Изобретение относится к области медицины, в частности травматологии и ортопедии, и может быть использовано в аппаратах внешней фиксации для осуществления поперечной репозиции, ротации фрагментов кости и удлинения конечности.
Известно компрессионно-дистракционное устройство, содержащее опоры в виде соосно установленных наружного и внутреннего колец, причем наружное кольцо снабжено передаточным элементом, выполненным в виде шестерни съемной рукоятки, а внутреннее кольцо снабжено исполнительным звеном, выполненным в виде зубчатого венца, связанным с передаточным элементом (А.с. СССР № 1132934, Опубл. 07.01.1985, Бюл. № 1).
Однако известное устройство характеризуется высокой сложностью монтажа, предназначено для ручного управления и не обеспечивает возможности осуществления автоматизированных мелкодробных режимов дистракции, ротации и поперечного перемещения.
Известен аппарат для репозиции и фиксации костных отломков, содержащий опоры, выполненные в виде скоб, механизм передачи движения, выполненный в виде поршневого репонирующего устройства, состоящего из пар цилиндров, поршней и винтов, расположенных перпендикулярно друг другу (А.с. СССР № 517196, Опубл. 25.09.1977, Бюл. № 35).
Однако известный аппарат не обеспечивает возможность осуществления автоматизированного управления относительным положением отломков, характеризуется высокой сложностью дозирования величин обеспечиваемых воздействий.
Известен чрескостный аппарат, содержащий опоры со спицами, соединенные между собой автоматическими дистракционными узлами, каждый из которых включает в себя мотор-редуктор, связанный с блоком управления, и ходовой винт с гайкой (А.с. РФ № 30073, Опубл. 20.06.2003, Бюл. 17).
Однако известный аппарат предназначен для осуществления дистракционных перемещений и не способен обеспечить создание ротационных и поперечных перемещений управляемых отломков, а конструкция его дистракционных узлов не отвечает возможности ручного управления.
Задачей настоящего изобретения является обеспечение возможности одновременного, либо раздельного осуществления пространственных перемещений костных фрагментов как в ручном, так и в автоматическом режимах управления аппаратом.
Поставленная задача достигается тем, что система управления чрескостным аппаратом содержит, по меньшей мере, один механизм передачи движения с элементами крепления к чрескостному аппарату, выполненный в виде размещенной в корпусе, как минимум, одной червячной пары и снабженный, как минимум, одним электроприводом, электрически связанным с блоком управления и включающим мотор-редуктор и оптопару с перфорированным диском, установленным на валу мотор-редуктора, причем на валу червяка выполнена шестигранная головка размером "под ключ" для соединения с внутренним шестигранником, образованным на ступице перфорированного диска, а червячное колесо оснащено передаточным элементом, связанным с исполнительным звеном, кроме того, каждый электропривод оснащен монтажным пазом с фиксатором.
Причем для обеспечения возможности осуществления ротационного перемещения передаточный элемент, по крайней мере, одного из механизмов передачи движения выполнен в виде цилиндрической шестерни, а исполнительное звено - в виде сегмента кольца с наружным зубчатым венцом и образуют узел ротационного перемещения.
В целях осуществления поступательного перемещения передаточный элемент, по крайней мере, одного из механизмов передачи движения выполнен в виде осевого резьбового отверстия, а исполнительное звено - в виде резьбового стержня.
Кроме того, для придания универсальности элементам крепления к чрескостному аппарату корпус, по крайней мере, одного из механизмов передачи движения оснащен полым цилиндрическим фланцем, выполненным соосно с исполнительным звеном, образуя дистракционный узел.
Для обеспечения поперечных перемещений корпус, по крайней мере, одного из механизмов передачи движения оснащен направляющим пазом и содержит две червячные пары, оси вращения колес которых расположены перекрестно, под углом 90° друг к другу, причем один из элементов крепления к чрескостному аппарату выполнен в виде скобы, соединенной с крепежной планкой с возможностью относительного перемещения, при этом скоба соединена с концами одного из исполнительных звеньев и взаимодействует с направляющим пазом, выполненным на корпусе, а другой элемент крепления выполнен в виде кронштейнов, установленных на концах другого исполнительного звена, что в совокупности образует узел поперечного перемещения.
