Область техники.
Изобретение относится к области медицинской техники, в частности к аппаратам внешней скелетной фиксации (далее также «аппарат») с электромеханическими приводами, к устройствам применяемым в травматологии и ортопедии для автоматического дозированного перемещения костных фрагментов.
Уровень техники.
Проблемы реабилитации больных с врожденной патологией костно-мышечной системой, инвалидов с последствиями травм верхних и нижних конечностей продолжают волновать ортопедов во всех странах мира. Среди пациентов, обращающихся в ортопедические центры, в 80 % случаев требуется решать вопросы удлинения конечности или исправления деформаций с одновременной дистракцией костных фрагментов.
Среди многочисленных способов удлинения конечности на сегодняшний день методом выбора остается чрескостный дистракционнный остеосинтез по методу Илизарова. Основные принципы, на которых основывается метод Илизарова, включают стабильную фиксацию костных фрагментов, сберегательное отношение к остеогенным тканям, хорошее их кровоснабжение, оптимальный темп и ритм дистракции, возможность функциональной нагрузки на конечность в процессе удлинения [Шевцов В.И., Попков А.В., 1998].
Совершенствуя процесс удлинения конечности, ортопеды в разных странах подошли к необходимости автоматизировать этот процесс [Илизаров Г.А., 1981; Попков А.В., 2008; Г.А. Урьев, О.А. Соколовский, И.А. Ильясевич, А.В. Заровская, 2008].
К настоящему времени известны аппараты обеспечивающие удлинение конечностей в автоматическом режиме работы (см. патенты: US 4615338; US 4973331; RU 1122308; RU 423114; RU 30073). В которых применены различные конструкции автоматических узлов перемещения (автоматических дистракционных узлов), обеспечивающих дозированное взаимное перемещение опор аппарата вместе с зафиксированными в них костными отломками. Однако все они обладают недостатками, такими как относительно высокая масса и габариты, связанные с исполнением блока управления, а также отсутствие обратной связи. Так как аппарат является частью биотехнической системы аппарат-организм. Между воздействием аппарата на организм и результатом этого воздействия должна быть налажена обратная связь, выполняющая контролирующую функцию для обеспечения качества управления процессами перемещения и регенерации. Управляющая подсистема (организм) должна корректировать режимы управляемой подсистемы (аппарат) через эфферентные связи. Поэтому в аппаратах в будущем появится третья подсистема - эффекторная. Биотехническая система аппарат-организм станет более саморегулирующейся, т. е. приобретет адаптивность.
В качестве элементов обратной связи могут быть использованы прежде всего силоизмерительные датчики, контролирующие силу дистракции и компрессии [Попков А.В., 1977; Meyrueis J.P. et al., 1980; Domres B, Neugebauer W., 1980; патент RU 3085; патент RU 4675]. Однако использование механических силоизмерительных датчиков значительно увеличивает габариты аппарата внешней фиксации, а точность измерения оставляет желать лучшего. Тензорезисторные датчики, использованные в аппаратах внешней фиксации, отличаясь высокой чувствительностью дают огромную ошибку измерения при малейшей ассиметрии установки измерительного элемента (патент RU №227739 - Группа изобретений обеспечивает организацию цифровой визуализации процессов компрессии и дистракции в чрескостных аппаратах, повышение точности репозиции костных фрагментов, точности задания компрессионной нагрузки и зазора между фрагментами).
В Центре Илизарова экспериментальное обоснование использования и внедрение автоматического варианта удлинения костей конечностей началось с 1981 года. Не смотря на то, что клиническая эффективность используемых автоматических приводов была доказана, были выявлены и некоторые неудобства их применения. Изделия отличались большими габаритами и значительным весом. Количество подключаемых мотор-редукторов составляло не более четырех, что ограничивало использование автодистрактора при некоторых видах наружных фиксирующих конструкций (Тейлора, ORTO-SUV). Не было функции обратной связи в зависимости от динамики дистракционных усилий аппарата внешней фиксации. Все это привело к необходимости разработки автоматических дистракторов нового поколения.
Из существующего уровня техники известен компрессионно-дистракционный аппарат Платова (Патент RU 2061421, опубл.: 10.06.96., бюл. 161), который содержит кольца, со специально выполненными монтажными отверстиями, и спицы. Кольца соединены между собой автоматическими дистракционными узлами (узлами перемещения), каждый из которых включает в себя мотор-редуктор, электрически связанный с блоком управления, ролико-винтовые пары с промежуточными телами качения. При этом ходовой винт соединен соосно с выходным валом мотор-редуктора.
