Предлагаемое изобретение относится к измерительной технике и может быть использовано как датчик скорости для расходомеров жидких и газообразных сред, а также для автоматического контроля вращения, углового перемещения механизмов и машин.
Датчик скорости выполняет также функции датчика индикации и направления вращения и может быть использован для измерения направления движения жидкостей и газов, а также вращений механизмов в замкнутых герметичных объемах аппаратов химической промышленности, ядерных реакторах с высокими температурами и давлениями контролируемой среды.
Например, для работающего ядерного реактора является важным:
- определение направления движения (течения) теплоносителя (воды) в герметичных трубопроводах;
- определение направления движения (вращения) механизмов СУЗ, механизмов перегрузки ядерного топлива.
Любое изменение движения, не предусмотренное режимом работы машин и механизмов, может привести к аварии.
Датчик скорости с индикацией направления вращения может быть применен в различных механизмах и устройствах и в открытой воздушной среде.
Известен преобразователь расхода турбинный (ТПР), выпускаемый Арзамасским приборостроительным заводом (см. техническое описание и инструкцию по эксплуатации 4Е2.833.031ТУ. Преобразователь зарегистрирован в Госреестре средств измерения под №8326-90. Сертификат № 13421).
Преобразователь расхода турбинный ТПР предназначен для выдачи информации об объемном расходе измеряемой жидкости в виде частотного электрического сигнала синусоидальной формы при наземных (стендовых) испытаниях изделий.
Частота измерения выходного сигнала при вращении чувствительного элемента (турбинки), помещенного в поток измеряемой жидкости:
на верхнем пределе измерения - 500±50 Гц;
на нижнем пределе измерения - 10 Гц.
Преобразователь расхода ТПР, являющийся по существу датчиком скорости, состоит из немагнитного корпуса, турбинки с ферромагнитными лопастями, магнитоиндукционного генератора МИГ, имеющего немагнитный кожух, в котором установлена магнитоиндукционная катушка с ферромагнитным сердечником и с постоянным магнитом, закрепленным на сердечнике.
Магнитоиндукционный генератор установлен жестко в паз корпуса преобразователя расхода ТПР.
Недостатком преобразователя расхода ТПР является получение слабого по величине электрического сигнала, возникающего в индукционной катушке при вращении турбинки.
Причиной такого слабого сигнала является слабый рабочий магнитный поток, возникающий между ферромагнитным сердечником индукционной катушки и подвижной ферромагнитной лопастью при вращении турбинки.
Известно, что такой рабочий магнитный поток между ферромагнитным сердечником и ферромагнитной лопастью преобразователя расхода ТПР составляет порядка 5÷7% от полного магнитного потока в пространстве вокруг индукционной катушки. Остальной поток, создаваемый индукционной катушкой, является потоком рассеяния и составляет >90% полного магнитного потока (см. Бессонов, «Теоретические основы электротехники», А.Г.Гордон, А.Г.Сливинская, «Электромагниты постоянного тока», ГЭИ, Москва, 1960, с.80).
Для увеличения рабочего магнитного потока и полезного электрического сигнала в конструкции ТПР увеличены размеры и масса индукционной катушки и ферромагнитного сердечника генератора МИГ, которые соизмеримы с размерами корпуса и чувствительного элемента - турбинки.
Это является недостатком, так как при такой конструкции невозможно разместить по окружности корпуса ТПР больше двух или трех генераторов МИГ, что ограничивает величину полезного электрического сигнала скорости двумя или тремя электрическими импульсами за один оборот вала турбинки. Следовательно, при измерениях скоростей по электрическим схемам с применением преобразователя частоты (ПЧ-6 или ПЧ-1) невозможно измерение малых скоростей вращения турбинки - менее 200÷300 оборотов в минуту и применять преобразователь ТПР для измерения скоростей вращения ниже 200÷300 оборотов в минуту, что также является недостатком преобразователя ТПР.
Известно устройство для измерения скорости вращения по авторскому свидетельству SU № 457031, кл. G01P 3/48.
Устройство по а.с. № 457031 содержит на валу машины три разновидных магнитных вставки, которые при вращении вала проходят по окружности статора с зазором мимо датчика генераторного типа, состоящего из ферромагнитного сердечника с двумя индукционными катушками и жестко установленного на статоре машины.
