Изобретение относится к области электроэнергетики, в частности к автоматизированным системам управления и диагностики трансформаторного оборудования электрических станций и подстанций.
В промышленных системах управления старого поколения для отображения оператору информации об угловом положении механизмов использовались сельсинные датчики и указатели (система «гибкого вала»). Примером может служить сельсинный указатель положения переключателя ответвлений регулируемых под нагрузкой силовых трансформаторов (РПН). Описание сельсинной передачи приведено, например, в книге Ж.Жиль, М.Пелегрен, П.Декольн. Теория и техника следящих систем. М.: МАШГИЗ, 1961.
Такая система имеет тот недостаток, что способ передачи информации о положении ротора датчика (положение стрелки указателя) не позволяет непосредственно ввести эту информацию в автоматизированную систему управления и контроля за технологическим процессом (АСУТП).
Известны устройства, позволяющие преобразовать информацию об угловом положении вала сельсина в сигнал, пригодный для ввода в АСУТП. Например, такие решения описаны в патентах US 4994799 G08C 19/48, SU 1247647 G01B 7/30, RU 2161772 G01B 7/30, G08C 19/48.
Наиболее близкое к предлагаемому изобретению устройство описано в патенте RU 2161772 G01B 7/30, G08C 19/48 (прототип).
В этом устройстве три фазных выхода сельсина-датчика соединены с входами устройства преобразования информационных сигналов, содержащего синхронный демодулятор на входе, три перемножителя, обеспечивающие перемножение сигналов на выходах синхронного демодулятора с выходными сигналами трехфазного генератора опорных напряжений. Сумма произведений, получаемых на выходе сумматора, преобразуется в электрический сигнал напряжения, пригодный для индикации.
Недостатком данного устройства, как и других аналогичных решений, является то, что выходная информация получается в виде аналогового сигнала и для ввода его в АСУТП требуется дополнительное аналого-цифровое преобразование. В итоге полная схема преобразования получается сложной и содержит много источников погрешностей в аналоговой части (в частности - аналоговые перемножители). Кроме того, выходной сигнал получается в виде широтно-модулированной последовательности импульсов, и для дальнейшего использования в виде сигнала постоянного тока требуется дополнительная фильтрация этого сигнала, что снижает быстродействие устройства.
Целью данного изобретения является создание устройства, извлекающего информацию об угловом положении ротора сельсина-датчика по значениям электрических сигналов на его выводах и преобразующего эту информацию непосредственно в цифровую форму для ввода ее в АСУТП без усложнения устройства и без снижения его быстродействия, а также с достаточной степенью точности.
Поставленная цель достигается периодической фиксацией в один и тот же момент времени трех мгновенных значений напряжений на выводах обмоток ротора датчика, преобразованием этих значений в цифровую форму и вычислением углового положения ротора ϕ с использованием приведенных ниже соотношений (1)...(3).
Для этого в преобразователе угла поворота вала в электрический информационный сигнал, содержащем сельсин-датчик и подключенное к его фазным выводам устройство преобразования информационных сигналов, последнее выполнено с использованием трех узлов нормализации и фильтрации на входе, узла синхронизации с токовым входом и импульсным выходом, аналогового мультиплексора с тремя аналоговыми входами, адресным входом и аналоговым выходом, аналого-цифрового преобразователя с аналоговым входом и цифровым интерфейсом и микроконтроллера с тремя цифровыми интерфейсами и входом прерывания. При этом аналоговые входы мультиплексора подключены к соответствующим фазным обмоткам сельсина-датчика через узлы нормализации и фильтрации, его выход подключен к аналоговому входу аналого-цифрового преобразователя, а цифровой интерфейс последнего и адресный вход мультиплексора подключены к соответствующим цифровым интерфейсам микроконтроллера. Токовый вход узла синхронизации включен последовательно в цепь обмотки возбуждения сельсина-датчика, а его импульсный выход подключен к входу прерывания микроконтроллера.
