко входам сумматора 26. Выход первого элемента 24 гальванической развязки, который подключен к резистору 21 фазы "a" инвертора 3, образует первый выход usα датчика 20 двухфазного напряжения. Выход сумматора 26 образует второй выход usβ датчика 20 двухфазного напряжения.
Два выхода usα,usβ датчика 20 двухфазного напряжения соединены через первую пару сумматоров 27, 28 со входами двух интеграторов 29, 30, выходы которых через вторую пару сумматоров соединены с косинусным и синусным входами cosϕs,sinϕs преобразователей 11, 14 декартовых координат. Вторые входы каждой из пар сумматоров 27, 28 и 31, 32 соединены с выходами обратного преобразователя 17 двухфазно-трехфазных координат. Синусный и косинусный входы прямого и обратного преобразователей 11, 14 декартовых координат соединены с двумя входами блока 33 вычисления угла и скорости, содержащего выход канала вычисления скорости ω и выход канала вычисления угла θ. Выход канала вычисления скорости ω подключен ко входу обратной связи регулятора 16 скорости.
Блок 33 вычисления угла и скорости содержит на двух входах cosϕs,sinϕs узел 34 деления, выход которого подключен через узел 35 вычисления арктангенсной функции к узлу 36 вычисления знака. Кроме того, блок 33 вычисления угла и скорости содержит вычислитель 37 угла, выходом  подключенный ко входу узла 38 вычисления производной, выход которого соединен со входом узла 39 умножения. Выход вычислителя 37 угла может быть подключен ко входу вычислителя 40 углового положения ротора, второй вход которого соединен с выходом узла 36 вычисления знака. Выход узла 36 вычислителя знака подключен ко второму входу узла 39 умножения.
подключенный ко входу узла 38 вычисления производной, выход которого соединен со входом узла 39 умножения. Выход вычислителя 37 угла может быть подключен ко входу вычислителя 40 углового положения ротора, второй вход которого соединен с выходом узла 36 вычисления знака. Выход узла 36 вычислителя знака подключен ко второму входу узла 39 умножения.
Выход узла 39 умножения образует выход канала вычисления скорости ω блока 33, а выход вычислителя 40 углового положения ротора образует выход канала вычисления угла θ блока 33 вычисления угла и скорости.
Электропривод может содержать на входе регулятор 41 положения, выход которого подключен к управляющему входу регулятора 16 скорости.
Источник 1 питания может быть выполнен в виде трехфазного диодного выпрямителя, подключаемого к промышленной сети в варианте 1-a, или, в случае применения для автономных, мобильных и бортовых машин и механизмов, в виде аккумуляторной батареи в варианте 1-b. Инвертор 3 может быть выполнен в виде трехфазного транзисторного инвертора, либо в виде твердотельного IGBT - модуля с шестью ключами на биполярных транзисторах с изолированным затвором (БТИЗ), как показано на фиг. 1.
Блок 8 формирования импульсов может быть выполнен в виде специальной интегральной схемы шестиканального драйвера, а совокупность блоков 9 ШИМ-регуляторов фазного тока, преобразователей 10, 11, 14, 17 координат может быть выполнена в виде сигнального микропроцессора, в который могут быть встроены аналого-цифровые преобразователи сигналов датчиков 4, 5 тока и датчика 20 двухфазного напряжения.
Устройство блока 15 управления вектором тока выполнено в соответствии с [2].
Блок 33 и регуляторы 12, 13, 16, 41 могут быть выполнены в микропроцессорном исполнении, например на цифровом сигнальном процессоре.
Электропривод работает следующим образом.
С выхода источника 1 питания сглаженное конденсатором 1 постоянное напряжение через транзисторные ключи инвертора 3 и датчики 4, 5 фазного тока подается на статорные обмотки синхронного электродвигателя 6 с постоянными магнитами на роторе 7. Выходные импульсы блока 8 формирования импульсов управляют открытым и закрытым состоянием шести транзисторных ключей инвертора 3 по способу широтно-импульсной модуляции сигналов рассогласования между заданными фазными токами isa *, isb *, isc * и измененными фазными токами isa. isb, isc с помощью блока 9 ШИМ-регуляторов фазных токов.
