Перекрестная ссылка на родственные заявки
Настоящая заявка является частичным продолжением заявки под серийным номером 10/757340, поданной 13 января 2004 г., содержание которой включено здесь согласно ссылке.
Область техники, к которой относится изобретение
Настоящее изобретение относится вообще к технологиям, связанным с определением местоположения и навигацией с использованием спутников, и, более конкретно, к разрешению плавающей неоднозначности несущей в региональной, широкодиапазонной или глобальной системе определения местоположения и/или навигации по несущей фазе.
Уровень техники
Глобальная система определения местоположения (Global Positioning System, сокращенно GPS) использует спутники в космосе для определения местоположения объектов на Земле. Из спутников системы GPS сигналы приходят в GPS приемник и используются для определения положения GPS приемника. В настоящее время для гражданских GPS приемников доступны два вида GPS измерений, соответствующие каждому каналу коррелятора с захваченным сигналом спутника GPS. Этими двумя видами GPS измерений являются псевдодальность и интегрированная фаза несущей для двух несущих сигналов L1 и L2 с частотами 1,5754 ГГц и 1,2276 ГГц или длинами волн 0,1903 м и 0,2442 м, соответственно. Измерение псевдодальности (или измерение кода) является основным GPS измерением, которое могут выполнять все виды GPS приемников. Оно использует коды С/А или Р, которыми модулированы несущие сигналы. Данное измерение фиксирует кажущийся период времени, за который соответствующий код проходит от спутника до приемника, т.е. время, когда сигнал приходит в приемник в соответствии с часами приемника, минус время, когда сигнал выходит из спутника в соответствии с часами спутника. Измерение несущей фазы осуществляется путем интегрирования восстановленной несущей сигнала, когда он входит в приемник. Таким образом, измерение несущей фазы является также мерой временного интервала прохождения сигнала, определяемого разностью между временем, когда сигнал выходит из спутника в соответствии с часами спутника, и временем, когда он входит в приемник в соответствии с часами приемника. Однако поскольку число целых циклов несущей фазы при прохождении сигнала между спутником и приемником, когда приемник начинает отслеживать фазу несущей частоты сигнала, обычно неизвестно, временной интервал прохождения сигнала может иметь погрешность, определяемую множеством циклов несущей, т.е. существует неоднозначность целого числа циклов при измерении несущей фазы.
В существующих GPS измерениях дальность или расстояние между GPS приемником и каждым из множества спутников вычисляется путем умножения времени прохождения сигнала на скорость света. Эти дальности обычно называются псевдодальностями (ложными дальностями), поскольку часы приемника обычно имеют значительную временную погрешность, которая обусловливает общую систематическую ошибку в измеренной дальности. Данная общая систематическая ошибка, связанная с погрешностью часов спутника, разрешается наряду с координатами приемника в качестве элемента обычных навигационных расчетов. Ошибки или шумовые составляющие в вычисляемой дальности могут быть обусловлены другими факторами, включая ошибки эфемерид, ошибки синхронизации часов спутников, атмосферные воздействия, шумы приемников и ошибки, связанные с многолучевым распространением сигналов. При навигации только с использованием системы GPS, когда пользователь при помощи GPS приемника получает код и/или дальность, измеряемую по фазе несущей, относительно множества находящихся в поле зрения спутников, без обращения к любой базовой станции, пользователь очень ограничен в своих возможностях для уменьшения ошибок или шумовых составляющих в измеряемых дальностях.
Для устранения или уменьшения этих ошибок в GPS приложениях обычно используются дифференциальные коррекции. Дифференциальные коррекции GPS (Differential GPS - DGPS) обычно включают базовый опорный GPS приемник, GPS приемник пользователя (или навигационный приемник) и канал связи между приемником пользователя и базовым приемником. Базовый приемник расположен в известной точке, и данная известная точка используется для генерирования коррекций, связанных с некоторыми или всеми вышеуказанными факторами, вносящими погрешности. Коррекции передаются в приемник пользователя, и приемник пользователя затем использует данные коррекции для соответствующего уточнения своего вычисленного местоположения. Коррекции могут быть в виде коррекций положения базового приемника, определенного на базовом участке, или в виде коррекций часов конкретного GPS спутника и/или его орбиты. Дифференциальные коррекции с использованием измерений несущей фазы часто называют операциями определения местоположения или навигации в режиме кинематики реального времени (real-time kinematic - RTK).
Основной принцип дифференциальной системы GPS (DGPS) заключается в использовании пространственной и временной корреляции ошибок, свойственных GPS измерениям, для устранения факторов шума в измерениях псевдодальности и/или несущей фазы, обусловленных данными факторами погрешности. Однако, если ошибка синхронизации часов GPS спутника, которая проявляется как систематическая ошибка при измерении псевдодальности или несущей фазы, точно коррелирована между базовым приемником и приемником пользователя, то большинство других факторов погрешности либо некоррелированы, либо их корреляция ослабляется в широкодиапазонных приложениях, т.е. когда расстояние между базовым приемником и приемником пользователя становится значительным.
Для того чтобы снизить неточность системы DGPS в широкодиапазонных приложениях, разработаны различные методы региональной, широкодиапазонной или глобальной DGPS (в дальнейшем называемой широкодиапазонной DGPS или WADGPS). WADGPS включает сеть из множества базовых станций, связанных с вычислительным центром или хабом. Коррекции ошибок вычисляются в хабе на основе известных координат базовых станций и проведенных при помощи них измерений. Затем вычисленные коррекции ошибок передаются пользователям посредством канала связи, такой как спутниковая, телефонная или радиосвязь. За счет использования множества базовых станций WADGPS обеспечивает более точные оценки коррекций ошибок.
Таким образом, разработан ряд различных методов для обеспечения высокоточной дифференциальной навигации с использованием GPS измерений несущей фазы. Метод RTK имеет обычную точность приблизительно 1 см. Однако для получения такой точности должна быть определена неоднозначность целого числа циклов в дифференциальных измерениях несущей фазы. Если расстояние между приемником пользователя и базовым приемником (базовая дальность) мало, тогда метод RTK является очень эффективным, поскольку в данном случае неоднозначность целого числа циклов может быть разрешена не только точно, но также и быстро. С другой стороны, если базовая дальность превышает несколько десятков километров, определить неоднозначность целого числа циклов может оказаться невозможным, и обычная точность RTK не может быть достигнута. Другим ограничением метода RTK является необходимость обеспечения локальной радиосвязи между базовым приемником и навигационным приемником.
Методы WADGPS, использующие дифференциальный способ измерения несущей фазы, могут также обеспечить очень высокую точность навигации. Дифференциальные методы WADGPS также характеризуются надежными низкочастотными каналами дальней связи или надежными каналами спутниковой связи. Таким образом, поправки обычно могут передаваться в навигационные приемники без значительной задержки. Однако методы WADGPS обычно интерпретируют неоднозначности целого числа циклов как вещественную (не целочисленную) переменную величину и разрешают «плавающую неоднозначность», которая обычно очень плохо определяется, пока не получены данные измерений, охватывающие временной интервал значительного изменения геометрии спутников. Таким образом, в приложении WADGPS для разрешения «плавающей неоднозначности» часто требуется временной интервал порядка одного или двух часов, для того чтобы обеспечить точность навигационного определения менее 10 см.
Точное определение местоположения (с погрешностью менее 1 см) может быть также обеспечено с использованием локальной системы определения местоположения. Обычные локальные системы определения местоположения, использующие активные или пассивные элементы, включают акустические и лазерные системы измерения дальности, например, на основе времени прохождения сигналов и/или доплеровском сдвиге частоты. Акустические системы обычно используют наземные ориентиры и/или маяки-ответчики для измерения дальности в пределах сети устройств, некоторые из которых являются стационарными, для образования локальной системы координат. К сожалению, из-за особенностей распространения звуковых сигналов через воздух акустические системы могут измерять дальность только с точностью порядка сантиметра или более и только на относительно малых дальностях. Локальные системы определения местоположения на основе лазеров используют измерения не только угла, но и дальности между устройством и одним или более отражающих объектов, таких как призмы, для определения положения устройства по трем углам и трем сторонам. Эффективная дальность действия локальных систем определения местоположения на основе лазеров обычно также ограничена относительно малыми дальностями (порядка 1000-10000 м).
