Фиг.1
i Изобретение относится к области авто- :матики инерционных конвейеров и может :быть использовано при автоматизации процессов транспортировки деталей с помощью вибрационных загрузочных устройств. Целью изобретения является повышение быстродействия и функциональной надежности устройства.
На фиг. 1 изображена структурная схе- JMa предлагаемого устройства; на фиг. 2 - |временные диаграммы его работы; на фиг. 3 и 4 - структурная схема и временные диаграммы работы экстремального селектора 3; на фиг. 5 и фиг. 6 - струк- |турная схема и временные диаграммы ра- |боты преобразователя период - напряжение. : Вибрационное транспортирующее уст- ipOKCTBO содержит рабочий орган (чашу или |платформу). 1, на котором расположен дат- |чик 2 гармонических колебаний экстре- |мальнь й селектор 3, блок 4, аналоговой па- |мяти, генератор 5 линейно-изменяющегося |напряжения (ГЛИН)элемент 6 совпадения, усилитель 7 мощности, электромагнит 8, |преобразователь 9 период - напряжение, |задатчик 10 амплитуды, блок 11 умноже- |ния и блок 12 сравнения.
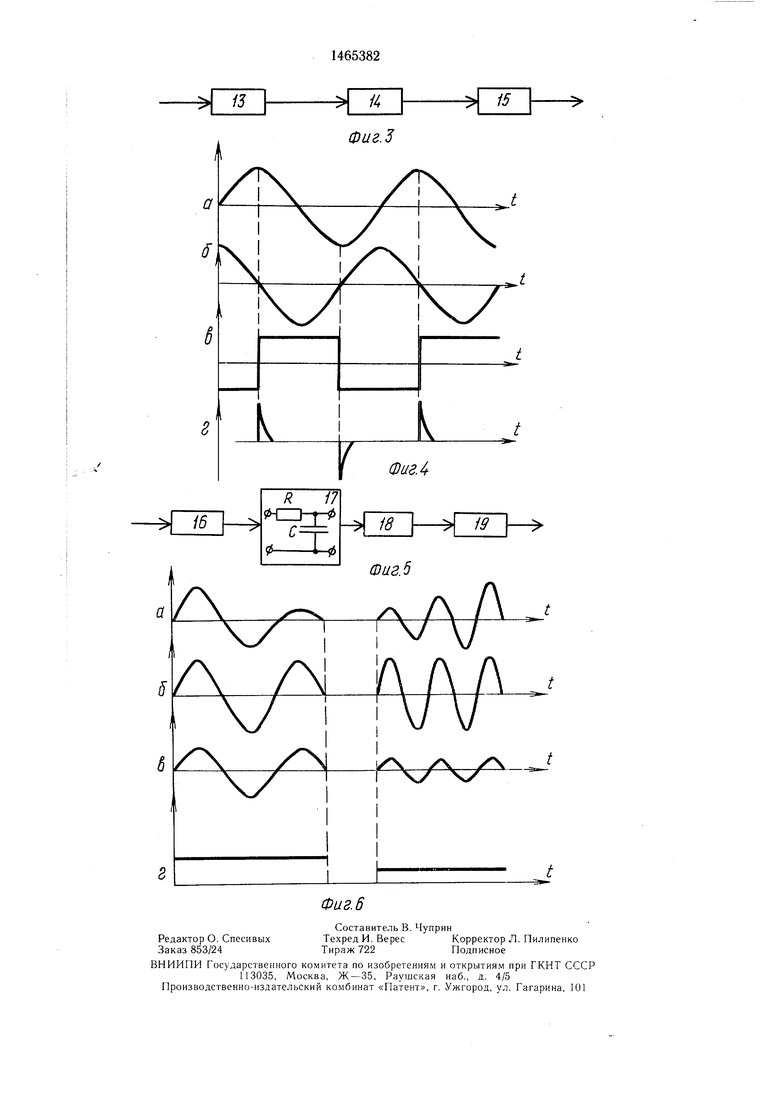
; Экстремальный селектор содержит дифференциатор 13, компаратор 14 и диффе- ренцирующую цепь 15.