Для повышения точности в устройство преобразования информационных сигналов вводится три узла слежения и запоминания каждый с аналоговыми входом и выходом и управляющим входом, включенные между выходами узлов нормализации и фильтрации и аналоговыми входами мультиплексора. При этом микроконтроллер имеет дискретный выход, подключенный к управляющим входам всех узлов слежения и запоминания.
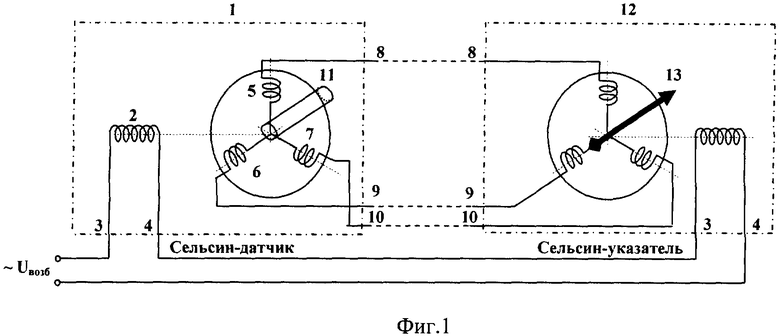
Для пояснения существа изобретения на фиг.1 приведена схема сельсинной системы «гибкого вала»;
на фиг.2 - блок схема устройства преобразования сигналов сельсина в цифровую форму согласно изобретению;
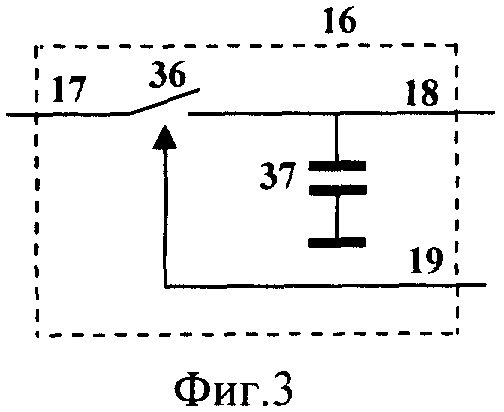
на фиг.3 показана реализация узла слежения-запоминания;
на фиг.4 показан пример реализации узла синхронизации;
на фиг.5 приведена схема устройства преобразования сигналов сельсина в цифровую форму без узлов слежения-запоминания.
Преобразователь содержит сельсин-датчик 1, представляющий собой заторможенную электрическую машину с однофазной обмоткой возбуждения 2 на статоре с выводами 3 и 4 и трехфазной обмоткой 5, 6, 7 на роторе (выводы 8, 9, 10).
При использовании сельсина 1 в качестве датчика его ротор жестко соединен с валом 11, угловое положение которого относительно статора следует определить.
К выводам сельсина-датчика 1 подключено устройство преобразования информации (УПИ) 14, которое содержит три идентичных узла нормализации и фильтрации (УНФ) 15, подключенных к соответствующим выходам (8, 9, 10) трехфазной обмотки ротора; три узла слежения и запоминания (УСЗ) 16, каждый из которых имеет аналоговый вход 17, связанный с выходом соответствующего узла 15, выход 18 и управляющий вход 19; узел синхронизации 20 с токовым входом 21, включенным последовательно в цепь обмотки возбуждения сельсина-датчика, и выходом 22; аналоговый мультиплексор 23 с аналоговыми входами 24, 25 и 26, подключенными соответственно к выходам 18 узлов слежения и запоминания 16, адресным входом 27 и выходом 28; аналого-цифровой преобразователь 29, подключенный к выходу 28 мультиплексора 23; микроконтроллер 30, имеющий цифровые интерфейсы 31 (I1), 32 (I2) и 33 (I3), дискретный выход 34 (D) и вход прерывания 35 (INT).
