По этой заявке испрашивается приоритет по дате подачи заявки №60/857972 на патент США, поданной 10 ноября 2006 г., под названием “Bit efficient support of extended orbit for GNSS”, заявки №60/886230 на патент США, поданной 23 января 2007 г., под названием “Efficient range correction messages for accurate position determination with assisted GPS”, заявки №60/888738 на патент США, поданной 7 февраля 2007 г., под названием “Bit efficient support of extended orbit for GNSS”, заявки №60/896493 на патент США, поданной 22 марта 2007 г., под названием “Method and apparatus for position determination with extended SPS orbit information”, заявки №60/917622 на патент США, поданной 11 мая 2007 г., под названием “Method and apparatus for position determination with extended SPS orbit information” и заявки №60/939964 на патент США, поданной 24 мая 2007 г., под названием “Method and apparatus for position determination with extended SPS orbit information”, все они полностью включены в настоящую заявку путем ссылки и переуступлены ее правопреемнику.
Область техники, к которой относится изобретение
В общем настоящее изобретение относится к спутниковой системе позиционирования (SPS), а более конкретно к содействию мобильной станции в определении местоположения спутника с использованием эффективного формата передачи сообщения, содержащего расширенную информацию о коррекции орбиты спутника в спутниковой системе позиционирования.
Уровень техники
Приемник спутниковой системы позиционирования обычно определяет свое положение путем вычисления времен прихода сигналов, одновременно передаваемых с нескольких спутников. Как часть сообщений эти спутники передают данные о местоположениях спутников и данные о метках времени часов. Положения спутников и метки времени часов обычно представлены альманахом или эфемеридными данными. Эфемеридные данные обеспечивают очень точную оценку (с ошибкой ~1 м) положений спутников и ошибки часов. Однако процесс поиска и регистрации сигналов спутников, чтения эфемеридных данных, передаваемых спутниками, и вычисления местоположения приемника на основании этих данных является длительным, часто требующим несколько минут. Во многих случаях это длительное время обработки не является приемлемым, и кроме того, сильно ограничивает срок службы батареи в миниатюрных портативных устройствах.
Например, в глобальной системе позиционирования (GPS) положение определяется на основании измерения времен прихода на антенну приемника глобальной системы позиционирования сигналов глобальной системы позиционирования, передаваемых в широковещательном режиме с движущихся по орбитам спутников. Установлено, что один недостаток такой системы заключается в относительно продолжительном времени, необходимом для осуществления регистрации сигналов в определенных условиях. Сигналы спутников не могут отслеживаться до тех пор, пока они сначала не будут обнаружены путем поиска в двумерном пространстве поиска, измерениями которого являются кодовая задержка по фазе и наблюдаемый доплеровский сдвиг частоты. Процесс поиска приемником спутниковой системы позиционирования для регистрации и демодуляции сигналов спутников иногда называют автономным режимом работы, который можно противопоставить вспомогательному режиму работы.
Чтобы уменьшить задержку, связанную с автономным режимом работы, при регистрации конкретного сигнала в помощь приемнику спутниковой системы позиционирования или глобальной системы позиционирования может быть предоставлена информация. Такая вспомогательная информация позволяет приемнику сузить пространство поиска, которое должно быть исследовано для обнаружения сигнала, путем наложения ограничений на характеристики кода и частоты. Система, в которой используется приемник глобальной системы позиционирования, пополняемый вспомогательными данными от внешнего источника глобальной системы позиционирования, обычно называют глобальной системой позиционирования с поддержкой (AGPS).
Один пример глобальной системы позиционирования с поддержкой включает в себя беспроводную мобильную станцию (например, сотовый телефон), имеющую связь или находящуюся на связи с приемником глобальной системы позиционирования, при этом мобильная станция находится на связи с одной или несколькими базовыми станциями, также называемыми базовыми передающими станциями или узлами B беспроводной сети связи, которые в свою очередь в зависимости от интерфейсного протокола воздушной линии связи находятся на связи с одним или несколькими серверами содействия определению местоположения, иногда называемыми системами определения положения (PDE), обслуживающими центрами определения местоположения подвижного объекта (SMLC) или аналогичными. Другой пример глобальной системы позиционирования с поддержкой включает в себя мобильную станцию или лэптоп, имеющий связь или находящийся на связи с приемником глобальной системы позиционирования, мобильную станцию или лэптоп, способные связываться с сетью передачи данных, такой как, но без ограничения ею, Интернет, через который устройство в конечном счете связывается с сервером содействия определению местоположения.
Сервер содействия определению местоположения получает вспомогательную информацию глобальной системы позиционирования от одного или нескольких опорных приемников глобальной системы позиционирования. Сервер содействия определению местоположения также имеет доступ к средству для определения примерного положения мобильной станции. Сервер содействия определению местоположения сохраняет базу данных глобальной системы позиционирования, которая содержит опорное время, информацию об альманахе и эфемеридах орбиты спутника, информацию об ионосфере и информацию о рабочем состоянии («здоровье») спутника. Сервер содействия определению местоположения также вычисляет вспомогательную информацию, специально предназначенную для определения примерного положения мобильной станции.
Местоположение мобильной станции в глобальной системе позиционирования с поддержкой может быть определено на мобильной станции (иногда это называют режимом позиционирования на основе мобильной станции) при помощи сервера содействию определения местоположения. В продолжение режима позиционирования на основе мобильной станции, когда для сервера глобальной системы позиционирования требуются обновленные, способствующие процессу данные, такие как эфемеридные данные, данные альманаха, относящиеся к местоположениям спутников или базовых станций, временная информация для базовых станций и/или спутников или положение источника (например, но без ограничения им, определенное с помощью усовершенствованной трилатерации на основе линии связи с сотовыми ретрансляторами (AFLT)) и т.д., последующее определение местоположения будет результатом контакта мобильной станции с сетью передачи данных, при этом сеть чрезмерно нагружается и используются энергетические ресурсы мобильной станции. В качестве варианта местоположение мобильной станции в глобальной системе позиционирования с поддержкой может быть определено на сервере содействия определению местоположения с использованием информации, зарегистрированной мобильной станцией, и передано обратно на мобильную станцию (иногда это называют режимом позиционирования с поддержкой мобильной станцией). Орбиты спутников в глобальной системе позиционирования можно моделировать как видоизмененные эллиптические орбиты с поправочными членами для учета различных возмущений. Относительно краткосрочные эфемеридные данные обеспечивают очень точное представление орбиты спутника. Например, бит 17 в слове 10 подкадра 2 глобальной системы позиционирования представляет собой признак «временного интервала годности», который обозначает временной интервал годности кривой, используемой сегментом управления и контроля глобальной системы позиционирования при определении параметров эфемерид, при этом «0» обозначает 4-часовую годность и «1» обозначает годность «больше 4 часов». Кроме того, расширенным навигационным режимом блока II/IIA спутников глобальной системы позиционирования гарантируется передача точных параметров эфемерид в течение 14 дней для поддержания краткосрочной расширенной работы. Во время нормальной работы сегмент управления и контроля обеспечивает ежедневные загрузки навигационных (орбитальных) данных для каждого спутника, чтобы поддерживать точность позиционирования со статистической сферической ошибкой 16 м.
Как описывалось, сервер содействия определению местоположения имеет доступную точную орбитальную информацию. Действие модели эфемерид и поправки часов, загружаемой сервером содействия определению местоположения, обычно распространяется с большой точностью на 4-часовой временной интервал. Для охвата более длительного периода времени, такого как 24-часовой период времени, сервер содействия определению местоположения может посылать на устройство несколько моделей 4-часовых эфемерид и поправки часов для каждого из N спутников в созвездии. Однако для полного созвездия спутников (например, 27 спутников) потребуется большое количество восьмибитовых байтов для описания положений спутников и погрешностей часов. Эти длинные сообщения будут способствовать увеличению продолжительности времени обработки, и следовательно, неприемлемы для большей части применений мобильных устройств. Они также будут чрезмерно нагружать сеть связи.
В дополнение к эфемеридным данным спутники в глобальной системе позиционирования также передают данные альманаха, которые могут использоваться для определения положений спутников и ошибки часов. Данные альманаха обеспечивают усеченный с уменьшенной (грубой) точностью набор параметров эфемерид, а также неточные параметры поправок часов. Вследствие этого существует тенденция намного меньшей точности (~1 км) исходных положений спутников, получаемых на основании данных альманаха, чем положений спутников, получаемых на основании детализированных эфемеридных данных (~1 м). Следует отметить, что обычно орбиты спутников можно представлять неточным набором (например, альманахом) или точным набором (например, эфемеридами) параметров орбит и часов спутников.
Существует необходимость в системе и способе для получения расширенных орбитальных данных для приемника глобальной системы позиционирования, чтобы снизить требуемую частоту загрузки альманаха и/или эфемерид непосредственно со спутников или с сервера содействия определению местоположения.
Сущность изобретения
Описываются способ и система для содействия мобильным станциям в определении местоположений спутников с использованием эффективного формата передачи сообщений. Сервер вычисляет поправку между грубыми орбитальными данными спутника и точными орбитальными данными спутника. Систему координат выбирают так, что изменение поправки является по существу плавным с течением времени. Сервер также аппроксимирует поправку математическими функциями, чтобы уменьшить число битов, необходимых для передачи на мобильную станцию. Мобильная станция после приема коэффициентов оценивает математические функции, используя коэффициенты и время применимости (например, текущее время), преобразует оцененный результат в стандартную систему координат и применяет результат преобразования к грубым орбитальным данным для получения точных орбитальных данных.
Способом и системой, описываемыми в настоящей заявке, предоставляется уникальный путь решения проблем, связанных с долгосрочными орбитальными данными спутников. Преимущества способа и системы включают в себя меньший размер файлов и небольшие сообщения, посылаемые на мобильную станцию, а также более высокую точность определения положений и времени спутников. Кроме того, представлен гибридный режим работы для улучшения прогнозов положений и времени спутников.
Другие признаки настоящего изобретения будут очевидными из сопровождающих чертежей и из подробного описания, которые следуют ниже.
Краткое описание чертежей
Настоящее изобретение показано для примера, а не для ограничения, на фигурах сопровождающих чертежей, на которых одинаковыми позициями обозначены аналогичные элементы. Следует отметить, что в этом раскрытии ссылки на «одно» осуществление необязательно относятся к одному и тому же осуществлению, и такие ссылки означают «по меньшей мере одно».
