Изобретение относится к измерительной технике и может быть использовано для указания положения различных узлов и оборудования на объектах с вредными условиями труда, например для указания положения органов регулирования мощности в активной зоне ядерных реакторов. Функциональное назначение поглощающих стержней (группы стержней), применяемых в реакторной установке, - регулирование мощности реактора, а в случае кризисной ситуации (аварии) его останов.
На АЭС с реакторами РБМК-1000 используется комплексная система контроля, управления и защиты (КСКУЗ), отвечающая за безопасную эксплуатацию ядерной установки. Одним из важных элементов этой системы является сервопривод управления органами регулирования - поглощающий стержень, который состоит из электродвигателя, редуктора, электромагнитной муфты, барабана с металлической лентой, на конце которой закреплен поглощающий стержень. Вал барабана совмещен с понижающим редуктором, который своим вторичным валом соединен с ротором сельсин-датчика (СД). В нижней части канала КСКУЗ расположено гидравлическое тормозное устройство. В этой системе для индикации положения регулирующего стержня используются микромашины переменного тока, обладающие свойством самосинхронизации, называемые сельсинами, которые используются в различных отраслях промышленности (системы автоматики, синхронного и синфазного вращения или повороты двух и более осей и т.д.) и хорошо известны в электротехнической литературе (Брускин Д.Э., Зорохович А.Е. и др. «Электрические машины и микромашины». М.: Высшая школа, 1981 г. 8-я глава, стр.227-249., И.Н. Орлов «Электротехнический справочник, 2 т. Энергоатомиздат, 1986 г., § 26.4 Электрические машины в схемах синхронной связи (сельсины), стр.430-436 и т.д.).
Аналогом предлагаемого изобретения может служить патент на полезную модель RU 52243 «Сервопривод автоматического и ручного управления перемещением поглощающего стержня и аварийной защиты атомного реактора типа РБМК», опубликованный 10.03.2006 г. В представленном аналоге сервопривод автоматического и ручного управления перемещением поглощающего стержня содержит электродвигатель с электромагнитным тормозом (ЭМТ), вал которого через понижающий редуктор связан с электромагнитной муфтой сцепления, имеющей термистор, а через нее и промежуточный редуктор - с валом барабана перемещения стержня, который связан с гидротормозом, состоящим из шестеренчатого насоса и нагрузочного регулирующего дросселя. При этом вал барабана перемещения через предохранительную муфту соединен с редуктором сельсин-датчика (СД) кулачковым механизмом.
Подобными функциональными возможностями обладает (патент на изобретение RU 2244965 авторов: Мартынов Б.Н., Руденко В.М., Скляров Б.И., Татур В.Г. «Исполнительный механизм системы управления и защиты атомных реакторов», опубликованный 20.01.2005 г. и включающий в себя: электродвигатель, силовой редуктор, барабан с лентой, подтормаживающее устройство, электромагнитную муфту и гидравлическое тормозное устройство в виде гидробуфера, размещенного в нижней части канала СУЗ, а в качестве указателя положения стержня используется СД.
Подобные технические решения описаны в работе И.Я. Емельянова и др. - Основы проектирования механизмов управления ядерных реакторов. М.: Атомиздат, 1978 г., стр.46-47.
Известен взятый в качестве прототипа сервопривод, подробно описанный в Техническом описании и Инструкции по эксплуатации РБМ-К7 Сб. 151 ТО и ТУ, 1983 г. завод «Большевик», г. Ленинград. Сервопривод завода «Большевик» в основном имеет ту же кинематическую схему, что и представленные аналоги, но он имеет главную особенность, которая заключается в том, что его сервопривод имеет законченную конструкцию. Эта особенность заключается в том, что его сервопривод закачивается СД, который длинным соединительным кабелем соединен с устройством контроля положения стержня, далее как указатель положения (УП), который представляет собой сельсин-приемник (СП).
