Изобретение относится к энергетике, в частности к универсальным энергетическим установкам, которые могут найти применение для перемещения различных, практически любых, объектов, которые необходимо переместить из одного места в другое, например данная энергетическая установка может найти применение в транспортной технике как наземной, так и воздушной или надводной.
Известна энергоустановка транспортного средства на воздушной подушке, содержащая несущую конструкцию с платформой, гибкое боковое ограждение, источник создания повышенного давления в зоне ограждения и колесный ход (см. патент GB №1465382, кл. В60V 1/00, 23.02.1977).
В этом транспортном средстве источник создания повышенного давления удален от опорной поверхности, поэтому формирование воздушной подушки происходит за счет статического повышения давления в зоне ограждения между основанием транспортного средства и опорной поверхностью без использования эффекта скоростного напора, что ограничивает подъемную силу формируемой воздушной подушки и требует повышенного расхода воздуха, что резко ограничивает возможности по использованию данной энергоустановки для перемещения, в данном случае, транспортного средства.
Наиболее близкой к изобретению по технической сущности и достигаемому результату является энергетическая установка для привода транспортного средства, содержащая корпус с двигателем, системы трансмиссии и управления и автомобильные опорно-ходовые узлы, а также установленные на корпусе лопастные движители (см. патент JP №1285414, кл. В60F 5/02, 16.11.1989).
Данная энергоустановка позволяет создавать устройства, которые могут перемещаться на колесах по земле и по воздуху за счет взаимодействия лопастей вращающихся роторов с окружающей средой. Однако эффективность данной энергоустановки невелика, поскольку перемещение различного рода объектов по воздуху, например боевой техники, требует больших затрат энергии.
Задачей, на решение которой направлено настоящее изобретение, является повышение эффективности взаимодействия вращающихся лопастей роторов движителей энергоустановки с окружающей средой за счет увеличения подъемной силы лопастей.
Техническим результатом, достигаемым от реализации изобретения, является повышение экономичности энергоустановки и, за счет этого, обеспечение возможности перемещения практически любых объектов в любом удобном направлении: по земле или по воздуху.
Указанная задача решается, а технический результат достигается за счет того, что энергетическая установка для привода транспортного средства содержит корпус с двигателем, системы трансмиссии и управления и автомобильные опорно-ходовые узлы, а также установленные на корпусе лопастные движители, при этом в корпусе установлен компрессор с емкостями и устройством формирования управляющей среды, в качестве движителей использованы лопастные ортогональные движители со струйным управлением обтекания лопастей набегающей на них средой, для чего в последних выполнены две продольные полости для подачи управляющей среды в выполненные в лопастях вдоль последних струеобразующие выходные щелевые отверстия, движители закреплены на вертикальных стойках под корпусом или над ним под острыми углами к продольной оси симметрии транспортного средства в горизонтальной и вертикальной плоскостях, при этом движители выполнены с регулируемым механическим приводом вращения от двигателя, лопасти движителей выполнены аэродинамического профиля, две продольные полости с выходными щелевыми отверстиями образованы внутри лопастей посредством разделяющей внутреннее пространство лопастей продольной перегородки, каждая из продольных полостей разделена поперечной перегородкой с формированием корневого, расположенного со стороны оси транспортного средства для создания постоянно действующей регулируемой подъемной силы, и концевого участка для управления движением транспортного средства, при этом управляющая среда к каждому из участков подается раздельно, выходные щелевые отверстия выведены на соответствующую поверхность лопасти в зону за точкой максимальной толщины ее профиля, лопасти установлены на полом приводном валу вокруг и вдоль последнего на радиально расположенных полых обтекаемого профиля траверсах, посредством которых полости лопастей сообщены с полым приводным валом, внутри последнего коаксиально расположены второй и третий полые валы, в которых выполнены овальные отверстия, сообщенные посредством траверс, соответственно с продольными полостями корневого и концевого участков лопастей, причем овальные отверстия выполнены на противоположных стенках второго и третьего полых валов с возможностью создания струи, соответственно, на внешней и внутренней поверхностях противоположно расположенных относительно друг друга лопастей.
Второй и третий полые валы могут быть установлены с возможностью поворота относительно полого приводного вала.
Оси лопастей каждого движителя могут быть выполнены по винтовой линии, причем основания соседних лопастей расположены напротив друг друга в радиальном направлении для устранения динамического дисбаланса сил, развиваемых движителем, причем один конец лопасти расположен с внешней стороны, а другой конец - с внутренней стороны относительно соседней лопасти.