Управляющие входы 19 узлов слежения и запоминания 16 подключены к дискретному выходу 34 микроконтроллера. Выход 22 узла синхронизации 20 подключен к входу прерывания 35 микроконтроллера 30. Адресный вход 27 мультиплексора 23 подключен к выходу интерфейса 32 микроконтроллера 30. АЦП 29 подключен к интерфейсу 31 микроконтроллера. Интерфейс 33 микроконтроллера, например последовательный канал связи, используется для дистанционной передачи данных в компьютер АСУТП.
Узел нормализации и фильтрации 15 обеспечивает согласование уровня входного сигнала, поступающего с обмотки ротора сельсина, с требуемым уровнем входного сигнала АЦП, и фильтрацию высокочастотных помех во входном сигнале. В простейшем случае УНФ представляет собой резистивный делитель, нижнее плечо которого зашунтировано фильтрующим конденсатором.
На фиг.3 показан пример схемной реализации узла слежения и запоминания 16. Узел содержит аналоговый ключ 36, два вывода которого являются входом 17 и выходом 18 УСЗ, а управляющий вход ключа - управляющим входом УСЗ. На выход подключен также заземленный запоминающий конденсатор 37.
На фиг.4 приведен один из вариантов реализации узла синхронизации 20. Токовый вход 21 узла представляет собой первичную обмотку трансформатора тока 38, вторичная обмотка которого нагружена на сопротивление 39.
Сельсинная система «гибкого вала» (фиг.1) представляет собой два соединенных между собой электрически сельсина - датчик 1 и указатель 12. Одноименные выводы обмоток роторов (8, 9, 10) датчика и указателя соединены между собой, а обмотки возбуждения соединены последовательно. Возможно и параллельное соединение обмоток возбуждения. Ротор сельсина-указателя свободно вращается, и с ним жестко соединена стрелка указателя 13.
В силу симметрии двух синхронных машин - датчика и указателя - ротор указателя займет такое положение, при котором наводимые на обмотках его ротора э.д.с. будут уравновешивать э.д.с. соответствующих обмоток ротора датчика. Это имеет место при одинаковых угловых положениях роторов двух машин относительно их статоров (положение равновесия). При отклонении ротора указателя от такого положения разность э.д.с. в обмотках роторов вызывает протекание в обмотках токов, и создаваемый этими токами магнитный поток ротора приводит к появлению вращающего момента, который возвращает ротор указателя в положение равновесия. Положение стрелки относительно статора сельсина-указателя дистанционно передает оператору информацию о положении ротора датчика относительно его статора.
Синусоидальный переменный ток, подаваемый в обмотку возбуждения 2, создает в машине переменное магнитное поле, поток которого направлен по оси этой обмотки. Этот поток наводит в обмотках ротора 5, 6, 7 синусоидальные э.д.с. U5, U6, U7, фазы которых совпадают, а амплитуды зависят от углового положения осей трех обмоток относительно оси обмотки возбуждения:



Здесь ϕ - угол поворота оси обмотки 5 ротора относительно оси обмотки возбуждения,
Em - максимальная амплитуда э.д.с. при совпадении осей обмоток, определяемая конструкцией сельсинов и величиной тока в обмотке возбуждения,
ω - угловая частота напряжения (тока) возбуждения.
Раскрывая в формулах (2) и (3) косинусы суммы и разности углов, получим


С учетом (2a), (3а) найдем амплитуды двух разностных напряжений:


Подставив в (4) в соответствии с (5) (U7-U6) вместо  получим
получим

В результате деления (5) на (6) найдем соотношение для определения угла поворота ротора:

Выражение (7) позволяет определить главное значение угла ϕ (т.е. с точностью до ±180°). Для того чтобы напряжения фиксировались вблизи их максимума, можно осуществлять измерения в момент, определяемый переходом через нуль в положительном направлении тока возбуждения в статорной обмотке. В этом случае с учетом полярности измеренных напряжений можно восстановить истинное значение угла.