На чертежах:
фигура 1 - схема, показывающая пример системы связи, включающей в себя сервер для содействия мобильной станции в определении местоположения спутника;
фигура 2 - схема, показывающая систему координат согласно аспекту изобретения;
фигура 3 - схема последовательных операций, показывающая пример способа, выполняемого мобильной станцией;
фигура 4 - схема последовательных операций, показывающая пример способа, выполняемого сервером;
фигура 5 - схема последовательных операций, показывающая дополнительные подробности способа из фигуры 4;
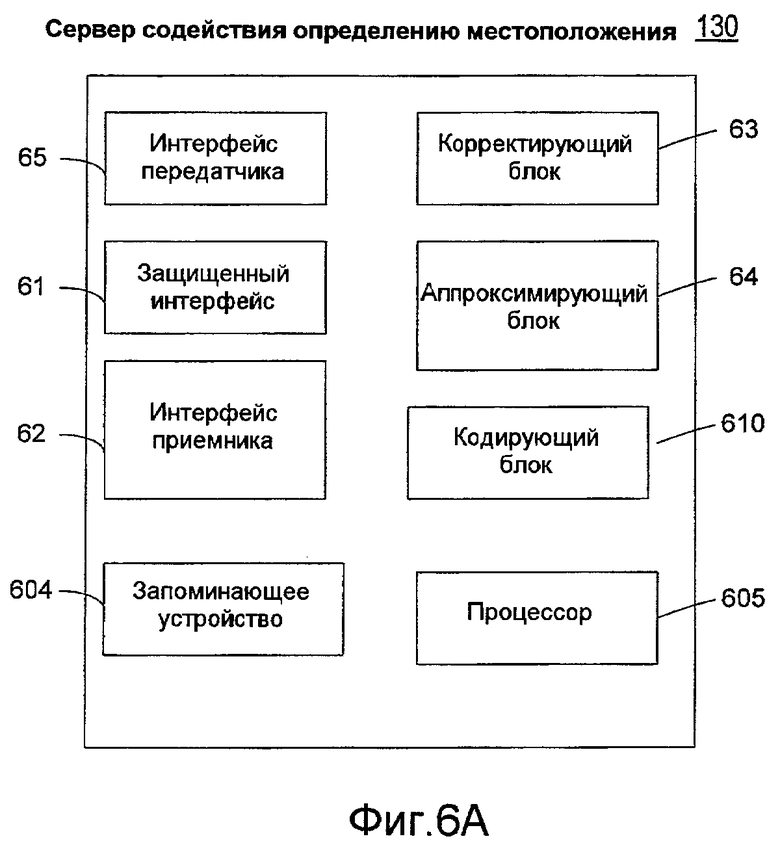
фигура 6А - структурная схема, показывающая пример компонентов в сервере содействия определению местоположения;
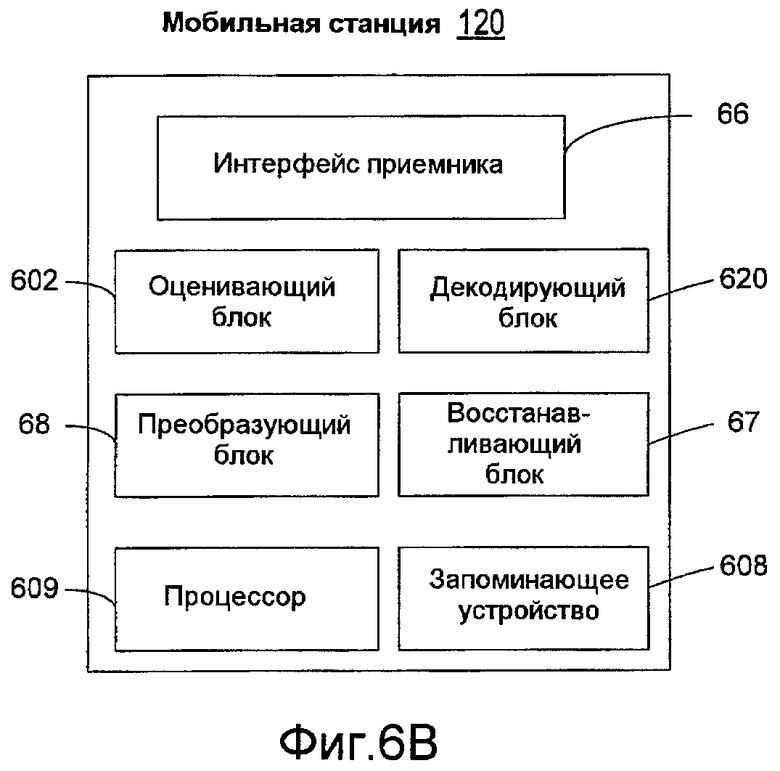
фигура 6В - структурная схема, показывающая пример компонентов в мобильной станции.
Подробное описание
Описываются способ и система для содействия мобильным станциям в определении положений спутников и погрешностей часов спутников. Положения спутников и погрешности часов спутников определяют, используя эффективный формат передачи сообщений, содержащих расширенную информацию о коррекции орбит спутников спутниковой системы позиционирования. Способом и системой, описанными в настоящей заявке, предоставляется уникальный путь решения проблем, связанных с долгосрочными орбитальными данными спутников. Согласно одному аспекту изобретения способ позволяет уменьшать размер файла и сокращать сообщения, посылаемые на мобильную станцию. Способ также повышает точность определения положений и времени спутников на мобильной станции. Согласно другому аспекту изобретения вводится гибридный режим работы для улучшения прогнозов положений и времени спутников.
Число битов, необходимых для поддержания поправок для протяженных орбит и часов, значительно уменьшается при использовании поправочных данных, вычисляемых на сервере содействия определению местоположения, и грубых орбитальных данных, принимаемых на мобильной станции. Поправочные данные представляют собой разности между положениями спутника, вычисленными на основании грубого представления орбиты спутника (например, но без ограничения им, альманаха), и положениями спутника, вычисленными на основании спрогнозированных точных орбитальных данных (например, орбитальных данных из продолжительного отрезка времени, большего, чем тот, который может быть получен от искусственного спутника (например, 6 ч или больше). Поправочные данные также включают в себя разности между поправками часов, вычисленными на основании грубых орбитальных данных, и поправками часов, вычисленными на основании спрогнозированных данных часов спутника. Обычно эти поправки изменяются с течением времени и являются уникальными для каждого спутника. Однако при соответствующем выборе системы координат изменение может быть относительно плавным. В таком случае поправки описываются во времени математической функцией (например, но без ограничения им, полиномом), при этом на мобильную станцию сервером содействия определению местоположения передаются только коэффициенты.
Используемый в настоящей заявке термин «мобильная станция» (МС) относится к устройству, такому как устройство сотовой или другой беспроводной связи, устройство системы персональной связи, лэптоп или другое подходящее мобильное устройство, способное принимать и обрабатывать сигналы спутниковой системы позиционирования. Термин «мобильная станция» также предполагается охватывающим устройства, которые связаны с персональным навигационным устройством, например беспроводным, инфракрасным, кабельным соединением с малым радиусом действия или другим соединением, независимо от того, на устройстве или на персональном навигационном устройстве происходит прием сигналов спутников, прием вспомогательных данных и/или связанная с положением обработка. Кроме того, «мобильная станция» предполагается включающей в себя все устройства, включая устройства беспроводной связи, компьютеры, лэптопы и т.д., которые способны осуществлять связь с сервером, например по сети Интернет, беспроводного доступа (WiFi) или другой сети и независимо от того, в устройстве, сервере или в другом устройстве, связанном с сетью, происходит прием сигналов спутников, прием вспомогательных данных и/или связанная с положением обработка. Любое работоспособное сочетание указанного выше также считается «мобильной станцией».
Термин «грубые орбитальные данные» в настоящей заявке относятся к грубой оценке положения спутника и данным часов, передаваемым со спутника, например к альманаху. Термин «орбитальные данные в реальном времени» относятся к точному представлению положений и времени спутника, передаваемых со спутника, например к эфемеридам. Термин «спрогнозированные орбитальные данные» или «точные орбитальные данные» относятся к точной оценке положения и времени спутника, которые имеют относительно продолжительный период достоверности по сравнению с точными орбитальными данными в реальном времени. Спрогнозированные орбитальные данные имеются на сервере содействия определению местоположения. Однако для передачи спрогнозированных орбитальных данных на мобильную станцию обычно используют значительную ширину полосы частот. Поэтому при передаче поправочных данных или их приближения часто существенно повышается эффективность передачи.
На фигуре 1 представлена структурная схема системы 100 связи согласно аспекту настоящего изобретения. Система 100 включает в себя сервер 130 содействия определению местоположения, связанный по линии связи с одной или несколькими мобильными станциями 120. Сервер 130 содействия определению местоположения принимает грубые орбитальные данные, а также точные орбитальные данные и/или файлы спрогнозированных орбитальных параметров, содержащие спрогнозированные орбитальные данные. В одном варианте сервер 130 содействия определению местоположения принимает спрогнозированные орбитальные данные по сети 162 от провайдера 110 спрогнозированных орбитальных данных. Сеть 162 может быть сетью, которая поддерживает соединения по интернетовскому протоколу (IP), например Интернетом. Сервер 130 содействия определению местоположения может включать в себя интерфейс, например программу защищенной передачи файлов (SFTP), для защищенной передачи спрогнозированных орбитальных данных от провайдера 110 спрогнозированных орбитальных данных.
Согласно одному аспекту провайдер 110 спрогнозированных орбитальных данных формирует спрогнозированные орбитальные данные через каждые несколько часов (например, 4 ч), чтобы представлять орбитальные данные, которые являются достоверными в течение продолжительного отрезка времени (например, 6 ч или дольше). Сервер 130 содействия определению местоположения через короткие промежутки времени проверяет новые данные (например, каждый час). Спрогнозированные орбитальные данные могут также включать в себя трехмерные значения неопределенности для спрогнозированных координат спутника, неопределенности спрогнозированных поправок часов спутника, а также указание относительно прогнозируемых отключений. На основании информации о неопределенности и отключениях пользовательская ошибка дальности (URE) может быть вычислена сервером 130 содействию определению местоположения и передана на мобильную станцию 120.
Сервер 130 содействия определению местоположения принимает грубые орбитальные данные от провайдера 150 орбитальных данных в реальном времени по сети 164. Провайдер 150 орбитальных данных в реальном времени может быть шлюзом глобальной справочной сети (GRN) или шлюзом территориально распределенной справочной сети (WARN), который принимает спутниковую информацию в реальном времени, включая, но без ограничения ими, объединенные в пакет справочные данные спутниковой системы позиционирования, навигационные сообщения, страничную информацию о «здоровье», альманах и эфемериды. В одном варианте сеть 164 представляет собой сеть, которая поддерживает соединения по интернетовскому протоколу (IP), а сервер 130 содействия определению местоположения может принимать спутниковую информацию в реальном времени от провайдера 150 орбитальных данных в реальном времени в виде многоадресных сообщений по интернетовскому протоколу (IP).
Сервер 130 содействия определению местоположения формирует поправочные данные 140 на основании спрогнозированных орбитальных данных и грубых орбитальных данных. Поправочные данные 140 могут быть переданы непосредственно на мобильную станцию 120 или к месту нахождения запоминающего устройства, доступного для мобильной станции. Например, поправочные данные 140 могут сохраняться в запоминающем устройстве, локально или дистанционно связанном с сервером 130 содействия определению местоположения. Мобильная станция 120 может принимать поправочные данные 140 от хоста 160 данных по сети 166 с использованием протокола передачи файлов, например FTP (протокола передачи файлов), HTTP (протокола передачи гипертекстовых сообщений) или других подходящих сетевых протоколов.
В настоящей заявке для упрощения рассмотрения термин «поправочные данные» 140 относится к орбитальным поправкам спутника, которые могут быть переданы от одной точки к другой, переданы в файлах, переданы по широковещательной сети или переданы из одного места в другое с помощью любого средства передачи данных. Сообщения, формируемые сервером 130 содействия определению местоположения, имеют эффективный формат передачи сообщений, который позволяет мобильной станции 120 определять положения и показания часов спутника при небольшом числе битов на протяжении продолжительного периода времени. Сообщениями мобильной станции 120 предоставляется информация для коррекции грубых орбитальных данных, так что скорректированное положение спутника является точным в пределах нескольких метров.