Соседние лопасти каждого движителя могут быть выполнены по винтовой линии с противоположным углом закрутки, образуя пространственную ферму.
Каждый движитель может быть выполнен с двумя рядами перекрещивающихся лопастей, причем концы лопастей одного ряда расположены посередине на дуге окружности между концами лопастей другого ряда, а в местах пересечения оси лопастей сдвинуты по радиусу, образуя в сечении фигуру биплана для устранения динамического дисбаланса изгибающего момента в опорах движителей.
Каждый движитель может быть выполнен с двумя рядами перекрещивающихся лопастей, причем оси лопастей выполнены прямыми, а концы лопастей одного ряда расположены посередине на дуге окружности, описываемой концами лопастей, между концами лопастей другого ряда, а в местах пересечения оси лопастей сдвинуты по радиусу.
В данной энергоустановке путем использования струйного управления пограничным слоем на полой лопасти аэродинамического профиля, движущейся по окружности, достигается возможность значительно увеличить подъемную силу лопастей, для чего в заранее заданный момент времени, а именно в момент, когда лопасть находится в верхней или нижней точке вращения, на поверхность лопасти из ее полости подается струя управляющей среды, обтекающая верхнюю профилированную поверхность лопасти, что и позволяет создать значительную подъемную силу. Согласно опытным данным коэффициент подъемной силы может достигать CL=2.2 Это означает, что при скорости лопасти, например, 100 м/с (частота вращения лопастей вокруг приводного вала - 3000 об/мин и диаметр окружности, описываемой лопастями, 0.65 м) на лопасть с хордой 0.2 м будет действовать подъемная сила, равная 280 кг на погонный метр длины лопасти.
Если установлено 2 лопасти, расположенные симметрично относительно центра вращения, то развиваемая ими сила, например, в вертикальном направлении составит 560 кг/м.
Однако установка лопастей с прямой осью параллельно оси приводного вала приводит к созданию пульсирующей подъемной силы. Пульсацию подъемной силы можно полностью устранить, используя конструкцию установки с лопастями, имеющими изогнутую по винтовой линии ось, что позволяет создать из лопастей пространственную ферму. Достаточно близкого результата можно добиться, если каждый движитель выполнить с двумя рядами перекрещивающихся лопастей, причем оси лопастей выполнить прямыми, а концы лопастей одного ряда расположить посередине на дуге окружности, описываемой концами лопастей, между концами лопастей другого ряда, а в местах пересечения оси лопастей сдвинуть по радиусу. При этом значительно упрощается технология изготовления лопастей.
Дальнейшего уменьшения практически до нуля пульсации при создании подъемной силы и уменьшения изгибающего момента в опорах движителя удалось добиться за счет того, что созданные лопастями решетчатые пространственные фермы движителя в узлах пересечения лопастей выполнены в форме биплана, т.е. когда одна из лопастей находится под другой лопастью движителя.
Принципиальный характер имеет принцип подачи управляющей среды в лопасти движителей. Так для повышения эффективности управления могут быть введены промежуточные траверсы с соответствующим разделением полостей каждой лопасти поперечной перегородкой. Таким образом, каждая из продольных полостей разделена поперечной перегородкой с формированием корневого, расположенного со стороны оси транспортного средства для создания постоянно действующей регулируемой подъемной силы, и концевого участка для управления движением транспортного средства. Управляющая среда к каждому из участков подается раздельно, что позволяет обеспечить высокую маневренность при перемещении по воздуху с обеспечением возможности резкой смены направления перемещения.
На фиг.1 схематически представлена энергоустановка, установленная на транспортном средстве.