Три разновысотные магнитные вставки создают при прохождении ферромагнитного сердечника различные по величине зазоры и генерируют при этом электрические сигналы в индукционных катушках с тремя различными амплитудами A1, A2, А3.
Различные по величине зазоры, образуемые прохождением магнитных вставок ферромагнитного сердечника, позволяют определять направление вращения вала по часовой стрелке, например, по сигналам осциллографа, подключенного к индукционным катушкам.
Недостатком устройства по а.с. №457031 является низкая величина электрических сигналов, которая уменьшается по амплитуде А2 и А3 с увеличением зазоров у второго и третьего магнитов и определяется преобладающим окружающим индукционные катушки магнитным полем рассеяния, создаваемым наводящим электрическим сигналом.
Наиболее близким к заявляемому устройству является датчик скорости по авторскому свидетельству SU 1525581 А1, от 30.11.89, кл. G01P 3/48, G01F 1/075, который выбран за прототип.
Датчик скорости содержит немагнитный цилиндрический корпус, в котором установлен чувствительный элемент, выполненный в виде ферромагнитных лопастей турбинки, первичные индуктивные катушки, расположенные на корпусе по обе стороны от вторичных (измерительных) индуктивных катушек, установленные равномерно на диаметре корпуса, в зоне вращения ферромагнитных лопастей турбинки.
Известный датчик скорости измеряет скорость потока жидкости или газа в герметичном трубопроводе путем счета импульсов тока, выдаваемых вторичными катушками, при прохождении ферромагнитными лопастями турбинки зоны действия электромагнитного поля, создаваемого этими катушками.
Электромагнитное поле во вторичных катушках датчика скорости создается путем трансформаторного эффекта передачи энергии от первичных катушек, установленных на корпусе датчика.
Так как передача энергии от первичных измерительных обмоток ко вторичным происходит при отсутствии в конструкции ферромагнитного магнитопровода, то потери энергии достаточно велики из-за создания обмотками внешнего электромагнитного поля рассеяния. Велики потери и на вихревые токи, возникающие в немагнитном стальном корпусе датчика скорости.
Потери на вихревые токи и на создание внешнего электромагнитного поля рассеяния приводят к необходимости дополнительного увеличения электрической мощности датчика скорости, а также к низкой точности счета импульсов вращения лопастей турбинки. Это является существенным недостатком датчика, приводит к дополнительным затратам материала и, соответственно, к увеличению размеров и стоимости. Отсутствие в конструкции датчика скорости ферромагнитного магнитопровода для индуктивных измерительных катушек приводит к возникновению в катушках слабовыраженного расплывчатого полезного сигнала-импульса при прохождении ферромагнитной вращающейся лопастью зоны действия электромагнитного поля измерительной катушки, что снижает чувствительность и точность счета импульсов прохождения лопастей через зону электромагнитного поля измерительной обмотки, снижает точность измерений датчика скорости.
В конструкции датчика скорости применяются два типа индуктивных катушек: первичные и вторичные, что усложняет их изготовление и размещение на корпусе и является недостатком прототипа.
Также недостатком является ограниченность числа электрических сигналов четырех секций измерительной (вторичной) обмотки, что ограничивает нижний предел измерения скорости. Так, например, за один оборот вала двух или четырех лопастей турбинки датчик скорости вырабатывает только четыре импульса изменяющегося по амплитуде напряжения во вторичной обмотке.
При низких скоростях вращения турбинки начальный порог счета импульсов, а также чувствительность датчика определяются способностью индуктивных измерительных катушек датчика создавать полезное электромагнитное поле и явно выраженный импульс счета лопасти, проходящей через катушки, и определяются большим числом этих импульсов за один оборот турбинки. Чем больше импульсов за один оборот, тем больше чувствительность датчика и ниже порог минимального счета импульсов диапазона измерения датчика, регистрируемых преобразователем частоты, например, типа ПЧ-6, который имеет свой собственный нижний предел измерения частоты, равный 10 Гц.
Технической задачей предлагаемого изобретения является создание датчика скорости, позволяющего повысить чувствительность датчика за счет приближения полюсов катушек индуктивности к чувствительным элементам, уменьшения магнитного поля рассеивания и потерь на вихревые токи.
Решение поставленной задачи обеспечивает повышение точности и надежности измерений, а также упрощение конструкции датчика за счет исключения вторичных катушек.