Раскрытие изобретения
Настоящее изобретение включает способ объединенного использования методов навигации RTK и WADGPS таким образом, чтобы недостатки каждого метода могли быть компенсированы достоинствами другого метода. Основной недостаток метода WADGPS заключается в том, что навигационный приемник требует длительного промежутка времени (часто более часа) для определения величин плавающей неоднозначности, которые необходимы для преобразования измерений несущей фазы в точные измерения дальности. Основные недостатки метода RTK заключаются в том, что он требует канала передачи данных в режиме реального времени (обычно в пределах прямой видимости) между GPS приемником пользователя и базовым GPS приемником, и что неоднозначность целого числа циклов может быть определена только тогда, когда дальность между базовым GPS приемником и GPS приемником пользователя относительно мала.
Эти недостатки могут быть устранены посредством использования способа объединенного использования методов навигации RTK и WADGPS в соответствии с одним вариантом осуществления настоящего изобретения. Способ включает в себя использование известного местоположения приемника пользователя для инициализации величин плавающей неоднозначности в системе WADGPS. Если приемник пользователя неподвижен, известным положением приемника пользователя может быть измеренное положение или положение, полученное из предварительной операции. Если же приемник пользователя перемещается, известное положение может быть определено с использованием системы RTK.
Таким образом, в объединенной системе, когда имеется в наличии канал связи для навигации с использованием локальной системы определения местоположения и/или RTK, данные местоположения, скорости и времени (position, velocity and time - PVT) на выходе приемника пользователя могут быть получены с использованием локальной системы определения местоположения и/или системы RTK, при этом система WADGPS работает параллельно, и ее выходные данные непрерывно инициализируются для согласования с выходными данными системы RTK. Если канал связи для локальной системы определения местоположения пропадает, данные PVT на выходе приемника пользователя могут быть получены с использованием системы RTK и/или системы WADGPS, которая находилась во включенном состоянии, пока работала локальная система определения местоположения. Если же пропадает канал связи для навигации RTK или если приемник пользователя находится слишком далеко от базовой станции в системе RTK, то данные PVT на выходе приемника пользователя могут быть получены с использованием системы WADGPS, которая находилась во включенном состоянии, пока работала система RTK. Такая инициализация исключает период вхождения в синхронизм, обычно занимающий от 15 минут до 2 часов, требующийся для разрешения величин плавающей неоднозначности, когда местоположение GPS приемника пользователя неизвестно. Это обеспечивает получение от системы WADGPS очень точных данных PVT, пока локальная система определения местоположения и/или система RTK являются недоступными или неточными, и делает метод WADGPS более эффективным для обеспечения определения местоположения и навигации с высокой точностью в режиме реального времени.
Краткое описание чертежей
Фиг.1 иллюстрирует блок-схему комбинации системы WADGPS, локальной системы определения местоположения и локальной системы RTK в соответствии с одним вариантом осуществления настоящего изобретения.
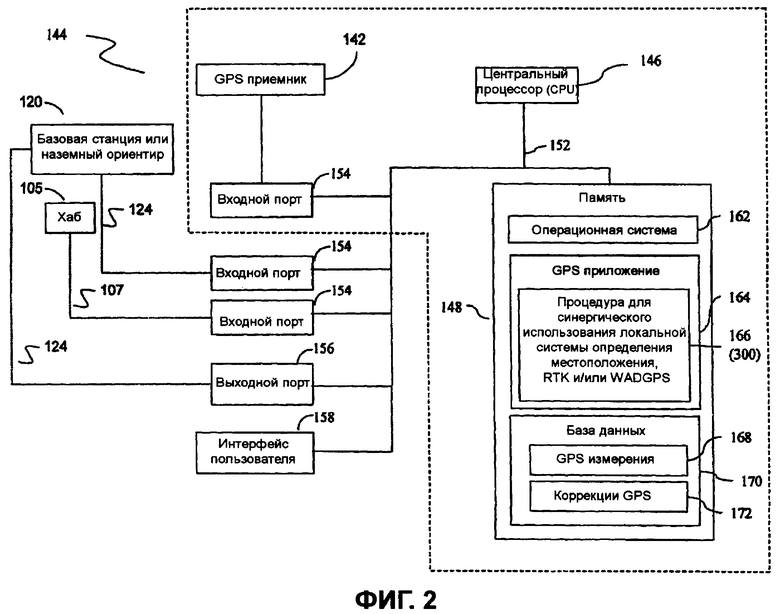
Фиг.2 изображает блок-схему компьютера, соединенного с GPS приемником пользователя.
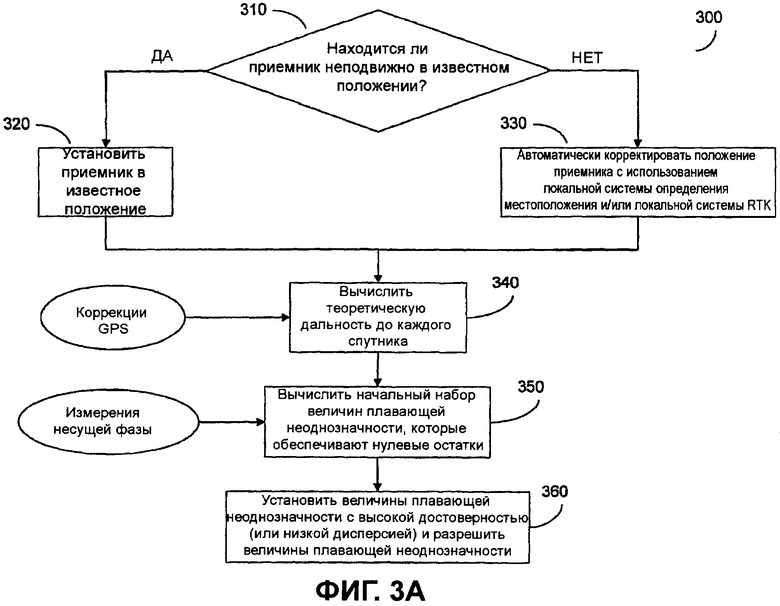
Фиг.3А иллюстрирует блок-схему алгоритма, иллюстрирующую способ объединенного использования системы WADGPS, локальной системы RTK и/или локальной системы определения местоположения.
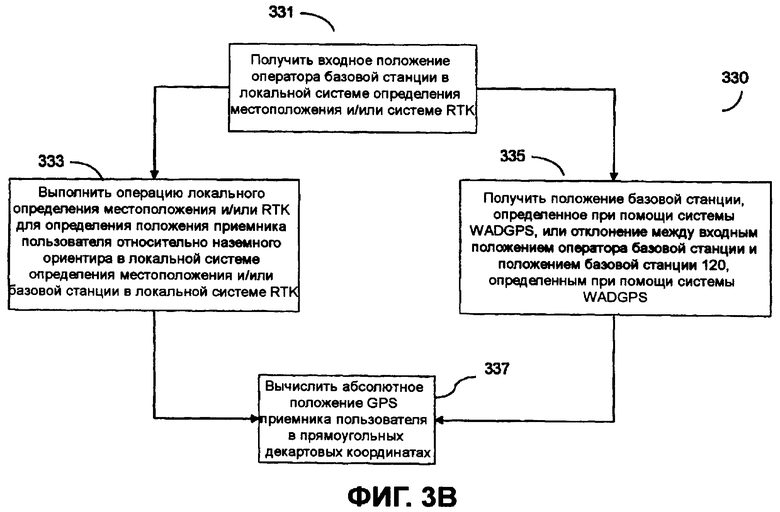
Фиг.3В иллюстрирует блок-схему алгоритма, иллюстрирующую способ коррекции местоположения приемника с использованием локальной системы RTK.