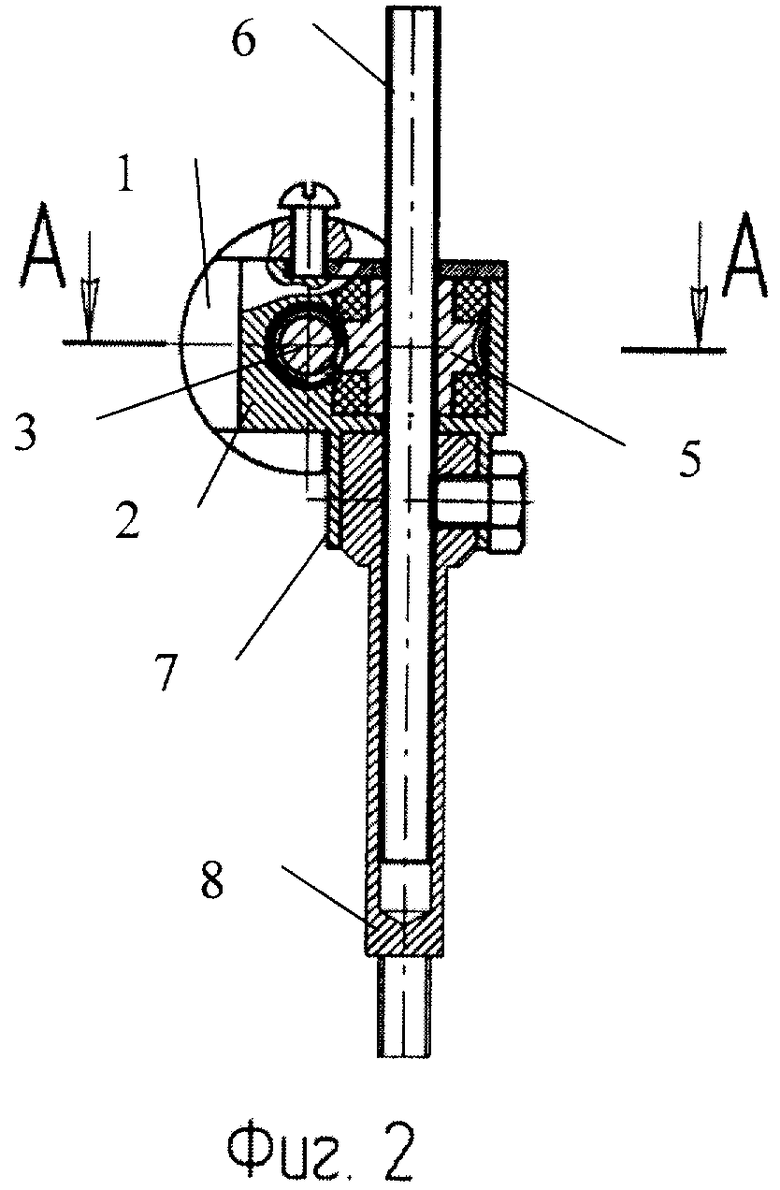
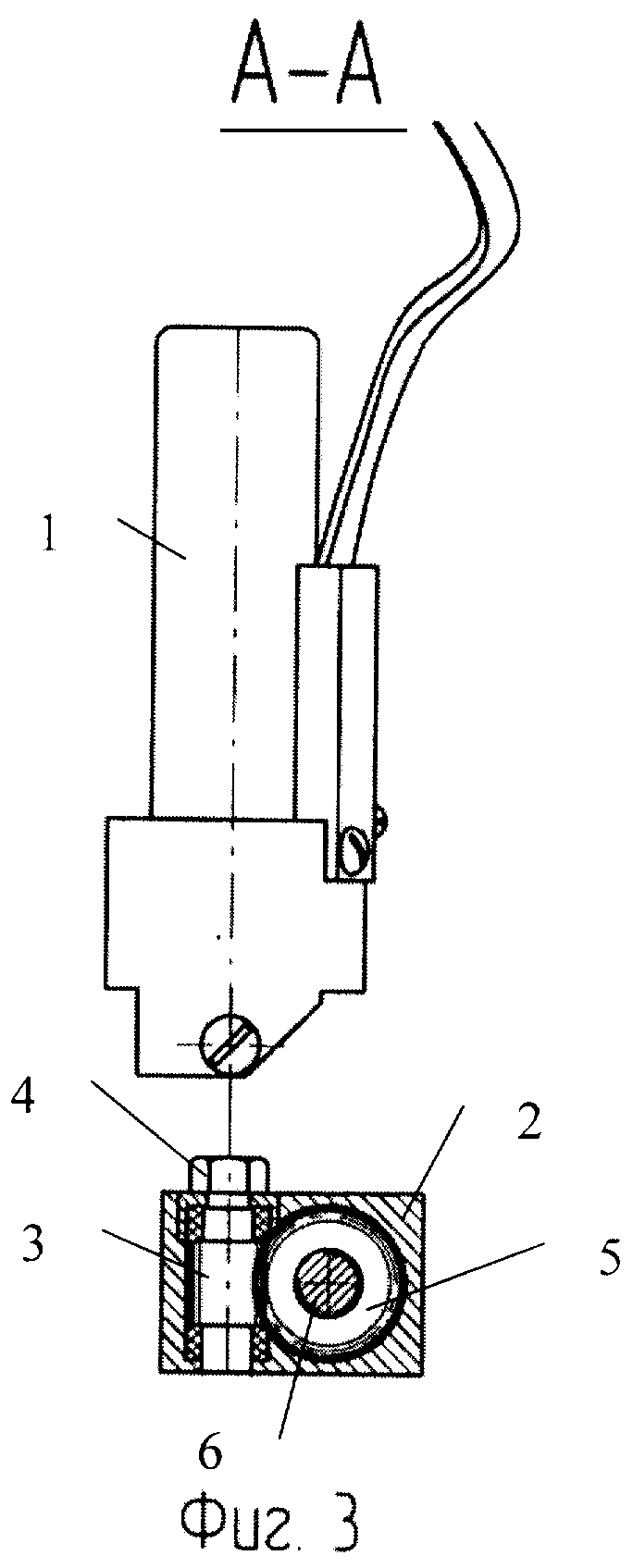
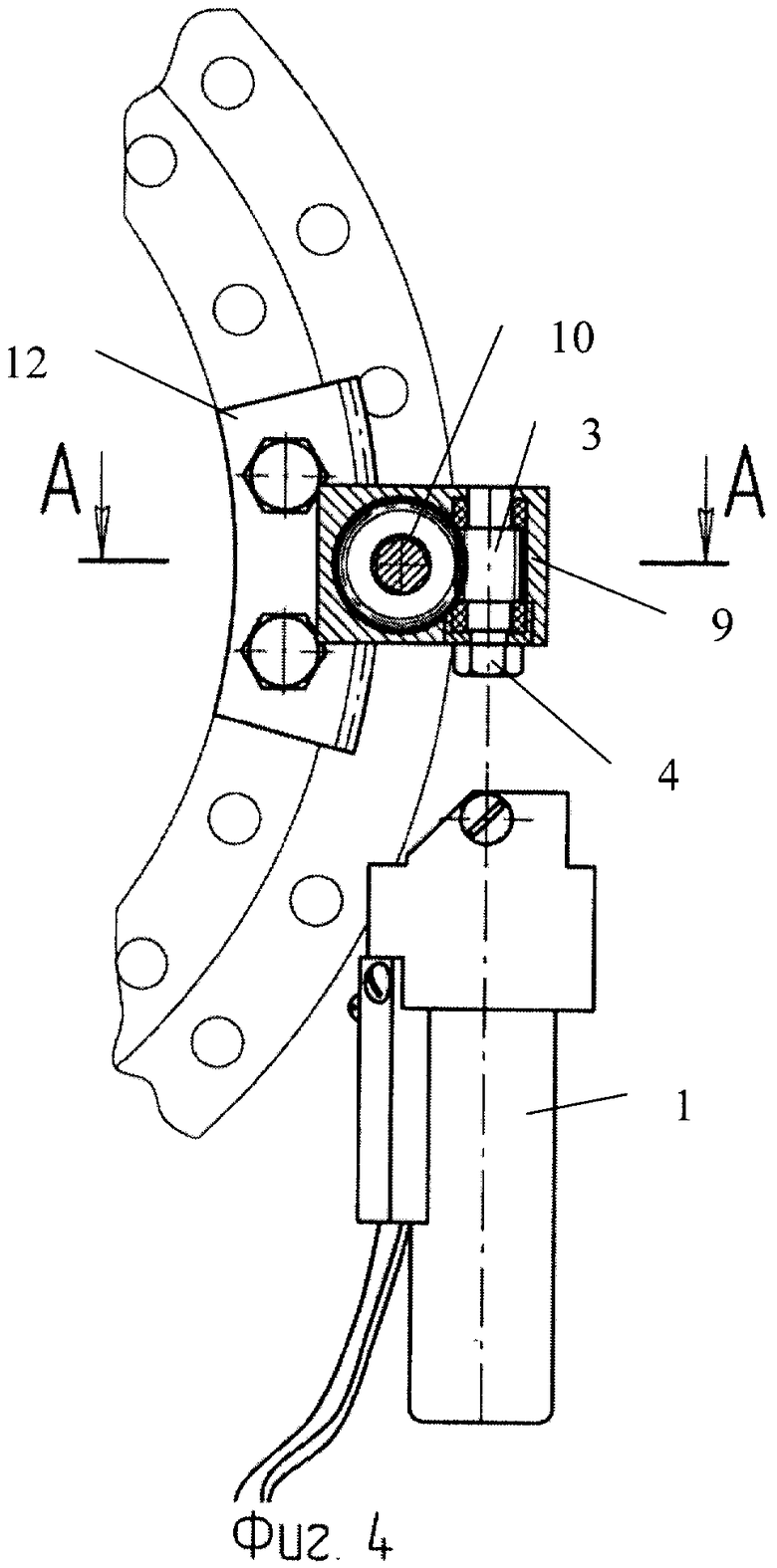
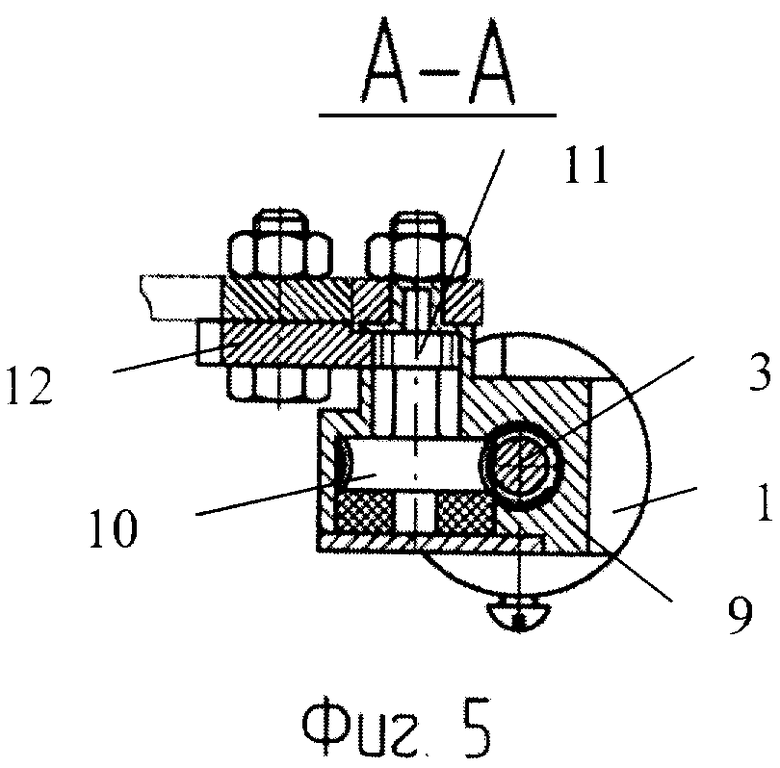
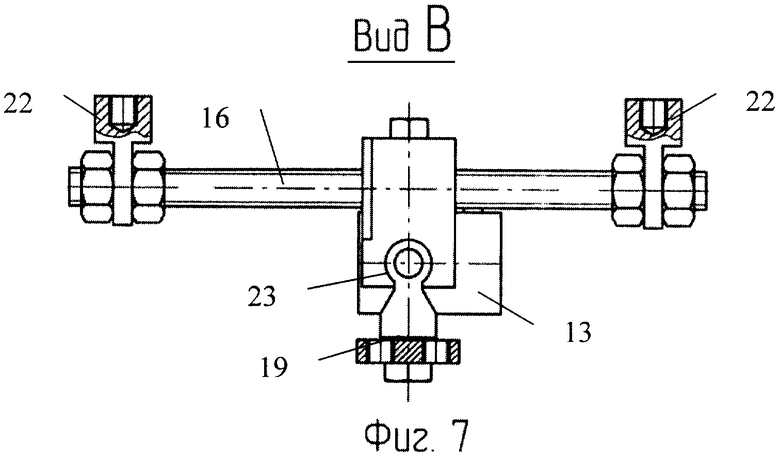