На фиг.1 представлена, как пример, типовая штатная схема управления и индикации положения поглощающего стержня, находящегося в активной зоне реактора, объясняющая принцип работы сервопривода. Сервопривод, как орган регулирования мощности реактора поглощающим стержнем, состоит из электродвигателя постоянного тока (1), понижающего редуктора (2), электромагнитной муфты, успокаивающей вибрации (3), электромагнитной муфты останова стержня (4), транспортного барабана с металлической лентой (5), поглощающего стержня (6), редуктора с нелинейным передаточным числом (7), СД (8), кабельной трассы (9). Сервоприводы всех поглощающих стержней расположены в центральном зале (ЦЗ) РУ и располагаются над активной зоной реактора. А ключи ручного и автоматического управления сервоприводами и гидравлическими тормозными устройствами находятся на значительном расстоянии от активной зоны, а именно в помещении БЩУ-О, в центре помещения которого расположено мнемотабло с указателями положения всех стержней - СП (10). Электромагнитная муфта (3) используется для уменьшения вибраций вращающихся валов электродвигателя (1) и понижающего редуктора (2).
Для штатных указателей положения стержней на всех энергоблоках используются сельсин-приемники (СП), поэтому здесь следует принимать СП как УП стержня.
На фиг.2, как пример, представлена штатная индикаторная схема включения УП одного поглощающего стержня в активной зоне реактора, коротко объясняющая основной принцип работы штатного УП. Штатная система УП одного регулирующего стержня состоит из двух сельсинов, а именно СД и УП (сельсина-приемника как непосредственного указателя положения стержня), и включена по схеме индикаторного режима, когда обмотки возбуждения Wb1 СД и Wb2 УП, а также однофазные обмотки синхронизации Wd1, Wd2, Wd3 сельсин-датчика и Wn1, Wn2, Wn3 сельсин-приемника соединены параллельно, а обмотки возбуждения обоих сельсинов Wb1 и Wb2 подключены к сети переменного тока. Сельсин, вал ротора которого является командным, называется СД. Сельсин, вал ротора которого является исполнительным, является УП стержня. Углы α1, α2 есть отклонения осей обмоток ротора СД и УП от вертикали или от оси обмоток Wd1 и Wn1 соответственно статоров СД и УП. Намагничивающая сила, создаваемая обмотками возбуждения, имеет синусоидальное распределение по окружности ротора (статора). Тогда пульсирующий с частотой сети поток возбуждения СД и УП наводит в обмотках синхронизации синфазные ЭДС, отличающиеся по амплитуде и фазе:

Отсюда следует, что при α1=α2, Edj=Enj (j=1, 2, 3) токи в линиях связи отсутствуют, а система находится в покое. Такое расположение роторов сельсинов называется согласованным. При изменении положения ротора СП появляется угол рассогласования θ=αд-αп≠0, который вызовет токи в цепи синхронизации I=Tj-Tg/2Z, j=1, 2, 3, где Z - полное сопротивление одной из трех обмоток синхронизации. Токи Ij вызовут пульсирующие потоки в обмотках синхронизации, которые, взаимодействуя с потоками электромагнитного возбуждения, создают так называемый синхронизирующий момент, стремящийся уменьшить угол рассогласования θ между роторами сельсинов. При этом одинаковый по величине, но противоположный по направлению синхронизирующий момент возникает как в СД, так и в УП. Следовательно, при вращении ротора СД ротор УП будет вращаться в ту же сторону. Нужно сказать, что СД входит в состав сервопривода и является указателем положения стержня в активной зоне реактора. Он служит для точной подстройки висящего стержня относительно концевых выключателей, которые ограничивают перемещение стержня. Точность работы УП в индикаторном режиме зависит от магнитной несимметрии, электрической несимметрии (неравенства сопротивлений фазовых обмоток синхронизации сельсинов и проводов линии связи), неравенства переходных сопротивлений в контактах щеток, а также небаланса ротора и шкалы или стрелки. На неподвижном корпусе УП закрепляется круглый циферблат, а на его вращающемся роторе закреплена указательная стрелка. Круглый циферблат по окружности разбит на семь сегментов (и соответствует глубине погружения стержня на 7 метров), каждый сегмент разбит на 10 делений. Передаточное число редуктора (7) выбрано таким образом, чтобы на один полный оборот как СД, так и УП приходилось 7 метров линейного перемещения поглощающего стержня в активной зоне реактора от верхнего концевого выключателя до нижнего концевого выключателя.