Техническая задача решается тем, что на поверхности корпуса датчика скорости, в котором установлен с возможностью взаимодействия с контролируемым потоком чувствительный элемент в виде вращающихся ферромагнитных лопастей, расположенных под углом к оси чувствительного элемента, индуктивные катушки, предназначенные для съема сигнала и расположенные на корпусе, по окружности выполнены пазы, в которые установлены индуктивные катушки, снабженные магнитопроводом, полюса которого развернуты относительно оси чувствительного элемента на угол, равный углу расположения ферромагнитных лопастей, причем необходимо выполнение соотношения:
где D - внутренний диаметр корпуса,
d - размер (диаметр) паза,
е - расстояние между пазами по окружности D,
m - число лопастей чувствительного элемента,
n - число индуктивных катушек.
Кроме того, последний паз расположен относительно предыдущего паза на расстоянии не менее 2е, а относительно границы сектора на расстоянии не менее ближе 3е.
Установка индуктивных катушек на магнитопроводах, например, П-образных в пазах корпуса позволяет максимально приблизить полюса магнитопроводов катушки к чувствительным элементам - подвижным ферромагнитным лопастям, что приводит к повышению точности и надежности измерений скорости и числа оборотов.
Расположение последнего паза относительно предыдущего на расстоянии, отличающемся от расстояния между остальными пазами, позволяет проводить индикацию направления вращения ферромагнитных лопастей.
Малая толщина дна паза (мембраны h) создает при работе малые магнитные поля рассеяния, что увеличивает величину полезного сигнала - импульса тока в катушке при прохождении ферромагнитной лопасти через зону S действия электромагнитного поля П-образного магнитопровода. Малая толщина мембраны h имеет малые потери на вихревые токи. Вихревые токи, возникающие в тонкой мембране, не превышают 3÷4% полезного сигнала (тока в катушке).
Малый диаметр паза (d<<D) позволяет применять их в конструкциях, рассчитанных на высокое давление и температуру. Тонкие мембраны (h=1,5 мм), выдерживают давление измеряемой жидкости (воды) до Р=20 МПа при температуре до Т=300°С.
Сущность технического решения поясняется чертежами, где
на фиг.1 показан общий вид датчика скорости,
на фиг.2 показан разрез А-А фиг.1 (вариант 1),
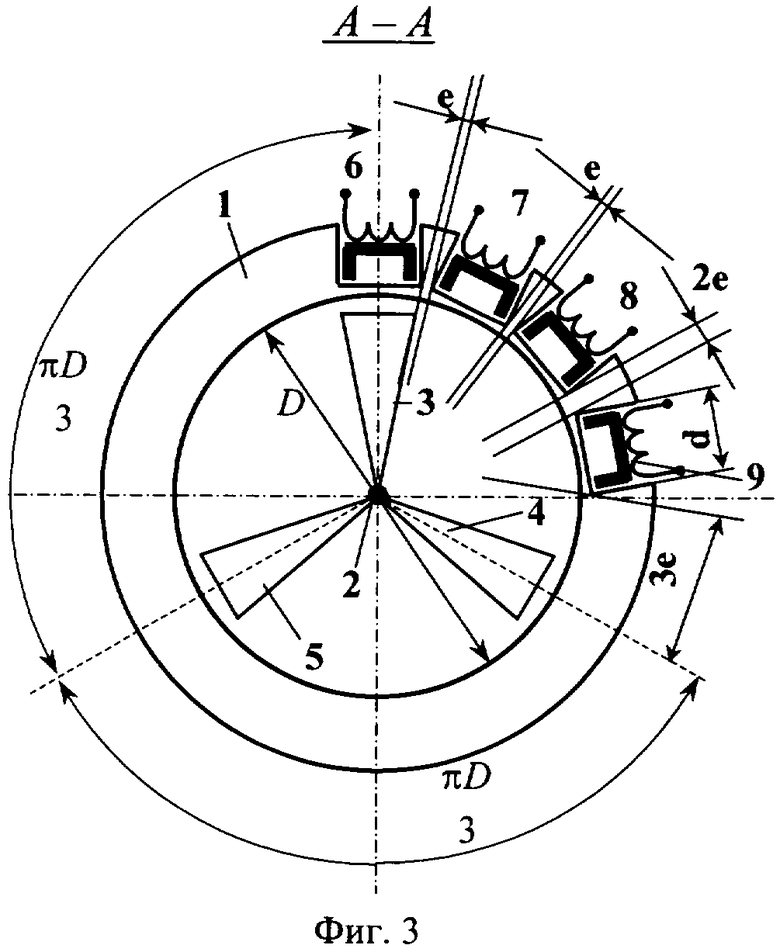
на фиг.3 показан разрез А-А фиг.1 (вариант 2),
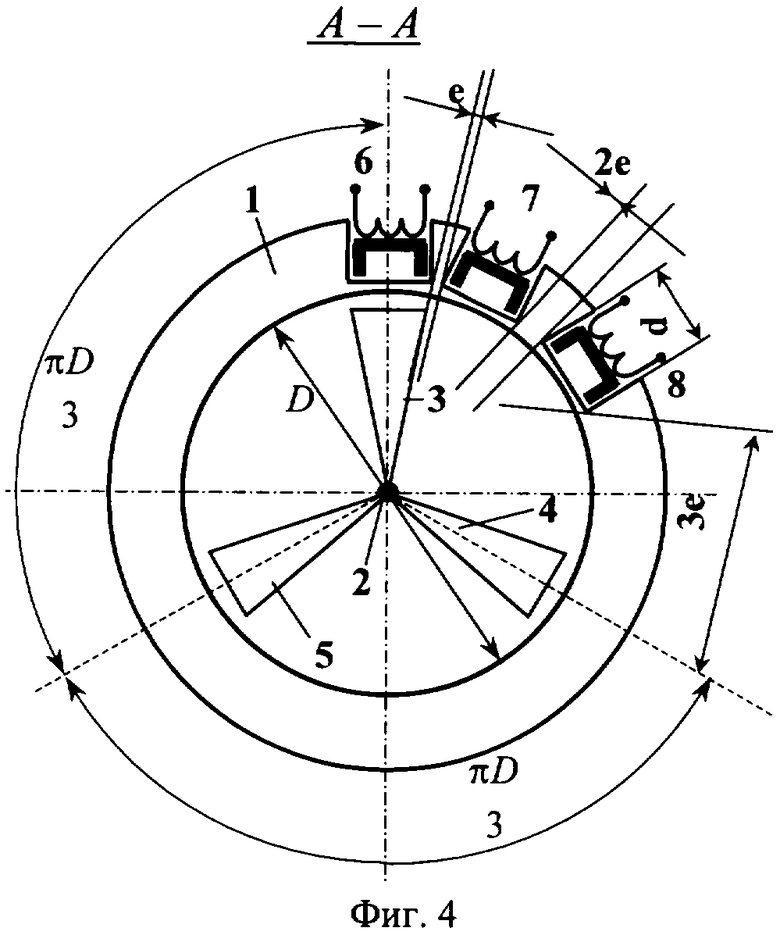
на фиг.4. показан разрез А-А фиг.1 (вариант 3),
на фиг.5 показан график сигналов импульсов тока по варианту 1,
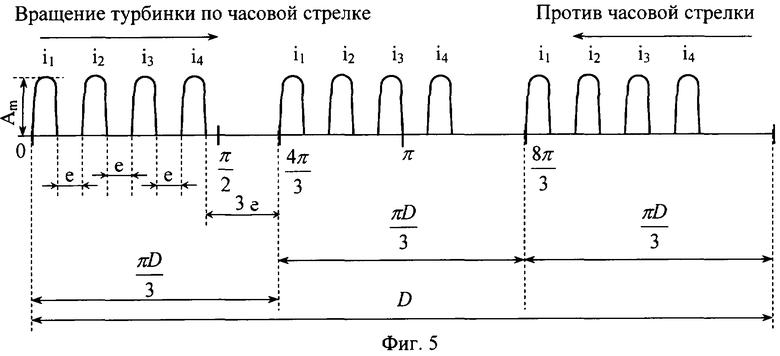
на фиг.6 показан график сигналов импульсов тока по варианту 2,
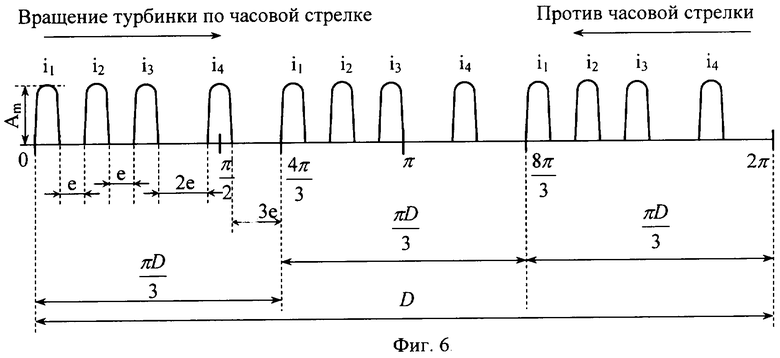
на фиг.7 показан график сигналов импульсов тока по варианту 3.