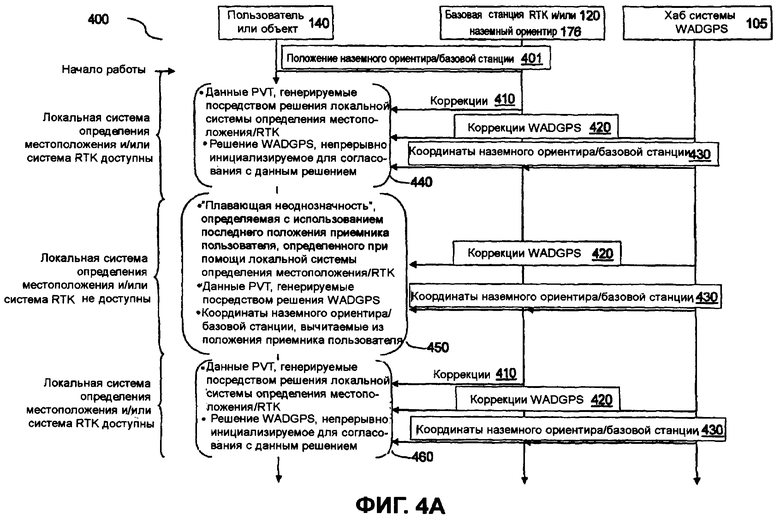
Фиг.4А иллюстрирует блок-схему алгоритма, иллюстрирующую процесс объединенной работы с использованием системы WADGPS и локальной системы RTK.
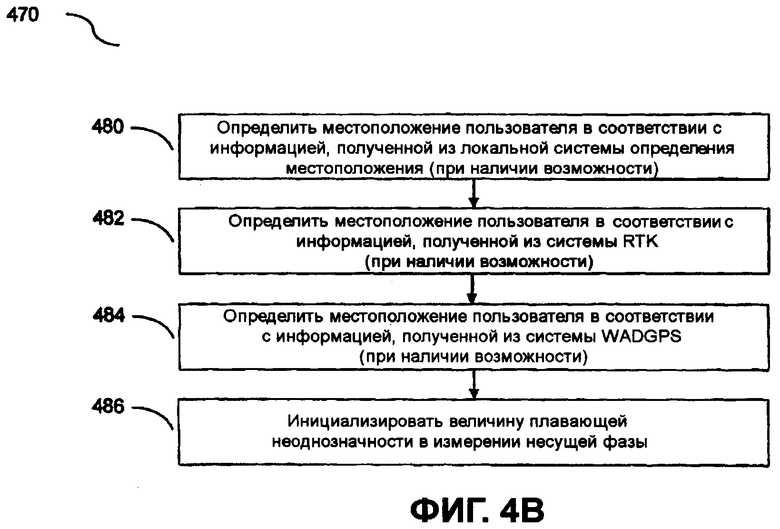
Фиг.4В иллюстрирует блок-схему алгоритма, иллюстрирующую процесс использования локальной системы определения местоположения, локальной системы RTK и/или системы WADGPS.
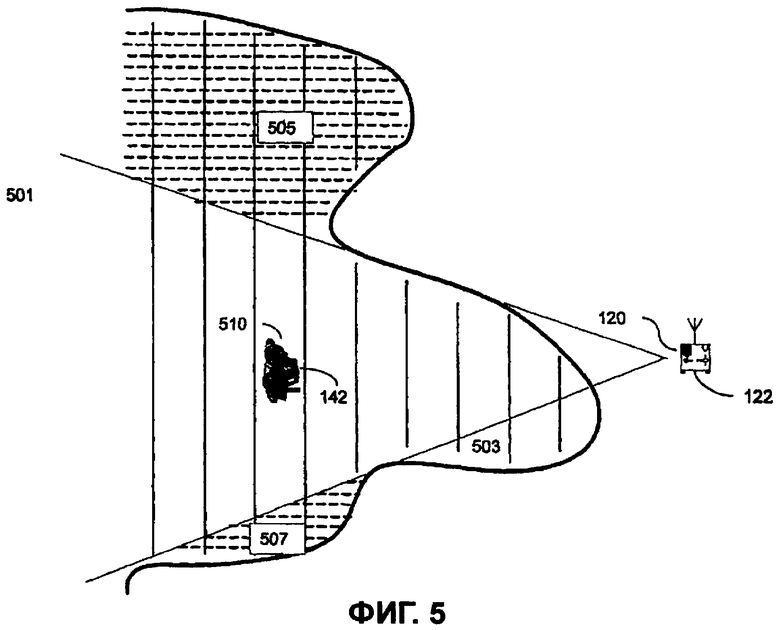
Фиг.5 иллюстрирует схему, иллюстрирующую ситуацию, в которой может использоваться объединенная система.
Осуществление изобретения
Фиг.1 иллюстрирует широкодиапазонную или глобальную дифференциальную систему GPS (WADGPS) 100 в соответствии с одним вариантом осуществления настоящего изобретения. Как показано на Фиг.1, система WADGPS включает сеть базовых станций 120, каждая из которых содержит GPS приемник 122, и один или более обрабатывающих хабов 105. Базовые станции 120 непрерывно передают данные GPS измерений в хаб 105 для обработки. Эти данные измерений включают измерения кода и несущей фазы сигнала GPS, эфемериды и другую информацию, полученную на основе сигналов, принимаемых базовыми станциями 120 от множества спутников 110. Базовые станции 120 расположены в известных точках в широкой зоне 101, такой как континент для широкодиапазонной системы DGPS, или по всему земному шару для глобальной сети DGPS. Хабами 105 являются технические средства, в которых осуществляется обработка данных GPS измерений и вычисление поправок DGPS. При наличии множества независимых хабов предпочтительно, если они географически разнесены и работают параллельно.
Система WADGPS 100 может быть использована одним или более пользователями (или устройствами или объектами пользователя) 140, каждый из которых имеет GPS приемник 142 для определения местоположения и/или навигации. В одном варианте осуществления настоящего изобретения пользователь 140 связан с ближайшей базовой станцией 120 посредством канала радиосвязи RTK так, что приемник 142 пользователя и ближайшая базовая станция 120 образуют локальную систему RTK 150. В некоторых вариантах осуществления пользователь 140 может быть также связан с локальной системой 174 определения местоположения, имеющей один или более наземных ориентиров 176. Один или более наземных ориентиров 176 могут быть активными или пассивными. Каждый один или более наземных ориентиров 176 может содержать GPS приемник 122.
Система 100 включает также обычные каналы передачи данных (не показанные) для обеспечения надежных средств для передачи данных GPS измерений из базовых станций 120 в хабы 105 и для передачи вычисленных поправок из хабов 105 базовым станциям и пользователям 140. Континентальная система WADGPS обычно имеет приблизительно от 3 до 10 базовых приемников, а глобальная система WADGPS обычно имеет приблизительно от 20 до 100 базовых приемников, передающих данные в хабы 105. В одном варианте осуществления настоящего изобретения данные GPS измерений передаются из базовых станций 120 в хабы через Интернет, и вычисленные поправки также через Интернет передаются из хабов в одну или более наземных станций (не показанных) для передачи на борт одного или более спутников (не показанных), которые затем транслируют вычисленные поправки для приема базовыми станциями 120 и приемником 142 пользователя.
В одном варианте осуществления настоящего изобретения пользователь или объект 140 также оснащен компьютером 144, соединенным с GPS приемником 142 пользователя. Как показано на Фиг.2, компьютер 144 включает центральный процессор (central processing unit - CPU) 146, память 148, один или более входных портов 154, один или более выходных портов 156 и (по желанию) интерфейс пользователя 158, соединенные друг с другом посредством одной или более шин связи 152. Память 148 может включать быстродействующую оперативную память и может включать энергонезависимое запоминающее устройство большой емкости, такое как один или более магнитных дисков или флэш-ПЗУ.
Предпочтительно, если память 148 хранит операционную систему 162, процедуры 164 GPS приложения и базу 170 данных. Процедуры 164 GPS приложения могут включать процедуры 166 для осуществления способа 300 объединенного использования локальной системы 174 определения местоположения, локальной системы RTK 150 и/или системы WADGPS 160, как более подробно описано ниже. Операционная система 162 и прикладные программы и процедуры 164, хранимые в памяти 148, предназначены для выполнения центральным процессором 146 компьютера 144. Предпочтительно, если память 148 также хранит структуры данных, используемые во время выполнения процедур 164 GPS приложения, включая GPS измерения 168 псевдодальности и несущей фазы, поправки 172 GPS, полученные из хабов, а также другие структуры данных, рассматриваемые в данном документе.