Существенными недостатками известного устройства управления и индикации положения поглощающих стержней регулирования являются:
- недостаточная точность в установке поглощающего стержня в ручном либо автоматическом режимах;
- недостаточная точность самого УП негативно сказывается на физическом расчете активной зоны реактора и в конечном счете приводит к ощутимой потере в точности контроля поля энерговыделения (мощности реактора);
- высокая энергоемкость.
Недостаточную точность установки поглощающего стержня можно частично компенсировать за счет устранения люфтов в механических соединениях, например вала электродвигателя с валом редуктора, вторичного вала редуктора с валом барабана с металлической лентой и т.д., но неточность непосредственно самого УП (СП) устранить невозможно. Во-первых, из-за электрической и магнитной несимметрии (неравенство сопротивлений фазовых обмоток ротора УП), состояния токосъемных щеток СД и УП, характеристик проводов соединительного кабеля. Во-вторых, указатель стрелки УП теряет в точности несколько сантиметров только из-за того, что ширина ее почти равна ширине минимального деления циферблата в 1,0 мм (или 10 см линейного перемещения стержня).
Сущность заявленного указателя положения поглощающего стержня в активной зоне реактора заключается в том, что устройство содержит сервопривод, включающий последовательно соединенные электродвигатель постоянного тока, понижающий редуктор с электромагнитной муфтой успокаивающей вибрации, электромагнитную муфту останова стержня, транспортного барабана с металлической лентой, на конце которой закреплен поглощающий стержень, редуктор с нелинейным передаточным числом и сельсин-датчик. При этом сельсин-датчик через кабельную трассу соединен последовательно с блоком резистивных делителей фазовых напряжений, замыкающих фазовые обмотки ротора сельсин-датчика, вычислительным комплексом и дешифратором адреса, преобразующими фазовые напряжения обмоток синхронизации сельсин-датчика в цифровой код, характеризующий положение поглощающего стержня, и передающийся на мнемотабло указателя положения стержней и через дополнительный разъем по интерфейсу RS-485 в локальную вычислительную сеть энергоблока.
Предлагаемым изобретением решаются задачи повышения надежности работы УП, точности и достоверности контроля глубины погружения стержней, а также уменьшения энергоемкости и упрощения конструкции. Кроме этого, повышение точности измерения указателей положения стержней повышает расчетную точность мощности активной зоны и, как следствие, повышает ядерную безопасность реакторной установки (РУ).
Устройство регистрации положения поглощающего стержня в активной зоне реактора безинерционно, является современным с точки зрения используемого уровня техники, что позволяет достигать указанные технические результаты. Одновременно за счет образования цифрового канала данных по положению стержней решается задача повышения точности контроля положения поглощающих стержней системы КСКУЗ в активной зоне РУ с улучшенной визуализацией информации на мнемотабло блочного щита управления оперативного (БЩУ-О), а также формирование массива данных для передачи по последовательному интерфейсу RS-485 в локальную информационную сеть блока станции с целью расширения отображения этой информации в других ответственных помещениях атомной электростанции (отдел ядерной безопасности и надежности (ОЯБиН), гл. инженера и т.п.) через дополнительный разъем.
Отличительная особенность предлагаемого указателя положения стержня заключается в том, что в качестве приемника синхронных фазовых напряжений ротора СД, пропорциональных линейному перемещению поглощающего стержня, применяются точные резистивные делители фазовых напряжений синхронизации ротора СД, которые регистрируются многоканальным измерительно-вычислительным комплексом. Далее эта информация обрабатывается по специальной программе в вычислительном комплексе, переводя линейное перемещение стержней в цифровой массив данных для отображения на мнемотабло БЩУ-О (Блочный щит управления - оперативный), и передачи в локальную сеть атомной электростанции.