Заметим, что в правую часть выражения (7) входит только отношение напряжений. Это позволяет иметь относительно невысокую точность реализации масштабного коэффициента измерений. Важно лишь, чтобы он был одинаков для всех трех напряжений.
Устройство 14 преобразования импульсных сигналов (фиг.2) работает следующим образом.
- В исходном состоянии сигнал на дискретном выходе 34 микроконтроллера имеет значение «1» и все три узла слежения и запоминания 16 отслеживают свои входные сигналы.
- В момент перехода через ноль в положительном направлении тока на входе 21 узла синхронизации 20 (ток возбуждения сельсина) на выходе 22 этого узла формируется импульсный сигнал, поступающий на вход прерывания 35 микроконтроллера 30. Программа обработки прерывания в контроллере меняет значение сигнала на выходе 34 микроконтроллера на «0», и три УСЗ 16 запоминают значения напряжений обмоток ротора сельсина в этот момент времени.
- Микроконтроллер по интерфейсу 32 выдает адрес первого входа на адресный вход 27 мультиплексора 23, по интерфейсу 31 выдает команду АЦП 29 на начало преобразования и считывает результат преобразования, соответствующий зафиксированному напряжению на выводе 8 обмотки ротора сельсина.
- Предыдущая операция повторяется для двух других адресов мультиплексора и с АЦП 29 считываются данные, соответствующие напряжениям на выводах 9 и 10 обмоток ротора сельсина.
- На выход 34 микроконтроллера вновь выдается логический уровень «1», разрешая слежение за мгновенными значениями входных напряжений в УСЗ 16.
- По соотношению (7) вычисляется искомое значение угла поворота ротора сельсина-датчика 1.
- По запросу удаленного компьютера по интерфейсу 33 вычисленное значение передается в этот компьютер.
В случае выполнения узлов слежения и запоминания по схеме фиг.3 при логическом уровне «1» на управляющем входе 19 ключ 36 замкнут, напряжение на конденсаторе 37 и на выходе 18 равно напряжению на входе 17. При изменении логического уровня на управляющем входе 19 с «1» на «0» ключ 36 размыкается, и на конденсаторе 37 сохраняется напряжение, соответствующее значению напряжения на входе 17 в момент размыкания ключа.
В случае реализации узла синхронизации 20 по фиг.4 напряжение, выделяемое на сопротивлении 39 при протекании тока в трансформаторе тока 38, поступает на компаратор 40. На выходе компаратора, который служит выходом 22 узла 20, формируется импульсный сигнал, имеющий значение «1» при положительном направлении входного тока и значение «0» при отрицательном.
В ряде применений угловое положение требуется определять с небольшой точностью. Так, для определения номера положения РПН, имеющих максимально 45 положений (обычно - не более 23), дискретность изменения углового положения не превышает 8°, т.е. достаточно иметь погрешность определения угла в пределах ±4°. В предложенном устройстве измерение мгновенных значений синфазных синусоидальных напряжений на обмотках ротора сельсина осуществляется в районе их амплитуды, где скорость их изменения невелика. Если суммарное время оцифровки напряжений не превышает 4° (при частоте сети 50 Гц это время составит 220 мкс, что с большим запасом обеспечивается современными АЦП), можно пренебречь изменениями напряжений за это время. Это позволяет упростить схему, отказавшись от узлов слежения и запоминания. Такой вариант схемы устройства показан на фиг.5. В этой схеме входы 24, 25, 26 мультиплексора 23 непосредственно подключены к выводам обмоток ротора сельсина 8, 9, 10 через узлы нормализации и фильтрации 15. Устройство работает так же, как описано выше, за исключением операций управления слежением/запоминанием сигналов.