Входные порты 154 предназначены для получения данных из GPS приемника 142, для получения информации из базовой станции или наземного ориентира 120 в локальной системе 174 определения местоположения или системе RTK 150 через канал 124 радиосвязи и для получения поправок GPS и другой информации из хабов 105 через канал 107 спутниковой связи. Выходной порт 156 используется для вывода данных в базовую станцию или наземный ориентир 120 через канал 124 радиосвязи или акустические или лазерные устройства (не показанные). В одном варианте осуществления настоящего изобретения центральный процессор 146 и память 148 компьютера 144 интегрированы с GPS приемником 142 в одно устройство с единым корпусом, как показано на Фиг.2. Однако для осуществления способов настоящего изобретения такое интегрирование не требуется.
Следовательно, пользователь или объект 140 может работать в трех различных режимах либо одновременно, либо в разные периоды времени. Пользователь или объект 140 может работать в режиме WADGPS, в котором пользователь или объект 140 определяет свое местоположение или управляет своим движением с использованием системы WADGPS 100, в режиме RTK, в котором пользователь или объект 140 определяет свое местоположение или управляет своим движением с использованием локальной системы RTK 150, и/или в режиме локального определения местоположения, в котором пользователь или объект 140 определяет свое местоположение или управляет своим движением с использованием локальной системы 174 определения местоположения. Когда пользователь или объект 140 находится рядом с одним или более наземных ориентиров 176, с которым он может быть соединен, и может быть обеспечена связь между пользователем или объектом 140 и одним или более наземных ориентиров 176, пользователь может использовать один или более наземных ориентиров 176 для определения своего местоположения относительно одного или более наземных ориентиров 176. Когда пользователь или объект 140 находится рядом с базовой станцией 120, с которой он соединен, и может быть обеспечена радиосвязь между пользователем или объектом 140 и базовой станцией 120, пользователь может использовать локальную систему RTK 150 для определения своего местоположения относительно базовой станции 120. Локальная система 174 определения местоположения и локальная система RTK 150 являются более эффективными по сравнению с системой WADGPS 100, поскольку они обеспечивают более высокую точность и быстрое разрешение неоднозначности целого числа циклов, как объясняется ниже.
При использовании локальной системы RTK 150, когда измерения проводятся относительно n спутников 110 в поле зрения базового GPS приемника 122 и соответствующего GPS приемника 142 пользователя, измерения могут быть использованы для определения положения пользователя или объекта 140 в соответствии со следующим уравнением в матричной форме:
 (1),
(1),
где ∇Ф = [∇ϕ 1 ∇ϕ 2 … ∇ϕ n]T является вектором измерений несущей фазы, образованным дифференциальными измерениями несущей фазы относительно каждого из n спутников 110,
N = [N 1 N 2 … N n]T является вектором целочисленной неоднозначности, образованным дифференциальной целочисленной неоднозначностью, связанной с каждым дифференциальным измерением несущей фазы в векторе измерений несущей фазы,
Н = [h1 h2 … hn]T является матрицей чувствительности измерений, образованной единичными векторами от пользователя или объекта 140 до n спутников 110,
х - реальный неизвестный вектор состояния (или реальный вектор), включающий вектор положения от базовой станции 120 до пользователя или объекта 140 в локальной системе RTK 150, и
nϕ = [nϕ1 nϕ2 … nϕn]T является вектором шума измерения (или вектор невязок измерений дальности по фазе несущей), образованным шумом дифференциального измерения несущей фазы относительно каждого из n спутников 110.
Для разрешения реального вектора х с использованием уравнения (1) необходимо разрешение вектора целочисленной неоднозначности N. Разработано много различных способов для разрешения величин целочисленной неоднозначности, входящих в вектор целочисленной неоднозначности N, и эти способы обычно используют процесс поиска для нахождения сочетания величин целочисленной неоднозначности, которые удовлетворяют определенным критериям, таким как минимальная норма вектора невязок Δϕ,
 (2),
(2),
где Δϕ - вектор невязок измерений дальности по фазе несущей, соответствующий вероятному вектору целочисленной неоднозначности  , включающий комбинацию величин целочисленной неоднозначности, и х - решение уравнения (1) методом наименьших квадратов,
, включающий комбинацию величин целочисленной неоднозначности, и х - решение уравнения (1) методом наименьших квадратов,
 (3)
(3)
или
 (4),
(4),
где
 (5)
(5)
является ковариационной матрицей измерений, образованной σi , которое является среднеквадратическим отклонением шума дифференциального измерения несущей фазы nϕ, вычисляемым с использованием обычных способов. Пример способов вычисления σi можно найти в работе Питера Бона «Точность, взаимная корреляция и временная корреляция GPS измерений фазы и кода» (Precision, Cross Correlation, and Time Correlation of GPS Phase and Code Observations), GPS Solutions, Том.4, №2, осень 2000 г., стр. 3-13 или в кандидатской диссертации Yang, Y. «Способы определения пространственного положения с высокой степенью интеграции для недорогой инерциальной навигации: GPS приемник с двумя антеннами и GPS приемник/магнитометр» (Tightly Integrated Attitude Determination Methods for Low-Cost Inertial Navigation: Two-Antenna GPS and GPS/Magnetometer), отделение разработки электрических систем, Калифорнийский университет, Риверсайд, шт.Калифорния, июнь 2001 г., обе работы включены здесь согласно ссылке.
Другие примеры способов поиска могут быть найдены в работе Hatch, R. «Мгновенное разрешение неоднозначности» (Instantaneous Ambiguity Resolution), Труды симпозиума KIS 1990 г., Банф, Канада, которая включена здесь согласно ссылке, и в патентной заявке «Быстрое разрешение неоднозначности для кинематической съемки и навигации в режиме реального времени» (Fast Ambiguity Resolution for Real Time Kinematic Survey and Navigation), порядковый номер патентной заявки 10/338264, которая также включена здесь согласно ссылке.
При разрешении целочисленной неоднозначности местоположение, скорость и время (PVT) приемника 142 пользователя могут быть вычислены с высокой точностью как решения локальной системы RTK 150.
С использованием локальной системы 174 определения местоположения можно с высокой точностью вычислить местоположение, скорость и время (PVT) приемника 142 пользователя как решения локальной системы 174 определения местоположения. Например, информация о дальности и угле относительно одного или более наземных ориентиров может быть определена с использованием времени прохождения сигналов и/или доплеровских сдвигов частоты. Дополнительное рассмотрение определения информации о дальности и угле в локальной системе определения местоположения содержится в патентной заявке США порядковый номер 11/103964, озаглавленной «Усовершенствованная радиолокационная система для локального определения местоположения» (Improved Radar System for Local Positioning), поданной 11 апреля 2005 г., содержание которой включено здесь согласно ссылке. Кроме измерений, проводимых относительно n спутников 110 в поле зрения GPS приемника 120 в одном или более наземных ориентиров 176 и связанного GPS приемника 142 пользователя, данные измерения могут быть использованы для определения местоположения пользователя или объекта 140 в соответствии с вышеприведенными уравнениями.
Несмотря на свои многочисленные преимущества, локальная система 174 определения местоположения и/или локальная система RTK 150 может быть недоступной для пользователя или объекта 140, поскольку пользователь может переместиться в положение, которое находится слишком далеко от одного или более наземных ориентиров 176 и/или базовой станции 120 или находится за пределами видимости одного или более наземных ориентиров 176 и/или базовой станции 120, так что невозможно обеспечить канал связи и/или канал 124 радиосвязи между пользователем или объектом 140 и наземным ориентиром и/или базовой станцией. В таких ситуациях невозможно эффективно устранить погрешность, вызванную влиянием ионосферы, посредством учета разницы между измерениями пользователя или объекта 140 и наземного ориентира 176 и/или базовой станции 120. Данная погрешность влияет на указанный процесс поиска для вектора целочисленной неоднозначности, поскольку она приводит к увеличению остаточной погрешности измерений, включенной в вектор невязок Δϕ.