Согласно другому аспекту сервер 130 содействия определению местоположения может также передавать на мобильную станцию 120 оценку точности (пользовательскую ошибку дальности), корректирующую модель ионосферы, модель всемирного скоординированного времени (UTC), и информацию о «здоровье»/эксплуатационной готовности спутника. Это гарантирует целостность спутниковых данных и позволяет осуществлять мобильную работу без необходимости приема и декодирования данных, передаваемых спутниками по воздуху. Это также гарантирует, что в мобильной станции 120 используются грубые орбитальные данные, которые идентичны грубым орбитальным данным, используемым в сервере 130 содействия определению местоположения.
Следует отметить, что описанная выше система показана только для иллюстрации и могут существовать другие конфигурации. Например, в качестве варианта сети 162, 164 и 166 могут быть прямыми соединениями, локальными сетями, территориально распределенными сетями, широковещательными сетями, любыми подходящими проводными или беспроводными сетями, компьютерами или компьютерными сетями или сочетаниями из них, которые поддерживают передачу данных или передачу файлов.
Специалисту в данной области техники должно быть понятно, что грубые орбитальные данные, которые обеспечивают грубую оценку положений спутника, охватывают широкий диапазон форм. В нижеследующем описании последняя копия широковещательного альманаха глобальной системы позиционирования предлагается для использования в качестве грубой оценки положений и показаний часов спутника для облегчения понимания концепции изобретения. Однако все нижеследующее представляет собой иллюстрацию альтернативных грубых орбитальных данных: прежней копии широковещательных эфемерид глобальной системы позиционирования; последних копий широковещательного альманаха или эфемерид «Галилео» или «ГЛОНАСС»; нешироковещательной грубой модели положений спутника, которая следует той же самой форме, что и альманах или эфемериды глобальной системы позиционирования, «Галилео» или «ГЛОНАСС»; любого подмножества или расширения параметров Кеплера, используемых в форматах альманаха и эфемерид глобальной системы позиционирования, «Галилео» и «ГЛОНАСС»; любых не кеплеровских представлений орбит спутников; и других спрогнозированных орбитальных данных, которые ухудшаются с течением времени. Кроме того, должно быть понятно, что соответствующую информацию, относящуюся к другим спутниковым навигационным системам, также можно применять в рамках раскрытой методики. Настоящее изобретение включает в себя любые и все способы описания неточной орбиты. Специалист в данной области техники должен понимать, что методика применима независимо от формы, которую принимает грубая оценка.
В некоторых вариантах грубые орбитальные данные могут поставляться сервером 130 содействия определению местоположения на мобильную станцию 120. В дополнение к передаче грубой оценки положений спутника на мобильную станцию 120 сервер 130 содействия определению местоположения обладает возможностью включать опорное время во вспомогательное сообщение на мобильную станцию. Согласно этому аспекту изобретения сервер 130 содействия определению местоположения получает опорное время от сетевого сервера времени или из данных глобальной системы позиционирования, принимаемых от отдельных опорных приемников (например, территориально распределенной справочной сети или глобальной справочной сети). Эта информация об опорном времени может быть приложена к сообщению, передаваемому на мобильную станцию 120, которое содержит грубую оценку положений спутника. Сервер 130 содействия определению местоположения также может обеспечивать выполнение алгоритмов, что может повышать точность опорного времени, предоставляемого сетевым сервером времени, и передавать это более точное время на мобильную станцию 120.
Следует отметить, что мобильная станция 120 может непосредственно получать опорное время, независимо от сервера 130 содействия определению местоположения, из сети с коммутацией пакетов данных, которая может быть или может не быть синхронизирована со временем глобальной системы позиционирования (например, от сетевого сервера времени или из сети связи на основе многостанционного доступа с кодовым разделением (CDMA)). Таким путем мобильная станция 120 получает оценку глобального опорного времени, например времени глобальной системы позиционирования, всемирного координатного времени (UTC), времени WWO и т.д.
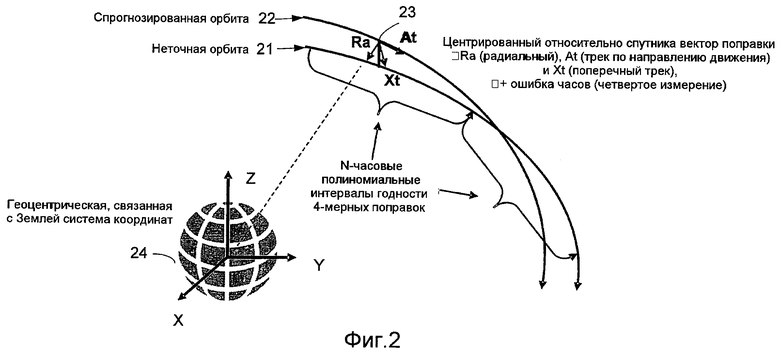
На фигуре 2 показан пример системы координат, на основании которой вычисляются поправочные данные 140. Трек 21 представляет собой фактический трек орбиты спутника, который можно по существу оценивать с помощью точных прогнозов орбиты. Трек 22 представляет собой трек орбиты, оцениваемый с помощью грубых орбитальных данных, таких как, но без ограничения ими, широковещательный альманах. В любой момент времени существует пространственная разность между местом нахождения спутника, на которое указывает широковещательный альманах, и местом нахождения, на которое указывают точные прогнозы орбиты. Эту разность можно закодировать в системе 23 координат, которая представляет собой систему координат, имеющую начало и оси, которые движутся вместе с корпусом спутника. Выраженный в ортогональной системе 23 координат «сигнал ошибки», который является разностью между точно спрогнозированным положением спутника и основанным на альманахе положением спутника, становится по существу гладкой кривой. Изменение сигнала ошибки является по существу плавным во времени, так что в сигнале ошибки нет перегибов или резких поворотов, когда он представлен как функция времени. В осуществлении из фигуры 1 сигнал ошибки образует поправочные данные 140. Основополагающий способ выражения сигнала ошибки в выбранной системе координат эффективно минимизирует степень полиномов, необходимых для выражения этих «сигналов ошибок» с любой заданной точностью.
Согласно одному аспекту поправочные данные 140 состоят из четырех измерений информации: трех пространственных измерений (представленных тремя осями системы координат) для описания ошибки положения спутника и временного измерения (четвертого измерения), которое описывает поправку показаний часов спутника.
Тремя осями системы 23 координат являются: Ra, которая является единичным вектором, направленным от неточного положения спутника (например, положения спутника, определенного на основании широковещательного альманаха) к начальной точке. Поскольку в типичных ситуациях начальной точкой является центр Земли, эта ось интерпретируется как «радиальная». Специалист в данной области техники должен понимать, что начальная точка может быть любой точкой (например, внутри, выше, на или вблизи поверхности Земли), которую можно определить с приемлемой точностью.
Другой осью является Xt: «поперечный трек», который определяется как Xt=Ra×Vel/|Ra×Vel|. Vel представляет собой основанный на альманахе вектор скорости спутника и «×» обозначает векторное произведение. Следовательно, вектор Xt является перпендикулярным к радиальному вектору Ra и к направлению движения спутника.
Третью осью является At: «трек по направлению движения», который определяется как At=Xt×Ra. Вектор At является почти параллельным вектору (Vel) скорости спутника, но не совсем. Это потому, что вектор скорости спутника не является точно ортогональным к Ra вследствие эксцентричности орбиты (например, орбита спутника по природе является эллиптической, а не круговой). Поскольку с течением времени радиус орбиты спутника увеличивается и уменьшается, вектор Vel скорости спутника обычно имеет составляющую по радиальному направлению Ra.
Три оси системы 23 координат, определенные выше, являются функцией времени, поскольку они зависят от мгновенного положения спутника по направлению его орбиты. Среди прочих движений, как например орбит спутников Земли, радиальный вектор Ra и вектор At трека по направлению движения поворачиваются на все 360° при выражении в геоцентрической, связанной с Землей системой 24 координат XYZ. Отметим, что эти оси вычисляются с использованием основанной на альманахе оценке положения спутника. Это позволяет вычислять оси системы 23 координат с помощью сервера 130 содействия определению местоположения до вычисления поправок альманаха. В примере системы 23 координат порядок, в котором оси вычисляются, является существенным для надлежащей ориентации системы координат. Поэтому радиальный вектор Ra вычисляют первым, вектор Xt поперечного трека вычисляют вторым и вектор At трека по направлению движения вычисляют последним.
Ориентация осей, определенных выше, является другой для каждого спутника. Можно записать единичные векторы в виде Ra(PRN,t), At(PRN,t), Xt(PRN,t) и сделать их зависимыми от псевдослучайного номера (PRN) спутника и t, которые являются соответственно номером спутника и текущим временем в явной форме. Однако ради простоты обозначений при нижеследующих рассмотрениях эти зависимости остаются подразумеваемыми.
Другие системы координат также можно использовать для коррекций грубых орбитальных данных, такие как, но без ограничения ими, система координат радиус/поперечный трек/скорость (отличная от (Ra, At, Xt), описанной выше); трехмерная геоцентрическая, связанная с Землей система координат XYZ для вычисления разностей или (полярная) система координат угол возвышения/азимут.
Специалисту в данной области техники должно быть понятно, что система координат (Ra, At, Xt) (подчиняющаяся известному правилу левой руки) является иллюстративным и одним предпочтительным приближением, но что широкий диапазон других систем осей охватывается настоящим изобретением. Характерный признак этих систем осей заключается в том, что для них существует тенденция иметь две пространственные размерности со значительно менее строгими требованиями к точности по сравнению с третьей. В примере системы 23 координат (Ra, At, Xt) обычно для At и Xt имеются более слабые требования к точности (например, 1/7) по сравнению с Ra. Система координат может быть ортогональной или неортогональной. Для коррекции грубых орбитальных данных неортогональная система координат может быть любой системой осей, в которой одна из осей всегда образует относительно небольшой угол относительно оси Ra, даже если она имеет другое начало, чем система 23 координат (Ra, At, Xt). Она будет включать в себя, например, систему координат, в которой одной осью является Ra, но другими двумя осями являются азимут и угол возвышения спутников, а также любые другие варианты для других двух осей.
Кроме того, любая система осей, в которой некоторая ось является параллельной линии, вытянутой от некоторой точки вблизи оцененного местоположения спутника до некоторой точки вблизи местоположения приемника на Земле, попадает в объем настоящего изобретения. Хотя на фигуре 2 показана ось Ra, указывающая на центр Земли, ось, которая указывает на любую точку вблизи приемника на грунте или на любую другую, поддающуюся определению начальную точку, попадает в объем настоящего изобретения.
Кроме того, в объеме изобретения местоположение начала системы 23 координат (Ra, At, Xt) может быть изменено. Начало в точке нахождения спутника является предметом математического удобства. В частности, начало, заданное в действительном или точно спрогнозированном месте нахождения спутника (в противоположность оценке места нахождения спутника, как в системе 23 координат (Ra, At, Xt)), находится в объеме изобретения.
В течение определенного периода времени (например 6-часового периода времени) каждое из трех пространственных измерений поправочных данных может быть выражено как функция времени в выбранной системе координат, такой как система 23 координат (Ra, At, Xt). Теоретически, поправочные данные можно точно представлять полиномами бесконечной степени. Однако на практике поправочные данные можно аппроксимировать полиномами относительно низкой степени, например шестой, седьмой или другой низкой степени. Поэтому большое число полиномиальных членов и связанных с ними коэффициентов усекается; только небольшая относительная часть полиномиальных членов и связанных с ними коэффициентов используется в качестве приближения к поправочным данным. В дополнение к пространственным поправкам полином низкой степени (например, первой степени или любой подходящей низкой степени) можно использовать для описания параметров коррекции часов, которые представляют собой приближение разности между отметкой времени часов в грубых орбитальных данных и спрогнозированной ошибкой часов. Другие прогнозы точных показаний часов, которые имеются в сервере 130 содействия определению местоположения, также могут использоваться в качестве спрогнозированной ошибки часов, например информация о показаниях часов в орбитальных данных в реальном времени при наличии таковых.