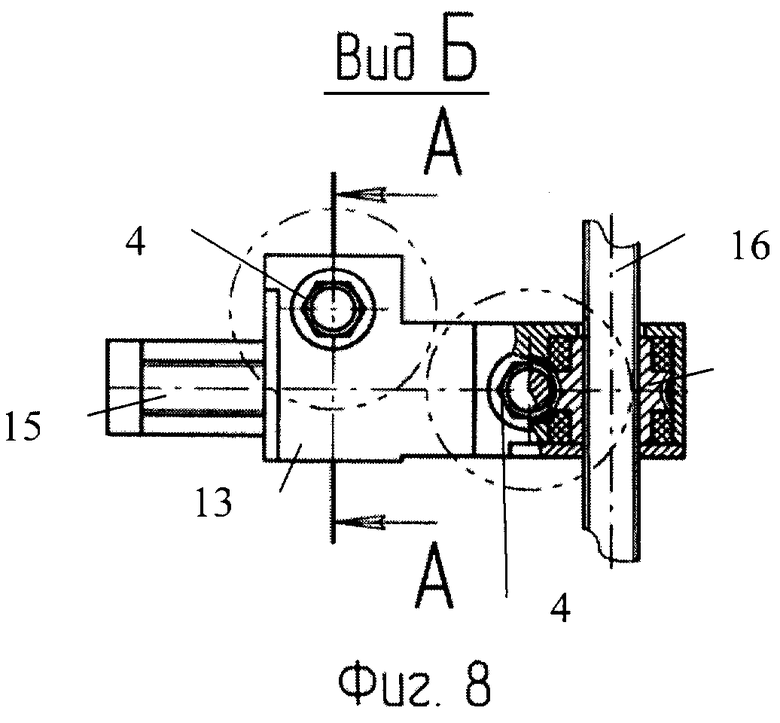
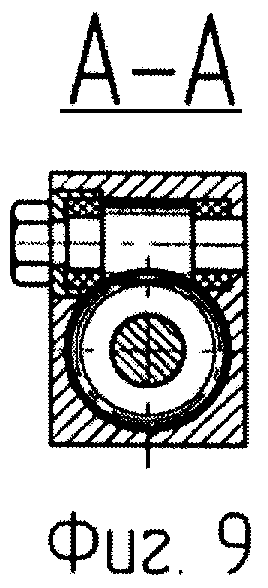
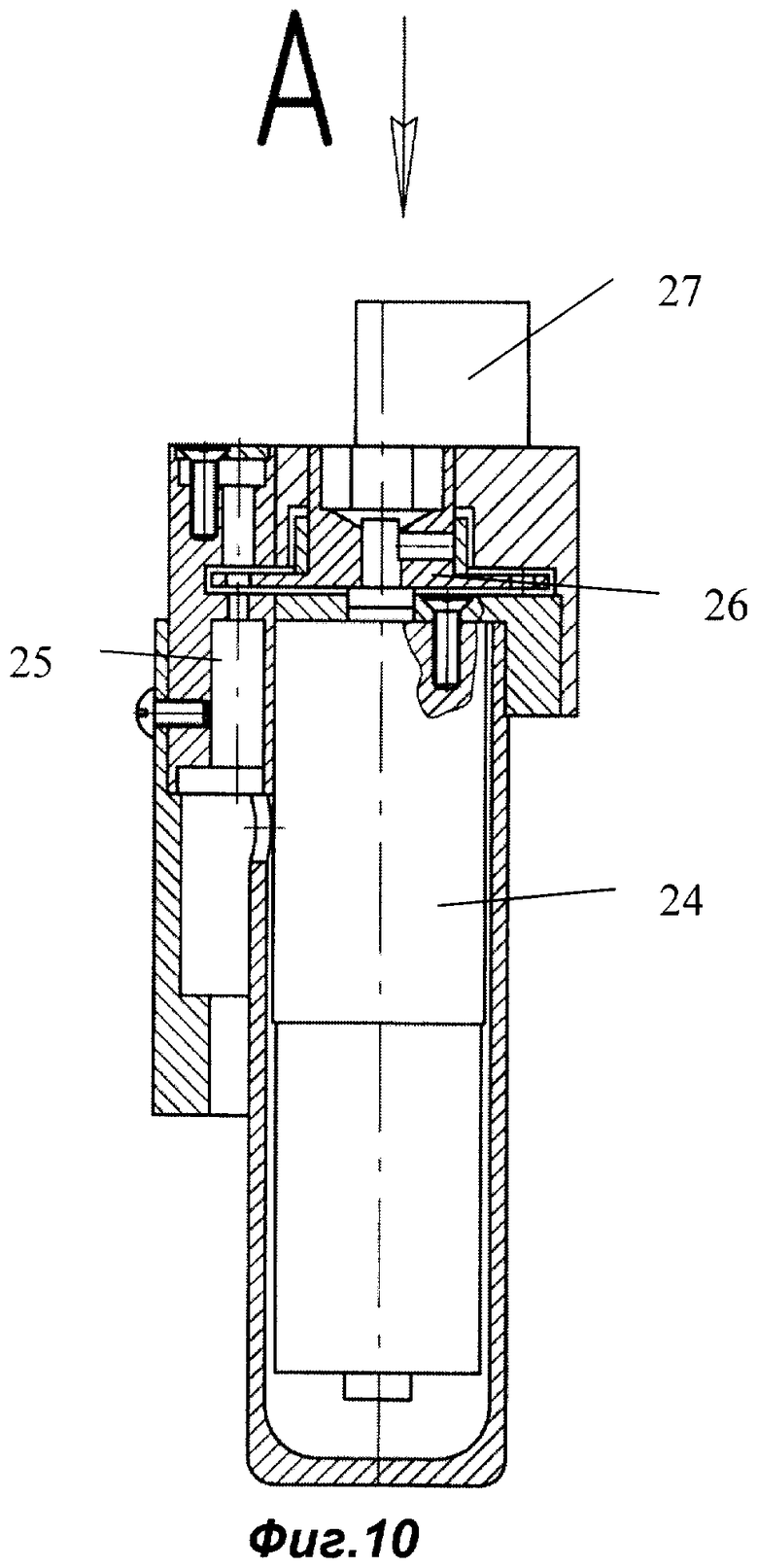
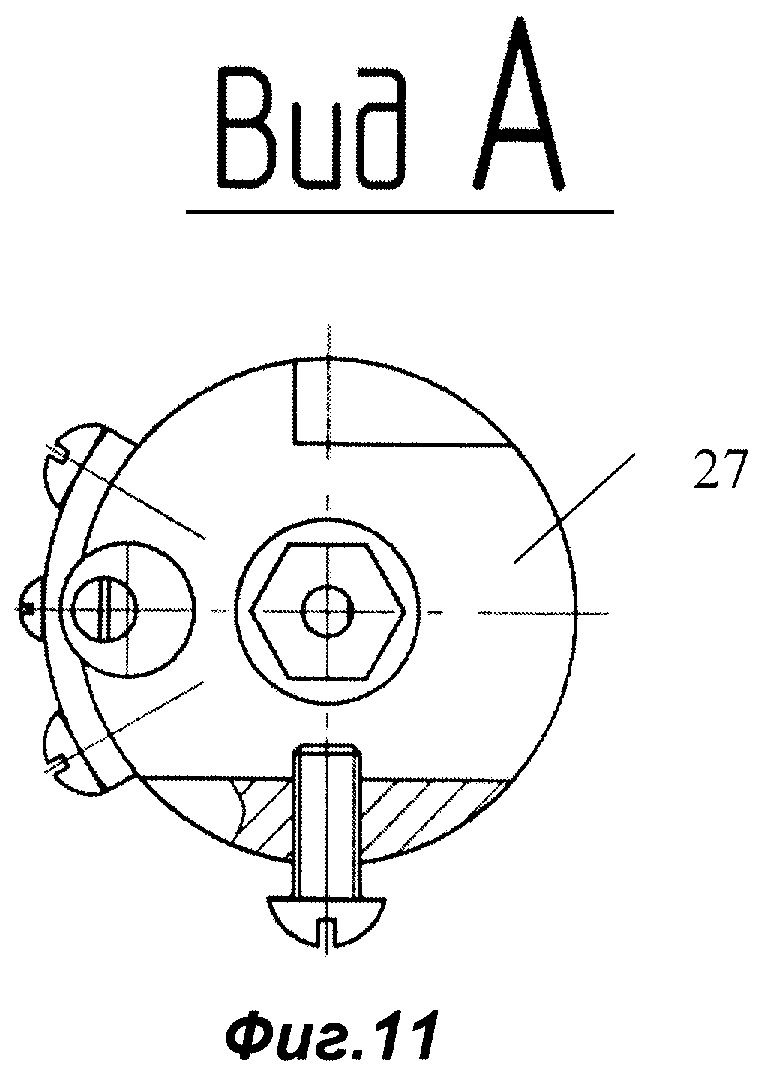
Изобретение иллюстрируется чертежами, представленными на фиг.1 - схема системы управления чрескостным аппаратом; фиг.2 - общий вид с разрезом дистракционного узла, фиг.3 - разрез по А-А дистракционного узла на фиг.2, электропривод отсоединен; фиг.4 - общий вид с разрезом ротационного узла, электропривод отсоединен, фиг.5 - разрез по А-А ротационного узла на фиг.4; фиг.6 - общий вид с разрезом узла поперечного перемещения, электроприводы отсоединены, фиг.7 - вид В узла поперечного перемещения на фиг.6, фиг.8 - вид Б узла поперечного перемещения на фиг.6, фиг.9 - разрез по А-А узла поперечного перемещения на фиг.8; фиг.10 - общий вид с разрезом электропривода, фиг.11 - разрез по А-А электропривода на фиг.10.