Датчик скорости состоит из корпуса 1, выполненного из немагнитного материала, чувствительного элемента, выполненного в виде турбинки, на оси 2 которой жестко установлены три ферромагнитных лопасти 3, 4, 5, четырех индуктивных катушек 6, 7, 8, 9 с П-образным магнитопроводом, установленных в пазы корпуса 1. Корпус 1 имеет внутренний диаметр D и толщину стенки H.
Три ферромагнитные лопасти 3, 4, 5 расположены под углом 120° относительно друг друга и развернуты на угол α относительно оси 2.
Пазы выполнены на поверхности корпуса 1 по окружности и имеют глубину Н-h, где h - толщина дна паза (мембраны) и размер d (диаметр).
Индуктивные катушки 6, 7, 8, 9 установлены в пазах в пределах одного сектора, дуга которого равна  . Возможно расположение индуктивных катушек и в других секторах. При размещение пазов по поверхности корпуса должно выполняться соотношение
. Возможно расположение индуктивных катушек и в других секторах. При размещение пазов по поверхности корпуса должно выполняться соотношение 
Полюса каждого П-образного магнитопровода направлены в сторону вращения лопастей и развернуты на угол α по отношению к оси 2 турбинки.
Между торцевой плоскостью П-образного магнитопровода и ферромагнитной лопастью образована зона S действия электромагнитного поля Ф. Зона S действия электромагнитного поля больше толщины мембраны и воздушного зазора S>h, размеры зоны S определены конструкцией П-образного магнитопровода и ферромагнитной лопасти.
Для эффективной работы датчика скорости должно выполняться соотношение S:d.
В предлагаемом датчике может быть применено различное число индуктивных катушек, например на поверхности корпуса выполнено 4 паза и установлено 4 индуктивные катушки 6, 7, 8, 9 (вариант 1). Для этого пазы 4 разнесены между собой по поверхности корпуса 1. Минимальная величина дуги е между пазами выбрана из условия, позволяющего исключить влияние электромагнитных потоков Ф˜П-образных магнитопроводов друг на друга и дополнительных помех. Конструктивная величина е соответствует временному интервалу получения импульсов тока и выбрана в зависимости от диаметра D корпуса 1.
Возможны другие варианты, например три паза выполнены аналогично варианту 1, а четвертый паз удален на расстояние 2е (вариант 2). По варианту 3 выполнено три паза и установлено три индуктивные катушки, а пазы разнесены по поверхности корпуса в сочетании варианта 1 и варианта 2 таким образом, что два паза выполнены аналогично варианту 1, а третий удален на расстояние 2е.
Может быть выбран и любой другой вариант, удовлетворяющий отношению:
В предлагаемом датчике скорости может быть применено и различное число лопастей турбинки.
Принцип действия предлагаемого датчика скорости основан на счете числа импульсов N, вырабатываемых датчиком за один оборот вала турбинки:
N=n×m.
Чем больше число импульсов за один оборот, тем больше чувствительность, выше точность измерений, ниже граница (или уровень) минимального счета импульсов и шире диапазон измерений датчика.
Однако увеличение числа лопастей m приводит к усложнению конструкции, технологии изготовления и увеличению вибраций при работе; уменьшение числа лопастей - к снижению точности измерений, а увеличение числа индуктивных катушек ограничено конструктивными размерами паза и индуктивной катушки.
Увеличение расстояния между последним пазом и предыдущим до 2е позволяет определить направление вращения. Возникает возможность различать на регистрирующем приборе (например, осциллографе) разный порядок считывания импульсов i и пауз, соответствующих величине е.
Расположение последнего паза по отношению к границе сектора на расстоянии не менее 3е позволяет установить порядок прохождения и направление вращения лопастей, то есть видеть, что одна лопасть вышла из зоны действия магнитного поля последней катушки, а другая еще не вошла.
