Область техники
Настоящее изобретение относится к системам связи. В частности, настоящее изобретение относится к системам и способам определения положения беспроводного передатчика в системе множественного доступа с кодовым разделением каналов.
Предшествующий уровень техники
Развертыванию технологий определения местонахождения в беспроводных сетях способствуют органы власти и стремление поставщиков коммуникационных услуг к увеличению доходов за счет расширения спектра предоставляемых услуг по сравнению с конкурентами. Кроме того, в июне 1996 г. Федеральная комиссия по связи (ФКС) издала документ в поддержку расширения экстренной службы 911 (Е-911). Часть I Инструкции требует, чтобы на ППВОБ (Пункт Приема Вызовов службы Общественной Безопасности) поступала информация о секторе и ячейке сотовой связи. Часть II Инструкции требует, чтобы ППВОБ сообщалось местонахождение сотового приемопередатчика. Во исполнение инструкции ФКС узлы связи, общим количеством 77000, к 2005 году должны быть оборудованы средствами автоматического определения местонахождения.
Существует много способов обеспечения возможности автоматического определения местонахождения. Один из таких способов предусматривает измерение разницы по времени поступления сигналов от нескольких узлов сотовой связи. Для извлечения информации по местонахождению производится обработка этих сигналов методом триангуляции. К сожалению, чтобы этот способ был эффективен, требуется высокая концентрация узлов сотовой связи и/или повышение передаваемой мощности узлов сотовой связи. Причина в том, что в обычной системе МДКР каждый телефон передает сигнал с мощностью, достаточной только для достижения ближайшего узла сотовой связи. Поскольку для триангуляции требуется связь, по меньшей мере, с тремя станциями, пришлось бы увеличить концентрацию узлов сотовой связи или повысить мощность сигнала каждого беспроводного блока.
В любом случае, каждый известный метод имеет значительные недостатки. Увеличение количества узлов сотовой связи потребовало бы чрезмерных затрат. Увеличение мощности сигнала привело бы к увеличению веса и стоимости каждого беспроводного блока и к повышению вероятности взаимных помех между беспроводными блоками. Кроме того, метод триангуляции не обеспечивает точность, требуемую инструкцией ФКС.
Другой подход предусматривает придание сотовому телефону функциональных возможностей ГСП (Глобальной Системы Позиционирования). Хотя осуществление этого подхода сопряжено со значительным увеличением стоимости и веса беспроводного блока, необходимостью наличия четырех спутников в зоне прямой видимости, а также некоторым замедлением работы, он обеспечивает наибольшую точность для поддержки услуг определения местонахождения.
Третий подход предусматривает, в целях ускорения процесса, передачу на беспроводный блок вспомогательной информации, указывающей, на каких частотах беспроводной блок должен искать несущие ГСП. Для минимизации осуществляемого приемником поиска сигнала видимого спутника в частотной области в большинстве приемников ГСП используется так называемый каталог спутников ГСП. Каталог представляет собой 15000-битовый блок грубых эфемерид и данных временной модели для всего созвездия. Информация в каталоге, касающаяся положения спутника и времени суток, является всего лишь приблизительной. В отсутствие каталога приемник ГСП, чтобы обнаружить сигнал спутника, должен проводить поиск в возможно более широком диапазоне частот. Для получения дополнительной информации, способствующей обнаружению других спутников, требуется дополнительная обработка.
Процесс обнаружения сигнала может занимать несколько минут по причине большого количества элементов разрешения по частоте, по которым надлежит производить поиск. Каждый элемент разрешения по частоте имеет среднюю частоту и заданную ширину. Наличие каталога снижает неопределенность доплеровской частоты спутника и, следовательно, количество элементов разрешения по частоте, по которым надлежит производить поиск.
Спутниковый каталог можно извлекать из навигационного сообщения ГСП или получать по нисходящей (прямой) линии связи в качестве информационного или сигнального сообщения, посылаемого на приемник. Получив эту информацию, приемник осуществляет обработку сигнала ГСП с целью определения своего местонахождения. Хотя этот подход может обеспечивать несколько более высокое быстродействие, его недостаток заключается в том, что для его реализации требуется наличие в зоне прямой видимости, по меньшей мере, четырех спутников. В городских условиях это может быть проблемой.
Таким образом, существует необходимость в системе или способе быстрого, точного и экономичного определения местонахождения сотового телефона.
Сущность изобретения
Для решения указанной задачи настоящего изобретения предлагаются система и способ определения положения беспроводного приемопередатчика. В наиболее широком аспекте способ, соответствующий изобретению, представляет собой смешанный подход к определению положения с использованием информации по дальности от наземной системы, информации по хронированию от беспроводного блока и информации по дальности от спутников ГСП. Эта информация объединяется для обеспечения быстрого и надежного определения положения беспроводного блока. Способ, соответствующий изобретению, включает в себя этапы приема в беспроводном блоке первого сигнала, передаваемого с первого спутника ГСП, второго сигнала, передаваемого со второго спутника ГСП, и третьего сигнала от третьего спутника. Беспроводный блок выполнен с возможностью приема этих сигналов ГСП, а также передачи, в ответ на них, четвертого сигнала к базовой станции. Базовая станция принимает четвертый сигнал, корректирует смещение часов, привнесенное в четвертый сигнал за счет задержки двустороннего прохождения сигналов между базовой станцией и беспроводным блоком, и использует скорректированный четвертый сигнал для вычисления положения беспроводного блока.
Согласно конкретному варианту реализации базовая станция передает к беспроводному блоку вспомогательную информацию. Вспомогательная информация используется беспроводным блоком для быстрого обнаружения сигналов, передаваемых первым, вторым и третьим спутниками. Вспомогательные сигналы формируют из информации, полученной в приемопередающей подсистеме базовой станции (ППБС), обслуживающей беспроводный блок, и включают в себя информацию идентификации спутника, информацию доплеровского сдвига и значения, указывающие расстояние между базовой станцией и каждым спутником и размер окна поиска, связанного с каждым спутником, причем размер окна поиска вычисляется на основании задержки двустороннего прохождения сигналов между беспроводным блоком и базовой станцией и угла места каждого спутника.
После обнаружения сигналов, передаваемых первым, вторым и третьим спутниками, беспроводный блок вычисляет дальность от беспроводного блока до каждого из спутников, pm1, pm2 и pm3 соответственно. Эта информация по дальности передается обратно на базовую станцию совместно с информацией, относящейся к времени, когда было произведено измерение. В варианте реализации МДКР время, когда беспроводный блок передает на базовую станцию четвертый сигнал, известно в базовой станции. Задержка в приеме четвертого сигнала указывает базовой станции расстояние между беспроводным блоком и базовой станцией. Кроме того, задержка обеспечивает средство корректировки абсолютного времени беспроводного блока.