Однако, данный аппарат не обеспечивает равенство перемещений в винтовых парах в каждом цикле работы в связи зависимостью числа оборотов двигателей от величины нагрузки и степени разрядки элементов питания, что приводит к искривлению формируемого костного регенерата. Кроме того, расположение дистракционных узлов (узлов перемещения) в аппарате определено конструкцией опорных колец, что ограничивает возможные направления проведения спиц и места их закрепления. Одновременно, сложность конструкции ролико-винтовых пар, увеличивает стоимость изделия, а расположение мотор-редукторов вне промежутка между опорными кольцами - габариты аппарата. Аппарат не имеет системы обратной связи на основе измерения дистракционных или компрессионных усилий.
Известен компрессионно-дистракционный аппарат (А.с. SU 1423114 СССР МКИ5 А61В 17/58 Опубл. 15.09.88; Бюл. № 34.), содержащий опоры с резьбовым стержнем, соединенным с приводным устройством (автоматический узел перемещения), включающим корпус с патрубком, храповое колесо, установленным на резьбовом стержне, силовой элемент, выполненный из материала, обладающим эффектом памяти, связанный с пружиной, храповиком и имеющим нагреватель, электрически связанный с блоком управления и источником питания.
Однако данный аппарат не развивает необходимые силы дистракции для удлинения сегментов конечностей у взрослых пациентов, имеет низкий к.п.д, а потеря тепла нагревателя требует эксплуатации при достаточно высокой температуре окружающей среды и обуславливает частую замену источника питания. Аппарат не имеет возможности для измерения дистракционных усилий.
Известно устройство для остеосинтеза с автоматической системой управления (патент RU 143975). Содержит соединенные электроприводами, опоры с закрепленными на них спицами, блок управления с источником питания и программируемым контроллером, электрически связанные с электроприводами, датчиками положения, блоком программирования с жидкокристаллическим дисплеем. Причем блок программирования подключается к блоку управления только на время ввода программ. Блок программирования оснащен интерфейсом для подключения к персональному компьютеру, в виде USB разъема, сенсорной панелью, программируемым микроконтроллером, драйвером сенсорной панели, стабилизатором напряжения. Блок управления закреплен на опоре устройства, и содержит часы реального времени, источник питания часов, энергонезависимую память, драйверы электроприводов, снабжен системой аварийного отключения электроприводов, в виде кнопки, световой и звуковой индикацией режима работы, посредством динамика и светодиода, а также разъемом для подключения блока программирования. Использование устройства позволяет производить автоматическое дозированное перемещения костных фрагментов, с заданным темпом дистракции и контролем параметров.
Блок управления закреплен на опоре устройства и компоненты управления и обратной связи расположены вне корпуса электроприводов, что увеличивает габариты и массу блока управления и аппарата.
Известен чрескостный аппарат (патент RU 30073), содержащий опоры со спицами, соединенные между собой автоматическими дистракционными узлами (автоматическими узлами перемещения), каждый из которых включает в себя мотор-редуктор, электрически связанный с блоком управления. Автоматический дистракционный узел выполнен в виде платформы с размещенной на ней зубчатой парой, связывающей между собой ходовой винт и мотор-редуктор, расположенные со стороны зубчатой пары, а гайка ходового винта выполнена из хладотекучего антифрикционного фторсодержащего полимера, при этом на платформе смонтирована оптопара, электрически связанная с блоком управления, снабженная перфорированным диском, закрепленным на одной из шестерён зубчатой пары.
Недостатком данной модели является необходимость отдельно размещенного блока управления большого веса и габаритов, темп дистракции ограничен 2 мм/сутки, незначительная толщина зубчатой пары ведет к частым возникновениям зазоров в винтовых парах и нарушениям в передаче усилий мотора-редуктора. В данном аппарате отсутствует силоизмерительный датчик, что исключает создание системы обратной связи в процессе дистракционного остеосинтеза. Блок управления размещённый вне корпуса автоматического дистракционного узла значительно увеличивает габариты и массу аппарата.
Сущность технического решения.
Задачей изобретения является обеспечение возможности круглосуточного дозированного контролируемого перемещения костных фрагментов для удлинения конечности с обратной связью аппарат-организм.