Преобразователь период - напряжение содержит блок 16 фазовой автоподстройкн частоты, интегрирующую цепь 17, усилитель 18 и амплитудный детектор 19. ; Устройство работает следующим образом. ; При запуске вибрационного транспорт- :ного устройства рабочий орган 1 начина- :ет колебаться и на выходе датчика 2 гармонических колебаний появляется гарм.они- ческий сигнал напряжения с частотой собственных колебаний рабочего органа 1 (фиг. 2а). Этот сигнал поступает на экстремальный селектор 3, который вырабатывает положительные импульсы в первый полупериод колебания и отрицательные - во второй полупериод колебания (фиг. 26). Отри- цательные импульсы поступают на блок 4 аналоговой памяти. В моменты поступления этих импульсов происходит запоминание блоком 4 аналоговой памяти амплитудного значения напряжения, поступающего с датчика 2 гармонических колебаний. Положительные импульсы с экстремального селектора 3 запускают ГЛИП 5 и затем через элемент 6 совпадения и усилитель 7 мощности обеспечивают подачу управляющего импульса на электромагнит 8 (фиг. 2«).
Таким образом, управляющие импульсы поступают на электромагнит 8 синфазно с собственными колебаниями рабочего органа 1, чем обеспечивается резонансный режим работы устройства при изменении параметров электромеханической системы.
Одновременно проходят процессы формирования длительности управляющих импульсов напряжения, определяющих амплитуду колебания рабочего органа 1. Сигнал с дат чика 2 гармонических колебаний поступает на преобразователь 9 период - напряжение, с выхода которого снимается напряжение, пропорциональное периоду колебаний рабочего органа 1 (фиг. 2е). С выхода преобразователя 9 период - напряжение сиг0 нал поступает на первый вход блока 11 умножения. На второй вход блока 11 умножения сигнал подается от задатчика 0 амплитуды в виде постоянного напряжения, определяющего скорость вибротранспортиро5 вания на определенной частоте (фиг. 2ж). Результирующий сигнал с блока 11 умножения поступает на первый вход блока 12 сравнения, где он сравнивается с сигналом, поступающим на второй вход с блока 4 аналоговой памяти. Сигнал блока L2 сравне0 ния подается на элемент 6 совпадения, отключая его в тот момент, когда сигнал с ГЛИН 5 станет равным сигналу с блока 12 сравнения (фиг. 2з). Тем самым формируется длительность управляющих им5 пульсов напряжения, поступающих через усилитель 7 мощности на электромагнит 8. Таким образом, предлагаемое устройство представляет собой двухконтурную систему регулирования.
Q Первый контур содержит датчик 2 гармонических колебаний, блок 4 аналоговой памяти, экстремальный селектор 3, ГЛИН 5, блок 12 сравнения, элемент 6 совпадения, усилитель 7 мощности, электромагнит 8, рабочий орган 1 и обеспечивает стабил -;5 зацию амплитуды колебания рабочего органа в режиме собственных частот на уровне, задаваемом сигналом, поступившим на блок 12 сравнения. Второй контур содержит задатчик 10 амплитуды, преобразователь 9 период --- напряжение, блок 11 умно0 жения и формирует напряжение, соответствующее заданной скорости вибротракспор- тирования, которое подэется на б.пок 12 сравнения.
Экстремальный селектор 3 может быть э выполнен в виде, последовательного соединения дифференциатора 13, компаратора 4 и дифференцирующей цепи i.5. С вь-хода датчика 2 гармонического сигнала сигнал поступает на вход дифференциатора 13 Q (фиг. 4а).
На выходе дифференциатора 13 появляется напряжение, пропорциональное производной сигнала на его входе (фиг. 46). Это напряжение поступает на вход компаратора 14, формирующего прямоугольные им- 5 пульсы, передние фронты кото рых соответствуют максимумам, а задние - минимумам сигнала, поступающего на вход дифференциатора 13 (фиг. 4в).
Дифференцирующая цепь 15 формирует короткие импульсы соответствующей полярности (фиг. 4г).
Сигнал с датчика 2 гармонического сигнала поступает на вход блока 16 фазовой автоподстройки частоты (БФАП). БФАП 16 формирует на выходе синусоидальный сигнал постоянной амплитуды, совпадающий по фазе с сигналом на его входе (фиг. 66), который поступает на вход интегрирующей цепи 17, представляющий собой последовательное соединение резистора R и емкости С. В соответствии с законом Ома для переменного тока напряжение на выходе интегрирующей цепи 17 равно у .
2jTCVR4(T/2rC/2
где Т - период входного напряжения.
При выполнении условия выходное напряжение будет пропорционально периоду входного сигнала (фиг. 6s) UBb,,
где . .
С выхода интегрирующей цепи сигнал через усилитель 18 поступает на вход амплитудного детектора 19, на выходе которого формируется постоянное напряжение, пропорциональное периоду поступающего на вход преобразователя 9 период - на пряжение (фиг. 6г).