Устройство, внешнее по отношению к мобильному устройству, например, контроллер базовых станций или какой-либо иной объект, связанный с инфраструктурой сотовой системы, использует информацию, известную обслуживающей базовой станции, например, ее положение, положение первого, второго и третьего спутников относительно беспроводного блока и расстояние между беспроводным блоком и базовой станцией для вычисления положения беспроводного блока. Это делается путем нахождением пересечения первой сферы радиуса ср1 с центром в первом спутнике, второй сферы радиуса ср2 с центром во втором спутнике и третьей сферы радиуса ср3 с центром в третьем спутнике и четвертой сферы радиуса cpb с центром в базовой станции, где с - скорость света, р1 - псевдодальность, связанная с первым спутником и беспроводным блоком, р2 - псевдодальность, связанная со вторым спутником и беспроводным блоком, и р3 - псевдодальность, связанная с третьим спутником и беспроводным блоком.
Заметим, что, если между беспроводным блоком и базовой станцией существует зона прямой видимости (в отсутствие многолучевого распространения), то согласно предложенному подходу требуются измерения, связанные только с двумя спутниками и с одной базовой станцией. Дополнительная информация от еще одной базовой станции, если таковая имеется, может использоваться для дальнейшего снижения количества требуемых спутников. Кроме того, в тех случаях, когда необходимо определять только двумерное положение, используются только два спутника и одна базовая станция.
Важным преимуществом этого подхода по сравнению с другими известными подходами с использованием ГСП является быстродействие определения псевдодальности беспроводным блоком. Поскольку обслуживающая базовая станция имеет собственный приемник ГСП, а также знает псевдодальности всех отслеживаемых спутников относительно местоположения обслуживающей базовой станции, можно определять центр окна поиска и размер окна поиска для каждого отслеживаемого спутника. Информация направляется на беспроводный блок для повышения быстродействия процесса поиска.
Таким образом, бортовые часы каждого спутника ГСП управляют хронированием широковещательной передачи спутником сигнала определения дальности. Такие часы синхронизированы с системным временем ГСП. Базовая станция также содержит часы, синхронизированные с системным временем ГСП. Беспроводный блок синхронизирует свои часы с временем в системе ГСП с задержкой, соответствующей задержке одностороннего прохождения сигнала между базовой станцией и беспроводным блоком. Информация хронирования вводится в сигнал определения дальности спутника, что позволяет беспроводному блоку вычислять, когда был передан сигнал с конкретного спутника. Зарегистрировав время, когда был принят сигнал, можно вычислить расстояние (дальность) от спутника до беспроводного блока. В результате геометрическое место точек местонахождения беспроводного блока представляет собой сферу с центром, соответствующим местоположению спутника, и радиусом, равным вычисленной дальности. Если измерение одновременно производится с использованием определения дальности еще двух спутников, то беспроводный блок оказывается на поверхности трех сфер. Три сферы пересекаются в двух точках, однако только одна из точек дает правильное положение беспроводного пользователя. Предположительные положения зеркально симметричны друг другу относительно плоскости, проходящей через три спутника.
В наилучшем варианте осуществления изобретение обеспечивает идентификацию в базовой станции трех "наилучших" спутников ГСП для определения местонахождения беспроводного блока в данный момент времени. Эта информация передается к беспроводному блоку для облегчения операции поиска, осуществляемой беспроводным блоком.
Согласно одному варианту осуществления беспроводный блок может работать в нескольких режимах:
(1) Смешанный режим, предусматривающий использование информации как от инфраструктуры беспроводной системы, так и спутников ГСП;
(2) Автономный (стандартный или общепринятый) режим ГСП;
(3) Автономный режим ГСП с поддержкой;
(4) Инверсно-дифференциальный режим ГСП; и
(5) Инверсно-дифференциальный режим ГСП с поддержкой.
Краткое описание чертежей
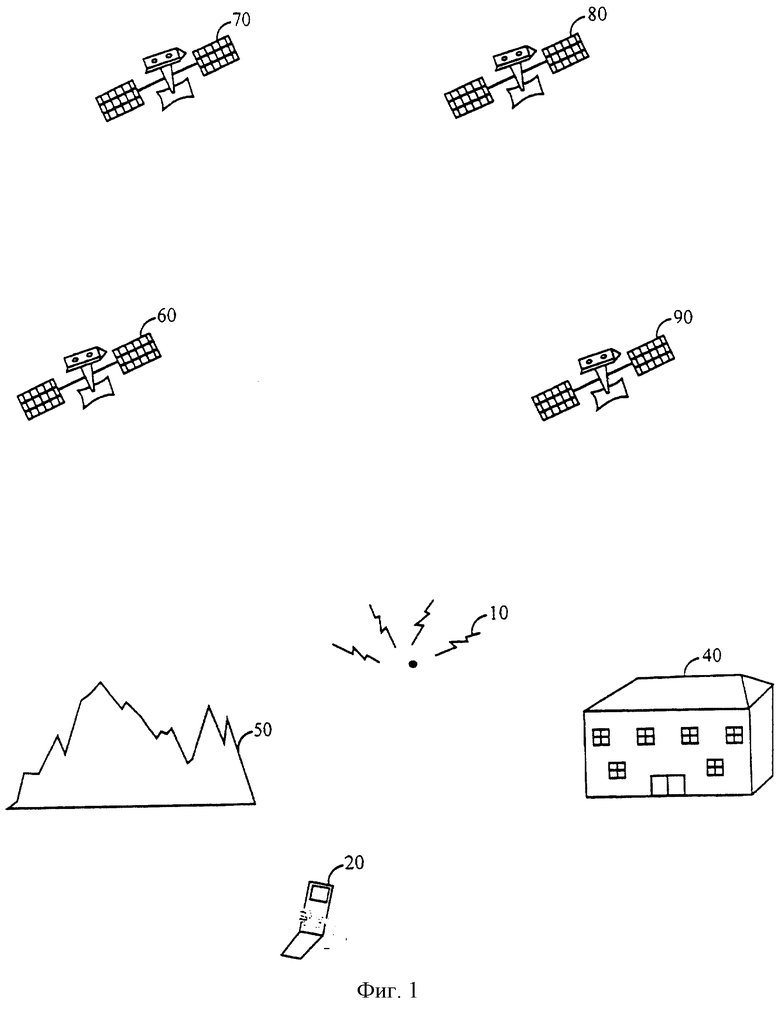
Фиг. 1 - схема иллюстративного варианта осуществления базовой станции и беспроводного блока системы беспроводной связи (МДКР).
Фиг. 2 - блок-схема иллюстративной сотовой телефонной системы МДКР.