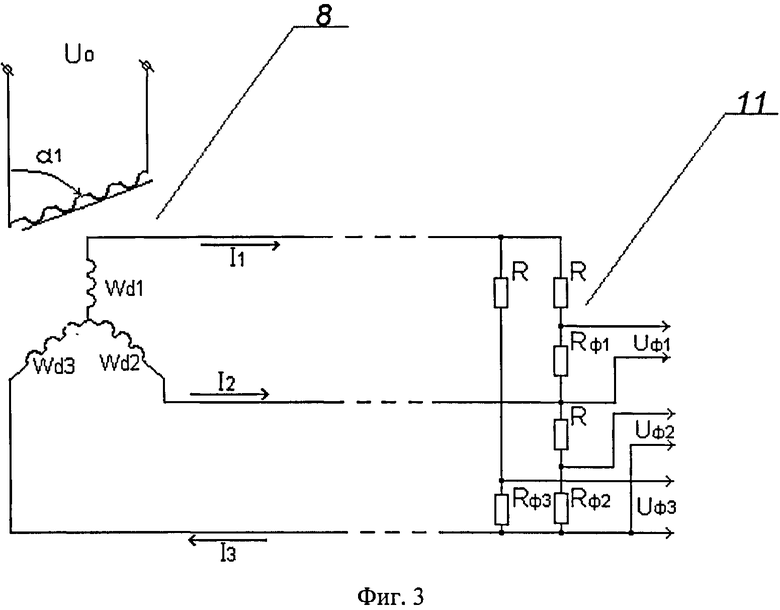
Предлагаемое изобретение представлено фигурами 3 и 4. На фиг.3 представлена принципиальная электрическая схема УП одного поглощающего стержня системы безопасности КСКУЗ, где в качестве исполнительного элемента представлен блок резистивных делителей R/Rф1, R/Rф2, R/Rф3 фазовых напряжений СД - блок (11). Здесь нужно понимать, что в предлагаемом изобретении УП - это не сельсин-приемник, а конкретный вычислительный комплекс согласно фиг.4. На фиг.4 представлена структурная схема регистрации и отображения информации сервопривода УП всех стержней системы КСКУЗ по предлагаемому изобретению, который состоит из электродвигателя (1), понижающего редуктора (2), электромагнитной муфты (3), электромагнитной муфты останова (4), транспортного барабана с металлической лентой (5), на конце которой закреплен поглощающий стержень (6), нелинейного редуктора (7), СД (8), кабельной трассы (9), блока резистивных делителей фазовых напряжений синхронизации СД (11), компьютерного вычислительного комплекса (12), блока дешифратора адреса (13) и индикационного мнемотабло (14) УП. Как, пример, на мнемотабло показаны: «2, 47» - глубина погружения стержня в метрах и «33-21» - адрес мнемонического расположения поглощающего стержня в активной зоне реактора.
Работа УП стержней в штатном варианте осуществляется следующим образом (см. фиг.1). Когда на БЩУ-О РУ принимается решение по ручному регулированию поля энерговыделения, например, для уменьшения мощности реактора, то на пульте управления мощностью реактора выбирается адрес, необходимого для этой процедуры, поглощающего стержня либо группы стержней (группа состоит из 4 стержней). И ключом управления сервопривода этого стержня включается электродвигатель (1), высокие обороты электродвигателя (1) уменьшаются понижающим редуктором (2), вращение второго вала понижающего редуктора (2) передается на транспортный барабан с металлической лентой (5), на конце которой закреплен поглощающий стержень (6), который под собственным весом опускается вниз. Вращение оси транспортного барабана (5) через «нелинейный» редуктор (7) передается ротору СД (8), который длинным кабелем (9) соединен с УП (10), расположенным на мнемотабло указателей всех стержней БЩУ-О. При изменении положения ротора (в процессе вращения) в фазовых цепях синхронизации обоих роторов происходит выравнивание токов, при котором ротор УП (10), поворачиваясь, принимает значение величины угла поворота ротора СД (8). При этом ведущий инженер управления реактором (ВИУР) контролирует величину перемещения этого стержня по указателю мощности реактора. В нужный момент ВИУР принимает решение на прекращение перемещения стержня, выключает питание электродвигателя (1), который за счет муфты останова (4) остановит стержень на новой высоте. Выбранный стержень останавливается и по новому положению стрелки УП (10), который находится на мнемотабло УП БЩУ-О, считывается новое значение положения стержня (группы стержней).