Следовательно, в ситуациях, когда локальная система 174 определения местоположения и локальная система RTK 150 являются недоступными или не обеспечивают достаточную точность вследствие значительного расстояния между GPS приемником пользователя и наземным ориентиром и базовой станцией, пользователь, по всей вероятности, будет вынужден работать в режиме WADGPS, в котором используется другой подход к разрешению целочисленной неоднозначности. При использовании системы WADGPS 100 каждая неоднозначность целого числа циклов оценивается как действительная (нецелая) переменная величина. Данная практика часто называется как определение величины «плавающей неоднозначности». Один способ для определения величины «плавающей неоднозначности» включает формирование измерений кода и несущей фазы с поправкой на рефракцию на основе непосредственных GPS измерений, проведенных пользователем или объектом 140, масштабирование измерений несущей фазы в одних единицах с измерениями кода и вычитание каждого масштабированного измерения несущей фазы из соответствующего измерения кода для получения величины поправки. В одном варианте осуществления настоящего изобретения измерение кода с поправкой на рефракцию, обозначенное PRC, определяется по следующей формуле
 ,
,
где Р 1 и Р 2 - непосредственные измерения кода псевдодальности на частотах сигналов L1 и L2, соответственно, f 1 и f 2 в конкретной эпохе измерений. Измерение несущей фазы с поправкой на рефракцию, обозначенное как L RC, определяется по аналогии следующим образом:

где L 1 и L 2 являются измерениями несущей фазы, масштабированными длинами волн сигналов L1 и L2, соответственно, и каждое включает приблизительную величину целочисленной неоднозначности, которая добавлена для приближения масштабированного измерения несущей фазы к той же величине, что соответствующее измерение кода. Таким образом,

где φ 1 и φ 2 являются непосредственными измерениями несущей фазы на частотах сигналов L1 и L2, соответственно, в той же самой эпохе измерений, и величины целого числа циклов N 1 и N 2 инициализированы в начале слежения за фазой несущей пользователем или объектом 140 для получения величин, которые находятся в пределах одной длины волны несущей соответствующих измерений кода, для того чтобы поддерживать малые разности между масштабированными измерениями несущей фазы и соответствующими измерениями кода. Исходя из уравнения (7), отмечается, что измерение несущей фазы с поправкой на рефракцию включает неоднозначность целого числа циклов с длиной волны λ, определяемой посредством суммы f 1 и f 2 (которая равна приблизительно 2,803 ГГц), так что λ равна приблизительно 0,1070 м, т.е. с/(f 1 + f 2 ).
Поскольку ионосферные эффекты устранены из измерений кода и измерений несущей фазы в соответствии с уравнениями (6)-(9), а влияния погрешностей часов спутника и орбиты на измерения псевдодальности и несущей фазы остались неизменными, значения PRC и L RC, полученные на этапе 310, должны быть практически одинаковыми за исключением возможной неоднозначности целого числа циклов, связанной с измерением несущей фазы L RC и более высокого уровня шума многолучевости в измерении кода PRC . Это обеспечивает возможность разрешения неоднозначности целого числа циклов в L RC путем сглаживания отклонения (0=PRC -L RC ) между измерением кода с поправкой на рефракцию и измерением несущей фазы с поправкой на рефракцию в серии эпох измерений так, что данное отклонение становится все более и более точной оценкой «плавающей неоднозначности». Сглаженная величина отклонения может также регулироваться посредством использования фиксированных остатков измерений для обеспечения дополнительного регулирования измерения несущей фазы, для того чтобы отрегулированные остатки измерений были близки к нулю.
В одном варианте осуществления настоящего изобретения отклонение сглаживается посредством принятия расширяющегося среднего значения отклонения в соответствии со следующим уравнением:

где i = 1,2,3,... используется для обозначения эпохи измерений, а величина η является доверительной величиной, которая увеличивается, поскольку O i становится более точной оценкой величины плавающей неоднозначности. В одном варианте осуществления настоящего изобретения η равно i, пока достигнута максимальная величина усреднения. Например, если предположить, что измерение несущей фазы содержит всего 1/100 долю шума измерения кода, то величина η будет составлять менее чем 100 в квадрате или 10000. Таким образом, уравнение (9) может вычисляться рекурсивно, пока не будет достигнута заранее установленная точность величины плавающей неоднозначности.
При сглаженном отклонении O i сглаженное измерение кода с поправкой на рефракцию S может быть получено путем сложения измерения несущей фазы с поправкой на рефракцию для текущей эпохи измерений со сглаженным отклонением, то есть
 (11),
(11),
которая обладает точностью измерения несущей фазы, но без соответствующих неоднозначностей.
Вышеуказанный процесс, описанный в связи с уравнениями (6)-(11), осуществляется для каждого из множества спутников в поле зрения GPS приемника 142 пользователя. При наличии сглаженного измерения кода с поправкой на рефракцию для каждого из множества спутников в поле зрения GPS приемника 142 пользователя могут быть получены псевдодальности для данных спутников. Эти псевдодальности корректируются при помощи поправок WADGPS, полученных из хабов 105, и используются в решении методом взвешенных наименьших квадратов для вычисления вектора состояния х. Таким образом, местоположение, скорость и время (PVT) GPS приемника 142 пользователя могут быть вычислены как решения WADGPS для PVT GPS приемника 142 пользователя.
Другие примеры способов получения сглаженных отклонений с поправкой на рефракцию могут быть найдены в работе Hatch, R. «Синергизм измерений кода и несущей» (The Synergism of Code and Carrier Measurements), труды третьего международного геодезического симпозиума по спутниковым системам определения местоположения с использованием доплеровских измерений, DMA, NOS, Лас-Крусес, шт. Нью-Мексико, Университет штата Нью-Мексико, Том II, стр. 1213-1232, которая включена здесь согласно ссылке, и в патентной заявке «Способ генерирования поправок часов для широкодиапазонной или глобальной дифференциальной системы GPS» (Method for Generating Clock Correction for a Wide-Area or Global Differential GPS System), номер 009792-0042-999, которая также включена здесь согласно ссылке.
Возможно также разрешение величин «плавающей неоднозначности» в виде отдельных состояний с использованием метода наименьших квадратов или фильтра Калмана. Когда неоднозначности включены в виде состояний, оценка для каждой величины плавающей неоднозначности регулируется в соответствии с дисперсией таким образом, что она постепенно становится более точной при изменении геометрии системы вследствие перемещения спутников. Таким образом, данный метод обеспечивает оценку, которая со временем становится все более точной. См. статью Patrick H.C.Hwang «Кинематическая GPS для дифференциальной коррекции определения местоположения: разрешение целочисленных неоднозначностей во время полета» (Kinematic GPS for Differential Positioning: Resolving Integer Ambiguities on the Fly), «Навигация», Том 38, № 1, весна 1991 г., которая включена здесь согласно ссылке.
Существует множество комбинаций и вариантов указанных методов, которые могут быть использованы для оценки величин «плавающей неоднозначности». Однако все они предусматривают обработку данных в течение значительного периода времени. Может потребоваться час или два часа, прежде чем можно стать уверенным в том, что «плавающая неоднозначность» является достаточно точной, чтобы обеспечить точность определения местоположения пользователя 140 менее 10 см. Для сокращения периода времени для получения величин «плавающей неоднозначности» система WADGPS может быть инициализирована, как описано ниже, с использованием известного местоположения GPS приемника 142 пользователя.
Фиг.3А иллюстрирует способ 300 для инициализации системы WADGPS 100. Как показано на Фиг.3А, способ 300 включает этап 310, на котором определяется, находится ли пользователь неподвижно в известном положении. Это можно выполнить на основании входных данных пользователя или посредством известного устройства, которое позволяет компьютеру 144 определить, действительно ли приемник 142 пользователя является неподвижным. Если местоположение приемника 142 пользователя точно известно, то данное местоположение может быть использовано для вычисления величин плавающей неоднозначности без помощи локальной системы 174 определения местоположения и/или локальной системы RTK 150, как более подробно объяснено ниже. Измеренное положение GPS приемника 142 пользователя может быть использовано как известное положение или в некоторых вариантах осуществления положение может быть известно просто потому, что пользователь или объект 140 был неподвижен, и положение пользователя уже было определено во время предварительной операции.
После того как определено, находится ли пользователь неподвижно в известном положении, способ 300 переходит к этапу 320, на котором приемник пользователя устанавливается в известное положение. В противном случае способ 300 переходит к этапу 330, на котором используется локальная система 174 определения местоположения и/или локальная система RTK 150 для автоматической коррекции местоположения пользователя с использованием способа, описанного выше.