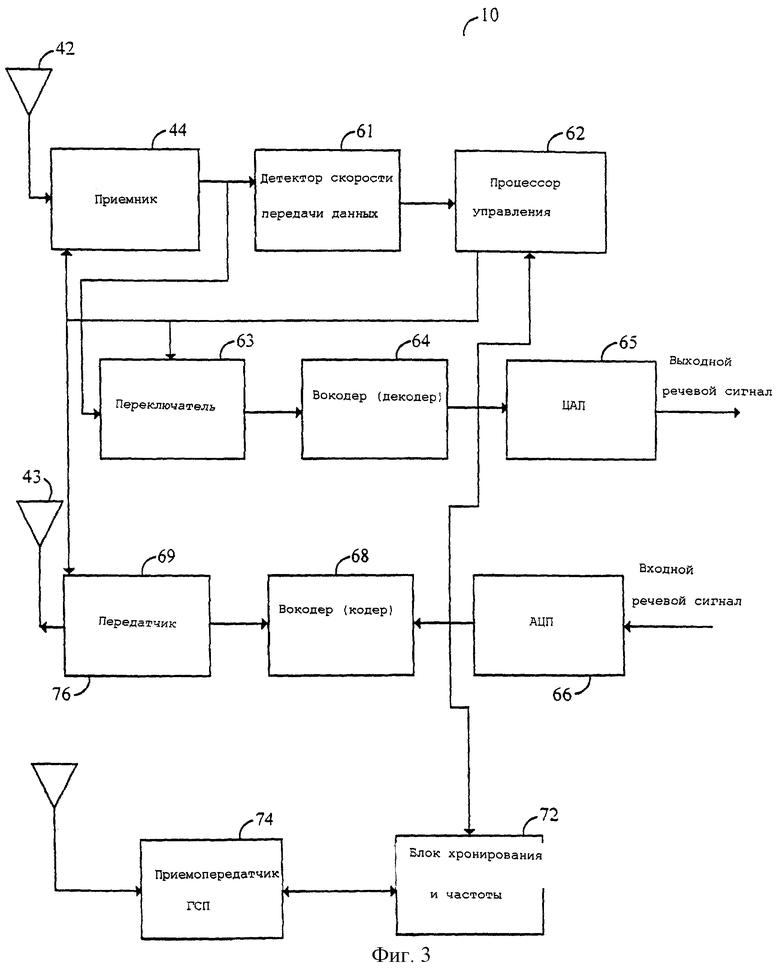
Фиг. 3 - упрощенная схема базовой станции, выполненной в соответствии с принципами настоящего изобретения.
Фиг. 4 - блок-схема беспроводного блока системы определения положения беспроводного приемопередатчика МДКР, соответствующего настоящему изобретению.
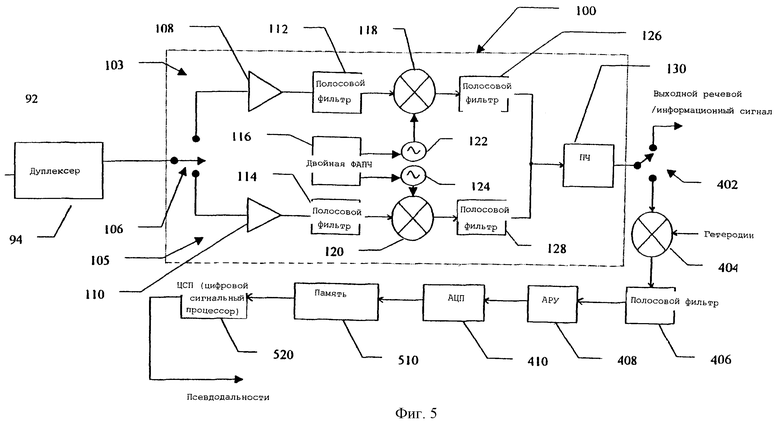
Фиг. 5 - блок-схема иллюстративного варианта осуществления приемного тракта, электронных схем интерфейса управляющего сигнала, цифровой ПЧ и беспроводного демодулятора беспроводного блока, соответствующего настоящему изобретению.
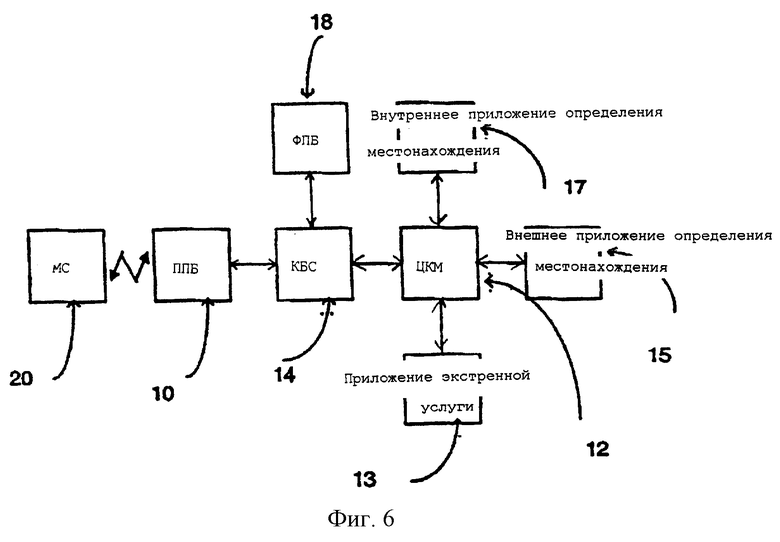
Фиг. 6 - иллюстрация функциональной модели определения местонахождения беспроводного блока.
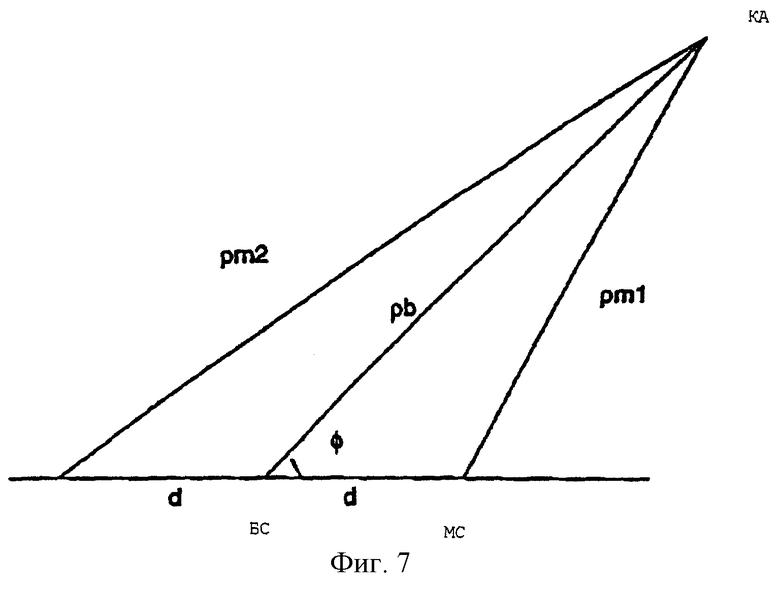
Фиг. 7 - геометрическое представление вычисления размера и центра окна поиска во временной области.