Система управления чрескостным аппаратом (фиг.1) содержит дистракционные узлы, ротационные узлы и узлы поперечного перемещения, связанные с блоком управления. Причем наличие и количество отдельных видов узлов и собственно блока управления обусловлено лечебной задачей, а так же назначением и конкретной компоновкой используемого чрескостного аппарата.
Дистракционный узел (фиг.2, фиг.3) состоит из электропривода 1, корпуса 2 с размещенной в нем кинематической цепью, включающей червяк 3, оснащенный шестигранной головкой 4, предназначенной для передачи крутящего момента от привода 1, червячное колесо 5, оснащенное осевым резьбовым отверстием, и соединенный с ним резьбовой стержень 6. Причем корпус узла снабжен полым цилиндрическим фланцем 7, предназначенным для крепления к гильзе чрескостного аппарата 8.
Ротационный узел (фиг.4, фиг.5) состоит из электропривода 1, корпуса 9 с размещенной в нем кинематической цепью, включающей червяк 3, оснащенный шестигранной головкой 4, предназначенной для передачи крутящего момента от привода 1, червячное колесо 10, оснащенное цилиндрической шестерней 11, входящей в зацепление с наружным зубчатым венцом сегмента кольца 12.
Узел поперечного перемещения (фиг.6, фиг.7, фиг.8, фиг.9) состоит из пары электроприводов 1, корпуса 13 с размещенными в нем двумя кинематическими цепями, каждая из которых включает червяк 3, оснащенный шестигранной головкой 4, предназначенной для передачи крутящего момента от привода 1, червячное колесо 14, оснащенное осевым резьбовым отверстием, и соединенный с ним резьбовой стержень 15, 16. Оси резьбовых отверстий червячных колес 14 расположены в корпусе 13 узла перекрестно, под углом 90°. Концы резьбового стержня 15 соединены со скобой 17, на которой установлена крепежная планка 18 посредством рефления 19, паза 20 и резьбового соединения 21. На концах резьбового стержня 16 установлены крепежные кронштейны 22. Корпус 13 содержит фигурный паз 23, связанный со скобой 17 с возможностью относительного перемещения.
При этом электропривод (фиг.10, фиг.11) каждого из узлов состоит из мотор-редуктора 24 и оптопары 25 с перфорированным диском 26, установленным на валу мотор-редуктора 24. Корпус электропривода содержит монтажный паз 27.
Изобретение используется следующим образом.
На этапе планирования оперативного вмешательства на основании сформулированной лечебной задачи с учетом конкретного вида и компоновки чрескостного аппарата определяют вид и количество используемых узлов системы управления чрескостным аппаратом, а так же схему их монтажа.
После наложения опорных элементов используемого чрескостного аппарата производят монтаж выбранных узлов системы.
В случае ручного управления системой в соответствии с требуемыми темпами управления каждого из используемых узлов производится их регулирование посредством вращения шестигранников 4 соответствующих узлов системы. При этом регулирование дистракционного узла приводит к поступательному перемещению резьбового стержня 6, соединенного посредством передачи винт-гайка с колесом червячной пары 5; регулирование ротационного узла приводит к повороту сегмента кольца 12, соединенного посредством наружного зубчатого венца с шестерней 11, выполненной на колесе 10 червячной пары; регулирование узла поперечного перемещения приводит к одновременному или независимому поступательному перемещению каждого из резьбовых стержней 15, 16, соединенных посредством передач винт-гайка с колесами червячных пар 14.
В случае автоматизированного управления системой электропривод 1 каждого из используемых узлов подключают к блоку управления. С помощью последнего задают периодичность включения мотор-редуктора.
Поступающий электрический сигнал от блока управления включает мотор-редуктор 24, передающий вращение на червяк 3 кинематической цепи соответствующего узла. Посредством вращения червячного колеса (5, 10, 14) в случае использования дистракционного узла происходит поступательное перемещение резьбового стержня 6; в случае использования ротационного узла происходит поворот сегмента кольца 12; в случае использования узла поперечного перемещения происходит одновременное или независимое поступательное перемещение каждого из резьбовых стержней 15, 16. В момент прохождения светового луча оптопары 25 через отверстие вращающегося перфорированного диска 26 подается электрический сигнал блоку управления на отключение мотор-редуктора 24.
Последующее включение мотор-редуктора 24 осуществляется через заданный промежуток времени в зависимости от выбранного темпа дистракции.