Способ 300 также включает этап 340, на котором местоположение приемника пользователя, определенное на этапе 320 или на этапе 330, используется для вычисления множества теоретических дальностей до спутников 110. Это может включать вычисление положений спутников 110 на основе эфемерид, полученных из системы WADGPS 100, и корректировку данных положений посредством коррекций орбит, передаваемых системой WADGPS 100. Учитывая, что местоположение приемника пользователя и местоположения спутников определены в прямоугольных декартовых координатах, теоретическая дальность от пользователя 140 до каждого спутника 110 может быть вычислена следующим образом:
 ,
,
где индекс s обозначает координату спутника, а индекс u обозначает координату приемника пользователя или объекта.
Способ 300 включает также этап 350, на котором начальная величина плавающей неоднозначности a, соответствующая каждому спутнику, вычисляется путем вычитания из вычисленной теоретической дальности дальности, полученной из измерения несущей фазы с поправкой на рефракцию, для одного и того же спутника:
 (12),
(12),
где L 0 RC представляет измерение несущей фазы с поправкой на рефракцию, вычисленное в соответствии с уравнением (7) в начальной эпохе измерений.
Способ 300 включает также этап 360, на котором величины плавающей неоднозначности разрешаются путем сложения начальных величин плавающей неоднозначности с соответствующими измерениями несущей фазы с поправкой на рефракцию в последующих эпохах измерений, т.е.
и путем интерпретации величин плавающей неоднозначности, как хорошо известно, для того обеспечить высокую достоверность (или малое рассогласование). На практике этап 360 осуществляется посредством использования малого усиления для коррекции величин плавающей неоднозначности в процессе для определения величин плавающей неоднозначности. Например, если величины плавающей неоднозначности определяются путем сглаживания отклонения между измерением кода с поправкой на рефракцию и измерением несущей фазы с поправкой на рефракцию в соответствии с уравнением (9), то малое усиление означает интерпретацию величины плавающей неоднозначности, как если бы при вычислении использовалось большое число величин отклонения, так что η = i + (большое число). Если неоднозначная величина определяется с использованием фильтра Калмана, то малое усиление достигается посредством сведения дисперсии неоднозначного состояния к малой величине.
Таким образом, посредством использования известного местоположения неподвижного приемника 142 пользователя, посредством использования локальной системы 174 определения местоположения и/или посредством использования локальной системы RTK 150 для инициализации величин плавающей неоднозначности устраняется обычный период вхождения в синхронизм, занимающий от 15 мин до 2 часов, требующийся для разрешения величин плавающей неоднозначности, когда местоположение приемника пользователя неизвестно. Это может значительно ускорить процесс разрешения неоднозначностей несущей фазы в системе WADGPS 100, делая систему WADGPS 100 более пригодной для определения местоположения и навигации в режиме реального времени.
Для использования локальной системы 174 определения местоположения и/или локальной системы RTK 150 для коррекции местоположения приемника пользователя в способе 300 положение одного или более наземных ориентиров 176 в локальной системе 174 определения местоположения и/или положение базовой станции 120 в локальной системе RTK 150 может быть точно определено в системе WADGPS 100. Обычная локальная система определения местоположения или локальная система RTK может быть использована в относительном смысле, то есть местоположение приемника 142 пользователя может быть определено относительно одного или более наземных ориентиров и/или базового приемника. Таким образом, точные относительные положения GPS приемника 142 пользователя могут быть определены даже в том случае, если абсолютные координаты одного или более наземных ориентиров и/или базовой станции могут или не могут быть особенно точными, и для определения местоположения наземного ориентира и/или базовой станции используются другие данные, отличающиеся от обычных данных GPS. Однако для объединенного использования локальной системы 174 определения местоположения, системы RTK 150 и/или системы WADGPS 100 необходимо определить абсолютное местоположение одного или более наземных ориентиров 176 в локальной системе 174 определения местоположения и базового приемника 120 в системе RTK 150. Если неточное местоположение используется для одного или более наземных ориентиров 176 в локальной системе 174 определения местоположения или базовой станции 120 в локальной системе RTK 150, это приведет к тому, что величины плавающей неоднозначности, вычисленные, как описано выше, будут неточными. Это приведет к медленному отклонению вычисленного местоположения приемника 142 пользователя, поскольку величины плавающей неоднозначности медленно регулируются для коррекции величины в процессе последующей обработки с использованием системы WADGPS.
В одном варианте осуществления настоящего изобретения среднее положение одного или более наземных ориентиров 176 в локальной системе 174 определения местоположения и/или среднее положение базовой станции 120 в системе RTK 150 может быть определено на основе часов данных местоположения из системы WADGPS 100 для повышенной надежности. В альтернативном варианте осуществления компьютер в одном или более наземных ориентирах 176 и/или в базовой станции 120 принимает входную величину оператора за свое положение и обеспечивает определение местоположения пользователя 140. Это позволяет сразу же начать определение относительного локального местоположения и/или местоположения в системе RTK с использованием данного базового местоположения. В то же самое время более точное местоположение одного или более наземных ориентиров 176 и/или базовой станции 120 может быть определено при помощи системы WADGPS 100 и передано в один или более наземных ориентиров 176 и/или в базовую станцию 120. Данное более точное положение или отклонение между входным положением оператора и более точным положением одного или более наземных ориентиров 176 и/или базовой станции 120, определенное при помощи системы WADGPS 100, может передаваться с относительно низкой скоростью пользователю 140.
Фиг.3В иллюстрирует более подробно этап 330 в способе 300, на котором местоположение пользователя корректируется с использованием локальной системы 174 определения местоположения и/или локальной системы RTK 150. Как показано на Фиг.3В, этап 330 включает подэтап 331, на котором пользователь или объект 140 получает входное положение оператора базовой станции 120 в локальной системе 174 определения местоположения и/или системе RTK 150, и подэтап 333, на котором пользователь или объект 140 выполняет операцию локального определения местоположения и/или локальной RTK для определения своего собственного положения относительно положения одного или более наземных ориентиров 176 и/или базовой станции 120. Этап 330 также включает подэтап 335, на котором пользователь или объект 140 получает более точное положение базовой станции 120, определенное при помощи системы WADGP 100, или отклонение между входным положением оператора базовой станции 120 и более точным положением базовой станции 120, определенным при помощи системы WADGP 100. Этап 330 также включает подэтап 337, на котором пользователь или объект 140 вычисляет абсолютное местоположение GPS приемника 142 пользователя в прямоугольных декартовых координатах, используя либо входное положение пользователя наземного ориентира и/или базовой станции, либо местоположение одного или более наземных ориентиров 176 и/или базовой станции 120, определенное при помощи системы WADGPS 100 (при наличии доступа).
Примером, когда преимущества могут быть получены посредством использования способа 300, является определение местоположения поезда. Когда поезд проходит через тоннель, связь с локальной системой определения местоположения, связь с системой RTK и связь с глобальной системой WADGPS отсутствует. В данной ситуации канал передачи данных локальной системы определения местоположения и/или канал передачи данных системы RTK могут быть использованы для инициализации величин плавающей неоднозначности WADGPS, когда поезд выходит из тоннеля. Это устранит длительный период передачи данных, в противном случае необходимый для определения точных величин плавающей неоднозначности.
Другим примером, когда преимущества могут быть получены посредством использования способа 300, является определение местоположения самолета сразу же после взлета. В данном случае локальная система определения местоположения и/или локальная система RTK в аэропорте, где осуществляется подготовка самолета к взлету, могут быть использованы для инициализации неоднозначностей WADGPS либо перед, либо во время взлета.
Таким образом, пользователь или объект 140, который включает GPS приемник 142 и компьютер 144, соединенный с GPS приемником 142 пользователя, может работать как в режиме локального определения местоположения, так и в режиме RTK и/или режиме WADGPS. Локальная система 174 определения местоположения и локальная система RTK 150 являются более предпочтительными по сравнению с системой WADGPS, поскольку процесс поиска для локальной системы 174 определения местоположения и локальной системы RTK 150, как было указано выше, занимает значительно меньше времени, чем способ сглаживания в системе WADGPS 100 для разрешения величин целочисленной неоднозначности. В процессе поиска сглаживание измерений кода либо не требуется, либо сглаживание измерений кода осуществляется гораздо быстрее не для непосредственного определения неоднозначности целого числа циклов, но для обеспечения уменьшенной неопределенности в начальном наборе величин целочисленной неоднозначности, для того чтобы последующий процесс поиска мог быть более жестко ограниченным. Поэтому для получения начального набора величин неоднозначности достаточно всего лишь нескольких секунд.