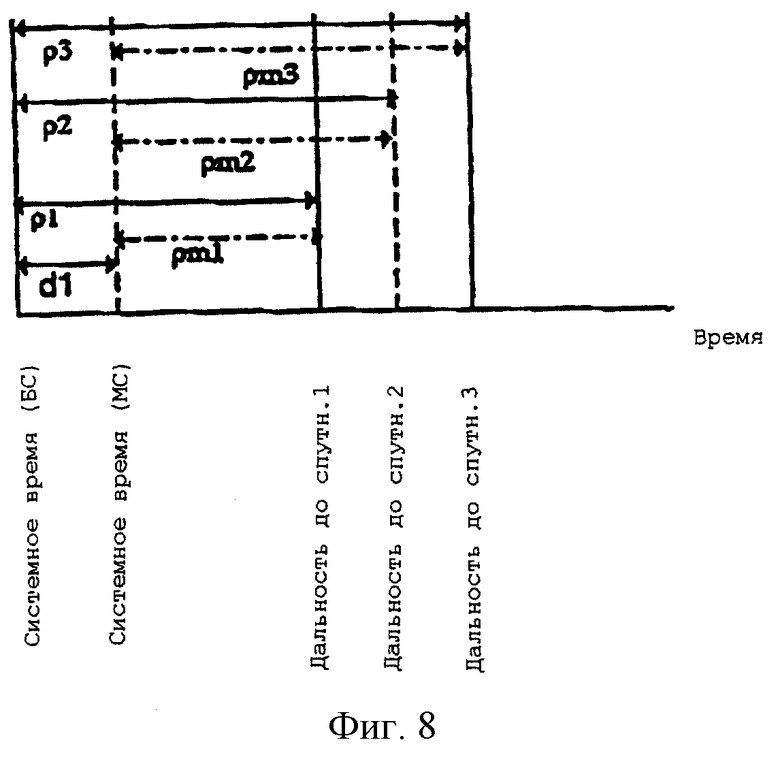
Фиг. 8 -диаграмма, иллюстрирующая коррекцию сдвига локальных часов.
Подробное описание изобретения
Ниже приведено описание иллюстративных вариантов осуществления со ссылками на прилагаемые чертежи.
Хотя настоящее изобретение описано здесь со ссылками на приведенные для примера варианты осуществления для конкретных применений, следует иметь в виду, что изобретение не ограничивается ими. Для специалистов в данной области на основе изложенных принципов изобретения очевидны модификации, применения и варианты осуществления и дополнительные области применения, в которых настоящее изобретение могло бы обеспечить преимущества.
На фиг. 1 изображена схема, иллюстрирующая базовую станцию 10 и беспроводный блок 20 системы беспроводной связи (МДКР). Система связи окружена зданиями 40 и наземными препятствиями 50. Базовая станция 10 и беспроводный блок 20 находятся в среде ГСП (Глобальной Системы Позиционирования), имеющей несколько спутников ГСП, из которых показано четыре: 60, 70, 80 и 90. Подобные среды ГСП общеизвестны. См., например, Hofmann-Wellenhof, В., et al., GSP Theory and Practice, Second Edition, New-York, NY: Springer-Verlag Wien, 1993. Специалистам в данной области очевидно, что принципы настоящего изобретения можно применять и к другим системам связи, например, Усовершенствованной системе мобильной радиотелефонной связи [AMPS], Глобальной Системе Мобильной связи [GSM] и т.д. без изменения объема настоящего изобретения.
В типичном применении с использованием ГСП для того, чтобы приемник ГСП мог определить свое положение, требуется, по меньшей мере, четыре спутника. Однако настоящее изобретение предусматривает способ и устройство для определения положения беспроводного блока 20 с использованием только трех спутников ГСП, задержки двустороннего прохождение сигналов от беспроводного блока до обслуживающей базовой станции 10 и известного местонахождения обслуживающей базовой станции 10. При наличии связи в зоне прямой видимости для определения местонахождения беспроводного блока 20 требуется только два спутника ГСП, задержка двустороннего прохождения сигналов и известное местонахождение обслуживающей базовой станции 10.
На фиг. 2 приведена блок-схема сотовой телефонной системы 30 МДКР. Система 30 включает в себя центр коммутации мобильной связи (ЦКМ) 12, имеющий контроллер базовых станций (КБС) 14. Телефонная сеть общего пользования (ТСОП) 16 маршрутизирует вызовы из телефонных линий и иных сетей (не показаны) к ЦКМ 12 и обратно. ЦКМ 12 маршрутизирует вызовы из ТСОП 16 к исходной базовой станции 10, связанной с первой ячейкой 19, и к целевой базовой станции 11, связанной со второй ячейкой 21, и обратно. Кроме того, ЦКМ 12 маршрутизирует вызовы между базовыми станциями 10, 11. Исходная базовая станция 10 направляет вызовы к первому беспроводному блоку 20, находящемуся в первой ячейке 19, по первому маршруту 28 связи. Маршрут 28 связи представляет собой двунаправленную линию связи, имеющую прямую линию 31 связи и обратную линию 32 связи. Обычно, если базовая станция 10 установила речевую связь с беспроводным блоком 20, линия 28 связи включает в себя канал графика. Хотя каждая базовая станция 10, 11 связана только с одной ячейкой, контроллер базовых станций часто управляет или связан с базовыми станциями в нескольких ячейках.
Когда беспроводный блок 20 перемещается из первой ячейки 19 во вторую ячейку 21, беспроводный блок 20 начинает устанавливать связь с базовой станцией, связанной со второй ячейкой. Это обычно именуется “переключением” на целевую базовую станцию 11. При “мягком” переключении беспроводный блок 20 устанавливает вторую линию 34 связи с целевой базовой станцией 11 в дополнение к первой линии 28 связи с исходной базовой станцией 10. После перехода беспроводного блока 20 во вторую ячейку и установления линии связи со второй ячейкой беспроводный блок может разорвать первую линию 28 связи.
При жестком переключении работа исходной и целевой базовых станций обычно отличается тем, что линия 34 связи с исходной базовой станцией должна быть разорвана до того, как можно будет установить линию связи с целевой базовой станцией. Например, если исходная базовая станция принадлежит системе МДКР, использующей первую полосу частот, а целевая базовая станция принадлежит второй системе МДКР, использующей вторую полосу частот, беспроводный блок не может одновременно поддерживать линии связи с обеими базовыми станциями, поскольку большинство беспроводных блоков не имеет возможности настраиваться одновременно на две различные полосы частот. При перемещении первого беспроводного блока 20 из первой ячейки 19 во вторую ячейку 21 линия 28 связи с исходной базовой станцией 10 прерывается, и создается новая линия связи с целевой базовой станцией 11.
На фиг. 3 иллюстративно представлена в упрощенном виде базовая станция 10, выполненная в соответствии с принципами настоящего изобретения. Согласно варианту осуществления, представленному на фиг. 3, базовая станция 10 является, по существу, общепринятой. Согласно альтернативному варианту осуществления базовая станция 10 содержит дополнительные функциональные возможности, которые позволяют базовой станции определять положение беспроводного блока 20, как представлено в нижеприведенном описании. Обычная базовая станция 10 включает в себя приемную антенну 42 МДКР для приема сигналов МДКР и передающую антенну МДКР для передачи сигналов МДКР. Сигналы, принимаемые антенной 42, направляются в приемник 44. На практике приемник 44 содержит демодуляторы, обращенные перемежители, декодеры и другие схемы, что очевидно специалисту в данной области техники. Принятый сигнал подается в соответствующий канал, с которым связан детектор 60 скорости передачи данных. Процессор 62 управления использует скорость передачи данных детектируемого сигнала для детектирования речи. Если процессор 62 управления детектирует речь в принятом кадре, то он коммутирует принятый кадр на вокодер 64 через переключатель 63. Вокодер 64 декодирует сигнал, кодированный с переменной скоростью, и выдает оцифрованный выходной сигнал. Оцифрованный декодированный речевой сигнал преобразуется в речь посредством цифроаналогового преобразователя 65 и выходного устройства, например громкоговорителя (не показан).