На выходах прямого преобразователя 10 двухфазно-трехфазных координат формируется трехфазная система заданных фазных токов в зависимости от входной двухфазной системы заданных токов i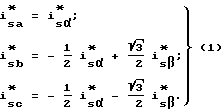
Двухфазная система заданных фазных токов i из вращающихся декартовых координат d, g приводится к неподвижным декартовым координатам α,β (фиг. 2). Угловая скорость вращения декартовых координат и угол θ вращающейся продольной оси d относительно неподвижной оси α статора электродвигателя 6 (фиг. 2) задаются сигналами cos, sin на входах прямого преобразователя 11 декартовых координат (фиг. 1), на два других входа которого поступают сигналы задания проекций isd *, isg * заданного вектора тока статора в координатах d, g согласно выражениям:
из вращающихся декартовых координат d, g приводится к неподвижным декартовым координатам α,β (фиг. 2). Угловая скорость вращения декартовых координат и угол θ вращающейся продольной оси d относительно неподвижной оси α статора электродвигателя 6 (фиг. 2) задаются сигналами cos, sin на входах прямого преобразователя 11 декартовых координат (фиг. 1), на два других входа которого поступают сигналы задания проекций isd *, isg * заданного вектора тока статора в координатах d, g согласно выражениям: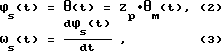
где ϕs - фаза синхронизации, характеризующая временной процесс управления вектором тока  синхронно с изменением временных декартовых координат x, y (фиг. 3);
синхронно с изменением временных декартовых координат x, y (фиг. 3);
θ(t) - пространственный угол продольной оси d относительно пространственной неподвижной оси α (фиг. 2);
Zp - число пар полюсов электродвигателя;
θм(t) - угол положения ротора электродвигателя.
В прямом преобразователе 11 декартовых координат производится вычисление величин двухфазного тока i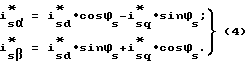
Синхронизация процесса управления вектором тока  во времени t (фиг. 3) с процессом пространственного углового перемещения пространственных векторов (фиг. 2) производится с помощью замкнутых контуров регулирования синфазного и ортофазного токов
во времени t (фиг. 3) с процессом пространственного углового перемещения пространственных векторов (фиг. 2) производится с помощью замкнутых контуров регулирования синфазного и ортофазного токов  образованных регуляторами 12, 13 ортофазного и синфазного токов, обратного преобразователя 14 декартовых координат, блока 15 управления вектором тока и регулятора 16 скорости и обратного преобразователя 17 двухфазно-трехфазных координат с сумматором 18.
образованных регуляторами 12, 13 ортофазного и синфазного токов, обратного преобразователя 14 декартовых координат, блока 15 управления вектором тока и регулятора 16 скорости и обратного преобразователя 17 двухфазно-трехфазных координат с сумматором 18.
С помощью регуляторов 12, 13 ортофазного и синфазного токов регулируются по пропорционально-интегральному закону амплитуды ортофазного тока Iort и синфазного тока Isyn в зависимости от рассогласований ΔIort и ΔIsyn в соответствии с уравнениями:
где T1, T2 - постоянные времени,
p - оператор,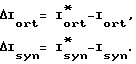
Измеренные величины амплитуд Iort, Isyn ортофазного и синфазного токов, образуются на двух выходах обратного преобразователя 14 декартовых координат в соответствии с уравнениями обратного преобразования декартовых координат из неподвижной декартовой системы α,β во вращающуюся декартовую систему x, y:
На входы обратного преобразователя 14 декартовых координат поступают сигналы измеренного двухфазного тока isα,isβ, преобразованного с помощью обратного преобразователя 17 двухфазно-трехфазных координат и сумматора 18 согласно формулам
Измеренные амплитуды Iort, Isyn в виде выходных сигналов обратного преобразователя 14 декартовых координат сравниваются на входах регуляторов 13, 14 с заданными амплитудами Iort *, Isyn *, которые вычисляются в блоке 15 управления вектором тока статора, предложенном в прототипе [2]. На два входа блока 15 управления вектором тока статора подаются сигналы, пропорциональные заданному моменту M* и граничной скорости ωгр, который ограничивает диапазон регулирования скорости в режиме нулевого синфазного тока Isyn *=Isyn = 0. В этой основной зоне регулирования скорости угол εd пространственного вектора тока статора  (фиг. 2) относительно продольной оси d постоянных магнитов составляет 90o, а амплитуда ортофазного тока Iort *=Iort пропорциональна заданному моменту M*.