Однако локальная система 174 определения местоположения и/или локальная система RTK 150 доступны только в таких ситуациях, когда может быть обеспечен канал связи между GPS приемником 142 пользователя и одним или более наземных ориентиров 176 в локальной системе 174 определения местоположения и/или базовой станции 120 в локальной системе RTK 150, и пользователь или объект 140 не отклоняется слишком далеко от одного или более наземных ориентиров 176 в локальной системе 174 определения местоположения и/или базовой станции 120 в локальной системе RTK 150. Если данные условия не удовлетворяются, то есть если локальная система 174 определения местоположения и/или локальная система RTK 150 либо недоступны, либо не обеспечивают требуемую точность, то пользователь может использовать для навигации систему WADGPS 100 посредством использования последнего положения приемника пользователя, определенного при помощи локальной системы 174 определения местоположения и/или системы RTK 150 для инициализации системы WADGPS, для того чтобы устранить длительный период вхождения в синхронизм для получения величин «плавающей неоднозначности».
Фиг.4 иллюстрирует алгоритм процесса 400 для объединенного использования систем локального определения местоположения, RTK и WADGPS, осуществляемого при помощи компьютера 144 пользователя. Алгоритм процесса включает этапы 440, 450 и 460. Как показано на Фиг.4, когда коррекции локальной системы определения местоположения доступны, пользователь 140 работает в режиме локального определения местоположения, а когда доступны поправки системы RTK, пользователь 140 работает в режиме RTK. Пользователь 140 получает положение 401 наземного ориентира/базовой станции 120 в локальной системе 174 определения местоположения и/или локальной системе RTK 150 и осуществляет этап 440, на котором определяются данные PVT приемника пользователя с использованием сигналов коррекции 410 локального определения местоположения/RTK, полученных от наземного ориентира 176 в локальной системе 174 определения местоположения и/или базового приемника 120 в локальной системе RTK 150. При выполнении этапа 440 пользователь 140 может продолжать получать коррекции WADGPS 420 из хабов 105 так, чтобы решения WADGPS могли выдаваться параллельно. Пользователь 140 может также получать скорректированное положение 430 наземного ориентира 176 в локальной системе 176 определения местоположения и/или базовой станции 120 в локальной системе RTK 150 из хаба 105 в относительно низкой скоростью. Используя скорректированное положение наземного ориентира 176 и/или базовой станции 120 и решения систем локального определения местоположения/RTK для определения положения приемника пользователя, при этом параллельно могут непрерывно инициализироваться решения WADGPS для согласования с решениями систем локального определения местоположения/RTK в соответствии со способом 300, рассмотренным выше.
Если коррекции систем локального определения местоположения и RTK недоступны, то пользователь 140 переключается на работу в режиме WADGPS и выполняет этап 450, на котором пользователь 140 использует местоположение приемника пользователя, определенное в режиме локального определения местоположения и/или RTK непосредственно перед тем, как коррекции систем локального определения местоположения/RTK стали недоступными, для инициализации величин плавающей неоднозначности для работы в режиме WADGPS в соответствии со способом 300, рассмотренным выше. Таким образом, величины «плавающей неоднозначности» могут быть определены без длительного периода вхождения в синхронизм. При выполнении этапа 450 пользователь 140 продолжает получать коррекции WADGPS 420 из хабов 105. Пользователь 140 может также получать скорректированное положение 430 одного или более наземных ориентиров 176 в локальной системе определения 174 местоположения и/или базовой станции 120 в локальной системе RTK 150 из хаба 105 с относительно низкой скоростью. Координаты базовой станции используются для преобразования положения приемника пользователя, генерируемого в режиме WADGPS, в положение относительно одного или более наземных ориентиров 176 и/или локального базового приемника 120. Таким образом, данные PVT, генерируемые компьютером 144 пользователя, будут передаваться непрерывно при переходе с одного режима на другой.
Когда коррекции систем локального определения местоположения и/или RTK снова становятся доступными, пользователь возобновляет работу в режиме локального определения местоположения/RTK на этапе 460, которая аналогична работе в режиме локального определения местоположения и/или RTK на этапе 440.
Фиг.4В изображает блок-схему алгоритма, иллюстрирующую последовательность процесса 470 использования локальной системы определения местоположения, локальной системы RTK и/или системы WADGPS. При наличии возможности положение пользователя может быть определено в соответствии с информацией, полученной из локальной системы определения местоположения (этап 480). При наличии возможности положение пользователя может быть определено в соответствии с информацией, полученной из системы RTK (этап 482). При наличии возможности положение пользователя может быть определено в соответствии с информацией, полученной из системы WADGPS (этап 484). Величина плавающей неоднозначности в измерении несущей фазы может быть инициализирована (этап 486). Процесс 470 может включать меньшее или большее количество операций. Возможно объединение двух или более операций и изменение положения, по меньшей мере, одной операции.
В примере осуществления GPS приемник 142 пользователя может работать в первом режиме, который использует локальную систему 176 определения местоположения для определения первого положения пользователя 140, когда обеспечена связь с локальной системой 176 определения местоположения. Второе положение пользователя 140 может быть определено в соответствии с измерениями несущей фазы, выполненными с использованием системы WADGPS 100 во втором режиме работы. Известное положение пользователя 140, такое как первое положение, может быть использовано для инициализации величины плавающей неоднозначности в измерениях несущей фазы. В некоторых вариантах осуществления известное положение пользователя 140 может быть обеспечено и/или введено пользователем.
В некоторых вариантах осуществления при наличии возможности для определения положения пользователя 140 используется первый режим работы. Если связь с локальной системой 174 определения местоположения потеряна, может быть использован второй режим работы. Связь с локальной системой 174 определения местоположения может быть потеряна в том случае, если расстояние до локальной системы 174 определения местоположения превышает некоторую величину, например 100 м, 500 м, 1000 м, 10000 м или более.
В некоторых вариантах осуществления первый режим работы и второй режим работы могут осуществляться по существу одновременно, и разность между первым положением и вторым положением используется для инициализации величины плавающей неоднозначности в измерениях несущей фазы. В некоторых вариантах осуществления первый режим работы и второй режим работы могут осуществляться по существу одновременно, и разность между первым положением и вторым положением используется для определения третьего положения пользователя 140. Третье положение пользователя может соответствовать информации, полученной из локального базового приемника 122 в системе RTK 150 в третьем режиме работы.
В некоторых вариантах осуществления третий режим работы может быть использован, когда связь с локальной системой 174 определения местоположения потеряна, и первый режим работы может быть использован, когда связь с локальной системой 174 определения местоположения снова становится доступной.
В некоторых вариантах осуществления второй режим работы используется, когда связь с локальным базовым приемником 122 и локальной системой 174 определения местоположения потеряна, первый режим работы используется, когда связь с локальной системой 174 определения местоположения является доступной, и третий режим работы используется, когда связь с локальным базовым приемником 122 является доступной, а связь с локальной системой 174 определения местоположения потеряна.
В некоторых вариантах осуществления второй режим работы используется, если расстояние от локальной 174 системы определения местоположения до пользователя 140 больше, чем первая величина (например, 10000 м), первый режим работы используется, если расстояние от локальной системы 174 определения местоположения до пользователя 140 меньше, чем вторая величина (например, 1000 м), и третий режим работы используется, если расстояние от локальной системы 174 определения местоположения до пользователя 140 находится между первой заранее установленной величиной и второй заранее установленной величиной.