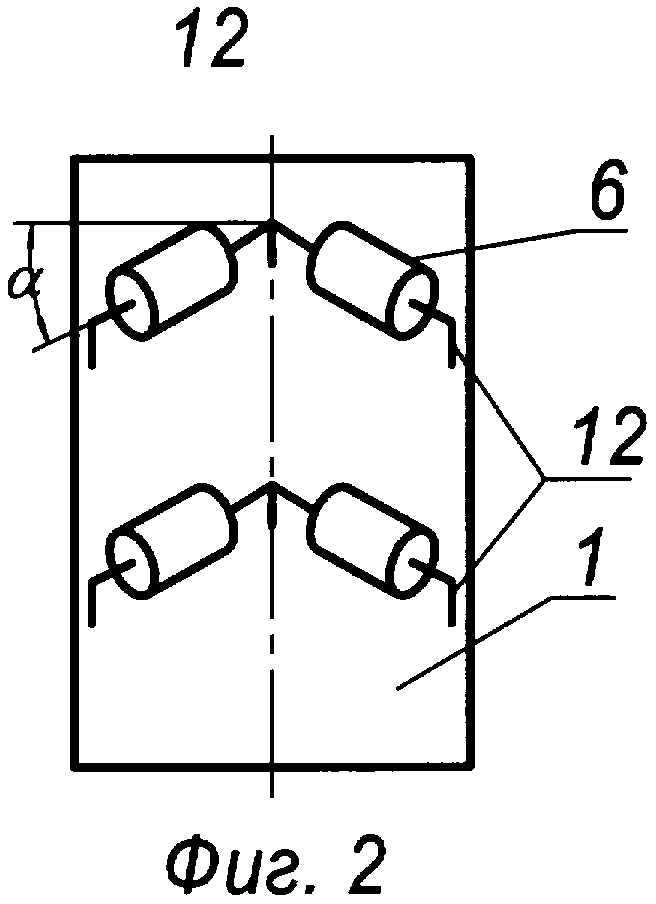
На фиг.2 - схематически вид сверху на транспортное средство.
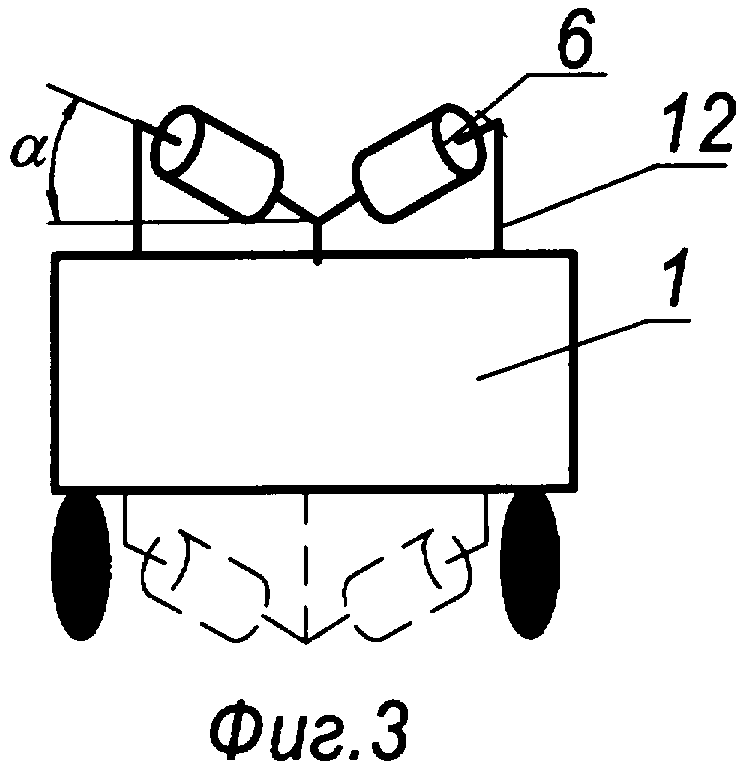
На фиг.3 - схематически вид сбоку на транспортное средство.