Рассмотрим работу одного канала регистрации и отображения УП по предлагаемому изобретению в ручном режиме на примере перемещения одного поглощающего стержня (фиг.4). Для корректировки поля энерговыделения реактора на БЩУ-О довольно часто используют ручной режим управления одним поглощающим стержнем либо группой стержней. На БЩУ-О предварительно согласовывается направление и предварительная величина перемещения поглощающего стержня. Перемещение поглощающего стержня вниз требуется для уменьшения мощности реактора или вверх - для увеличения мощности реактора. Допустим, необходимо уменьшить мощность реактора. Для этого ВИУР оперативной смены энергоблока на пульте управления мощностью реактора выбирает адрес нужного стержня и ключом управления сервопривода этого стержня включает электродвигатель (1). При этом вращение включенного электродвигателя (1) передается понижающему редуктору (2) и транспортному барабану с металлической лентой (5), которая начинает разматываться. При этом поглощающий стержень (6) начинает перемещаться внутрь активной зоны реактора, уменьшая его мощность. При достижении необходимой величины мощности реактора (по указателю мощности БЩУ-О) ВИУР смены нажимает кнопку останова электродвигателя (1). Включается муфта останова (4), которая прекращает перемещение стержня. Величина перемещения стержня считывается с УП данного стержня, указанного на мнемотабло (14).
Работа УП осуществляется следующим образом. Когда вращение транспортного барабана (5) через нелинейный редуктор (7) передается СД (8), то в фазовых цепях обмоток синхронизации Wd1, Wd2, Wd3 СД начинают перераспределяться фазовые токи (см. фиг.3), которые по кабельной трассе (9) передаются на БЩУ-О, где расположен блок (11) резистивных делителей фазовых напряжений синхронизации УП (см. фиг.4). Здесь нужно отметить, что величина фазовых токов в предлагаемой схеме значительно меньше, чем в штатной схеме, потому что сопротивлений резистивных делителей много больше фазовых обмоток сельсина-приемника прототипа. На фазовых резисторах Rф1, Rф2, Rф3 изменяются напряжения фаз обмоток синхронизации ротора СД Uф1, Uф2 и Uф3, см. фиг.3. Эти фазовые напряжения поступают на соответствующие входы многоканального вычислительного комплекса (12). Измерительный канал слота вычислительного комплекса, состоящий из трех аналого-цифровых преобразователей, оцифровывает переменные напряжения фаз ротора СД Uф1, Uф2 и Uф3. Процессор слота по установленной программе решает систему уравнений 1 из фазовых напряжений синхронизации, преобразуя эти напряжения в линейное перемещение стержня, и в цифровом виде отправляет в память управляющего компьютерного вычислительного комплекса (12). Затем эти данные передаются по внутренней связи в блок дешифратора адреса (13). В блоке дешифратора адреса (13) происходит переформатирование массива данных в десятичный код результатов измерения перемещения стержня и его мнемонический адрес расположения в активной зоне реактора, после чего эта информация передается на индикационное мнемотабло УП (14). Одновременно эта информация о перемещении стержня КСКУЗ из блока адреса (13) через дополнительный последовательный интерфейс RS-485 поступает на отдельный разъем для передачи в локальную информационную сеть блока станции с целью расширения отображения этой информации.
Следует напомнить, что любое изменение мощности реактора всегда контролируется не по УП, а по указателю мощности реактора на БЩУ-О.
В режиме автоматического регулирования мощности реактора включается следящая система, которая включается по команде устройств, регистрирующих изменение мощности реактора. Как только мощность реактора превысит величину заданной уставки мощности, следящая система даст команду на включение автоматических регуляторов (стержней), которые, воздействуя на активную зону реактора, вернут мощность реактора на установленную величину.
В качестве резистивных делителей фазовых напряжений R/Rф1, R/Rф2, R/Rф3 сельсин-датчика применяются сопротивления 1% точности. Rф1=Rф2=Rф3 определяются из соотношения Rф=(0,05-0,1)R при величине сопротивления R не более 50 кОм.
Композиция переменных напряжений, снимаемых с этих делителей напряжения, пропорциональна изменению положения стержня или группы стержней поглотителей в активной зоне реактора. Эти фазовые напряжения обмоток ротора с фазовых делителей всех сельсин-датчиков Uф1, Uф2, Uф3 поступают на блок резистивных делителей (11) и далее в вычислительный комплекс (12), где по специальной программе происходит их измерение, преобразование в цифровой код, пропорциональный линейным значениям перемещения стержней в активной зоне реактора.