Использование изобретения расширяет функциональные возможности чрескостных аппаратов, повышает точность управления положением костных фрагментов, упрощает проведение требуемых при этом манипуляций и позволяет осуществлять их одновременно в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ УЗЕЛ К КОМПРЕССИОННО-ДИСТРАКЦИОННОМУ АППАРАТУ | 2006 |
|
RU2309694C2 |
| ЧРЕСКОСТНЫЙ АВТОМАТИЗИРОВАННЫЙ ДИСТРАКЦИОННЫЙ АППАРАТ И АВТОМАТИЧЕСКИЙ УЗЕЛ ПЕРЕМЕЩЕНИЯ | 2021 |
|
RU2763644C1 |
| УСТРОЙСТВО ДЛЯ ОСТЕОТОМИИ | 2007 |
|
RU2356504C1 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| Устройство для чрескостного остеосинтеза | 1988 |
|
SU1650121A1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| АППАРАТ КАВЧУКА ДЛЯ ВНЕШНЕЙ РЕПОЗИЦИИ И ФИКСАЦИИ КОСТНЫХ ОТЛОМКОВ И СПОСОБ АППАРАТНОЙ АВТОМАТИЧЕСКОЙ И ПОЛУАВТОМАТИЧЕСКОЙ РЕПОЗИЦИИ КОСТНЫХ ОТЛОМКОВ | 2001 |
|
RU2273463C2 |
| ПРИВОД ДВИГАТЕЛЬНЫЙ МАЛОГАБАРИТНЫЙ | 2017 |
|
RU2675288C1 |
| РОТАЦИОННЫЙ УЗЕЛ К КОМПРЕССИОННО-ДИСТРАКЦИОННОМУ АППАРАТУ | 2006 |
|
RU2320289C1 |
| ЭЛЕКТРОПРИВОД С РЕДУКТОРОМ ПОВЫШЕННОЙ ЭФФЕКТИВНОСТИ (ВАРИАНТЫ) | 2005 |
|
RU2312260C2 |

Изобретение относится к области медицины, в частности травматологии и ортопедии, и может быть использовано в аппаратах внешней фиксации. Изобретение обеспечивает возможность одновременного, либо раздельного осуществления пространственных перемещений костных фрагментов как в ручном, так и в автоматическом режимах управления аппаратом. Система управления содержит, по меньшей мере, один механизм передачи движения с элементами крепления к чрескостному аппарату, снабженный, как минимум, одним электроприводом, электрически связанным с блоком управления и включающим мотор-редуктор и оптопару с перфорированным диском, установленным на валу мотор-редуктора. Механизм передачи движения выполнен в виде размещенной в корпусе, как минимум, одной червячной пары. На валу червяка выполнена шестигранная головка размером "под ключ" для соединения с внутренним шестигранником, образованным на ступице перфорированного диска. Червячное колесо оснащено передаточным элементом, связанным с исполнительным звеном. Каждый электропривод оснащен монтажным пазом с фиксатором. 4 з.п. ф-лы, 11 ил.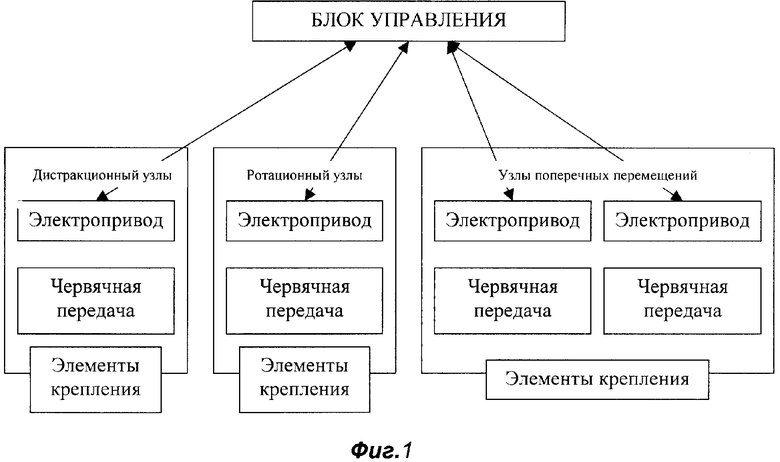
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| US 5827283 A, 27.10.1998 | |||
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1993 |
|
RU2064783C1 |
| RU 2053724 C1, 10.02.1996 | |||
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ ПЛАТОВА | 1991 |
|
RU2061429C1 |
| US 5601551 A, 11.02.1997 | |||
| ГОЛЯХОВСКИЙ В | |||
| и др | |||
| Руководство по чрескостному остеосинтезу методом Илизарова.- М.: БИНОМ и др., 1999. | |||