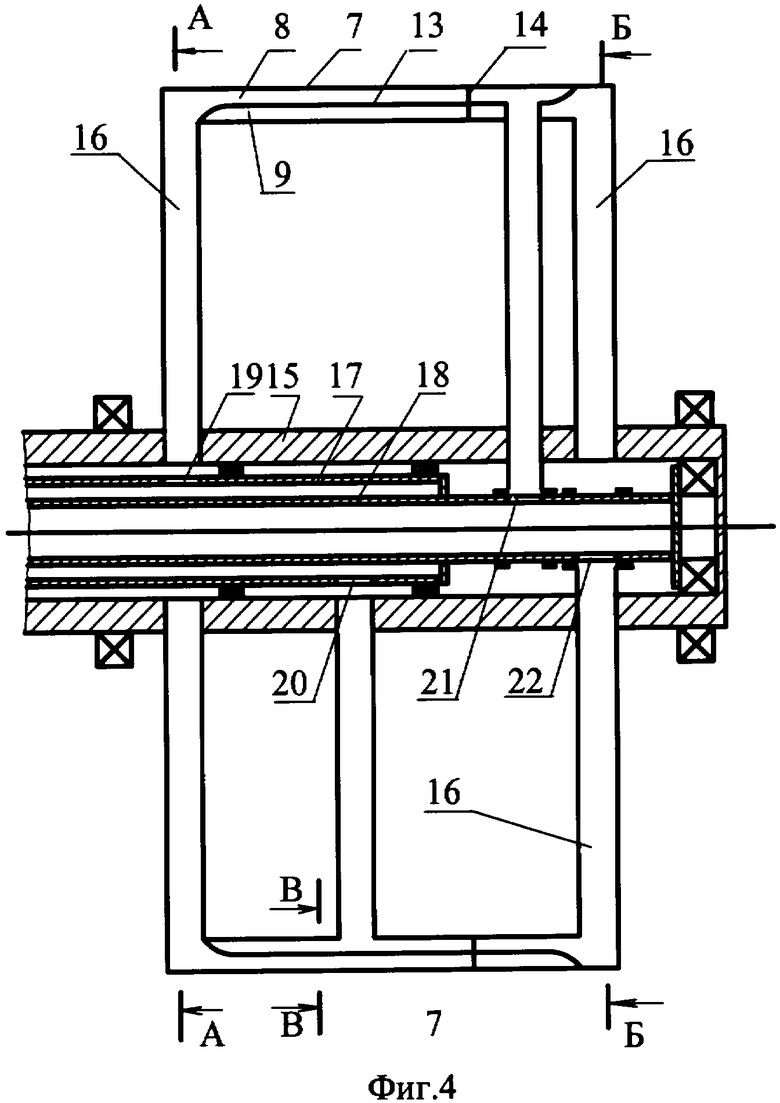
На фиг.4 - продольный разрез одного из движителей.
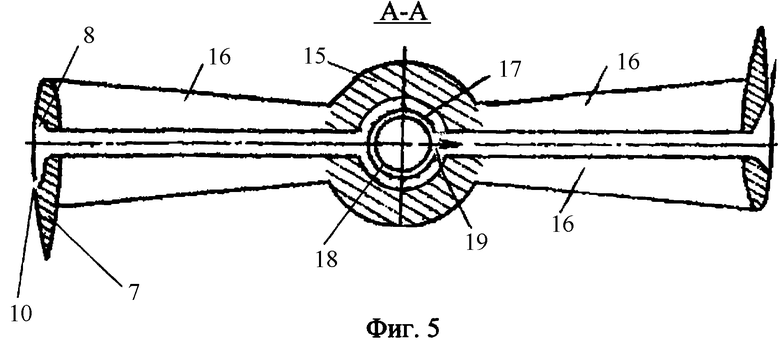
На фиг.5 - разрез А-А на фиг.3.
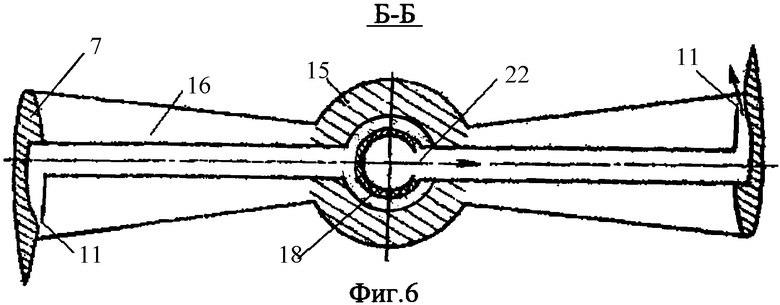
На фиг.6 - разрез Б-Б на фиг.3.
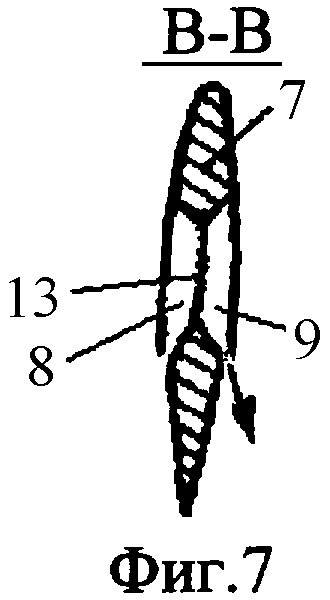
На фиг.7 - разрез В-В на фиг.3.