Общее число поглощающих стержней системы КСКУЗ РУ типа РБМК-1000 порядка 200. Для регистрации перемещения одного стержня требуется три дифференциальных канала аналого-цифровых преобразователей (АЦП), для 200 СД потребуется 600 дифференциальных измерительных каналов. Эта задача реализуется путем применения 20-ти 32-х канальных слотов, которые входят в состав вычислительного комплекса (12). Измерительный слот в свою очередь представляет собой законченное устройство для приема и обработки информации от 10-ти СД, т.е. 32 дифференциальных сигналов, под управлением собственного процессора. Процессор каждого слота вычислительного комплекса (12) организует последовательную регистрацию 10-ти входных сигналов, осуществляет расчет положений роторов СД для каждого стержня КСКУЗ и преобразовывает эту информацию в цифровой вид для передачи в собственную оперативную память (ОЗУ) вычислительного комплекса. Таким образом, в вычислительном комплексе осуществляется регистрация параметров каждого СД, программный расчет и перевод их в линейное перемещение стержней, структурирование и создание базы данных в собственном ОЗУ, которая затем поступает в блок дешифратора адреса (13). В блоке дешифратора адреса УП происходит формирование пакета данных по адресам каждого поглощающего стержня, имеющего свой конкретный мнемонический адрес расположения в активной зоне реактора и на мнемотабло (14), на который и поступает информация из вычислительного комплекса УП. Поэтому, чем точнее настроен СД сервопривода по положению стержня, тем точнее будет конечный результат УП.
При работе на мощности скорость обновления информации на мнемотабло УП может обновляться по мере необходимости, например раз в сек, раз в 10 сек и т.д.
Кроме этого, информация о положении стержней КСКУЗ из дешифратора адреса через дополнительный последовательный интерфейс RS-485 поступает на отдельный разъем для передачи в локальную информационную сеть блока станции с целью расширения отображения этой информации на дополнительных информационных системах энергоблока.
Индикационное мнемотабло УП может быть построено на светодиодных индикаторах. Корпусы светодиодных индикаторов УП стержней (14) могут иметь различную цветовую окраску по принадлежности стержней к той или иной группе назначения, а также и цвет свечения цифрового индикатора. В качестве светодиодных индикаторов можно использовать четырехразрядные индикаторы красного и зеленого свечения типа FYQ-5641AHR-21 или матричные LED-индикаторы. Для четырехразрядных светодиодных индикаторов типа FYQ-5641AHR-21 четвертый разряд отводится для индикации состояния верхнего либо нижнего концевого выключателя, определяющего крайнее положение стержня.
В результате практического применения предлагаемого изобретения повышается точность контроля положения поглощающих стержней в активной зоне реактора, надежность, четкость отображения результатов измерений и существенно уменьшается энергоемкость всей системы УП, а также создается дополнительный цифровой канал УП для индикации на дополнительные информационные системы энергоблока. В настоящее время получены хорошие результаты при лабораторных испытаниях УП на стенде.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАСХОДА ТЕПЛОНОСИТЕЛЯ В ТЕХНОЛОГИЧЕСКОМ КАНАЛЕ РЕАКТОРНОЙ УСТАНОВКИ ТИПА РБМК-1000 | 2016 |
|
RU2643187C1 |
| Система автоматической стабилизации энергораспределения ядерного реактора | 1978 |