(фиг. 2) относительно продольной оси d постоянных магнитов составляет 90o, а амплитуда ортофазного тока Iort *=Iort пропорциональна заданному моменту M*.
При возрастании скорости выше граничной скорости ω>ωгр на выходе блока 15 управления вектором тока (фиг. 1) увеличивается сигнал задания амплитуды синфазного тока Isyn > 0 и угол εd уменьшается из условий поддержания выходной мощности при ограниченном напряжении источника питания 1 и изменяемом коэффициенте связи Iort * и M* согласно техническому решению [2].
Регулятор 16 скорости вырабатывает сигнал задания момента M* электродвигателя в зависимости от входного сигнала рассогласования скорости Δω в соответствии:
где Δω = ω*-ω - рассогласование скорости, коэффициент усиления пропорциональной части регулятора скорости.
коэффициент усиления пропорциональной части регулятора скорости.
Величина заданного момента M* изменяется пропорционально рассогласованию скорости Δω с коэффициентом пропорциональности Kpc и дополнительно изменяется по интегральному закону с постоянной времени интегрирования T4.
Действительный момент электродвигателя M формируется вследствие взаимодействия вектора тока статора  с вектором потокосцепления магнитов ψм согласно выражению:
с вектором потокосцепления магнитов ψм согласно выражению:
где Is - амплитуда фазного тока статора, регулируемая с помощью блока 9 ШИМ-регуляторов фазного тока и сумматора 19 с использованием обратных связей по фазным токам isa, isb, isc.
С целью устойчивого регулирования момента и скорости без датчиков, конструктивно связанных с электродвигателем и обеспечения условия синхронизации (2), сигналы синхронизации cos, sin на входах прямого и обратного преобразователей 11, 14 декартовых координат формируются в функции измеренного двухфазного напряжения статора usα,usβ, величины которых измеряются с помощью датчика 20 двухфазного напряжения на выходе инвертора 3.
На резисторах 21, 22, 23, включенных на выходе инвертора 3 по схеме, соответствующей схеме соединения фазных обмоток статора электродвигателя 6, образуются напряжения, пропорциональные фазным напряжениям Usa, Usb, Usc статора электродвигателя. Через два элемента гальванической развязки два сигнала напряжения Usa, Usb поступают на входы сумматора 26, в результате чего на двух выходах датчика 20 двухфазного напряжения образуются сигналы измеренного двухфазного напряжения статора в соответствии с выражениями:
Опорная фаза "a" для тока isa, выраженного уравнениями (1), (7) и для напряжения Usa, выраженного уравнением (10) реализована в электроприводе по схеме на фиг. 1 непосредственной связью соответствующих входов и выходов каналов "a" и каналов "α", что обеспечивает условия относительности и синхронизации управления и измерения всех векторов относительно неподвижной ориентирующей оси α (фиг. 2) и совпадение осей α и a (фиг. 3).