Входной речевой сигнал, поступающий от микрофона или иного входного устройства (не показано), преобразуется в цифровую форму посредством аналого-цифрового преобразователя 66 и кодируется вокодером 68. Кодированный речевой сигнал поступает в передатчик 69. На практике передатчик 69 включает в себя модуляторы, перемежители и кодеры, что очевидно специалисту в данной области техники. Выходной сигнал передатчика 69 подается в передающую антенну 43.
Обычная базовая станция 10 также имеет антенну ГСП 76, приемник 74 и блок 72 хронирования и частоты. Блок хронирования и частоты принимает сигналы от ГСП-процессора приемника ГСП и использует их для генерирования опорных сигналов хронирования и частоты для надлежащей работы системы МДКР. Соответственно во многих подобных системах МДКР каждый узел сотовой связи использует опорный сигнал времени системы ГСП, из которого получают все критичные по времени передаваемые сигналы МДКР (включая последовательности пилот-сигнала, кадры и функции Уолша). Такие общепринятые блоки хронирования и частоты и ГСП-процессоры обыкновенно используются в системах МДКР и широко известны в технике. Общепринятые блоки хронирования и частоты выдают импульсы частоты и информацию по хронированию. Однако блок 72 хронирования и частоты, соответствующий настоящему изобретению, предпочтительно выдает также угол места, псевдодальность, идентификацию спутника (т.е. сдвиг псевдошумовой (ПШ) по-следовательности, связанный с каждым спутником) и доплеровский сдвиг, связанный с каждым спутником, что способствует обнаружению спутников беспроводным блоком 20 (т.е. сокращает время обнаружения спутника). Эта информация обычно имеется в общепринятых блоках хронирования и частоты, но обычно не требуется внешним устройствам и не подается на них. Дополнительная информация, выдаваемая блоком 72 хронирования и частоты, предпочтительно передается в КБС 14 аналогично тому, как это имеет место для информации частоты и хронирования в общепринятой базовой станции.
Фиг. 4 представляет собой блок-схему беспроводного блока 20, выполненного в соответствии с одним из вариантов осуществления настоящего изобретения. Беспроводный блок 20 предпочтительно включает в себя двунаправленную антенну 92, обеспечивающую прием как передаваемых сигналов МДКР, так и сигналов ГСП. Согласно альтернативному варианту осуществления настоящего изобретения для приема и передачи сигналов ГСП, сигналов МДКР и других сигналов, например сигналов альтернативной системы, можно использовать раздельные антенны. Антенна 92 предпочтительно подает сигнал на дуплексер 94. Дуплексер 94 предпочтительно подает сигнал на приемник 100 и предпочтительно получает сигнал от передатчика 200. Частотно-временная подсистема 102 выдает аналоговые и цифровые опорные сигналы для приемника 100, интерфейса управляющего сигнала 300 и передатчика 200, что очевидно для специалистов в данной области техники. Управление мощностью сигнала МДКР обеспечивается посредством схемы регулировки усиления 104. Согласно одному из вариантов осуществления настоящего изобретения интерфейс управляющего сигнала 300 представляет собой цифровой сигнальный процессор (ЦСП).
Альтернативно интерфейс управляющего сигнала может представлять собой другую схему, способную осуществлять функции регулировки усиления. Интерфейс управляющего сигнала 300 выдает управляющие сигналы для беспроводного блока 20. Приемник 100 обеспечивает преобразование с понижением частоты высокочастотного (ВЧ) сигнала и первый этап преобразования с понижением частоты сигнала промежуточной частоты (ПЧ). Специализированная интегральная схема (СИС) 400 цифровой обработки ПЧ обеспечивает второй этап преобразования с понижением частоты ПЧ-сигнала в полосу частот модулирующего сигнала, дискретизацию и А/Ц-преобразование. СИС 500 мобильного демодулятора производит поиск и корреляционную обработку цифровых данных в полосе частот модулирующего сигнала, поступающих от СИС цифровой обработки ПЧ, для получения псевдодальностей, что обсуждается более подробно ниже.
Псевдодальности вместе с любым речевым сигналом или данными подаются демодулятором 500 на цифровой ПЧ-модулятор 400. Цифровой ПЧ-модулятор 400 обеспечивает первый этап преобразования с повышением частоты на ПЧ данных, полученных от демодулятора 500. Второй этап преобразования с повышением частоты на ПЧ и преобразование с повышением частоты на ВЧ этих сигналов обеспечивается схемой передатчика 200. Затем эти сигналы передаются на базовую станцию 10 и обрабатываются в соответствии со способом, соответствующим изобретению, как описано ниже. Следует заметить, что информация местоположения, подлежащая передаче между беспроводным блоком 20 и КБС 14, например псевдодальности, принимаемые беспроводным блоком 20, предпочтительно передается беспроводным блоком 20 к базовой станции 10 посредством сообщения пакетного типа, примером которых могут служить сообщения службы коротких сообщений, определенные промышленным стандартом TIA/EIA/IS-167, установленным Ассоциацией производителей средств связи. Такие сообщения передаются через базовую станцию 10 в КБС 14. Альтернативно заново определенное сообщение пакетного типа может передаваться беспроводным блоком 20 к базовой станции 10.
На фиг. 5 представлена блок-схема примера осуществления приемного тракта, электронных схем интерфейса управляющего сигнала, цифровой обработки ПЧ и демодулятора беспроводного блока 20, соответствующего настоящему изобретению. Передающий тракт беспроводного блока 20 по существу идентичен передающему тракту обычного беспроводного блока и потому, для краткости, здесь не рассматривается. Согласно предпочтительному варианту осуществления приемник 100 содержит первый и второй каналы соответственно 103 и 105, которые подключены к антенне 92 через дуплексер 94 посредством первого переключателя 106. Специалистам должно быть ясно, что возможна более высокая степень интеграции между устройством дуплексной связи и приемником ГСП. Альтернативно для достижения целей настоящего изобретения можно использовать два отдельных приемника с соответствующим интерфейсом.
Первый канал 103 преобразует с понижением частоты принятые ВЧ сигналы МДКР и выдает обычные выходные сигналы МДКР, преобразованные с понижением частоты. Первый канал 103 включает в себя малошумящий усилитель 108, первый полосовой фильтр 112, первый смеситель 118 и второй полосовой фильтр 126. Второй канал 105 преобразует с понижением частоты сигналы ГСП, приходящие со спутников ГСП 60, 70, 80 и 90, изображенных на фиг. 1. Второй канал 105 включает в себя второй малошумящий усилитель 110, который выдает сигнал на третий полосовой фильтр 114. Выходной сигнал полосового фильтра 114 поступает на второй смеситель 120. Выходной сигнал второго смесителя поступает на четвертый полосовой фильтр 128. На первый и второй смесители поступает сигнал соответственно от первого и второго гетеродинов 122 и 124. Первый и второй гетеродины 122 и 124 работают на разных частотах под управлением двойной схемы фазовой автоподстройки частоты (ФАПЧ) 116. Двойная ФАПЧ гарантирует, что каждый гетеродин 122 и 124 обеспечивает опорную частоту для преобразования с понижением частоты как принятого сигнала МДКР, в случае первого смесителя 118, так и принятого сигнала ГСП, в случае второго смесителя 120. Выходные сигналы второго и четвертого полосовых фильтров 126 и 128 поступают на первый ПЧ-каскад 130, имеющий обычную структуру.