Процесс 400 может быть использован во многих приложениях. Одно приложение включает распространение работы локальной системы определения местоположения и/или RTK на зоны, в которых канал связи с локальной системой определения местоположения и/или канал радиосвязи RTK не могут быть обеспечены, но в которых канал связи с WADGPS, по меньшей мере, обычно, является доступным. Например, как показано на Фиг.5, пользователем или объектом 140 может быть сельскохозяйственная машина 510, движущаяся по бороздам 520 на участке 501 холмистых возвышенностей, при этом приемник 142 прикреплен к сельскохозяйственной машине или сельскохозяйственному оборудованию, которое соединено с сельскохозяйственной машиной. Участок 501 включает участок 503, который находится в зоне видимости базовой станции 120 в локальной системе RTK 150, и участки (заштрихованные) 505 и 507, которые находятся вне зоны видимости базовой станции 120. Поскольку в режиме RTK связь обычно осуществляется в прямой видимости, данные RTK будут потеряны всякий раз, когда GPS приемник 142 перемещается из участка 503 на участок 505 или 507. Однако связь между приемником 142 пользователя и системой WADGPS 100 обычно доступна, поскольку она часто обеспечивается при помощи спутников. Путем инициализации плавающих неоднозначностей в системе WADGPS 100, когда канал радиосвязи системы RTK является доступным, и система RTK работает, точность работы в режиме RTK практически может быть сохранена в периоды времени, когда связь с RTK потеряна.
Хотя в вышеприведенном описании на Фиг.1 использована система WADGPS 100, необходимо понимать, что любая региональная, широкодиапазонная или глобальная система, которая использует измерения несущей фазы сигналов от спутников для обеспечения определения местоположения и навигации и, таким образом, требует определения величин неоднозначностей, связанных с измерениями фазы, может также получить преимущества от использования способа 300, описанного выше. Примеры таких систем включают StarfireTM System разработки John Deere Company и региональную национальную дифференциальную систему GPS высокой точности (High Accuracy-National Differential - HA-ND), разработанную несколькими правительственными агентствами США.
Изобретение относится к объединенному использованию локальной системы (174) определения местоположения, локальной системы RTK (150) и региональной, широкодиапазонной или глобальной дифференциальной системы (100) определения местоположения с измерениями несущей фазы (WADGPS). Достигаемый технический результат - устранение недостатков, связанных с методами навигации с раздельным использованием локальной системы (174) определения местоположения, системы RTK (150) и системы WADGPS (100). Способ включает использование известного положения приемника (142) пользователя, который является неподвижным, или использование системы RTK (150) для инициализации величин плавающей неоднозначности в системе WADGPS (100), когда приемник (142) пользователя перемещается. Затем измерения несущей фазы с поправкой на рефракцию, полученные в GPS приемнике (142) пользователя, корректируются путем включения соответствующих начальных величин плавающей неоднозначности, и величины плавающей неоднозначности обрабатываются известным способом (для достижения малой дисперсии) в последующих процессах для определения положения приемника (142) пользователя в системе WADGPS (100). 3 н. и 12 з.п. ф-лы, 6 ил.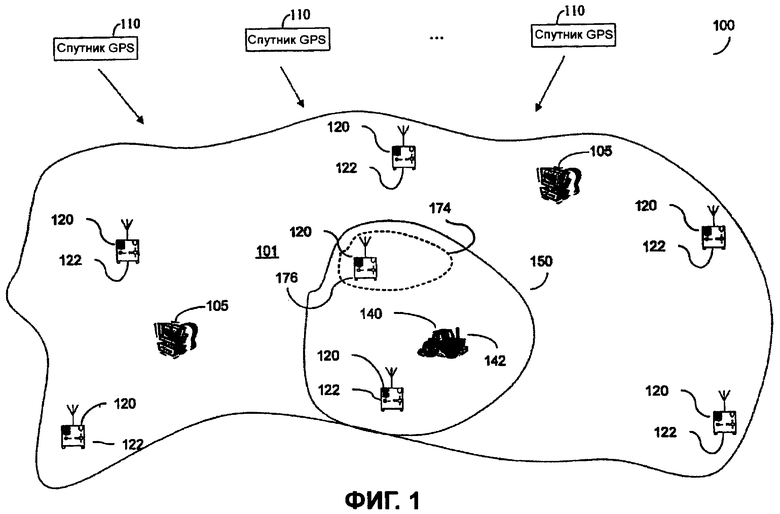
1. Способ определения местоположения или навигации объекта, связанного как с локальной системой определения местоположения, так и с широкодиапазонной дифференциальной спутниковой системой определения местоположения, содержащий этапы, на которых:
определяют первое положение объекта в соответствии с измерениями фазы несущей с использованием широкодиапазонной дифференциальной спутниковой системы определения местоположения в первом режиме работы; и
определяют второе положение объекта в соответствии с информацией, полученной из локальной системы определения местоположения во втором режиме работы;
при этом первый режим и второй режим используются по существу одновременно, и разница между вторым положением и первым положением используется для инициализации величины плавающей неоднозначности в измерениях фазы несущей.
2. Способ по п.1, в котором известное положение объекта используется для инициализации другой величины плавающей неоднозначности в измерениях несущей фазы.
3. Способ по п.2, в котором известным положением объекта является второе положение.
4. Способ по п.2, в котором известным положением объекта является информация, вводимая пользователем.
5. Способ по п.1, в котором второй режим работы используется при наличии связи с локальной системой определения местоположения.
6. Способ по п.1, в котором первый режим работы используется тогда, когда связь с локальной системой определения местоположения потеряна, и второй режим работы используется тогда, когда связь с локальной системой определения местоположения снова становится доступной.
7. Способ по п.1, в котором второй режим работы используется в том случае, если расстояние от локальной системы определения местоположения до объекта меньше заранее установленной величины.
8. Способ по п.1, в котором первый режим работы используется в том случае, если связь с локальной системой определения местоположения потеряна.
9. Способ по п.1, в котором первый и второй режимы работы используются по существу одновременно, и разность между вторым положением и первым положением используется для определения третьего положения объекта.
10. Способ по п.1, дополнительно содержащий этап, на котором определяют третье положение объекта в соответствии с информацией, полученной из локального базового приемника с использованием определения местоположения в режиме кинематики реального времени, в третьем режиме работы.
11. Способ по п.10, в котором третий режим работы используется тогда, когда связь с локальной системой определения местоположения потеряна, и второй режим работы используется тогда, когда связь с локальной системой определения местоположения снова становится доступной.
12. Способ по п.10, в котором первый режим работы используется тогда, когда связь с локальным базовым приемником и локальной системой определения местоположения потеряна, второй режим работы используется тогда, когда связь с локальной системой определения местоположения доступна, и третий режим работы используется тогда, когда связь с локальным базовым приемником доступна, а связь с локальной системой определения местоположения потеряна.
13. Способ по п.10, в котором первый режим работы используется в том случае, если расстояние от локальной системы определения местоположения до объекта больше первой заранее установленной величины, второй режим работы используется в том случае, если расстояние от локальной системы определения местоположения до объекта меньше второй заранее установленной величины, и третий режим работы используется в том случае, если расстояние от локальной системы определения местоположения до объекта находится в интервале между первой заранее установленной величиной и второй заранее установленной величиной.
14. Приемник спутниковой навигации, выполненный с возможностью работы в первом режиме и втором режиме работы, причем в первом режиме работы первое положение объекта определяется в соответствии с измерениями фазы несущей с использованием широкодиапазонной дифференциальной спутниковой системы определения местоположения, и во втором режиме работы второе положение объекта определяется в соответствии с информацией, получаемой из локальной системы определения местоположения; при этом первый режим и второй режим используются по существу одновременно, и разница между вторым положением и первым положением используется для инициализации величины плавающей неоднозначности в измерениях фазы несущей.
15. Приемник спутниковой навигации, содержащий интегральную схему, выполненную с возможностью выполнения:
операций определения первого положения объекта в соответствии с измерениями фазы несущей с использованием широкодиапазонной дифференциальной спутниковой системы определения местоположения в первом режиме работы; и
операций определения второго положения объекта с использованием локальной системы определения местоположения во втором режиме работы;
при этом первый режим и второй режим используются по существу одновременно, и разница между вторым положением и первым положением используется для инициализации величины плавающей неоднозначности в измерениях фазы несущей.
| US 2005151683 A1, 14.07.2005 | |||
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| ПРИЕМНИК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ СЕТЕЙ СПУТНИКОВОЙ СВЯЗИ | 1996 |
|
RU2158935C2 |
| СИСТЕМА, СПОСОБ И ПОЛЬЗОВАТЕЛЬСКИЙ ТЕРМИНАЛ В СИСТЕМЕ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ДВУХ СПУТНИКОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 1997 |
|
RU2256935C2 |
| US 6531981 B1, 11.03.2003 | |||
| Устройство для измерения длины кабеля | 1988 |
|
SU1580570A1 |