Технический результат заключается в обеспечении дизированного перемещения опор аппарата внешней фиксации, при снижении массы и габаритов аппарата, с обеспечением обратной связи в виде контроля возникающих усилий в месте крепления ходового винта. Изобретение обеспечивает возможность высокодробного круглосуточного пространственного перемещений костных фрагментов в автоматическом режиме управления с заданным ритмом и скоростью дистракции. Повышена надежность конструкции.
Причем компоненты управления и контроля интегрированы в автоматический узел перемещения.
Изобретение в одном аспекте касается собственно конструкции автоматического узла перемещения.
Технический результат достигается тем, что автоматический узел перемещения для чрескостного автоматизированного дистракционного аппарата, включает в себя корпус, мотор-редуктор и ходовой винт с гайкой, в корпусе размещена зубчатая передача, связывающая между собой ходовой винт и мотор-редуктор, гайка ходового винта выполнена из хладотекучего антифрикционного фторсодержащего полимера и установлена с возможностью торцевого поджатия, в корпусе смонтирован секторный диск, закрепленный на одной из шестерен зубчатой передачи и датчик вращения секторного диска. Внутри корпуса с мотор-редуктором расположен контроллер, электрически связанный с датчиком вращения секторного диска, и в месте крепления ходового винта установлен датчик продольного усилия ходового винта, электрически связанный с контроллером.
Изобретение в другом аспекте касается собственно конструкции чрескостного автоматизированного дистракционного аппарата.