|
SU701360A1 |
| Устройство для намотки магнитопроводов | 1990 |
|
SU1749927A1 |
| Привод аварийной защиты ядерного реактора | 1975 |
|
SU555740A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ И ЗАЩИТЫ АТОМНЫХ РЕАКТОРОВ | 2003 |
|
RU2244965C2 |
| АДАПТИВНАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2239576C2 |
| Способ управления электродвигателем летучих ножниц | 1949 |
|
SU88439A1 |
| Устройство записи-воспроизведениягЕОфизичЕСКОй иНфОРМАции | 1979 |
|
SU805237A1 |
| Устройство для намотки магнитопроводов | 1985 |
|
SU1354265A1 |


Изобретение относится к измерительной технике и может быть использовано для контроля положения поглощающих стержней различного функционального назначения в активной зоне реактора, а также различных механических узлов и оборудования, например, на атомных электростанциях. Указатель положения поглощающего стержня в активной зоне реактора типа РБМК-1000 содержит сервопривод, включающий последовательно соединенные электродвигатель постоянного тока, понижающий редуктор с электромагнитной муфтой успокаивающей вибрации, электромагнитную муфту останова стержня, транспортного барабана с металлической лентой, на конце которой закреплен поглощающий стержень, редуктор с нелинейным передаточным числом и сельсин-датчик. При этом сельсин-датчик через кабельную трассу соединен последовательно с блоком резистивных делителей фазовых напряжений, замыкающих фазовые обмотки синхронизации ротора сельсин-датчика, вычислительным комплексом и дешифратором адреса, преобразующими фазовые напряжения обмоток синхронизации сельсин-датчика в цифровой код, характеризующий адрес и положение поглощающего стержня в активной зоне реактора. Эта информация передается на мнемотабло указателя положения стержней и через дополнительный разъем по интерфейсу RS-485 поступает в локальную информационную сеть энергоблока. Технический результат заключается в повышении надежности, точности регистрации положения стержней, увеличении четкости отображения результатов измерений и уменьшении энергоемкости. 4 ил.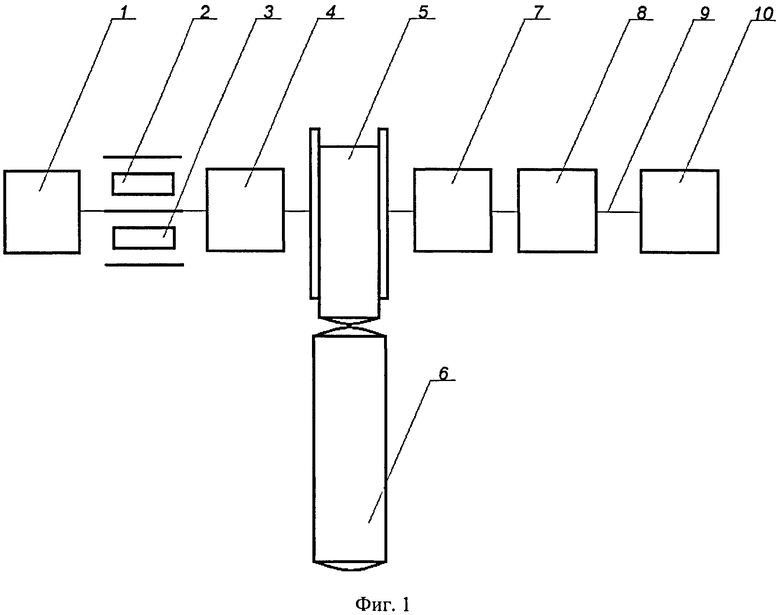
Указатель положения поглощающего стержня в активной зоне реактора, содержащий сервопривод, включающий последовательно соединенные электродвигатель постоянного тока, понижающий редуктор с электромагнитной муфтой успокаивающей вибрации, электромагнитную муфту останова стержня, транспортного барабана с металлической лентой, на конце которой закреплен поглощающий стержень, редуктор с нелинейным передаточным числом и сельсин-датчик, отличающийся тем, что сельсин-датчик через кабельную трассу соединен последовательно с блоком резистивных делителей фазовых напряжений, замыкающих фазовые обмотки синхронизации ротора сельсин-датчика, вычислительным комплексом и дешифратором адреса, преобразующими фазовые напряжения обмоток синхронизации сельсин-датчика в цифровой код, характеризующий положение поглощающего стержня и передающийся на мнемотабло указателя положения стержней и через дополнительный разъем по интерфейсу RS-485 в локальную информационную сеть энергоблока.
| Устройство для затормаживания челнока в челночной коробке ткацкого станка | 1937 |
|
SU52243A1 |
| Форма выполнения пеленгаторного устройства | 1927 |
|
SU28938A1 |
| Устройство для управления ядерным реактором | 1974 |
|
SU497882A1 |
| Привод аварийной защиты ядерного реактора | 1975 |
|
SU555740A1 |
| US 3852661 A, 03.12.1974 | |||