Специалисту в данной области техники должно быть понятно, что настоящее изобретение содержит разложение поправочных данных в ряд функций с возможностью повышения точности в разложении, поскольку используется большее количество функций. Нет необходимости в том, чтобы ряд функций был возрастающих степеней x, вследствие чего поправочные данные будут представляться в виде полинома. Специалисту в данной области техники должно быть понятно, что поправочные данные также можно разлагать в другой ряд функций, включающих в себя гармоническую функцию, полиномы Эрмита, полиномы Лежандра, косинусоидальную и синусоидальную функции (разложение Фурье) и коэффициенты орбитальных функций Кеплера. Этот перечень является иллюстративным, но не исчерпывающим. Разложение поправочных данных в любой ряд функций находится в объеме изобретения.
Четыре пространственных и временных набора полиномиальных коэффициентов посылаются на мобильную станцию 120 вместе с информацией, необходимой для связи этих коэффициентов с конкретным спутником, конкретным временным интервалом и конкретной копией грубых орбитальных данных. Мобильная станция 120 принимает новую копию грубых орбитальных данных с заданной периодичностью (например, приблизительно один раз в неделю или с другими подходящими временными интервалами). Сервер 130 содействия определению местоположения вычисляет поправочные данные с использованием такой же версии грубых орбитальных данных, как и версия, используемая мобильной станцией 120. Поэтому на мобильной станции 120 могут использоваться грубые орбитальные данные, которые на ней регистрируются или которые передаются сервером 130 содействия определению местоположения, при условии, что поправочные данные применяются к соответствующим грубым орбитальным данным, которые в сервере 130 содействия определению местоположения используются при определении поправок.
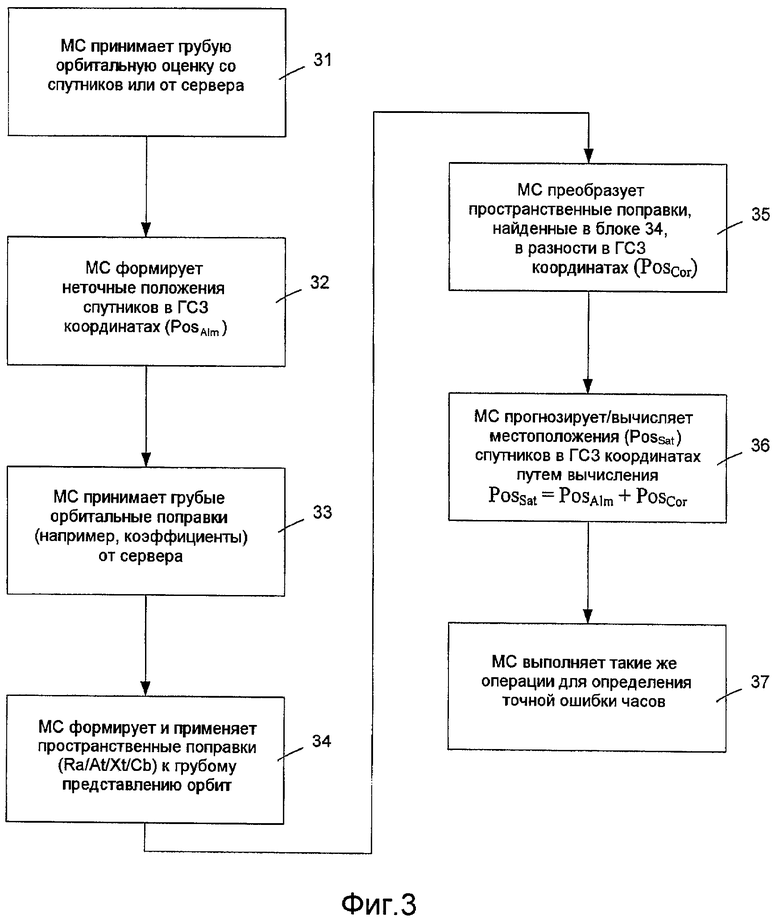
На фигуре 3 показан пример операций, выполняемых мобильной станцией (МС) 120. Отметим, что процессы, показанные на фигуре 3, могут выполняться логическими схемами обработки информации, которые могут включать в себя программное обеспечение, аппаратное обеспечение или сочетание обоих. Если только в мобильной станции 120 имеется полиномиальные коэффициенты и время применимости, мобильная станция может восстанавливать точные прогнозы положения спутника и ошибку часов. Для любого конкретного момента времени в течение периода применимости коэффициентов мобильная станция 120 может находить положение спутника и ошибку часов в пределах заданного диапазона точности.
В блоке 31 мобильная станция 120 принимает грубые орбитальные данные (например, данные альманаха) со спутников в пределах видимости или от сервера 130 содействия определению местоположения. Часто предпочтительно и более эффективно, чтобы мобильная станция 120 принимала грубые орбитальные данные от сервера 130 содействия определению местоположения, поскольку загрузка таких данных со спутников может занять много минут. Сервер 130 содействия определению местоположения может предоставлять мобильной станции 120 грубые орбитальные данные в сообщении/файле вместе с поправочными данными. Понятно, что «поправочные данные», относящиеся к мобильной станции 120, могут быть приближением к поправке, вычисленной на сервере 130 содействия определению местоположения. В блоке 32 мобильная станция 120 формирует положения спутников в геоцентрических, связанных с Землей (ГСЗ) координатах, используя свою копию грубых орбитальных данных. Положения спутников, вычисленные на основании грубых орбитальных данных и представленные в стандартной системе координат, например в геоцентрических, связанных с Землей координатах, обозначены PosAlm (в данном случае нижний индекс «Alm», который символизирует «альманах», используется в качестве примера грубых орбитальных данных). В блоке 33 мобильная станция 120 принимает коэффициенты одного или нескольких рядов математических функций от сервера 130 содействия определению местоположения. В блоке 34 мобильная станция 120 восстанавливает пространственные поправочные данные по грубым орбитальным данным для времени применимости (например, текущего времени) путем оценивания математических функций для текущего времени с использованием принятых коэффициентов. В блоке 35 мобильная станция 120 преобразует пространственные поправки, найденные в блоке 34, из системы координат (например, системы 23 координат (Ra, At, Xt) из фигуры 2) в геоцентрические, связанные с Землей координаты. Преобразованные поправки обозначены PosCor. После этого в блоке 36 мобильная станция 120 вычисляет местоположения (PosSat) спутников в геоцентрических, связанных с Землей координатах путем вычисления PosSat=PosAlm+PosCor. В блоке 37 мобильная станция 120 выполняет такие же операции, что и в блоках 34 и 36, для определения точной ошибки часов. Понятно, что операции мобильной станции могут осуществляться в порядке, отличающемся от описанного выше, и также могут выполняться дополнительные операции. Например, в блоке 36 вместо вычисления PosSat=PosAlm+PosCor может выбираться применение PosCor в пространстве расстояний, RSat=RAlm+RCor, где R представляет собой вычисленное расстояние от мобильной станции 120 до спутника.
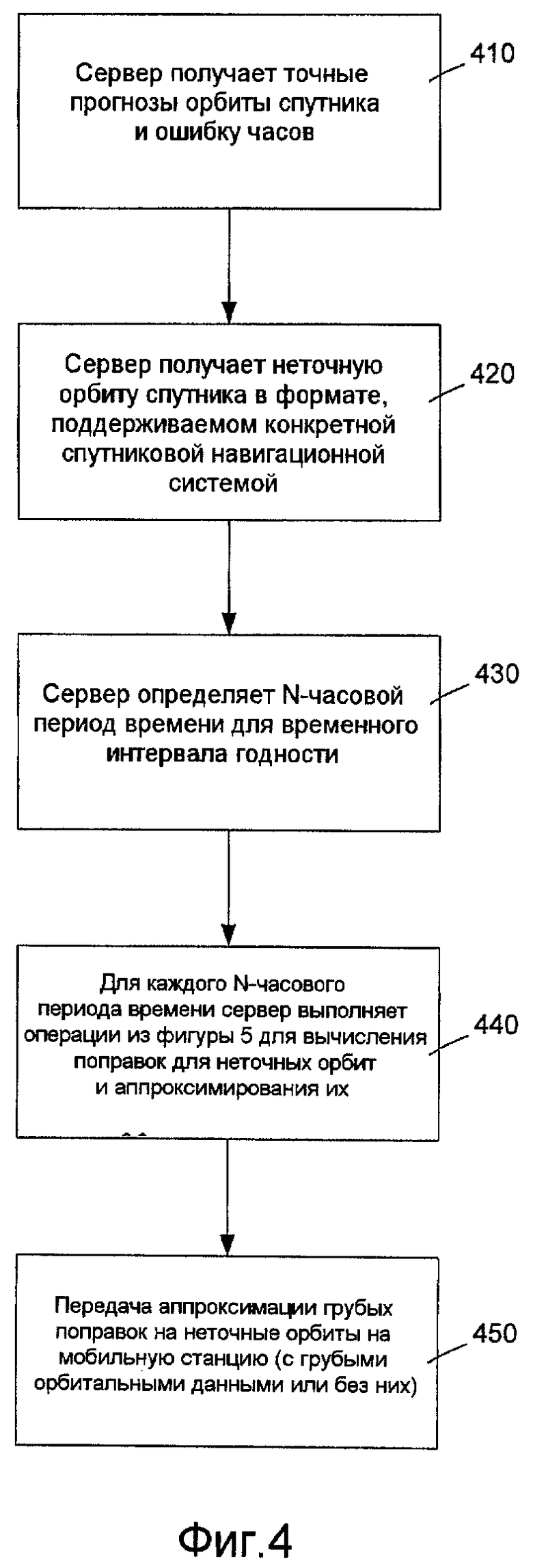
На фигуре 4 показан пример операций, выполняемых сервером 130 содействия определению местоположения. Отметим, что процессы, показанные на фигуре 4, могут выполняться логическими схемами обработки информации, которые могут включать в себя программное обеспечение, аппаратное обеспечение или сочетание обоих. Сервер 130 содействия определению местоположения вычисляет полиномиальные коэффициенты, которые описывают поправочные данные, при выполнении последующих операций.
В блоке 410 сервер 130 содействия определению местоположения получает точные орбитальные данные для орбит спутников и ошибки часов, например, из широковещательных сигналов спутников или от внешнего провайдера данных. Точные орбитальные данные являются достоверными в течение определенного периода достоверности. В блоке 420 сервер 130 содействия определению местоположения получает грубые орбитальные данные в формате, поддерживаемом конкретной спутниковой навигационной системой. В блоке 430 сервер 130 содействия определению местоположения определяет, разделить ли период достоверности на несколько N-часовых временных интервалов годности или использовать весь период достоверности в качестве одного временного интервала годности. В данном случае временным интервалом годности называется период времени, для которого полиномиальные коэффициенты вычисляются, чтобы описать поправочные данные этого периода времени. Примером временного интервала годности являются 4-6 ч, хотя также можно использовать другие периоды времени. Если сервер 130 содействию определению местоположения имеет точные орбитальные данные с продолжительным периодом достоверности, то сервер содействия определению местоположения может разделить точные орбитальные данные на множество временных интервалов годности для повышения точности соответствий. В блоке 440 для каждого N-часового временного интервала годности сервер 130 содействия определению местоположения выполняет операции, описанные ниже на фигуре 5, для вычисления поправочных данных и аппроксимирования их. В блоке 450 сервер 130 содействия определению местоположения передает приближение поправочных данных на мобильную станцию 120.