Технический результат достигается тем, что чрескостный автоматизированный дистракционный аппарат, содержит опоры, соединенные между собой автоматическими узлами перемещения, каждый из которых включает в себя мотор-редуктор, электрически связанный с контроллером, и ходовой винт с гайкой, причем автоматический узел перемещения выполнен в виде корпуса с размещенной в нем зубчатой передачей, связывающей между собой ходовой винт и мотор-редуктор, гайка ходового винта выполнена из хладотекучего антифрикционного фторсодержащего полимера и установлена с возможностью торцевого поджатия, в корпусе смонтирован секторный диск, закрепленный на одной из шестерен зубчатой передачи и датчик вращения секторного диска, электрически связанный с контроллером. К секторный онтроллер расположен внутри корпуса автоматического узла перемещения, в месте крепления ходового винта установлен датчик продольного усилия ходового винта, электрически связанный с контроллером.
Причем источник питания расположен в базовом блоке, к которому подключены от 1 до 6 автоматических узлов перемещения.
Изобретение поясняется изображениями:
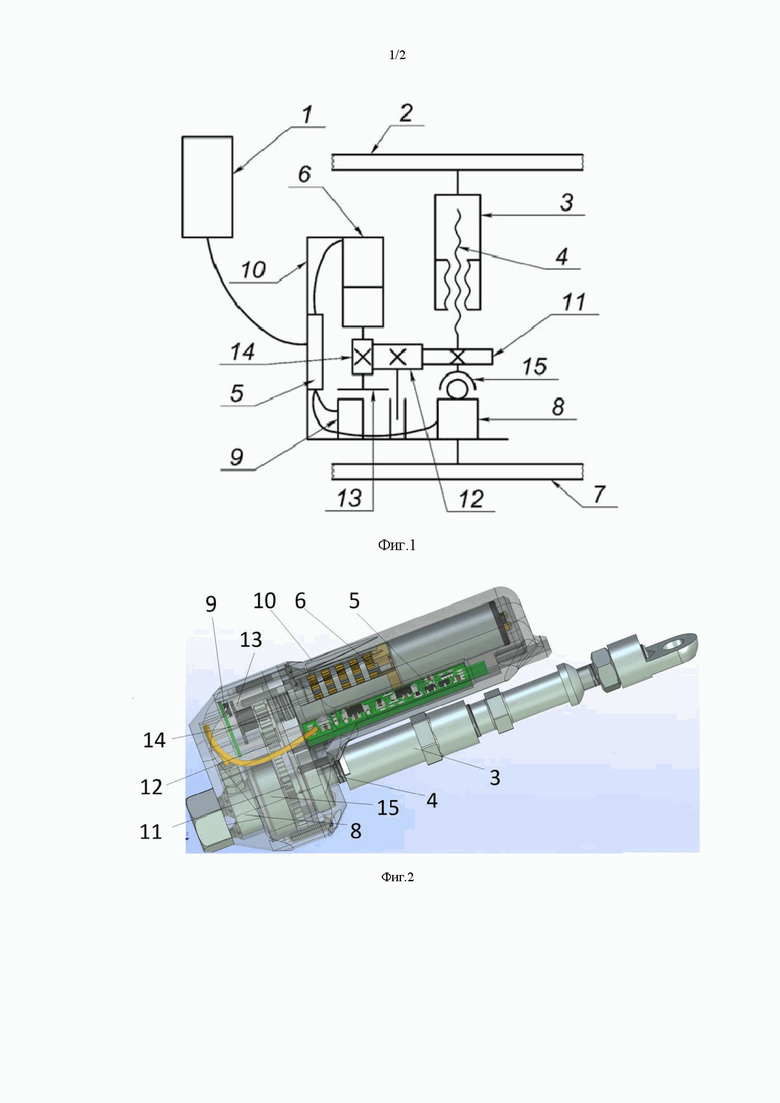
фиг. 1 – схема, чрескостный автоматизированный дистракционный аппарат;
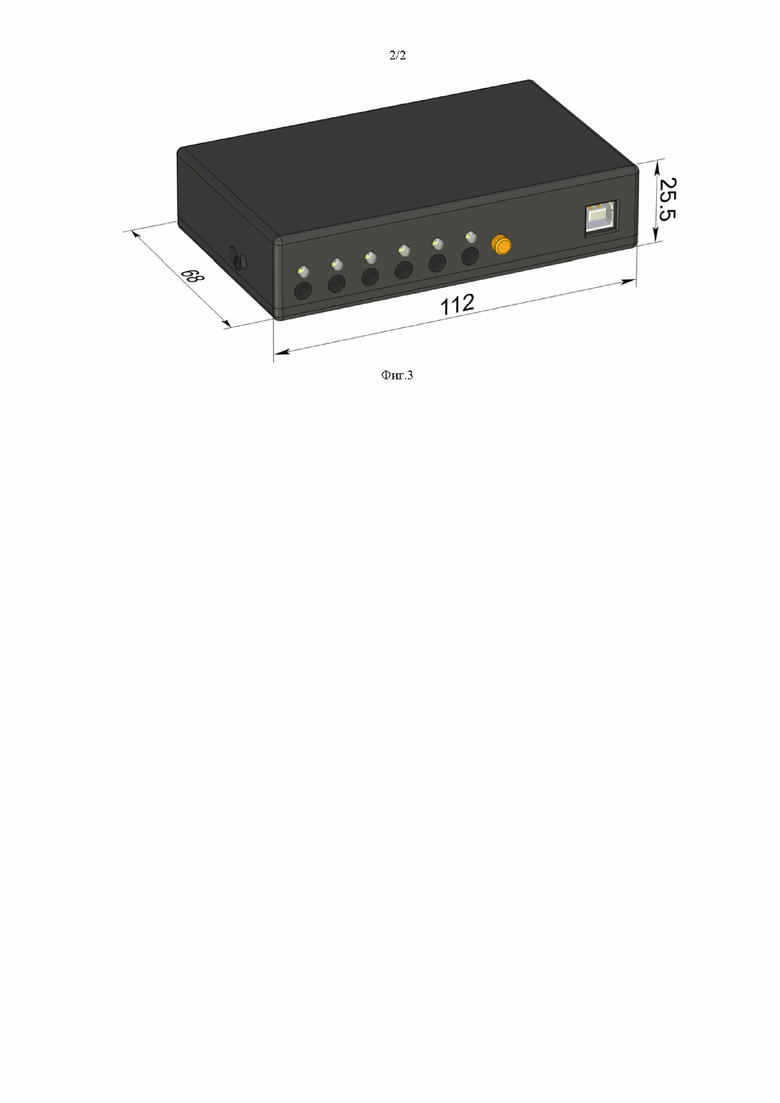
Фиг. 2 – изображение 3d модели, автоматический узел перемещения, корпус показан прозрачным;
Фиг. 3 – изображение базового блока.
Спецификация:
1 - базовый блок;
2 , 7 - опоры;
3 - гайка;
4 - ходовой винт;
5 - контроллер;
6- мотор-редуктор;
8- датчик продольного усилия ходового винта;
9 - датчик вращения секторного диска;
10 - корпус;
11 - ведомое зубчатое колесо;
12- промежуточное зубчатое колесо;
13 - секторный диск;
14- ведущее зубчатое колесо;
15- опорный подшипник.