С выходов датчика 20 двухфазного напряжения usα,usβ. сигналы поступают на входы сумматоров 27, 28, на другие входы которых подаются сигналы измеренного двухфазного тока isα,isβ. На выходах сумматоров 27, 28 образуются сигналы, пропорциональные производным потокосцеплений статора согласно уравнениям: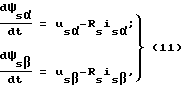
где ψsα,ψsβ - потокосцепления статора, которые вычисляются с помощью интеграторов 29, 30 путем интегрирования указанной в (11) разности напряжения и падения напряжения по каждой из осей α,β.
На выходах интеграторов 29, 30 образуются сигналы косвенно измеренных
потокосцеплений статора ψsα,ψsβ, которые изменяются в функции измеренных величин двухфазного напряжения usα,usβ и двухфазного тока isα,isβ. Сигналы косвенно измеренных потокосцеплений статора ψsα,ψsβ с выходов интеграторов 29, 30 поступают на первые входы сумматоров 31, 32, на вторые входы которых подаются сигналы isα,isβ с выходов обратного преобразователя 17 двухфазно-трехфазных координат.
С помощью указанных сумматоров 31, 32 измеренные величины ψsα,ψsβ,isα,isβ преобразуются в косвенно измеренные величины потокосцепления магнитов ψмα,ψмβ в соответствии с векторной диаграммой, изображенной на фиг. 2 и выражениями:
Проекции ψмα,ψмβ на оси α,β, получаемые в виде выходных сигналов сумматоров 31, 32, выражаются согласно векторной диаграмме фиг. 2 следующими функциями пространственного угла θ продольной оси d постоянных магнитов относительно неподвижной ориентирующей оси α статора: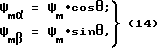
где ψм - постоянная амплитуда потокосцепления постоянных магнитов на роторе.
Сумматоры 31, 32 имеют коэффициент усиления, обратный постоянной величине ψм, в связи с чем выходные сигналы сумматоров 31, 32 имеют нормированную единичную амплитуду и представляют собой периодические функции пространственного угла θ оси d относительно оси α.
Нормированные периодические сигналы cosθ(t),sinθ(t) поступают с выходов сумматоров 31, 32 на косинусный и синусный входы cos, sin прямого и обратного преобразователей 11, 14 декартовых координат и на входы блока 33 вычисления угла и скорости.
Узел 34 деления служит для вычисления тангенса tgθ(t), узел 35 - вычисления арктангенсной функции и узел 36 - вычисления знака выполняют операцию определение знака угла θ и направления вращения ротора электродвигателя. На выходе вычислителя 37 угла образуется сигнал модуля угла  на выходе узла 38 вычисления производной получается сигнал модуля скорости
на выходе узла 38 вычисления производной получается сигнал модуля скорости  Сигнал знака поступает на вход узла 39 умножения и одновременно может подаваться на вход вычислителя 40 положения ротора, в котором с учетом числа пар полюсов электродвигателя Zp производится вычисление угла положения ротора.
Сигнал знака поступает на вход узла 39 умножения и одновременно может подаваться на вход вычислителя 40 положения ротора, в котором с учетом числа пар полюсов электродвигателя Zp производится вычисление угла положения ротора.
С выхода узла 39 умножения на вход обратной связи регулятора 16 скорости поступает сигнал скорости ±ω, величина и знак которого зависят от соотношения измеренных величин фазных напряжений и фазных токов на выходе инвертора 3 и характеризуют действительную скорость ω вращения ротора электродвигателя.
Сигнал обратной связи по скорости ω поступает также на вход блока 15 управления вектором тока, в котором сравнивается с сигналом граничной скорости ωгр и определяет соотношение заданных амплитуд Iort *, Isyn * в зависимости от трех величин: M*,ω,ωгр.
На задающий вход регулятора 16 скорости подается сигнал заданной скорости ω*, который может быть задан с автономного пульта управления электроприводом, либо с выхода регулятора 41 положения, на вход обратной связи которого поступает сигнал θм с выхода вычислителя 40 углового положения ротора.