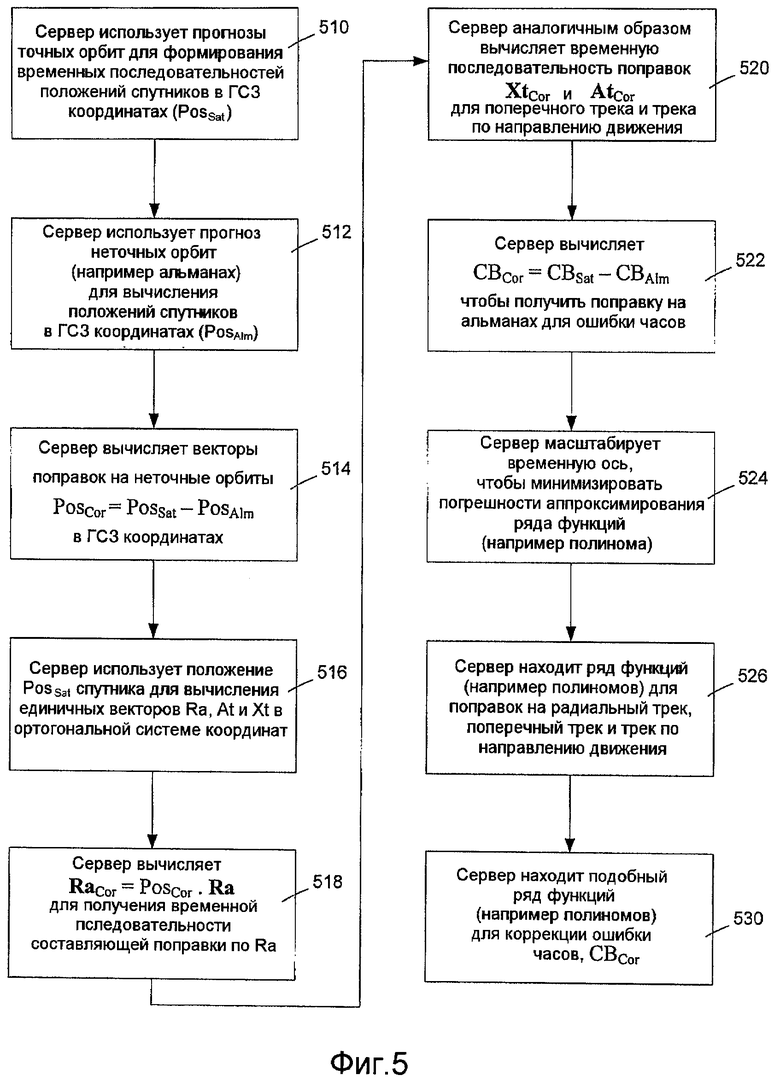
Обратимся к фигуре 5, где в блоке 510 сервер 130 содействия определению местоположения использует точные орбитальные данные, чтобы сформировать временную последовательность положений спутников в геоцентрических, связанных с Землей (ГСЗ) координатах. Эти положения спутников обозначаются PosSat. В блоке 512 сервер 130 содействия определению местоположения использует грубые орбитальные данные, чтобы вычислить положения спутников в геоцентрических, связанных с Землей координатах. Эти положения спутников обозначаются PosAlm. В блоке 514 сервер содействия определению местоположения вычисляет векторы (PosCor) поправочных данных в геоцентрических, связанных с Землей координатах путем вычисления PosCor=PosSat-PosAlm. В блоке 516 сервер 130 содействия определению местоположения использует положение PosSat спутника для вычисления единичных векторов Ra, Xt и At в ортогональной системе 23 координат или в других системах координат, описанных выше. В блоке 518 временная последовательность составляющей коррекции по радиальной оси Ra находится путем вычисления скалярного произведения Ra Cor=PosCor ·Ra. В блоке 520 аналогичным образом вычисляются временные последовательности Xt Cor и At Cor поперечного трека и трека по направлению движения. В блоке 522 поправочные данные для ошибки часов вычисляются как CBCor=CBSat-CBAlm, где CBSat и CBAlm представляют собой поправки часов с использованием точной модели часов и грубой оценки из модели часов, соответственно.
В блоке 524 сервер 130 содействия определению местоположения может масштабировать и/или нормировать временную ось полиномиальной интерполяции для улучшения характеристик интерполяции. Предполагается, что в сервере 130 содействия определению местоположения и мобильной станции 120 используются одни и те же множители масштабирования и/или нормирования для правильного восстановления поправочных данных в программном обеспечении мобильной станции.
В блоке 526 сервер 130 содействия определению местоположения находит полиномиальные коэффициенты для интерполирования поправок Ra Cor, At Cor и Xt Cor, радиальной, для трека по направлению движения и поперечного трека. Полиномиальные коэффициенты (Ra0, Ra1, … Raj) для Ra Cor выбираются так, что Ra0f0(d)+Ra1f1(d)+…+Rajfj(d) является хорошим приближением к Ra Cor, где d представляет собой точку поправочных данных и f0, f1,…fj являются интерполирующими функциями. Коэффициенты могут быть выбраны из условия минимальной среднеквадратической ошибки полиномиальных приближений Ra Cor. Сервер 130 содействия определению местоположения аналогичным образом находит полиномиальный коэффициенты для Xt Cor и At Cor так, чтобы эти коэффициенты Xt0, Xt1, Xt2, …, Xtk, At0, At1, …, Atm обеспечивали хорошие приближения к Xt Cor и At Cor. В заключение в блоке 530 сервер 130 содействия определению местоположений находит коэффициенты интерполирующих функций для коррекции CBCor ошибки часов. Понятно, что число членов-коэффициентов для представления поправок в каждом из пространственных и временном измерениях может не быть одним и тем же. Большее количество коэффициентов для измерения обычно соответствует более высокой точности при представлении поправочных данных в этом измерении.
Операции из блоков 510-530 повторяются, если имеются несколько N-часовых временных интервалов годности в течение периода достоверности. Порядок операций может отличаться от описанного выше и могут быть включены дополнительные операции.
Поправочные данные, формируемые сервером 130 содействия определению местоположения из фигуры 1, могут быть глобальными или локальными. Когда местоположение мобильной станции 120 полностью неизвестно или местоположение не может быть оценено с точностью нескольких сотен километров, сервер 130 содействия определению местоположения создает глобальное сообщение для мобильной станции. Для получения точных положений спутников глобальные сообщения могут посылаться на мобильные станции, расположенные на Земле где-угодно. Локальные сообщения являются более краткими, но они являются точными только в пределах радиуса в несколько сотен километров от некоторой намеченной опорной точки на поверхности Земли. Поэтому более короткие локальные сообщения могут посланы, когда заранее известно, что мобильная станция находится в пределах нескольких сотен километров. Когда местоположение мобильной станции неизвестно, на мобильную станцию могут посылаться глобальные сообщения. Различие между глобальным сообщением и локальным сообщением описывается ниже.
В глобальном сообщении центр Земли используется как начальная точка системы координат (Ra, At, Xt). Ошибки альманаха имеют четыре независимых измерения (три пространственных измерения и ошибку часов), глобальное сообщение включает в себя четыре полинома, три для соответствия ортогональным пространственным составляющим ошибки положения спутника и четвертый полином для более точного описания ошибки часов.
В локальном сообщении точка на поверхности Земли используется в качестве начальной точки системы координат (Ra, At, Xt). Обычно в сервере 130 содействия определению местоположения оценка текущего местоположения мобильной станции используется в качестве начальной точки (например, местоположение мачты антенны сотовой связи, с которой мобильная станция находится на связи). Локальное сообщение содержит единственный полином, подобранный для коррекции. Одномерная коррекция включает в себя коррекцию на пространственное расстояние до спутника (также называемое псевдодальностью), а также коррекцию ошибки часов. Поскольку посылается только один полином, локальное сообщение является значительно более коротким, чем глобальное сообщение.
Поправка на псевдодальность вычисляется для начальной точки, которая в идеальном случае находится по возможности близко к месту, где мобильная станция фактически расположена. При условии, что мобильная станция находится от оцененной начальной точки на расстоянии в пределах около 100 км, результат позиционирования является достаточно точным. Точность медленно ухудшается по мере того, как истинное положение мобильной станции отличается больше чем на 100 км от оцененной начальной точки. Мобильная станция может определять ухудшение точности позиционирования путем сначала вычисления своего местоположения и затем сравнения местоположения с начальной точкой из поправочных данных.
Согласно другому аспекту в мобильной станции 120 из фигуры 1 может использоваться сочетание орбитальных данных для определения положений спутников и показаний часов. В некоторых вариантах мобильная станция 120 принимает орбитальные данные в реальном времени (например, эфемериды) в дополнение к поправочным данным. В случае единственного спутника мобильная станция 120 может использовать орбитальные данные в реальном времени для одного периода времени, скорректированные орбитальные данные (которые содержат поправочные данные, применяемые к грубым орбитальным данным) для другого периода времени и сочетание (например, взвешенное среднее) обоих данных для еще одного периода времени. Для определения своего местоположения по нескольким спутникам на мобильной станции 120 могут использоваться орбитальные данные в реальном времени для одного спутника, скорректированные орбитальные данные для другого спутника и сочетание обоих данных для еще одного спутника. Специалисту в данной области техники должно быть понятно, что различные сочетания, описанные выше, являются только иллюстративными. Любое сочетание, по времени или различных спутников, орбитальных данных в реальном времени и скорректированных орбитальных данных может быть использовано мобильной станцией 120.
Согласно одному аспекту мобильная станция 120 может использовать декодированные орбитальные данные в реальном времени со спутников всякий раз, когда орбитальные данные в реальном времени являются доступными. Орбитальные данные в реальном времени обычно являются более точными, чем более ранние спрогнозированные орбитальные данные, которые могут постепенно ухудшаться на протяжении периода времени. Поэтому скорректированные орбитальные данные, которые аппроксимируют спрогнозированные орбитальные данные, также постепенно ухудшаются со временем. Кроме того, орбитальные данные реального времени могут содержать новую информацию о спутниках, неизвестную во время выполнения прогнозов (например, информацию о «здоровье» и целостности спутника). Однако иногда орбитальные данные в реальном времени недоступны для мобильной станции 120 вследствие отсутствия прямой видимости, затенения или других проблем приема, которые препятствуют мобильной станции 120 принимать спутниковые широковещательные передачи. Когда орбитальные данные в реальном времени недоступны, мобильная станция 120 может переключиться на поправочные данные, описанные выше на фигурах 2-5 выше, для определения местоположения спутников. Поэтому в зависимости от доступности орбитальных данных в реальном времени мобильная станция 120 может использовать скорректированные орбитальные данные для одного периода времени и орбитальные данные реального времени для другого периода времени. Для определения своего собственного положения в любой момент времени мобильная станция 120 может использовать скорректированные орбитальные данные от одного или нескольких спутников и орбитальные данные в реальном времени от одного или нескольких других спутников.