Выходной сигнал ПЧ-демодулятора 130 поступает на второй переключатель 402 в СИС 400 цифровой обработки ПЧ. Первый и второй переключатели 106 и 402 работают под управлением интерфейса управляющего сигнала 300 для направления принятого сигнала на выходную обработку речевого сигнала или данных в обычном режиме МДКР или на обработку соответствующего системе ГСП посредством третьего смесителя 404 пятого полосового фильтра 406, схемы автоматической регулировки усиления 408 и аналого-цифрового преобразователя 410. Второй входной сигнал третьего смесителя 404 представляет собой выходной сигнал гетеродина. Смеситель 404 преобразует полученный сигнал в полосу частот модулирующего сигнала. Отфильтрованный, отрегулированный по усилению сигнал подается на аналого-цифровой преобразователь (АЦП) 410. Выходной сигнал АЦП 410 включает в себя первый цифровой поток синфазной составляющей (I) и второй цифровой поток квадратурной составляющей (Q). Эти оцифрованные сигналы поступают на цифровой сигнальный процессор 520, который обрабатывает сигнал ГСП и выдает информацию псевдодальности, необходимую для определения положения.
Согласно альтернативному варианту осуществления настоящего изобретения выходные сигналы двух полосовых фильтров 126, 128 поступают на специализированную интегральную схему (СИС) обработки в полосе частот модулирующего сигнала, которая осуществляет цифровое преобразование сигналов промежуточной частоты, выдаваемых фильтрами 126, 128 основной полосы в полосу частот модулирующего сигнала и выдает поток цифровых значений, который представляет квадратурный и синфазный сигналы полосы частот модулирующего сигнала. Эти сигналы затем поступают на блок поиска. Блок поиска по существу идентичен обычным блокам поиска, используемым в демодуляторах МДКР. Однако предпочтительно используемый блок поиска является программируемым, что обеспечивает поиск как ПШ-кода, связанного с сигналами МДКР, передаваемыми с базовой станции, так и ПШ-кода, связанного со спутниками ГСП. Блок поиска селектирует каналы МДКР при приеме сигналов МДКР от базовой станции, а в режиме ГСП определяет спутник ГСП, с которого передаются сигналы ГСП. Кроме того, при обнаружении сигналов ГСП блок поиска указывает сдвиг по времени, связанный с ПШ-кодом, по существу обычным способом, для определения псевдодальности, связанной со спутниками, от которых поступают сигналы, что очевидно для специалистов в данной области техники.
Также ясно, что процесс двойного преобразования, например показанный на фиг. 5, или альтернативно одиночного преобразования и метод дискретизации ПЧ можно использовать для получения необходимых выборок I и Q. Кроме того, структура варианта осуществления, представленная на фиг. 5, допускает разнообразные модификации, не изменяющие сущность настоящего изобретения. Например, вместо ЦСП, который показан на фиг. 5, можно использовать обычный программируемый процессор. Память 510 может не потребоваться, если скорость прохождения данных в системе такова, что буферы не требуются. Полосовой фильтр 406 и схему 408 автоматической регулировки усиления можно исключить или как-либо видоизменить в определенных условиях, реализуемых с использованием цифровых или аналоговых методов. Многие другие подобные вариации, касающиеся структуры, изображенной на фиг. 5, можно осуществить, не затрагивая сущности изобретения. Кроме того, следует заметить, что альтернативный вариант реализации может в большей или меньшей степени предусматривать совместное использование ГСП и беспроводным приемником аппаратных и программных ресурсов.
На фиг. 6 представлена обобщенная блок-схема компонентов системы связи, соответствующая настоящему изобретению.
В ходе работы согласно способу, соответствующему изобретению, КБС 14 запрашивает информацию ГСП у процессора управления 62 (фиг. 3), входящего в состав базовой станции 10. Эта информация включает в себя, без каких-либо ограничений, все спутники, находящиеся в данный момент времени в секторе обзора приемопередатчика 74 ГСП (фиг. 3), их угол места, доплеровский сдвиг и псевдодальности в данный момент времени. Заметим, что приемник ГСП, входящий в состав базовой станции 10, имеет обновляемую информацию местонахождения, частоты и ПШ-сдвига для каждого спутника, находящегося в секторе обзора, поскольку всегда отслеживает все спутники, находящиеся в секторе обзора. Альтернативно базовая станция 10 может передавать данные, соответствующие подмножеству только из тех спутников, которые могут находиться в секторе обзора беспроводного блока 20, с учетом того, что в базовой станции 10 хранится информация, касающаяся ширины улицы и высоты окружающих зданий. Таким образом, если базовая станция 10 имеет возможность определять, что наблюдение одного или нескольких спутников беспроводным блоком будет затруднено, то базовая станция 10 не будет передавать информацию по тем спутникам, наблюдение которых затруднено.
Следует заметить, что обычный приемник ГСП регистрирует время приема спутниковых сигналов по внутренним часам приемника ГСП. Однако внутренние часы приемника ГСП неточно синхронизированы с “истинным” временем системы ГСП. Поэтому приемник не может точно знать “истинное” время системы ГСП для приема спутниковых сигналов. Позже навигационный алгоритм корректирует эту ошибку с использованием четвертого спутника. Таким образом, если бы часы, входящие в состав приемника, были точно синхронизированы с часами на каждом спутнике, то обычному приемнику ГСП потребовалось бы только три спутника для точного определения положения приемника. Однако поскольку часы приемника неточно синхронизированы со спутниковыми часами, необходима дополнительная информация. Эта дополнительная информация предоставляется за счет регистрации времени приема сигнала четвертого спутника в приемнике. Это вытекает из того, что существует четыре уравнения (по одному на каждый из четырех спутников) с четырьмя неизвестными, которые нужно найти (т.е. координаты х, у и z приемника и ошибка часов приемника). Поэтому для трехмерных решений в обычном приемнике ГСП требуется произвести, по меньшей мере, четыре измерения для четырех различных спутников.
Однако настоящее изобретение предусматривает применение наземной станции, которая синхронизирована с истинным временем системы ГСП. Согласно одному из вариантов осуществления эта станция является базовой станцией МДКР. Специалистам должно быть ясно, что базовые станции МДКР синхронизированы с временем системы ГСП. Кроме того, все беспроводные блоки, которые осуществляют связь через такие базовые станции МДКР с использованием протокола МДКР, также синхронизированы с временем системы ГСП со сдвигом, который уникален для каждого беспроводного блока 20. Сдвиг по времени равен односторонней задержке, обусловленной распространением радиосигнала от антенны базовой станции к антенне беспроводного блока. Это обусловлено тем, что беспроводной блок синхронизирует свои часы, принимая от базовой станции указатель времени системы ГСП. Однако за то время, пока этот указатель будет принят беспроводным блоком, он приобретает ошибку, равную задержке распространения сигнала от базовой станции к беспроводному блоку. Эту задержку распространения можно определить путем измерения времени прохождения сигнала в обоих направлениях между базовой станцией и беспроводным блоком. Односторонняя задержка будет равна половине двусторонней задержки. Специалистам в данной области известны различные способы измерения двусторонней задержки.