Осуществление изобретения.
Чрескостный автоматизированный дистракционный аппарат (фиг.1) содержит базовый блок 1 (фиг.3) предназначенный для размещения источника питания и элементов связи с внешними устройствами обработки данных (персональный компьютер, смартфон и т.п.), опоры 2 и 7 со спицами и/или костными шурупами, для крепления к костным фрагментам. Опоры 2 и 7 соединены между собой автоматическими узлами перемещения (фиг.2), каждый из которых включает в себя мотор-редуктор 6, электрически связанный с контроллером 10, и ходовой винт 4 с гайкой 3. Причем автоматический узел перемещения выполнен в виде корпуса 10 с размещенной в нем зубчатой передачей, связывающей между собой ходовой винт 4 и мотор-редуктор 6. Гайка 3 ходового винта выполнена из хладотекучего антифрикционного фторсодержащего полимера и установлена с возможностью торцевого поджатия. Гайка 3 установлена в трубке (не обозначена) с возможностью торцевого поджатия посредством полого толкателя, ввинченного в трубку. В корпусе 10 смонтирован секторный диск 13, закрепленный на одной из шестерен (14) зубчатой передачи и датчик 9 вращения секторального диска, электрически связанный с контроллером 5. Контроллер 5 расположен внутри корпуса 10 автоматического узла перемещения. В месте крепления ходового винта 4 установлен датчик 8 продольного усилия ходового винта электрически связанный с контроллером 5.
Автоматический узел перемещения для чрескостного автоматизированного дистракционного аппарата включает в себя корпус 10, мотор-редуктор 6, и ходовой винт 4 с гайкой 3. В корпусе 10 размещена зубчатая передача, включающая ведомое зубчатое колесо 11, промежуточное зубчатое колесо 12, ведущее зубчатое колесо 14, связывающая между собой ходовой винт 4 и мотор-редуктор 6. Гайка 3 ходового винта 4 выполнена из хладотекучего антифрикционного фторсодержащего полимера и установлена с возможностью торцевого поджатия, с помощью толкателя (не обозначен). В корпусе 10 смонтирован секторный диск 13, закрепленный на одной из шестерен (14) зубчатой передачи и датчик 9 вращения секторального диска 13. Внутри корпуса 10 рядом с мотор-редуктором 6 расположен контроллер 5, электрически связанный с датчиком 9 вращения секторального диска 13. В месте крепления ходового винта 4 установлен опорный подшипник 15 и датчик 8 продольного усилия ходового винта 4 электрически связанный с контроллером 5.
Чрескостный автоматизированный дистракционный аппарат содержит опоры со спицами или костными винтами (стержнями-шурупами). К базовому блоку 1 подключаются автоматические узлы перемещения от 1 до 6 штук в зависимости от поставленных лечебных задач и выбранной конструкции аппарата внешней фиксации.
Мотор-редуктор 6, электрически связан с контроллером 5 и базовым блоком 1 для обеспечения работы в заданном темпе дистракции, контроля-управления перемещением. Базовый блок содержит электронные компоненты с программой ЭВМ в которой заложены параметры удлинения конечности на принципах обратной связи с динамикой дистракционных усилий для чего ходовой винт 4 опирается в корпусе через опорный подшипник 15 на тензорезисторный датчик 8 продольного усилия ходового винта 4, а контроллер 5 компонентов (датчика продольных усилий, датчика вращения секторного диска, мотор-редуктора) расположен внутри корпуса. Электропитание узла перемещения осуществляется от вынесенных в базовый блок 1 батареек типа АА. Базовый блок 1 также обеспечивает отражение величины перемещения костных фрагментов конечности и изменения в программе удлинения конечности через обратную связь с динамикой дистракционных усилий, отражаемой на смартфоне, планшете или ПК.
Корпус 10 автоматического узла перемещения в основании содержит платформу (не обозначена) на которой размещены элементы зубчатой передачи и которой крепится кожух мотор-редуктора 6.
Чрескостный автоматизированный дистракционный аппарат таким образом обладает интеллектуальную обратную связью с системой контроля дистракционных усилий в процессе автоматизированного удлинения конечности.