Формула изобретения
1. Вибрационное транспортирующее устройство, содержащее рабочий орган с датчиком гармонических колебаний, выход которого соединен с входом экстремального селектора, задатчик амплитуды, генератор линейно-изменяющегося напряжения, элемент совпадения, выход которого через
5 усилитель мощности соединен с электромагнитом, закрепленным на рабочем органе, отличающееся тем, что, с целью по- выщения быстродействия и функциональной надежности устройства, в неге введены блок
0 умножения, преобразователь период - напряжение и блок аналоговой памяти, выход которого соединен с первым входом блока сравнения, выход которого соединен с первым входом элемента совпадения, выход датчика гармонических колебаний сое динен с первым входом блока аналоговой памяти и входом преобразования период - напряжение, выход которого соединен с первым входом блока умножения, выход которого соединен с вторым входом блока сравнения, выход экстремального селектора соединен с вторым входом блока аналоговой памяти и входом генератора линейно-изменяющегося напряжения, выход которого соединен с вторым входом элемента совпадения, выход задатчика ам5 плитуды соединен с вторым входом блока умножения.
2. УстрО}:ство по п. 1, отличающееся тем, что преобразователь период - напряжение содержит амплитудный детектор, усилитель, интегрирующую цепь и блок фазовой автоподстройки частоты, выход которого через последовательно соединенные интегрирующую цепь, усилитель и амплитудный детектор соединен с выходом преобразователя период - напряжение, вход которого сое- динен с входом блока фазовой автопод- стройки частоты.
фиг.З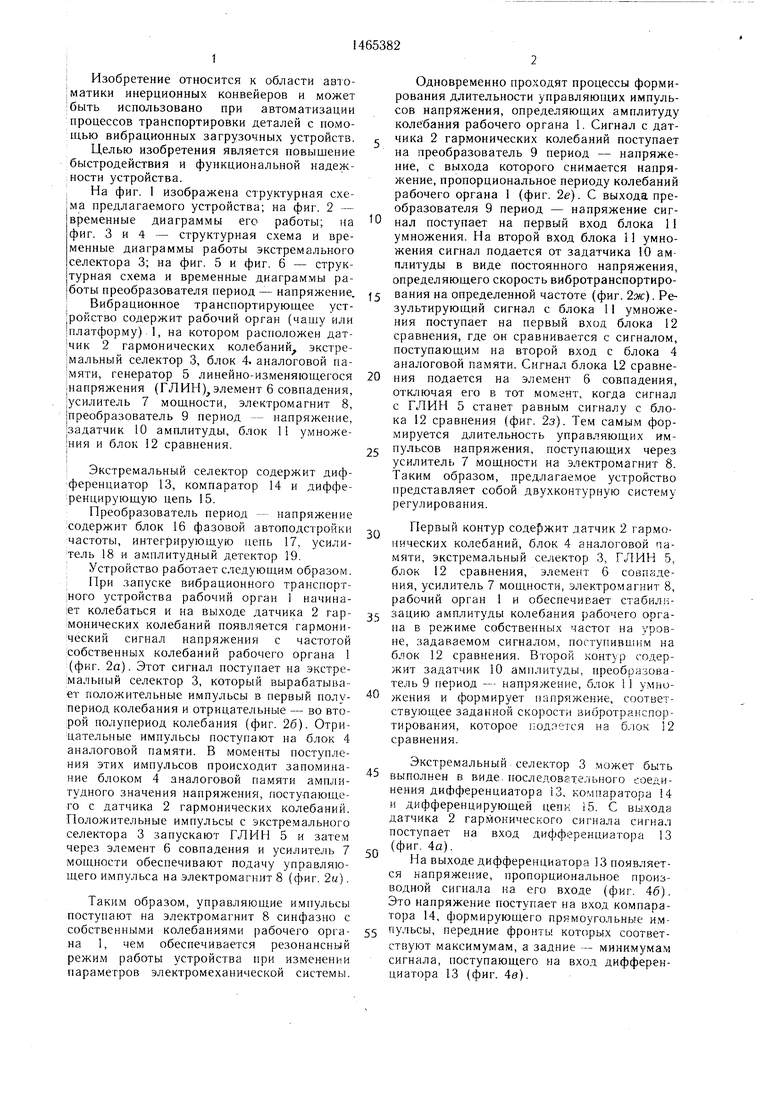

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты колебаний платформы | 1978 |
|
SU752254A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208771C2 |
| Устройство для защиты электропривода глубинного штангового насоса от анормального режима | 1987 |
|
SU1457053A1 |
| Способ определения технического состояния двигателей внутреннего сгорания и устройство для его осуществления | 2018 |
|
RU2721992C1 |