С автономного пульта управления электроприводом может быть задан один из трех возможных режимов управления путем внешнего задания: 1) заданного момента M*; 2) заданной скорости ω*; 3) заданного положения θ
Сущность способа векторного управления заключается в том, что вектором тока  управляют в зависимости от вектора напряжения
управляют в зависимости от вектора напряжения  вызвавшего этот ток, причем таким образом, что фаза тока статора, равная фазе синхронизации ϕs, изменяется в функции величин напряжения, а синфазный и ортофазный ток, образующие ток статора электродвигателя, регулируют в координатах фазы синхронизации ϕs, синхронизированной во время с пространственным углом θ текущего углового положения продольной оси d постоянных магнитов на роторе за счет изменения фазы ортофазного тока статора по закону:
вызвавшего этот ток, причем таким образом, что фаза тока статора, равная фазе синхронизации ϕs, изменяется в функции величин напряжения, а синфазный и ортофазный ток, образующие ток статора электродвигателя, регулируют в координатах фазы синхронизации ϕs, синхронизированной во время с пространственным углом θ текущего углового положения продольной оси d постоянных магнитов на роторе за счет изменения фазы ортофазного тока статора по закону:
sinϕs= ∫(usβ-Rsisβ)dt-Lsisβ (15)
и фазы синфазного тока статора по закону:
cosϕs= ∫(usα-Rsisα)dt-Lsisα. (16)
Регулирование момента M электродвигателя осуществляется за счет векторных обратных связей путем измерения амплитуд ортофазного и синфазного токов Iort, Isyn относительно фазы синхронизации ϕs, задаваемой измеренным двухфазным напряжением статора по законам (15), (16).
Регулирование скорости ω электродвигателя производится за счет векторных обратных связей путем измерения двухфазного тока и двухфазного напряжения и вычисления текущей скорости в функции фазы синхронизации, определенной по законам (15), (16).
Регулирование положения θм и углового перемещения θм(t) ротора электродвигателя осуществляется за счет косвенной обратной связи по угловому положению θ, образованной векторными обратными связями по двухфазному напряжению и двухфазному току на выходе инвертора.
Указанный способ векторного управления с принудительной ориентацией вектора тока по оси d и автоматической генерацией синусного и косинусного управляющих воздействием sinθ,cosθ непосредственно на выходе инвертора без датчиков, конструктивно связанных с электродвигателем, обеспечивает устойчивость поддержания заданных величин момента M*, скорости ω* и углового положения θ* в широком диапазоне нагрузки и скорости вращения синхронного электродвигателя с постоянными магнитами на роторе.
Промышленная применимость и эффективность использования изобретения для машин и механизмов, где по условиям эксплуатации затруднено применение датчиков на двигателе, обусловлены повышением устойчивости, точности и диапазона регулирования момента, скорости и углового положения ротора, которые достигаются совокупностью трех основных результатов в способе векторного управления и электроприводе: 1) автоматической компенсацией отклонения фазы синхронизации ϕs (фиг. 3) от текущего пространственного угла θ (фиг. 2) и принудительной ориентацией векторных преобразований относительно оси магнитов, производимой в функции вектора напряжения статора  2) автоматической компенсацией отклонения угла фазового сдвига εd вектора тока
2) автоматической компенсацией отклонения угла фазового сдвига εd вектора тока  (фиг. 2) от заданного оптимального значения за счет регулирования синфазного и ортофазного токов в декартовых координатах x, y, вращаемых в функции измеренных векторов
(фиг. 2) от заданного оптимального значения за счет регулирования синфазного и ортофазного токов в декартовых координатах x, y, вращаемых в функции измеренных векторов  и образуемой по формулам фазы ϕs; 3) автоматической компенсацией отклонения момента M и скорости ω от заданных величин M*, ω* за счет пропорционально-интегрального регулирования скорости и момента в функции текущей скорости ω, вычисленной по измеренным векторам Us, is.
и образуемой по формулам фазы ϕs; 3) автоматической компенсацией отклонения момента M и скорости ω от заданных величин M*, ω* за счет пропорционально-интегрального регулирования скорости и момента в функции текущей скорости ω, вычисленной по измеренным векторам Us, is.