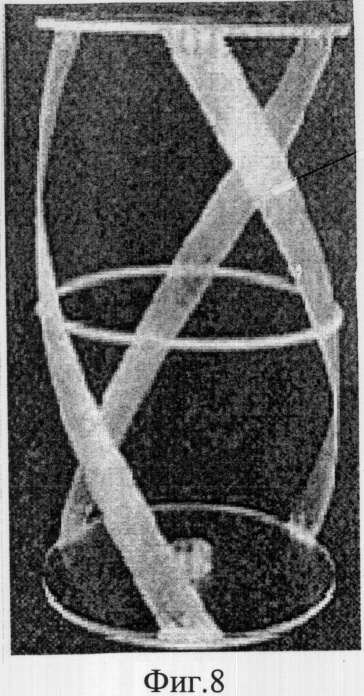
На фиг.8 - общий вид криволинейных лопастей движителя.
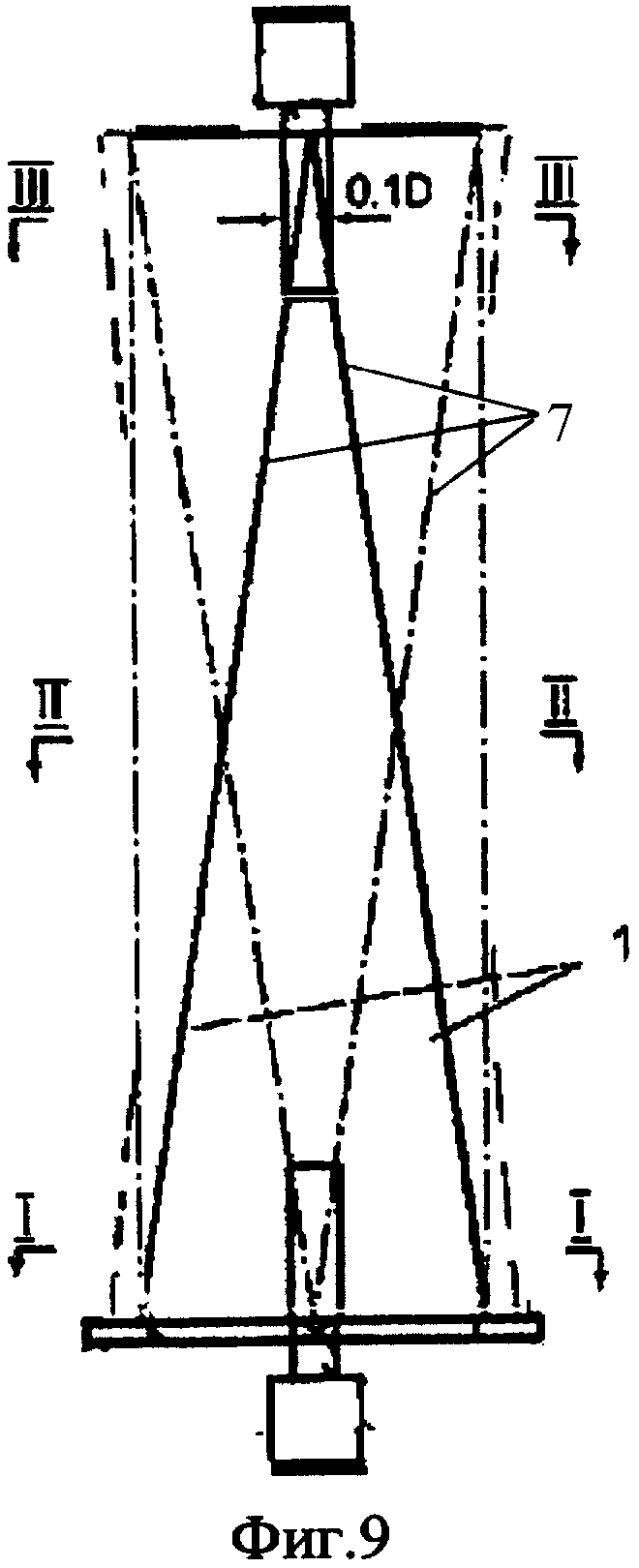
На фиг.9 - схема расположения лопастей в два ряда с прямыми осями лопастей.