| Спектрометр | 1986 |
|
SU1437688A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Устройство для измерения мощности и герметичности цилиндров двигателля внутреннего сгорания | 1987 |
|
SU1493897A1 |
| Устройство аналого-цифрового преобразования узкополосных сигналов | 1984 |
|
SU1225014A1 |
| Устройство для определения амплитудных и фазовых частотных характеристик и идентичности сейсмических каналов | 1986 |
|
SU1327030A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2541072C2 |
Изобретение относится к области автоматики инерционных конвейеров и позволяет автоматизировать процесс транспортировки деталей с помощью вибрационных загрузочных устройств. Цель изобретения - повышение быстродействия и функциональной надежности. При запуске устройства рабочий орган (РО) 1 начинает колебания и на выходе датчика 2 гармонических колебаний появляется сигнал, поступающий на экстремальный селектор 3, который вырабатывает положительные импуль сы в первый полупериод колебания и отрицательные во второй полупериод колебания. В моменты поступления отрицательных импульсов на блок 4 аналоговой памяти происходит запоминание их амплитудного значения. Положительные импульсы запускают генератор 5 линейно-изменяющегося напряжения и затем через элемент 6 совпадения и усилитель 7 мощности обеспечивают подачу управляющего импульса на закрепленный на РО 1 электромагнит 8. Поступление на электромагнит 8 управляющих импульсов синфазно с собственными колебаниями РО 1 обеспечивает резонансный режим работы устр-ва при изменении параметров электромеханической системы. Длительность управляющих импульсов напряжения, определяющих амплитуду колебания РО 1, формируется контуром управления, образованным преобразователем 9 период- напряжение, задатчиком 10 амплитуды, блоком 11 умножения и блоком 12 сравнения. 1 3. п. ф-лы, 6 ил. i СЛ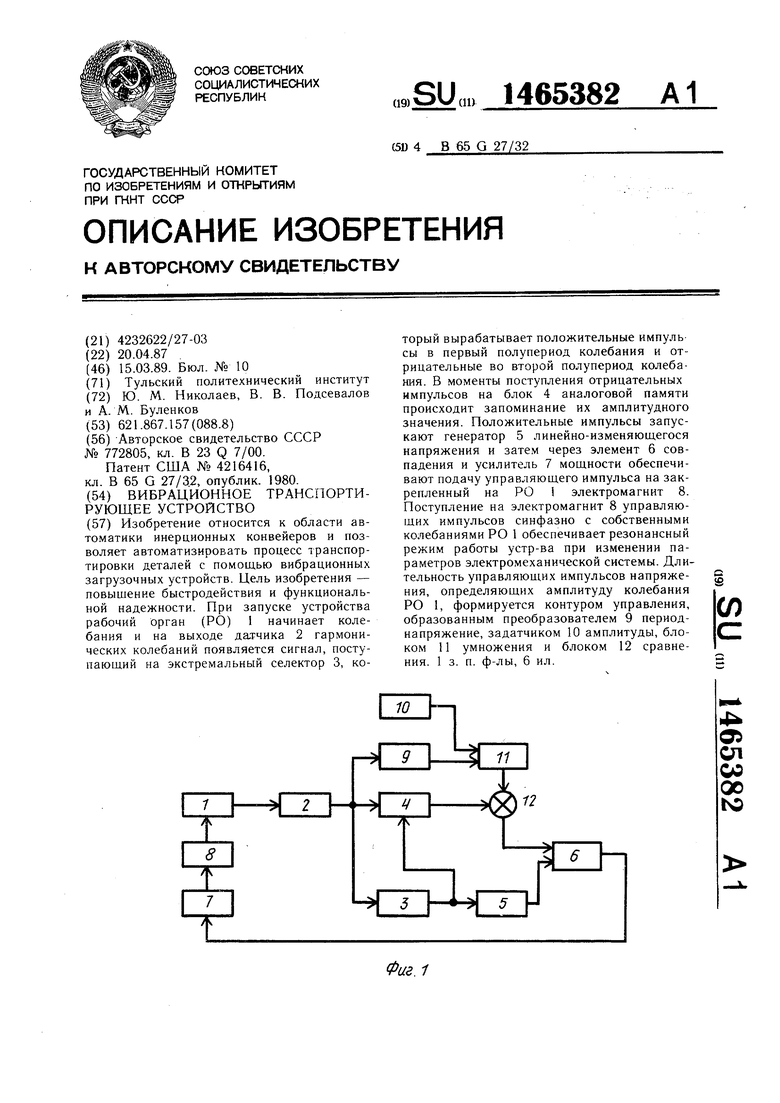
| Электровибрационное устройство к загрузочному бункеру | 1979 |
|
SU772805A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Патент США № 4216416, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