Размещение процессорной платы управления с контроллером 5 в корпусе 10 автоматического узла перемещения позволяет сделать конструкцию компактной и более надежной в работе.
Система контроля и перемещения сформирована на принципе обратной связи при контроле дистракционных усилий, возникающих в аппарате (в сумме со всех узлов перемещения):
- нормальный процесс удлинения сопровождается плавным ростом дистракционных усилий от 0 до 600H и в этих условиях программа управления не меняет темп и ритм дистракции;
- при пониженном процессе репаративной регенерации костной ткани, когда уровень дистракционных усилий выходит на плато в 200-250Н программа управления снижает темп дистракции до 0,5 мм/сутки не меняя его до конца процесса удлинения;
- при внезапном нарушении непрерывности дистракционного регенерата (повышенный темп дистракции) отмечается резкое снижение уровня дистракционных усилий и в этих условиях программа управления сначала снижает темп дистракции вдвое и при дальнейшем снижении уровня дистракционных усилий еще через сутки прекращает удлинение на 7 дней, сообщая о проблеме лечащему врачу через световую сигнализацию и на электронный носитель. При отсутствии указаний со стороны лечащего врача через 7 дней дистракция автоматически будет продолжена темпом 0,5 мм в сутки с контролем за динамикой дистракционных усилий;
- при повышенном процессе репаративной регенерации костной ткани (опасность преждевременной консолидации костных фрагментов) отмечается резкое повышение уровня дистракционных усилий на 100-150Н за 1-2 дня и в этих условиях блок управления повышает темп дистракции до 2, а через сутки до 3 мм/сутки, включает световое оповещение лечащего врача и продолжает дистракцию в повышенном темпе. После достижения уровня дистракционных усилий в 600-700Н удлинение прекращается
Чрескостный автоматизированный дистракционный аппарат типа аппарата Илизарова (ТМ).
Роботизированный аппарат Илизарова, имеет опоры 2 и 7, соединенные между собой автоматическими узлами перемещения (от 1 до 6 штук а зависимости от поставленной лечебной задачи), каждый из которых содержит закрепленный на одной опоре корпус 10, в котором установлен мотор-редуктор 6, зубчатая передача, передающая усилие вращения редуктора на ходовой винт 4, проходящий через гайку 3 из антифрикционного материала, установленную в трубке и поджатую по торцу полым толкателем, передающим усилие растяжения на другую опору, оптопара, снабженная секторальным диском, и вынесенный базовый блок 1 для управления мотор-редуктором 6, электрически связанный с узлами перемещения посредством кабеля. Для измерения усилия растяжения между опорами 2 и 7 и автоматической коррекции усилия дистракции ходовой винт 4 опирается на тензометрический датчик 8 усилия, установленный в корпусе 10 и электрически соединенный с процессорной платой управления с контроллером 5 для управления мотор-редуктором 6, также размещенной в корпусе 10 и соединенной проводами с выходом оптопары датчика 8 положения вала мотор-редуктора 6, содержащего посаженный на вал перфорированный секторный диск 13 и отражатель (не обозначен), установленный в корпусе 10.
При этом для уменьшения габаритов корпуса 10 зубчатая передача имеет промежуточную шестерню 14, а плата управления с контроллером 5 через соединительный кабель из трех проводов соединена электрически с базовым блоком 1 управления, в который вводится программа лечения, выраженная через динамику дистракционных усилий и отражаемая на смартфоне, планшете или ПК, как и записанные текущие результаты лечения, а обмен информацией между базовым блоком 1 управления и платой с контроллером 5 для управления мотор-редуктором 6 осуществляется по одному проводу соединительного кабеля, в то время как по двум проводам кабеля подается питание от размещенных в блоке управления химических элементов питания, что уменьшает количество проводов до трех на каждый автоматический узел перемещения.
Использование изобретения.