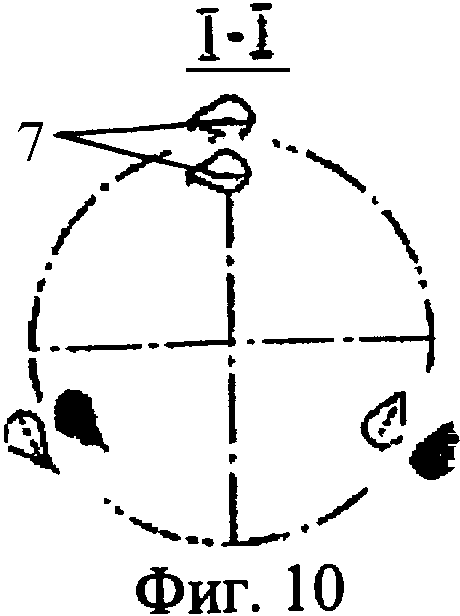
На фиг.10 - сечение I-I на фиг.9.
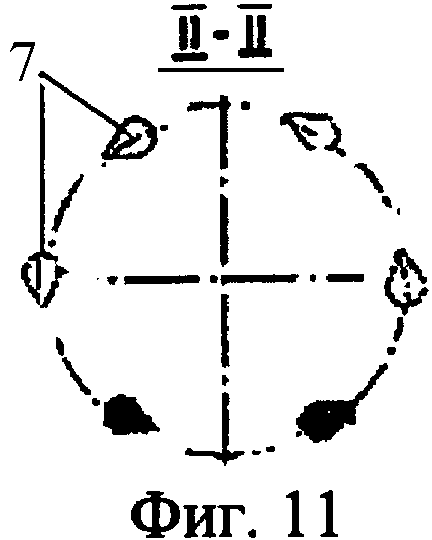
На фиг.11 - сечение II-II на фиг.9.
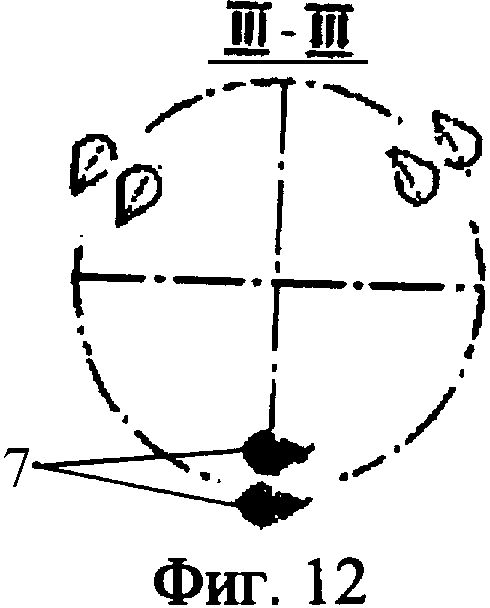
На фиг.12 - сечение III-III на фиг.9.
Энергетическая установка для привода транспортного средства содержит корпус 1 с двигателем 2, системы трансмиссии 3 и управления 4 и автомобильные опорно-ходовые узлы 5, например колеса автомобиля или гусеницы трактора, а также установленные на корпусе 1 лопастные движители 6. В корпусе 1 установлен компрессор с емкостями и устройством формирования управляющей среды (не показаны на чертеже). В качестве движителей 6 использованы лопастные ортогональные движители со струйным управлением обтекания лопастей 7 набегающей на них средой, для чего в последних выполнены две продольные полости 8, 9 для подачи управляющей среды в выполненные в лопастях 7 вдоль последних струеобразующие выходные щелевые отверстия, соответственно 10 и 11. Движители 6 закреплены на вертикальных стойках 12 под корпусом 1 (пунктиром) или над ним (фиг.3) под острыми углами α к продольной оси симметрии транспортного средства в горизонтальной и вертикальной плоскостях. Движители 6 выполнены с регулируемым механическим приводом вращения от двигателя 2. Лопасти 7 движителей 6 выполнены аэродинамического профиля. Две продольные полости 8 и 9 с выходными щелевыми отверстиями 10 и 11 образованы внутри лопастей 7 посредством разделяющей внутреннее пространство лопастей 7 продольной перегородки 13. Каждая из продольных полостей 8 и 9 разделена поперечной перегородкой 14 с формированием корневого, расположенного со стороны оси транспортного средства для создания постоянно действующей регулируемой подъемной силы, и концевого участка для управления движением транспортного средства, при этом управляющая среда к каждому из участков подается раздельно. Выходные щелевые отверстия 10 и 11 выведены на соответствующую поверхность лопасти 7 в зону за точкой максимальной толщины ее профиля. Лопасти 7 установлены на полом приводном валу 15 вокруг и вдоль последнего на радиально расположенных полых обтекаемого профиля траверсах 16, посредством которых полости 8 и 9 лопастей 7 сообщены с полым приводным валом 15. Внутри последнего коаксиально расположены второй 17 и третий 18 полые валы, в которых выполнены овальные отверстия 19, 20 (вал 17) и 21, 22 (вал 18), сообщенные посредством траверс 16, соответственно с продольными полостями 8 и 9 корневого и концевого участков лопастей 7. Овальные отверстия 19 и 20, а также 21 и 22 выполнены на противоположных стенках, соответственно второго 17 и третьего 18 полых валов с возможностью создания струи, соответственно, на внешней и внутренней поверхностях противоположно расположенных относительно друг друга лопастей 7.