В предшествующем абзаце описан случай, когда скорректированные орбитальные данные могли быть заменены доступными орбитальный данными в реальном времени для продления достоверности орбитальных данных в реальном времени. Например, после того как эфемериды не будут больше достоверными (+/- 2 ч от эпохи эфемерид), мобильная станция 120 может переключиться обратно на скорректированные орбитальные данные. В качестве варианта орбитальные данные в реальном времени из раннего периода времени могут использоваться для повышения точности скорректированных орбитальных данных. Например, мобильная станция 120 может использовать орбитальные данные в реальном времени для определения степени изменения параметром, применяемого для будущего периода времени скорректированных орбитальных данных, которые можно использовать, когда орбитальные данные реального времени являются недоступными (или несостоятельными). Это особенно полезно для часов спутников, поскольку метка времени часов не является столь предсказуемой, как траектория спутника. В простом случае скорректированные показания часов искусственного спутника можно оценивать при сравнении с широковещательными параметрами часов спутника в реальном времени (например, из подкадра 1 навигации на основе глобальной системы позиционирования), чтобы определять степень изменения показаний скорректированных часов. Изменение параметров (например, включающее в себя дифференциальный сдвиг и наклон) можно применять к скорректированной информации о показаниях часов для использования в случае, когда показание часов в реальном времени недоступно. В более сложном случае изменение параметров может быть осуществлено для всех скорректированных орбитальных данных, включая положения спутников в трех пространственных измерения и показания часов спутников.
Кроме того, орбитальные данные в реальном времени и спрогнозированные орбитальные данные можно взвешивать в соответствии с их точными оценками. Мобильная станция 120 может соответствующим образом взвешивать имеющиеся результаты спутниковых измерений в решении для своего положения и учитывать ухудшающуюся точность спрогнозированных данных. Оценки точности для орбитальных данных в реальном времени и спрогнозированных орбитальных данных известны как «оценка ошибки точных или краткосрочных спрогнозированных данных» и «оценка ошибки долгосрочных спрогнозированных данных», соответственно. Например, альманах содержит оценку неопределенности в виде пользовательской ошибки дальности (вычисленной или предоставленной сервером 130 содействия определению местоположения), а эфемериды в реальном времени содержат оценку неопределенности в виде пользовательской точности дальности (предоставляемой, например, сегментом управления и контроля глобальной системы позиционирования). Пользовательская точность дальности (URA) обычно составляет пару метров, а пользовательская ошибка дальности (URE) может составлять десятки метров после пары дней. Например, обе оценки ошибок могут быть использованы в качестве весов в модели взвешенных наименьших квадратов. Веса можно вычислять как: W(краткосрочной спрогнозированной орбиты)=1/URA2 и Wдолгосрочной спрогнозированной орбиты)=1/URE2.
В частности, результаты спутниковых измерений с меньшими ошибками положений спутников (представленные URA в приведенном выше примере) взвешиваются с более высоким весом, чем результаты спутниковых измерений с большими ошибками спрогнозированных положений спутников (представленные URE в приведенном выше примере). Результаты спутниковых измерений применительно к решению для положения, скорости, времени или любому сочетанию из решения для положения/скорости/времени можно взвешивать. Взвешенное решение для положения/скорости/времени можно вычислять на основании результатов спутниковых измерений с помощью модели взвешенных наименьших квадратов или фильтра Калмана, или любого другого линейного, линеаризованного или нелинейного метода оценивания.
Чтобы вычислить суммарную ошибку результатов измерений, во время вычислений положения/скорости/времени на мобильной станции 120 оценки ошибок позиционирования спутников (эфемериды реального времени (пользовательские точности дальности) или спрогнозированные орбитальные ошибки (пользовательские ошибки дальности) комбинируются с измеренными ошибками псевдодальностей (обусловленными уровнем сигнала, атмосферой, квантованием, преобразованием радиочастотного сигнала в цифровую форму и т.д.). Иначе говоря, суммарная ошибка псевдодальности на мобильной станции 120: дисперсия суммарной ошибки измерения = дисперсия ошибки позиционирования спутника + дисперсия ошибки измерения.
Кроме того, когда на мобильной станции 120 набор информации об орбитах в реальном времени и спрогнозированных орбитах от нескольких спутников используется для определения ее собственного местоположения, дополнительный результат спутникового измерения можно использовать, чтобы находить решение для спрогнозированной погрешности часов спутников. Этот дополнительный результат спутникового измерения может представлять собой орбитальные данные в реальном времени для спутника и может быть использован для оценивания спрогнозированной погрешности часов того же самого спутника. В качестве варианта дополнительный результат спутникового измерения может представлять собой орбитальные данные в реальном времени для первого спутника и может быть использован для оценивания спрогнозированной погрешности часов второго спутника. Спрогнозированная погрешность часов может быть удалена из показания корректируемых часов для повышения точности показания корректируемых часов, вычисленной на мобильной станции. Таким образом орбитальные данные в реальном времени и поправочные данные часов спутников могут быть использованы для осуществления изменения в реальном времени информации о спрогнозированном показании часов спутников.
Поскольку спрогнозированное показание часов спутника ухудшается быстрее, чем спрогнозированные положения спутника, дополнительный результат спутникового измерения может быть использован совместно со спрогнозированными положениями спутника для вычисления спрогнозированных погрешностей часов спутника и осуществления изменений в спрогнозированных показаниях часов для использования в будущем. Аналогичным образом, если текущие орбитальные данные в реальном времени доступны для по меньшей мере одного дополнительного спутника в пределах видимости, то эти данные в реальном времени можно использовать совместно с результатами измерений псевдодальности этого спутника и скорости изменения дальности для вычисления спрогнозированной погрешности спутниковых часов другого спутника в пределах видимости. Для двумерной оценки положения (имеются некоторые сведения об угловой высоте) необходимы по меньшей мере четыре спутника в пределах видимости для оценивания спрогнозированной погрешности спутниковых часов для одного спутника. Для трехмерной оценки положения необходимы по меньшей мере пять спутников в пределах видимости для оценивания спрогнозированной погрешности спутниковых часов для одного спутника. Каждый дополнительный спутник можно использовать для оценивания еще одной спрогнозированной погрешности спутниковых часов. Например, в трехмерном случае (с четырьмя неизвестными), если доступны результаты измерений от 7 спутников, прогнозируемые погрешности спутниковых часов можно оценивать для трех спутников.
На фигуре 6А показан пример структурной схемы сервера 130 содействия определению местоположения из фигуры 1. Сервер 130 содействия определению местоположений включает в себя запоминающее устройство 604 и процессор 605. Сервер 130 содействия определению местоположения также включает в себя защищенный интерфейс 61 для защищенного приема спрогнозированных орбитальных данных от внешнего провайдера данных, интерфейс 62 приемника для приема широковещательных данных (например, альманаха), а также информации, передаваемой по сети (например, спрогнозированных орбитальных данных), и интерфейс 65 передатчика для передачи коэффициентов на мобильную станцию 120, предназначенных для определения прогнозируемых орбитальных данных спутника. Интерфейс 65 передатчика может передавать коэффициенты по проводным и беспроводным сетям, через широковещательное средство или любое подходящее средство передачи данных.
В одном варианте сервер 130 содействия определению местоположения также может включать в себя блок 63 коррекции для вычисления разностей («поправки») между грубыми орбитальными данными и спрогнозированными орбитальными данными. Сервер 130 содействия определению местоположения также может включать в себя аппроксимирующий блок 64 для вычисления приближения поправки с использованием системы координат, которая выбирается так, чтобы изменение поправки было по существу плавным с течение времени (например, системы 23 координат (Ra, At, Xt) из фигуры 2). В одном варианте приближение вычисляется путем интерполирования точек поправочных данных с использованием одной или нескольких математических функций низшего порядка. Кодирующий блок 610 кодирует приближение для передачи на мобильную станцию 120.
На фигуре 6В представлен пример структурной схемы компонентов мобильной станции 120. Мобильная станция 120 включает в себя запоминающее устройство 608 и процессор 609. Мобильная станция 120 также включает в себя интерфейс 66 приемника для приема последовательностей коэффициентов от сервера 130 содействия определению местоположения. Интерфейс 66 приемника также принимает грубые орбитальные данные и/или орбитальные данные в реальном времени, например альманах, эфемериды и/или другую информацию о положении и метке времени спутника, от спутниковых широковещательных станций, от сервера 130 содействия определению местоположения или от других источников данных. Интерфейс 66 приемника может принимать коэффициенты по проводным и беспроводным сетям, через широковещательное средство или любое подходящее средство передачи данных. Мобильная станция 120 включает в себя декодирующий блок 620 для декодирования последовательностей коэффициентов, посылаемых с сервера 130 содействия определению местоположения. В одном варианте мобильная станция 120 может включать в себя оценивающий блок 602, преобразующий блок 68 и восстанавливающий блок 67. Оценивающий блок 602 оценивает математические функции, используя коэффициенты и время применимости (например, текущее время). Преобразующий блок 68 преобразует оцененный результат из системы координат, используемой сервером 130 содействия определению местоположения (например, из системы 23 координат (Ra, At, Xt) из фигуры 2), в геоцентрическую, связанную с Землей систему координат. Затем восстанавливающий блок 67 восстанавливает спрогнозированные орбитальные данные путем применения результата преобразования к грубым орбитальным данным.
В зависимости от применения методики, описанные в настоящей заявке, могут быть реализованы различными средствами. Например, указанные выше компоненты сервера 130 содействия определению местоположения и мобильной станции 120 могут быть реализованы в аппаратном обеспечении, микропрограммных средствах, программном обеспечении или в сочетании из них. В случае реализации в аппаратном обеспечении блоки обработки могут быть реализованы в рамках одной или нескольких специализированных интегральных схем (ASIC), процессоров для цифровой обработки сигналов (DSP), устройств для цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), логических микросхем (FPGA), программируемых в условиях эксплуатации, процессоров, контроллеров, микроконтроллеров, микропроцессоров, электронных устройств, других электронных блоков, предназначенных для выполнения функций, описанных в настоящей заявке, или сочетаний из них.
В случае реализации микропрограммными средствами или программным обеспечением методики могут быть реализованы модулями (например, процедурами, функциями и т.д.), которые выполняют функции, описанные выше. Любой машиночитаемый носитель, реально заключающий в себе команды, может быть использован при реализации методик, описанных в настоящей заявке. Например, снова обратимся к фигурам 6А и 6В, где коды программного обеспечения могут сохраняться в запоминающем устройстве (например, запоминающем устройстве 604 сервера 130 обеспечения содействия определению местоположения и запоминающем устройстве 608 мобильной станции 120) и выполняться процессором (например, процессором 605 сервера 130 содействия определению местоположения и процессором 608 мобильной станции 120). Запоминающее устройство может быть реализовано в процессоре или как внешнее по отношению к процессору. Использованный в настоящей заявке термин «запоминающее устройство» относится к долговременному, кратковременному, энергозависимому, энергонезависимому или другому запоминающему устройству любого типа и не ограничен никаким конкретным типом запоминающего устройства или числом запоминающих устройств или типом среды, на основе которой запоминающее устройство реализуется.