Технико-экономическая эффективность достигается тем, что получают практически абсолютную жесткость и линейность механических характеристик в широких пределах изменения нагрузки Ms и в широком диапазоне плавного регулирования скорости от нулевой скорости ω = 0 (в режиме упора) до двухкратной скорости от граничной величины ω≤2ωгр без датчика скорости и без любых других датчиков, конструктивно связанных с электродвигателем. Это новое свойство позволяет применять по новому наиболее компактный и экономичный по потреблению электроэнергии синхронный электродвигатель с возбуждением от постоянных магнитов на роторе в химически активных, жидкостных, радиоактивных средах, в дистанционно управляемых и в мобильных агрегатах, где установка на электродвигателе каких-либо датчиков невозможна.
Применение по новому назначению синхронного электродвигателя с постоянными магнитами на роторе достигается благодаря способу управления и электроприводу, предложенным в изобретении, при выполнении требований по устойчивости, точности и диапазону регулирования момента и скорости с наибольшим экономическим эффектом в следующих направлениях:
- глубинные погружные электронасосы в нефтяных скважинах для добычи нефти, где использование в два раза укороченных электродвигателей с постоянными магнитами взамен асинхронных электродвигателей с постоянными магнитами взамен асинхронных электродвигателей прежде всего для наклонно-направленных скважин дает экономический эффект для нефтедобывающих предприятий более 10 млн. долларов в год;
- подводные аппараты с жидкостнозаполненным электродвигателем при питании от аккумуляторных батарей и требовании максимального ресурса до перезаряда;
- следящие электроприводы в атомных реакторах для регулирования положения графитовых стержней, для крановых механизмов и манипуляторов, где использование фотоэлектрических датчиков на электродвигателе невозможно из-за радиоактивности среды;
- электромобили, для которых требование минимального потребления электроэнергии и минимальных массы и габаритов электродвигателя сочетаются с требованиями расширения диапазона регулирования скорости с постоянством мощности выше основной скорости при отсутствии датчиков на электродвигателе;
- электрошпиндели станков, где габариты датчика на электродвигателе ограничивают скорость и рабочую зону обработки, а исключение датчика на электродвигателе дает расширение возможностей обработки;
- специальные роботы, бортовые системы автоматики, специальные следящие системы, в которых требуется точная отработка заданного перемещения рабочего органа механизма при отсутствии датчиков на валу, особенно в случаях применения микроэлектродвигателей, масса и габариты которых соизмеримы или меньше в сравнении со стандартными датчиками скорости и углового положения.
Источники информации
1. Патент Российской Федерации N 1458951, кл. 4 H 02 M 7/40 Мищенко В.А. , Мищенко Н.И. Способ управления многофазным инвертором и устройство для его осуществления. Приоритет 26.03.1984 г. Зарегистрировано в Госреестре 15.11.1988 г. , 15.02.1989 г. Вып. N 6. Действует взамен авторского свидетельства с 01.07.1991 г. Патентообладатель: Мищенко В.А.
2. Авторское свидетельство N 1681371, кл. 5 H 02 P 5/40 Мищенко В.А., Мищенко Н. И. Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе. Приоритет 31.03.1987 г. Зарегистрировано 01.06.1991 г., опубл. 30.09.91 Бюл. N 36.
Перечень фигур к заявке на изобретение "Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе и электропривод для осуществления этого способа"
Фиг. 1 Функциональная схема электропривода с синхронным электродвигателем.
Фиг. 2. Диаграмма пространственных векторов состояния электродвигателя.
Фиг. 3. Диаграмма временных векторов, поясняющие способ векторного управления.