Второй 17 и третий 18 полые валы установлены с возможностью поворота относительно полого приводного вала 15.
Оси лопастей 7 каждого движителя 6 могут быть выполнены по винтовой линии, причем основания соседних лопастей 7 расположены напротив друг друга в радиальном направлении для устранения динамического дисбаланса сил, развиваемых движителем 6, причем один конец лопасти 7 расположен с внешней стороны, а другой конец - с внутренней стороны относительно соседней лопасти 7.
Соседние лопасти 7 каждого движителя 6 (см. фиг.8) выполнены по винтовой линии с противоположным углом закрутки, образуя пространственную ферму.
Каждый движитель 6 выполнен с двумя рядами перекрещивающихся лопастей 7, причем концы лопастей 7 одного ряда расположены посередине на дуге окружности между концами лопастей 7 другого ряда, а в местах пересечения оси лопастей 7 сдвинуты по радиусу, образуя в сечении фигуру биплана для устранения динамического дисбаланса изгибающего момента в опорах движителей 6.
Каждый движитель 6 (см. фиг.9) выполнен с двумя рядами перекрещивающихся лопастей 7, причем оси лопастей 7 выполнены прямыми, а концы лопастей 7 одного ряда расположены посередине на дуге окружности описываемой концами лопастей 7, между концами лопастей 7 другого ряда, а в местах пересечения оси лопастей 7 сдвинуты по радиусу.
При движении транспортного средства с описанной энергетической установкой по обычной дороге управление циркуляцией выключено, а второй и третий полые валы 17 и 18 располагают в приводном валу 15 таким образом, что овальные отверстия 19, 20, 21 и 21 перекрыты стенкой приводного вала 15. При необходимости создания упора (притормаживание) включается трансмиссия 3, обеспечивающая вращение лопастей 7 движителей 6, а второй 17 и третий 18 валы с овальными отверстиями 19, 20, 21 и 22 поворачивают и располагают овальные отверстия 19-21 почти вертикально с небольшим наклоном в сторону направления движения. При необходимости поворота этот наклон увеличивается на стороне обгона, т.е. именно с этой стороны транспортного средства. При обратном положении овальных отверстий 19-21 осуществляется аэродинамическое торможение. Величина подъемной силы и скорость движения регулируется частотой вращения приводного вала 15 и расходом в системе подачи управляющей среды.
Изложенная схема отражает принципиальную базу предложения. Для изделий большой грузоподъемности функции взвешивания (подъема) изделия, в данном случае транспортного средства и управления движением, разделяются путем раздельной подачи управляющей среды в концевые и корневые участки лопастей 7, причем для создания чисто подъемной силы овальные отверстия 19-21 располагают вертикально.