Способ и устройство, описанные в настоящей заявке, могут быть использованы совместно с различными спутниковыми системами позиционирования (SPS) или глобальной навигационной спутниковой системой (GNSS), такими как, но без ограничения ими, глобальная система позиционирования США, российская система «ГЛОНАСС», европейская система «Галилео», любая система, в которой используются спутники из сочетания спутниковых систем, или любая спутниковая система, которая будет разработана в будущем. Кроме того, раскрытые способ и устройство могут быть использованы совместно с системами определения местоположения, в которых используются псевдолиты или сочетание спутников и псевдолитов. Псевдолиты представляют собой наземные передатчики, которые передают псевдослучайный код или другой код дальности (такой же, как в глобальной системе позиционирования, или сотовый сигнал системы многостанционного доступа с кодовым разделением (CDMA)), модулированный на несущем сигнале L-диапазона (или на другой частоте), который может быть синхронизирован со временем глобальной системы позиционирования. Каждому такому передатчику можно назначать уникальный псевдослучайный код с тем, чтобы обеспечивать идентификацию удаленным приемником. Псевдолиты являются полезными в ситуациях, когда сигналы глобальной системы позиционирования от обращающихся по орбите спутников могут быть недоступными, например в туннелях, шахтах, зданиях, городских теснинах и на других закрытых участках. Другая реализация псевдолитов известна как радиомаяки. Термин «спутник», использованный в настоящей заявке, предполагается включающим в себя псевдолиты, эквиваленты псевдолитов и по возможности другие. Термин «сигналы глобальной системы позиционирования», использованный в настоящей заявке, предполагается включающим в себя сигналы от псевдолитов или эквивалентов псевдолитов, аналогичные сигналам глобальной системы позиционирования.
Способы определения положения, описанные в настоящей заявке, могут быть использованы применительно к различным беспроводным сетям связи, таким как беспроводная региональная сеть (WWAN), беспроводная локальная сеть (WLAN), беспроводная персональная сеть (WPAN) и т.д. Термины «сеть» и «система» часто используются на равных основаниях. Беспроводная региональная сеть (WWAN) может быть сетью многостанционного доступа с кодовым разделением (CDMA), сетью многостанционного доступа с временным разделением каналов (TDMA), сетью многостанционного доступа с частотным разделением каналов (FDMA), сетью многостанционного доступа с ортогональным частотным разделением каналов (OFDMA), сетью многостанционного доступа с частотным разделением каналов на одной несущей (SC-FDMA) и т.д. Сетью многостанционного доступа с кодовым разделением (CDMA) может реализовываться одна или несколько технологий радиодоступа (RAT), таких как многостанционный доступ с кодовым разделением третьего поколения (CDMA-2000), широкополосный многостанционный доступ с кодовым разделением (W-CDMA) и т.д. Многостанционный доступ с кодовым разделением третьего поколения (CDMA-2000) охватывает временные стандарты IS-95, IS-2000 и IS-856. Сетью многостанционного доступа с временным разделением каналов (TDMA) может реализовываться глобальная система подвижной связи (GSM), цифровая модификация усовершенствованной системы мобильной телефонной связи (D-AMPS) или некоторые другие технологии радиодоступа. Глобальная система подвижной связи (GSM) и система широкополосного многостанционного доступа с кодовым разделением (W-CDMA) описаны в документах консорциума под названием “3rd generation partnership project” (3GPP). Система многостанционного доступа с кодовым разделением третьего поколения (CDMA-2000) описана в документах консорциума под названием “3rd generation partnership project 2” (3GPP2). Документы 3GPP и 3GPP2 являются общедоступными. Беспроводная локальная сеть (WLAN) может быть сетью IEEE 802.11x, а беспроводная персональная сеть (WPAN) может быть сетью Bluetooth (по технологии беспроводного обмена данными между разнообразными устройствами), IEEE 802.15x, или некоторого другого типа. Способы также могут использоваться применительно к любому сочетанию из беспроводной региональной сети (WWAN), беспроводной локальной сеть (WLAN) и/или беспроводной персональной сети (WPAN).
Хотя настоящее изобретение было описано с обращением к конкретным примерам особенностей, очевидно, что различные модификации и изменения могут быть сделаны к этим особенностям без отступления от широкой сущности и объема изобретения, изложенных в формуле изобретения. Поэтому описание и чертежи должны рассматриваться как иллюстративные, а не ограничивающие.
Изобретение относится к спутниковой системе позиционирования, а более конкретно к содействию мобильной станции в определении местоположения спутника с использованием эффективного формата передачи сообщения. Технический результат заключается в повышение точности определения положений и времени спутников на мобильной станции. Для этого вычисляют поправку с помощью процессора сервера между первыми орбитальными данными спутника и вторыми орбитальными данными спутника, причем вторые орбитальные данные являются более точными, чем первые орбитальные данные. Затем преобразуют пространственные составляющие поправки из первой системы координат во вторую систему координат, причем вторую систему координат выбирают так, что изменение поправки во второй системе координат является плавным с течением времени. Затем передают поправку из сервера на мобильную станцию для обеспечения возможности мобильной станции оценивать более точные орбитальные данные для спутника посредством применения поправки к первыми орбитальным данным спутника, сохраненным на мобильной станции, причем поправка, закодированная во второй системе координат, представлена одним или более полиномов. 8 н. и 66 з.п.ф-лы, 7 ил.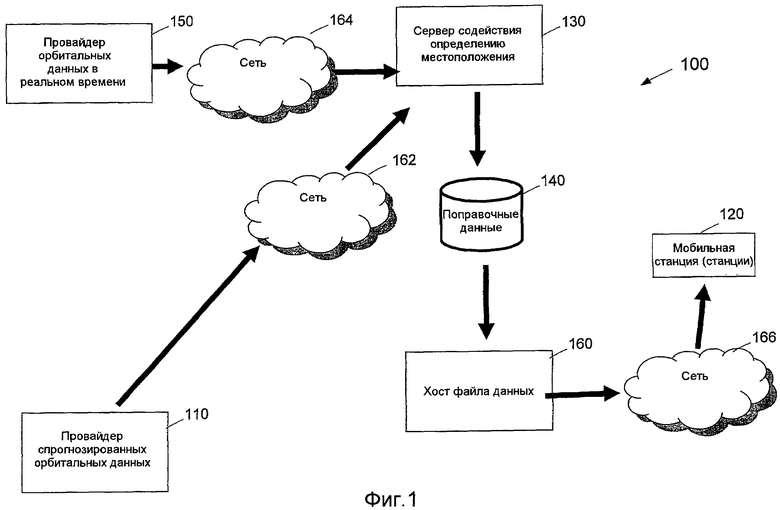
1. Способ содействия мобильной станции в получении орбитальной информации спутника, содержащей этапы, на которых:
вычисляют поправку с помощью процессора сервера между первыми орбитальными данными спутника и вторыми орбитальными данными спутника, причем вторые орбитальные данные спутника являются более точными, чем первые орбитальные данные спутника; и
преобразуют пространственные составляющие поправки из первой системы координат во вторую систему координат с использованием процессора сервера, причем вторую систему координат выбирают так, что изменение поправки во второй системе координат является по существу плавным с течением времени, и передают поправку, закодированную во второй системе координат из сервера на мобильную станцию для обеспечения возможности мобильной станции оценивать более точные орбитальные данные для спутника посредством применения поправки к первым орбитальным данным спутника, сохраненным на мобильной станции, причем поправка, закодированная во второй системе координат, представлена одним или более полиномов.
2. Способ по п.1, дополнительно содержащий этап, на котором:
аппроксимируют поправку во второй системе координат, чтобы уменьшить число битов, используемых для передачи на мобильную станцию.
3. Способ по п.2, в котором указанное аппроксимирование поправки содержит этап, на котором:
используют коэффициенты одного или более полиномов в качестве аппроксимированной поправки.
4. Способ по п.1, в котором полиномы представляют собой один или более полиномов Эрмита или полиномов Лежандра.
5. Способ по п.1, в котором вторая система координат имеет оси, которые движутся вместе со спутником.
6. Способ по п.5, в котором вторая система координат содержит радиальную ось, при этом радиальная ось является параллельной или совпадающей с линией, которая соединяет начальную точку с оцененным положением спутника.
7. Способ по п.6, в котором вторая система координат дополнительно включает в себя ось поперечного трека, перпендикулярную к радиальной оси и направлению движения спутника.
8. Способ по п.2, в котором указанное аппроксимирование поправки содержит этапы, на которых:
используют местоположение мобильной станции в качестве начальной точки для второй системы координат; и
передают аппроксимированную поправку из серверной вычислительной платформы к мобильной станции как одномерные данные, при этом поправка включает в себя пространственное измерение, объединенное с поправкой часов.
9. Способ по п.2, в котором указанное аппроксимирование поправки содержит этапы, на которых:
используют центр Земли в качестве начальной точки для второй системы координат; и
передают аппроксимированную поправку как четырехмерные данные, при этом поправка включает в себя три пространственных измерения второй системы координат и временное измерение для поправки часов.
10. Способ по п.1, в котором поправка по одному пространственному измерению является по существу более точной, чем по другим пространственным измерениям.
11. Способ по п.1, дополнительно содержащий этапы, на которых:
получают опорное время от сервера времени; и
передают опорное время вместе с оценкой положений спутника из сервера на мобильную станцию.
12. Способ по п.11, дополнительно содержащий этапы, на которых:
повышают точность опорного времени, получаемого от сервера времени; и
приобщают опорное время к оценке положений спутника, чтобы образовать сообщение для передачи на мобильную станцию.
13. Способ по п.1, дополнительно содержащий этапы, на которых:
аппроксимируют поправку для метки времени спутника; и
передают аппроксимированную поправку для метки времени спутника из сервера на мобильную станцию для определения ошибки часов спутника.
14. Способ по п.1, дополнительно содержащий этап, на котором:
передают поправку на файловый хост данных для осуществления доступа мобильной станцией.
15. Способ определения орбитальной информации спутника, содержащий этапы, на которых:
преобразуют поправку для орбитальных данных спутника из первой системы координат во вторую систему координат с помощью процессора; и применяют преобразованную поправку к первым орбитальным данным спутника с использованием процессора для оценки более точной орбитальной информации спутника, причем преобразованная поправка представлена одним или более полиномов.
16. Способ по п.15, в котором поправка в первой системе координат имеет по существу плавное изменение во времени.
17. Способ по п.15, в котором поправка в первой системе координат имеет более высокую точность по одному пространственному измерению, чем по другим пространственным измерениям.
18. Способ по п.15, в котором оси первой системы координат поворачиваются с движением спутника.
19. Способ по п.15, в котором одна или более осей первой системы координат определяются положением или движением спутника.
20. Способ по п.15, в котором преобразование и применение выполняются мобильной станцией.
21. Способ по п.15, дополнительно содержащий этапы, на которых:
на сервере вычисляют поправку для орбитальных данных спутника, причем сервер содержит процессор; и
на сервере с использованием процессора преобразуют поправку из второй системы координат в первую систему координат.
22. Способ определения орбитальной информации спутника мобильной станцией, содержащий этапы, на которых:
принимают поправку для первых орбитальных данных спутника на мобильной станции, причем первые орбитальные данные получены мобильной станцией, причем поправка представлена одним или более полиномов;
преобразуют с использованием процессора поправку, представленную одним или более полиномов из первой системы координат во вторую систему координат, при этом поправка, представленная в первой системе координат, имеет более высокую точность по одному пространственному измерению, чем по другим пространственным измерениям; и
применяют поправку к первым орбитальным данным для оценки более точной орбитальной информации спутника.
23. Способ по п.22, в котором первая система координат включает в себя три ортогональные оси.
24. Способ по п.22, в котором первая система координат включает в себя неортогональные оси.
25. Способ по п.22, в котором первая система координат включает в себя радиальную ось, при этом радиальная ось является параллельной или совпадающей с линией, которая соединяет начальную точку с оцененным положением спутника.
26. Способ по п.25, в котором начальная точка является центром Земли.
27. Способ по п.25, в котором начальная точка представляет собой оцененное местоположение мобильной станции.
28. Способ по п.22, в котором поправку представляют коэффициентами одного или более полиномов для каждого из пространственных измерений.
29. Способ по п.28, в котором полиномы представляют собой один или более полиномов Эрмита или полиномов Лежандра.