Перечень обозначений на фиг. 1 "Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе и электропривод для осуществления этого способа"
1 - источник питания (выпрямитель, аккумуляторная батарея);
2 - конденсатор фильтра;
3 - инвертор (транзисторный на IGBT - модулях или БТИЗ-модулях);
4,5 - датчик фазного тока;
6 - синхронный электродвигатель;
7 - постоянные магниты на роторе;
8 - блок формирования импульсов (драйвер IGBT-модулей);
9 - блок ШИМ-регуляторов тока;
10 - прямой преобразователь двухфазно-трехфазных координат;
11 - прямой преобразователь декартовых координат;
12 - регулятор ортофазного тока;
13 - регулятор синфазного тока;
14 - обратный преобразователь декартовых координат;
15 - блок управления вектором тока;
16 - регулятор скорости;
17 - обратный преобразователь двухфазно-трехфазных координат;
18 - сумматор;
19 - сумматор;
20 - датчик двухфазного напряжения;
21, 22, 23 - резисторы;
24, 25 - элемент гальванической развязки;
26 - сумматор;
27, 28 - сумматор;
29, 30 - интегратор;
31, 32 - сумматор;
33 - блок вычисления угла и скорости;
34 - узел деления;
35 - узел вычисления арктангенсной функции;
36 - узел вычисления знака;
37 - вычислитель угла;
38 - узел вычисления производной;
39 - узел умножения;
40 - вычислитель углового положения ротора;
41 - регулятор положения.
Изобретение может использоваться для регулирования момента, скорости и углового положения рабочих органов машин и механизмов без датчиков, конструктивно связанных с синхронным электродвигателем, в частности для глубинных погружных электронасосов в нефтедобыче, в электромобилях, в бортовых устройствах автоматики. Технический результат - повышение устойчивости, диапазона и точности регулирования момента и скорости без датчика скорости - достигается в способе векторного управления синфазным и ортофазным токами статора путем измерения двухфазного напряжения статора и регулирования фаз синфазного и ортофазного токов статора и скорости ротора по измеренным двухфазным величинам напряжения и тока статора. Электропривод содержит датчик двухфазного напряжения, выходы которого соединены через интеграторы с синусным и косинусным входами прямого и обратного преобразователей декартовых координат и со входами блока вычисления угла положения ротора и скорости вращения ротора. 2 с. и 3 з.п.ф-лы, 3 ил.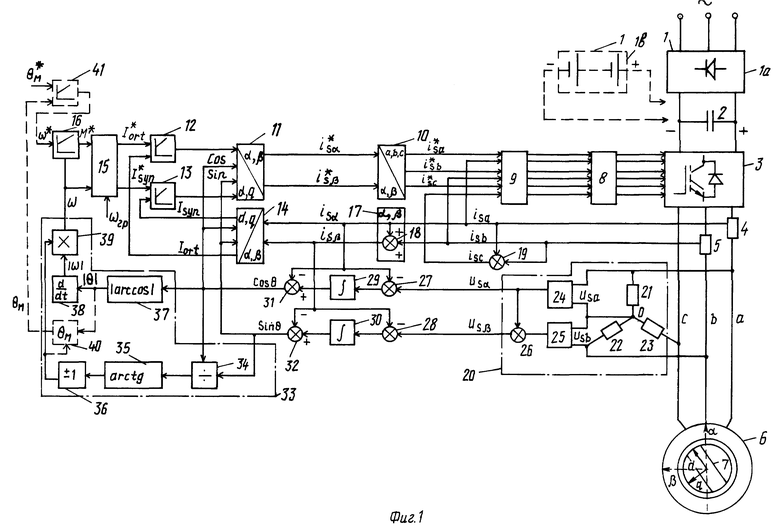
где Rs - активное сопротивление фазной обмотки статора;
Ls - индуктивность фазной обмотки статора,
вычисляют текущую величину скорости ротора как производную фазы синхронизации и изменяют величину заданного момента пропорционально рассогласованию вычисленной текущей скорости и заданной.
| Способ векторного управления синхронным электродвигателем с постоянными магнитами на роторе | 1987 |
|
SU1681371A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Устройство для изучения дифракции медленных электронов | 1934 |
|
SU43973A1 |
| CH 6811231 A, 24.09.92. | |||