Датчик скорости работает следующим образом.
Корпус 1 датчика скорости установлен в контролируемом потоке воды или газа. Индуктивные катушки 6, 7, 8, 9 получают питание от источника напряжения и подключены к прибору, регистрирующему сигналы, например осциллографу.
Под действием контролируемого потока происходит вращение ферромагнитных лопасти 3, 4, 5. При вращении оси 2 турбинки по часовой стрелке и прохождении каждой ферромагнитной лопасти 3, 4, 5 поочередно через зону S действия магнитных потоков Ф˜, создаваемых индуктивными катушками 6, 7, 8, 9 с магнитопроводами, в каждой индуктивной катушке изменяется ее индуктивное сопротивление, что приводит к изменению электрического тока в катушке и возникновению электрического сигнала, регистрируемого прибором.
Импульсы тока i1, i2, i3 и i4 выдаются соответственно индуктивными катушками 6, 7, 8 и 9. Временная пауза между импульсами i1, i2, i3 и i4 соответствует величине е, таким образом за один оборот оси 2 турбинки датчик скорости выдает 12 импульсов тока с одинаковой амплитудой Am.
При вращении чувствительного элемента и при прохождении каждой ферромагнитной лопасти 3, 4, 5 мимо каждой индуктивной катушки 6, 7, 8, 9 возникает изменение индуктивности в соответствующей катушке. Изменение индуктивного сопротивления катушки приводит к разбалансу напряжения на выходе измерительного моста, которое в виде импульса регистрируется аппаратурой. Частота выдаваемых импульсов соответствует заданной скорости вращения чувствительного элемента датчика - турбинки. Разным скоростям вращения турбинки соответствуют полученные на осциллограмме частоты импульсов тока от индуктивных катушек. По полученным данным строится градуировочная характеристика.
Выполнение датчика в соответствие с предлагаемым изобретением позволяет повысить чувствительность датчика, точность и надежность измерений. Предлагаемая конструкция датчика расширяет диапазон измерения в сторону малых скоростей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК СКОРОСТИ | 2012 |
|
RU2521716C2 |
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| Индуктивный датчик тахометрического счетчика жидкости | 2016 |
|
RU2625539C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ДАТЧИК СКОРОСТИ ПОТОКА ТЕКУЧЕЙ СРЕДЫ | 1992 |
|
RU2037827C1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| Датчик массового расхода | 1982 |
|
SU1167433A1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2219540C1 |
| Датчик скорости вращения вала | 1979 |
|
SU838558A1 |
Изобретение относится к измерительной технике и может быть использовано как датчик скорости для расходомеров жидких и газообразных сред, а также для автоматического контроля вращения, углового перемещения механизмов и машин. Датчик скорости содержит корпус, в котором установлен с возможностью взаимодействия с контролируемым потоком чувствительный элемент в виде вращающихся ферромагнитных лопастей, расположенных под углом к оси чувствительного элемента, индуктивные катушки, предназначенные для съема сигнала и расположенные на корпусе. На поверхности корпуса по окружности выполнены пазы, в которые установлены индуктивные катушки, снабженные магнитопроводом, полюса которого развернуты относительно оси чувствительного элемента на угол, равный углу расположения ферромагнитных лопастей, причем необходимо выполнение соотношения:
 ,
,
где D - внутренний диаметр корпуса, d - размер (диаметр) паза, е - расстояние между пазами по окружности D, m - число лопастей чувствительного элемента, n - число индуктивных катушек. Кроме того, последний паз расположен относительно предыдущего паза на расстоянии не менее 2е, а относительно границы сектора на расстоянии не менее 3е. Технический результат: повышение точности и надежности измерений, упрощение конструкции датчика за счет исключения вторичных катушек. 1 з.п. ф-лы, 7 ил.
где: D - внутренний диаметр корпуса;
d - размер (диаметр) паза;
е - расстояние между пазами по окружности D;
m - число лопастей чувствительного элемента;
n - число индуктивных катушек.
| Датчик скорости | 1985 |
|
SU1525581A1 |
| Датчик угловой скорости вращения вала | 1976 |
|
SU607144A1 |
| JP 53036281 A, 04.04.1978 | |||
| JP 60050453 А, 20.03.1985. | |||