Кроме того, расстояние между базовой станцией 10 и беспроводным блоком 20 можно использовать для облегчения определения местонахождения беспроводного блока 20. В случае наличия зоны прямой видимости (ЗПВ) между базовой станцией 10 и беспроводным блоком 20 необходимо только два измерения дальности спутника и одно измерение дальности базовой станции. В случае отсутствия ЗПВ между базовой станцией и беспроводным блоком для вычисления трехмерного положения необходимы три спутниковых измерения и одно измерение двусторонней задержки. Для корректировки дополнительного расстояния, внесенного дополнительной задержкой, обусловленной многолучевым распространением, требуется дополнительное спутниковое измерение. Для корректировки ошибки часов в беспроводном блоке используется двусторонняя задержка.
Описанная здесь система позволяет определять положение действительного беспроводного блока МДКР в любое время с применением Функции Позиционирования Беспроводного блока (ФПБ) 18 (фиг.6), пока беспроводный блок 20 находится в зоне обслуживания радиосвязью сети МДКР и пока сеть МДКР обеспечивает достаточное качество обслуживания. Процесс определения положения беспроводного блока может быть инициирован беспроводным блоком 20, сетью или внешним объектом, например внутренним Приложением 17 Определения Местонахождения, внешним Приложением 15 Определения Местонахождения или Приложением 13 экстренной услуги. Каждый из этих компонентов 13, 15 17 может представлять собой либо аппаратное, либо программное обеспечение, которое способно запрашивать и/или получать информацию местонахождения. Согласно одному из вариантов осуществления приложение 17 представляет собой терминал, подключенный к КБС 14, который позволяет оператору непосредственно запрашивать и получать информацию местонахождения беспроводного блока 20. Альтернативно приложение 17 представляет собой прикладную программу, выполняемую процессором, входящим в состав ЦКМ 12.
ФПБ 18 предпочтительно представляет собой обычный программируемый процессор, способный принимать необработанные данные, поступающие от беспроводного блока и от спутников (т.е. псевдодальности двух спутников, расстояние от беспроводного блока до базовой станции и коэффициент поправки по времени) и вычислять положение беспроводного блока. Однако можно использовать любое устройство, способное получать информацию, необходимую для вычисления местонахождения беспроводного блока 20 на основании подобной получаемой информации, и выдавать информацию местонахождения. Например, ФПБ 18 может быть реализована в виде СИС, дискретной логической схемы, автоматом конечных состояний или прикладной программы в другом сетевом устройстве (например, КБС 14). Кроме того, ФПБ 18 может размещаться в базовой станции 10, КБС 14 или где-либо на ЦКМ 12. Предпочтительно, ФПБ 18 представляет собой прикладную программу, которая выполняется предназначенным для этого процессором, связанным с КБС 14. Соответственно для реализации настоящего изобретения посредством обычных компонентов нет необходимости существенно модифицировать базовую станцию 10, КБС 14 и ЦКМ 12. Альтернативно ФПБ 18 может представлять собой прикладную программу, выполняемую процессором, входящим в состав КБС 14. ФПБ 18, предпочтительно, связывается с КБС 14 через коммуникационный порт, аналогичный тому, который используется обычными тарификационными функциями, административными функциями, функциями регистра исходного местоположения регистра местоположения “посетителя” и другими вспомогательными функциями, которые осуществляются процессорами, подключенными к обычным КБС.
Алгоритм, используемый для вычисления положения, представлен в работе: Parkinson B.W. and Spilker J.J., Editors, Global Positioning System: Theory and Applications, Volume. I, American Institute of Aeronautics and Astronautics Inc., Washington DC, 1996), причем в томе II изложено, как осуществлять дифференциальную коррекцию ГСП. Специалистам ясно, что такую коррекцию может понадобиться осуществлять посредством ФПБ 18 для точного вычисления положения беспроводного блока.
В соответствии с одним из вариантов осуществления настоящего изобретения провайдер услуг может ограничивать услуги позиционирования, в зависимости от некоторых условий, например, эффективности, надежности профилей услуг и т.д. Услуги определения местонахождения могут поддерживать каждую или некоторое подмножество из следующих услуг:
(1) Запрос на позиционирование, инициированный беспроводным блоком (ФПБ).
(2) Запрос на позиционирование, инициированный со стороны сети(ЗПС).
(3) Позиционирование, разрешенное в зависимости от услуги (ПРУ): беспроводный блок дает внешнему приложению временное разрешение на позиционирование блока в целях оказания определенной услуги.
(4) Позиционирование с идентификацией /без идентификации беспроводного блока (ПСИ/ПБИ): будет позиционировать все беспроводные блоки в заданной географической области. ПСИ будет выдавать идентификатор и местонахождение этих блоков, тогда как ПБИ будет выдавать только их местонахождение.
(5) Позиционирование в замкнутой группе (ПЗГ): позволяет создавать группы, в которых могут быть определены особые права на позиционирование (групповое управление) (таблица).

Согласно одному из вариантов осуществления настоящего изобретения, в котором беспроводный блок 20 посылает запрос на определение положения этого беспроводного блока 20, он направляет запрос позиционирования в ЦКМ 12. ЦКМ 12 проверяет достоверность запроса, чтобы убедиться, что беспроводный блок 20 является абонентом запрашиваемого типа обслуживания. Затем ЦКМ 12 направляет запрос на обслуживание на обслуживающий КБС 14 для позиционирования беспроводного блока 20. КБС 14 запрашивает обслуживающую базовую станцию 10 на предмет получения информации обеспечения позиционирования. Обслуживающая базовая станция 10 отвечает на запрос путем передачи списка спутников, находящихся в секторе обзора, их доплеровского сдвига, скорости изменения их доплеровской частоты, псевдодальности, углов места, отношения сигнал - шум (ОСШ) и двусторонней задержки (ДСЗ) между беспроводным блоком и обслуживающей базовой станцией. Заметим, что приемник ГСП 74 в составе базовой станции 10 непрерывно отслеживает спутники, находящиеся в секторе обзора, и потому может иметь обновляемую информацию по этим параметрам. КБС 14 использует ДСЗ, псевдодальность, угол места спутника, доплеровский сдвиг и скорость изменения доплеровской частоты для каждого спутника для вычисления центра окна поиска и размера окна поиска как по времени, так и по частоте, следующим образом (см. также фиг. 7).
Во временной области центр окна поиска для i-го космического аппарата (KAi) равен псевдодальности между обслуживающей базовой станцией 10 и KAi, b на фиг 7. Размер окна поиска для KAi равен двусторонней задержке, умноженной на cos(_i), где cos(_i) это косинус угла места спутника по отношению к радиусу Земли, который начинается в центре Земли и проходит через приемник.