Настоящее изобретение может быть использовано в автомобильной, строительной, нефтегазодобывающей и других отраслях промышленности, где необходимо транспортировать, поднимать или перемещать различные грузы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОУСТАНОВКА С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2014 |
|
RU2558716C1 |
| Энергоустановка с управляемой реактивной тягой | 2017 |
|
RU2687190C2 |
| ВЫСОТНАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2003 |
|
RU2240444C1 |
| ВЕТРОВОЙ ЭНЕРГЕТИЧЕСКИЙ АГРЕГАТ | 2014 |
|
RU2558491C1 |
| ВОЛНО-ПОТОЧНАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2007 |
|
RU2351793C1 |
| ГИДРОЭНЕРГОУСТАНОВКА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ТЕЧЕНИЙ | 2003 |
|
RU2242634C1 |
| Ортогональный энергетический агрегат | 2017 |
|
RU2686816C2 |
| ЭНЕРГОУСТАНОВКА ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ТЕЧЕНИЯ ВОЗДУШНЫХ ИЛИ ВОДНЫХ ПОТОКОВ | 2008 |
|
RU2388932C1 |
| Крыльчатый ортогональный движитель | 1989 |
|
SU1634567A1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ВЕРТИКАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ | 2003 |
|
RU2240443C1 |
Изобретение относится к области энергетики и предназначено для использования в транспортной технике. Энергетическая установка содержит корпус с двигателем, системы трансмиссии и управления и автомобильные опорно-ходовые узлы. В корпусе установлен компрессор с емкостями и устройством формирования управляющей среды. Имеются движители в виде лопастных ортогональных движителей со струйным управлением обтекания лопастей набегающей на них средой. В лопастях выполнены две продольные полости для подачи управляющей среды и струеобразующие выходные щелевые отверстия. Движители закреплены на вертикальных стойках под корпусом или над ним под острыми углами к продольной оси симметрии транспортного средства в горизонтальной и вертикальной плоскостях. Движители выполнены с регулируемым механическим приводом вращения от двигателя. Лопасти движителей выполнены аэродинамического профиля. Две продольные полости с выходными щелевыми отверстиями образованы внутри лопастей посредством разделяющей внутреннее пространство лопастей продольной перегородки. Каждая из продольных полостей разделена поперечной перегородкой с формированием корневого участка для создания постоянно действующей регулируемой подъемной силы и концевого участка для управления движением транспортного средства. Управляющая среда к каждому из участков подается раздельно. Выходные щелевые отверстия выведены на соответствующую поверхность лопасти в зону за точкой максимальной толщины ее профиля. Лопасти установлены на полом приводном валу вокруг и вдоль последнего на радиально расположенных полых обтекаемого профиля траверсах. Посредством этих траверс полости лопастей сообщены с полым приводным валом. Внутри последнего коаксиально расположены второй и третий полые валы. На противоположных стенках второго и третьего валов выполнены овальные отверстия, расположенные с возможностью создания струи, соответственно, на внешней и внутренней поверхностях противоположно расположенных относительно друг друга лопастей. Овальные отверстия сообщены посредством траверс, соответственно, с продольными полостями корневого и концевого участков лопастей. Изобретение направлено на повышение эффективности взаимодействия вращающихся лопастей роторов движителей энергоустановки с окружающей средой за счет увеличения подъемной силы лопастей. 5 з.п. ф-лы, 12 ил.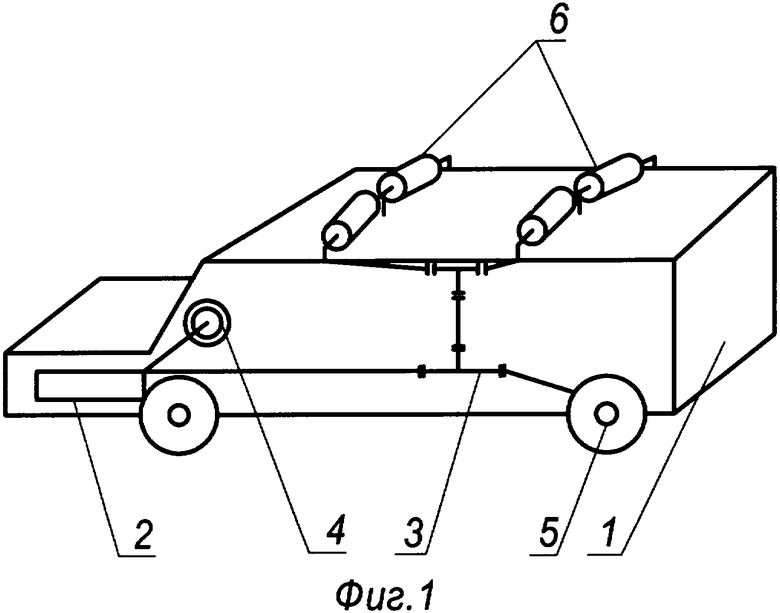
| Способ функционального контроля интегральных схем | 1985 |
|
SU1285414A1 |
| АВТОМОБИЛЬ | 1992 |
|
RU2048358C1 |
| Вибрационное транспортирующее устройство | 1987 |
|
SU1465382A1 |
| US 4327808 А, 04.05.1982. | |||