30. Способ определения орбитальной информации спутника мобильной станцией, содержащий этапы, на которых:
получают первые орбитальные данные спутника на мобильной станции из информации эфемерид, полученной из спутника;
принимают поправочные данные для первых орбитальных данных спутника на мобильной станции, причем поправочные данные представлены одним или более полиномов;
преобразуют с использованием процессора поправочные данные, представленные одним или более полиномов, из первой системы координат во вторую систему координат, при этом первую систему координат выбирают для плавного изменения поправки с течением времени; и
применяют поправочные данные к первым орбитальным данным с использованием процессора мобильной станции для оценки более точной орбитальной информации спутника.
31. Способ по п.30, дополнительно содержащий этап, на котором:
определяют положение и метку времени спутника на основании поправочных данных.
32. Способ по п.30, в котором указанный прием поправочных данных содержит этапы, на которых:
принимают последовательность коэффициентов одного или более полиномов для по меньшей мере одной оси первой системы координат; и
оценивают с помощью процессора мобильной станции один или более полиномов, используя последовательность коэффициентов и время применимости, чтобы получить поправочные данные.
33. Способ по п.32, в котором полиномы представляют собой один или более полиномов Эрмита или полиномов Лежандра.
34. Способ по п.30, в котором первая система координат содержит одну или более осей, которые движутся вместе со спутником.
35. Способ по п.34, в котором первая система координат включает в себя радиальную ось, при этом радиальная ось является параллельной или совпадающей с линией, которая соединяет начальную точку с оцененным положением спутника.
36. Способ по п.30, в котором первая система координат дополнительно включает в себя ось поперечного трека, перпендикулярную к радиальной оси и направлению движения спутника.
37. Способ по п.30, дополнительно содержащий этапы, на которых:
используют местоположение мобильной станции в качестве начальной точки для первой системы координат; и
принимают на мобильной станции коэффициенты одного или более полиномов, при этом коэффициенты представляют одномерные данные, которые включают в себя пространственное измерение, объединенное с поправкой часов.
38. Способ по п.30, дополнительно содержащий этапы, на которых:
используют центр Земли в качестве начальной точки для первой системы координат; и
принимают на мобильной станции коэффициенты одного или более полиномов, при этом коэффициенты представляют четырехмерные данные, которые включают в себя три пространственные измерения первой системы координат и временное измерение для поправки часов.
39. Способ по п.30, в котором поправочные данные представляют в первой системе координат с более высокой точностью по одному пространственному измерению, чем по другим пространственным измерениям.
40. Способ по п.30, дополнительно содержащий этап, на котором:
принимают опорное время от одного из следующих: сетевого сервера времени, сервера содействия определению местоположения, сети с коммутацией пакетов данных, или из данных глобальной системы позиционирования, принятых от опорного приемника.
41. Серверная система для формирования поправочных данных для получения орбитальной информации спутника мобильной станцией, содержащая:
корректирующий блок для вычисления поправки между первыми орбитальными данными спутника и вторыми орбитальными данными спутника, причем вторые орбитальные данные являются более точными, чем первые орбитальные данные, причем корректирующий блок дополнительно представляет пространственные составляющие поправки с использованием системы координат, имеющей оси, которые движутся вместе со спутником, причем поправка представлена одним или более полиномов, и
интерфейс передатчика для передачи поправки на мобильную станцию для обеспечения возможности мобильной станции оценивать более точные орбитальные данные для спутника посредством применения поправки к первым орбитальным данным спутника, сохраненным на мобильной станции.
42. Серверная система по п.41, дополнительно содержащая:
аппроксимирующий блок для аппроксимирования поправки в системе координат, чтобы уменьшить число битов, необходимых для передачи на мобильную станцию.
43. Серверная система по п.41, в которой полиномы представляют собой один или более полиномов Эрмита или полиномов Лежандра.
44. Серверная система по п.42, в которой аппроксимирующий блок использует коэффициенты одного или более полиномов для аппроксимирования поправки.
45. Серверная система по п.42, где серверная система связана с запоминающим устройством для данных, чтобы сохранять аппроксимированную поправку для использования мобильной станцией.
46. Серверная система по п.42, дополнительно содержащая:
передающий блок для передачи аппроксимированной поправки на мобильную станцию по сети.
47. Серверная система по п.42, дополнительно содержащая:
интерфейс передатчика для широковещательной передачи аппроксимированной поправки на одно или более принимающих устройств, включая мобильную станцию.
48. Серверная система по п.41, в которой система координат содержит радиальную ось, параллельную линии или совпадающей с линией, которая соединяет начальную точку с оцененным положением спутника.
49. Серверная система по п.41, в которой корректирующий блок содержит логический узел для вычисления поправки часов для спутника.
50. Серверная система по п.49, в которой поправка часов является аппроксимированной одним или более коэффициентами ряда из одной или более математических функций.
51. Серверная система по п.41, дополнительно содержащая:
интерфейс приемника для приема опорного времени от сервера времени; и
интерфейс передатчика для передачи опорного времени вместе с оценкой положений спутника на мобильную станцию.
52. Машиночитаемый носитель, имеющий сохраненные на нем команды, исполняемые процессором на сервере для:
вычисления поправки между первыми орбитальными данными спутника и вторыми орбитальными данными спутника, причем вторые орбитальные данные являются более точными, чем первые орбитальные данные; и
преобразования пространственных составляющих поправки из первой системы координат во вторую систему координат так, что поправка во второй системе координат имеет по существу плавное изменение с течением времени, и
управления интерфейсом передатчика сервера для передачи поправки, закодированной во второй системе координат из сервера на мобильную станцию для обеспечения возможности мобильной станции оценивать более точные орбитальные данные для спутника посредством применения поправки к первыми орбитальным данным спутника, сохраненным на мобильной станции, причем поправка во второй системе координат представлена одним или более полиномов.
53. Машиночитаемый носитель по п.52, дополнительно содержащий команды, исполняемые процессором для интерполирования поправки во второй системе координат с использованием одного или более полиномов с усеченными членами для уменьшения числа битов, необходимых для передачи на мобильную станцию.
54. Машиночитаемый носитель по п.52, в котором вторая система координат содержит радиальную ось, параллельную линии или совпадающей с линией, которая соединяет начальную точку с оцененным положением спутника, и ось поперечного трека, перпендикулярную к радиальной оси и направлению движения спутника.
55. Машиночитаемый носитель по п.52, дополнительно содержащий команды, исполняемые процессором для аппроксимирования поправки большим количеством коэффициентов в по меньшей мере одном пространственном измерении, чем по другим пространственным измерениям.
56. Машиночитаемый носитель по п.55, дополнительно содержащий команды, выполняемые процессором для:
аппроксимирования поправки с большим количеством коэффициентов в по меньшей мере одном пространственном измерении, чем в другом пространственном изменении, по меньшей мере частично посредством представления поправки с использованием коэффициентов одного или более полиномов в качестве аппроксимированной поправки.
57. Машиночитаемый носитель по п.56, в котором полиномы представляют собой один или более полиномов Эрмита или полиномов Лежандра.
58. Машиночитаемый носитель по п.52, дополнительно содержащий команды, исполняемые процессором для вычисления поправки часов для спутника.
59. Машиночитаемый носитель по п.52, дополнительно содержащий команды, исполняемые процессором для управления интерфейсом приемника для получения опорного времени от сервера времени; и управления интерфейсом передатчика для передачи опорного времени совместно с грубой оценкой положений спутника на мобильную станцию.
60. Мобильная станция для определения орбитальной информации спутника, содержащая:
интерфейс приемника для приема входных данных от сервера местоположения;
оценивающий блок для вычисления поправочных данных для первых орбитальных данных спутника, на основании входных данных от сервера местоположения, причем поправочные данные представлены одним или более полиномов;
преобразующий блок для преобразования поправочных данных, представленных одним или более полиномов из первой системы координат во вторую систему координат, при этом первая система координат выбрана для плавного изменения поправочных данных с течением времени; и
восстанавливающий блок для применения поправочных данных к первым орбитальным данным для оценки более точной орбитальной информации спутника.
61. Мобильная станция по п.60, в которой оси первой системы координат включают в себя радиальную ось, при этом радиальная ось является параллельной или совпадающей с линией, которая соединяет начальную точку с оцененным положением спутника.
62. Мобильная станция по п.60, в которой восстанавливающий блок формирует по существу скорректированные орбитальные данные для оценки положения и метки времени спутника.
63. Мобильная станция по п.60, в которой входные данные из сервера местоположения содержат один или более коэффициентов одного или более полиномов для, по меньшей мере, одной оси системы координат.
64. Мобильная станция по п.60, в которой полиномы представляют собой один или более полиномов Эрмита или полиномов Лежандра.
65. Мобильная станция по п.63, в которой оценивающий блок содержит логический узел для оценивания одного или более полиномов с использованием одного или более коэффициентов и времени применимости для получения поправочных данных.
66. Мобильная станция по п.60, в которой интерфейс приемника принимает входные данные из сервера местоположения посредством передачи файла из запоминающего устройства для данных.
67. Мобильная станция по п.60, в которой интерфейс приемника принимает входные данные посредством приема сообщения, передаваемого из сервера.
68. Мобильная станция по п.60, в которой поправочные данные представлены в первой системе координат с более высокой точностью по одному пространственному измерению, чем по другим пространственным измерениям.
69. Машиночитаемый носитель, имеющий сохраненные на нем команды, исполняемые процессором на мобильной станции для:
преобразования орбитальных поправочных данных спутника представленных одним или более полиномов из первой системы координат во вторую систему координат, при этом первая система координат выбрана для плавного изменения поправочных данных с течением времени; и
применения поправочных данных к первым орбитальным данным спутника для оценки более точной орбитальной информации спутника.
70. Машиночитаемый носитель по п.69, дополнительно содержащий команды, исполняемые процессором для определения положения и метки времени спутника на основании поправочных данных.
71. Машиночитаемый носитель по п.69, в котором первая система координат включает в себя радиальную ось, параллельную линии или совпадающую с линией, которая соединяет начальную точку с оцененным положением спутника, и ось поперечного трека, перпендикулярную к радиальной оси и направлению движения спутника.
72. Машиночитаемый носитель по п.69, в котором поправочные данные представлены в первой системе координат с более высокой точностью по одному пространственному измерению, чем по другим пространственным измерениям.
73. Машиночитаемый носитель по п.69, дополнительно содержащий команды, исполняемые процессором для приема одного или более коэффициентов полиномов для по меньшей мере одной оси системы координат; и оценивания одного или более полиномов с использованием одного или более коэффициентов и времени применимости.
74. Машиночитаемый носитель по п.73, в котором полиномы представляют собой один или более полиномов Эрмита или полиномов Лежандра.
| YANMING FENG ET AL: "Representing GPS Orbits and Corrections Efficiently for Precise Wide Area Positioning" ION GNSS | |||
| INTERNATIONAL TECHNICAL MEETING OF THE SATELLITEDIVISION OF THE INSTITUTE OF NAVIGATION, WASHINGTON, DC, US, 21 September 2004, pages 2316-2323 | |||
| US 5828336 A, 27.10.1998 | |||
| ПРИЕМНИК ГЛОБАЛЬНОЙ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ С ОГРАНИЧЕННЫМ ПРОСТРАНСТВОМ ПОИСКА КОДОВОГО СДВИГА ДЛЯ СОТОВОЙ ТЕЛЕФОННОЙ СИСТЕМЫ | 1998 |
|
RU2197780C2 |
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| US | |||