В частотной области центр окна поиска для Kai равен fo+fdi, где fo - несущая частота сигнала ГСП, a fdi- доплеровский сдвиг сигнала, передаваемого Kai. Размер окна поиска для Kai равен неопределенности по частоте, обусловленной частотной ошибкой приемника и скоростью изменения доплеровской частоты. КБС 14 передает информацию, включающую в себя спутники, находящиеся в секторе обзора, центры и размеры окна поиска по времени и по частоте и минимальное количество спутников, необходимое для определения положения беспроводного блока 20.
Согласно одному из вариантов осуществления сообщение, поступающее на беспроводный блок 20, будет запускать сигнал повторной настройки в беспроводном блоке 20. Сообщение также может обеспечивать “момент срабатывания” (тот или иной момент в будущем, когда приемник будет настраиваться на частоту приемника ГСП). В ответ беспроводный блок 20 будет активировать первый и второй переключатели 106 и 402 в момент срабатывания (фиг. 5) и, таким образом, настраиваться на частоту ГСП. СИС 400 цифровой обработки на ПЧ переключает свой генератор ПШ (не показан) в режим ГСП и начинает поиск всех заданных спутников.
Обнаружив минимальное количество необходимых спутников, беспроводный блок 20 вычисляет псевдодальности на основе часов системы ГСП, входящих в состав беспроводного блока 20, настраивается на частоту системы связи и передает полученные псевдодальности совместно с измеренным отношением сигнал - шум первых трех спутников и последним результатом поиска пилот-сигнала МДКР в КБС 14. Результаты поиска пилот-сигналов необходимы, если блок не может обнаружить три спутника и отсутствует прямой сигнал в зоне прямой видимости между обслуживающей базовой станцией и беспроводным блоком 20. Тем не менее можно использовать менее трех спутников, если с использованием имеющейся информации, например информации по поиску пилот-сигналов, можно вычислять двустороннюю задержку для другого устройства, например другой базовой станции. Методы определения двусторонней задержки на основании информации по поиску пилот-сигнала широко известны в технике.
КБС 14 передает результаты измерений псевдодальности, осуществленных беспроводным блоком 20, а также положение обслуживающей базовой станции 10, соответствующие результаты измерений двусторонней задержки, положение (в пространстве) соответствующих спутников (относительно заданной неподвижной системы координат) и дифференциальную коррекцию ГСП на ФПБ 18, где производится вычисление положения беспроводного блока 20. Псевдодальности, полученные КБС 14 от беспроводного блока 20 и переданные на ФПБ 18, измерены относительно часов, входящих в состав беспроводного блока 20. Поэтому они содержат ошибку (т.е. смещены на величину двусторонней задержки между обслуживающей ППБ 10 и беспроводным блоком 20). На фиг. 8 представлена диаграмма, иллюстрирующая, как ФПБ 18 корректирует ошибку локальных часов. На фиг. 8_1 представляет псевдодальность (половину двусторонней задержки) при приеме сигналов, передаваемых с базовой станции 10 на беспроводный блок 20 и обратно; rm1, rm2 и rm3 - псевдодальности от беспроводного блока до первого, второго и третьего выбранных спутников ГСП, 60, 70 и 80 соответственно. Эти измерения производятся относительно локальных часов, входящих в состав беспроводного блока 20. Но поскольку локальные часы имеют сдвиг относительно истинного времени системы ГСП на 1, скорректированные псевдодальности выражаются следующим образом:
_1=_m1+_1
_2=_m2+_1
_3=_m3+_1
Для вычисления положения беспроводного блока 20 ФПБ 18 использует три вышеприведенные уравнения, положение (в пространстве) трех спутников, положение обслуживающей базовой станции и соответствующие результаты измерения ДСЗ. Заметим, что информация по ДСЗ в точности эквивалентна информации по ошибке локальных часов беспроводного блока относительно истинного времени системы ГСП. Таким образом, достаточно решить три уравнения дальности для трех спутников.
Заметим также, что при наличии соединения между беспроводным блоком 20 и базовой станцией 10 в зоне прямой видимости, в результате чего расстояние между беспроводным блоком 20 и базовой станцией 10 можно определить непосредственно из ДСЗ между беспроводным блоком 20 и базовой станцией 10, минимальное необходимое количество спутников можно сократить до двух. Это количество также можно сократить, если имеется информация о других пилот-сигналах (узлах связи). Например, если беспроводный блок установил связь с двумя или более базовыми станциями (например, в режиме “гибкого” переключения каналов связи), ни одна из которых не находится в зоне прямой видимости беспроводного блока 20, то можно вычислить более одной двусторонней задержки и, следовательно, для определения положения беспроводного блока 20 нужно только два спутника. Таким образом, вычисления можно производить на основании пяти уравнений (двух уравнений относительно двух результатов измерения псевдодальности, связанных с двумя спутниками, двух уравнений относительно двух результатов измерения ДСЗ базовых станций и одного уравнения относительно ДСЗ до обслуживающей базовой станции, которая позволяет синхронизировать локальные часы беспроводного блока 20 с истинным временем системы ГСП). Это полезно в случае, когда наблюдения спутников ГСП затруднено ввиду затенения зданиями, деревьями и т.п. Кроме того, это сокращает время поиска спутников ГСП. ФПБ 18 посылает вычисленное положение в КБС 14, который передает его в ЦКМ 12 или непосредственно в беспроводный блок 20.
Настоящее изобретение описано со ссылками на конкретные варианты осуществления для конкретных применений. Специалистам в данной области техники должно быть понятно, что возможны различные модификации и варианты осуществления изобретения. Поэтому прилагаемая формула изобретения включает в свой объем все возможные приложения модификации и варианты осуществления изобретения.


Изобретение относится к системам связи. Достигаемым техническим результатом является быстрое, точное и экономичное определение местоположения сотового телефона. Изобретение объединяет технологии определения положения с помощью ГСП (Глобальной Системы Позиционирования) и беспроводной связи для обеспечения точного определения положения в условиях города и иных средах, где зона прямой видимости спутников в некоторой степени затенена. Устройство и способ, соответствующие изобретению, предусматривают использование сигналов только двух спутников ГСП и обслуживающей базовой станции. В наиболее широком аспекте способ, соответствующий изобретению, включает этапы приема на базовой станции первого сигнала, передаваемого с первого спутника ГСП, и второго сигнала, передаваемого со второго спутника ГСП. Передатчик и приемник мобильной станции обеспечивают прием этих сигналов ГСП и передачу в ответ на них третьего сигнала на базовую станцию. Базовая станция принимает третий сигнал и использует его для вычисления положения беспроводного блока. 3 с. и 18 з.п. ф-лы, 8 ил., 1 табл.
| US 5726893 А, 10.03.1998 | |||
| RU 94037589 А, 10.09.1996 | |||
| Камера волокноосаждения | 1971 |
|
SU444738A1 |
| WO 9428434 А, 08.12.1994 | |||
| WO 9733382 А, 12.09.1997 | |||
| WO 9615636 А, 23.05.1996 | |||
| US 5680140 A, 21.10.1997. | |||