Для повышения точности измерений в предлагаемом устройстве можно осуществлять автоматическую калибровку нуля. Для этого в мультиплексоре используется четвертый аналоговый вход 41 (фиг.5), подключенный к точке с нулевым потенциалом (общая точка питания). Микроконтроллер в каждом цикле измерений осуществляет измерение нулевого потенциала и вычитает полученное значение из результатов измерения напряжений обмоток ротора сельсина.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА СОСТОЯНИЯ ВЫСОКОВОЛЬТНЫХ ВВОДОВ | 2009 |
|
RU2401434C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ВЫСОКОВОЛЬТНЫХ ВВОДОВ | 2011 |
|
RU2452973C1 |
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ГАЛЬВАНИЧЕСКИХ ВАНН | 1998 |
|
RU2135647C1 |
| МИКРОПРОЦЕССОРНЫЙ БЛОК УПРАВЛЕНИЯ ВЫПРЯМИТЕЛЬНО-ИНВЕРТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ БУВИП(М) | 2002 |
|
RU2251785C2 |
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОГЛОЩАЮЩЕГО СТЕРЖНЯ В АКТИВНОЙ ЗОНЕ РЕАКТОРА | 2013 |
|
RU2540441C2 |
| Многоканальный электрический преобразователь для весов | 1984 |
|
SU1281917A1 |
| Устройство фильтрации и выделения первой гармоники в микропроцессорных устройствах релейной защиты фидеров контактной сети на основе схем ФАПЧ | 2018 |
|
RU2708684C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2013 |
|
RU2537514C1 |
| СПОСОБ ИМИТАЦИИ ХОДЬБЫ И БЕГА ЧЕЛОВЕКА ДЛЯ РЕАБИЛИТАЦИИ БОЛЬНЫХ С РАЗЛИЧНЫМИ ДВИГАТЕЛЬНЫМИ НАРУШЕНИЯМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2082378C1 |
| МНОГОКАНАЛЬНАЯ ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2003 |
|
RU2244945C1 |


Изобретение относится к области электротехники, в частности к автоматизированным системам управления и диагностики трансформаторного оборудования электрических станций и подстанций. Техническим результатом является создание устройства, преобразующего информацию об угловом положении ротора сельсина-датчика в цифровую форму для ввода ее в автоматическую систему управления и контроля за технологическим процессом, без усложнения устройства, без снижения его быстродействия и с достаточной степенью точности. Преобразователь угла поворота вала в электрический информационный сигнал содержит сельсин-датчик и подключенное к его фазным выводам устройство преобразования информационных сигналов. Устройство преобразования снабжено тремя узлами нормализации и фильтрации на входе, узлом синхронизации с токовым входом и импульсным выходом, аналоговым мультиплексором с тремя аналоговыми входами, адресным входом и аналоговым выходом, аналого-цифровым преобразователем с аналоговым входом и цифровым интерфейсом и микроконтроллером с тремя цифровыми интерфейсами и входом прерывания. Соединение упомянутых узлов устройства преобразования выполнено согласно формуле изобретения. Для повышения точности в устройство преобразования информационных сигналов введены три узла слежения и запоминания, включенные между выходами узлов нормализации и фильтрации и аналоговыми входами мультиплексора. 2 з.п. ф-лы, 5 ил.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА | 1995 |
|
RU2161772C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА | 1996 |
|
RU2161773C2 |
| Преобразователь угла поворота вала в напряжение | 1978 |
|
SU750536A1 |
| Преобразователь угла поворота вала в напряжение | 1985 |
|
SU1247647A1 |
| Устройство для ультразвукового контроля изделий | 1987 |
|
SU1585745A1 |
| US 4994799 A, 19.02.1991 | |||
| СПОСОБ УВЕЛИЧЕНИЯ НЕСУЩЕЙ СПОСОБНОСТИ ЛЕДЯНОГО ПОКРОВА | 2016 |
|
RU2622967C1 |
| Способ исследования дробления конструкционных материалов | 1985 |
|
SU1508130A1 |