Автоматический узел перемещения устанавливается между опорами 2 и 7 аппарата внешней фиксации в количестве от одного до шести в зависимости от поставленной лечебной задачи и выбранной моделью аппарата внешней фиксации. Таким образом формируется чрескостный автоматизированный дистракционный аппарат, который монтируют на конечность. Крепление корпуса 10 и гайки 3 осуществляют элементами комплектов аппарата (гайки и болты), сохраняя общее продольное направление нагрузки на ходовой винт 4. После подключения автоматического узла перемещения к базовому блоку 1 и выбора программы удлинения конечности запускают процесс дистракции. Поступающий электрический сигнал от блока управления 1 включает мотор-редуктор 6, передающий вращение через ведущее зубчатое колесо 14 и промежуточное зубчатое колесо 12 на ведомое зубчатое колесо 11, закрепленное на ходовом винте 4. Вращение ходового винта в полой гайке 3 приводит к увеличению расстояния между опорами 2 и 7 аппарата, следовательно к перемещению связанных с ними спицами и/ли костными винтами фрагментами кости. В момент прохождения светового луча оптопары включающей секторный диск 13 и датчик 9 через отверстие секторального диска 13 подается электрический сигнал контроллеру 5 на отключение мотор-редуктора 6.
Последующее включение мотор-редуктора 6 осуществляется через заданный промежуток времени в зависимости от выбранного темпа и ритма дистракции.
В предлагаемом аппарате контроль за величиной угла поворота ходового винта 4 посредством оптопары с датчиком 9 вращения секторного диска 13 обеспечивает равенство микроперемещений в каждом цикле работы.
Наличие промежуточного зубчатого колеса 12 устраняет возможные зазоры и заклинивания в процессе вращения.
Контроллер 10 компонентов автоматического узла перемещения, расположенный внутри корпуса 10 обслуживает работу мотор-редуктора 6, датчика вращения секторного диска 9 и датчика 8 продольного усилия ходового винта 4.
Опорный подшипник 15 обеспечивает передачу продольной нагрузки ходового винта 4 на датчик 8 продольного усилия ходового винта 4.
Выполнение гайки 3 из фторопласта упрощает и удешевляет конструкцию чрескостного аппарата, а физико-механические свойства её материала и возможность поджатия исключают риск заклинивания резьбы, обеспечивают низкий коэффициент трения и возможность устранения зазоров в винтовой паре.
Использование пространства занимаемого мотор-редуктором 6 между опорами 2 и 7 для размещения винтовой пары уменьшает габариты аппарата, использование пространства внутри корпуса 10 для размещения электронных компонентов контроллера 5 позволяет уменьшить количество, размер и массу элементов конструкции аппараты выносимых за его пределы, позволяет уменьшить общие габариты и массу аппарата и повысить его надежность, защищенность уязвимых для повреждения частей.
Базовый блок 1 и контроллер 5 предназначены для автоматического управления механизмами по заранее составленной программе.
В зависимости от выбранного темпа дистракции/компрессии для каждого автоматического узла перемещения (далее также «автодистрактор») вычисляется период времени, через который должно осуществляться его включение. Вычисленное значение периода с дополнительной информацией (режим: дистракция/компрессия, часы работы в течении суток) заносится в память базового блока в качестве управляющей программы. Размер управляющей программы составляет 60 дней. Темп дистракции/компрессии (период включения) задаётся на каждый день и на каждый автодистрактор отдельно.
Программа осуществляет периодическое включение автодистракторов с заданным периодом. Для удобства пациента в программу введены часы работы в течение суток. При необходимости можно установить время, когда автодистракторы включаться не будут. Период включения автодистракторов при этом корректируется, чтоб сохранить заданный темп дистракции/компрессии.
Для индикации состояния в базовый блок 1 входят: индикатор режима работы (жёлтый – “ОСТАНОВ”, зелёный – “РАБОТА”, красный мигающий – “СБОЙ”), индикатор разряда батареи и звуковая сигнализация, дублирующая световую индикацию “СБОЙ”.
В качестве органов управления используется кнопка выбора режима “ОСТАНОВ/РАБОТА” и выключатель питания.
Задание программы управления автодистракторами осуществляется через разъём программирования, расположенный в батарейном отсеке.
Во время работы автодистрактора подаётся питание на датчик обратной связи, который контролирует перемещение штока автодистрактора. Если в течении 8с (максимальное время вращения двигателя) на выходе датчика обратной связи не будет обнаружено перепадов уровня напряжения, то электронный блок управления выдаст звуковой и световой сигнал об ошибке.
Если время работы нескольких автодистракторов совпало, то вначале включается один из них, и только после полного останова первого автодистрактора, производится включение следующего.
Группа изобретений относится к медицине, а именно к чрескостному автоматизированному дистракционному аппарату и автоматическому узлу перемещения. Чрескостный автоматизированный дистракционный аппарат содержит опоры, соединенные между собой автоматическими узлами перемещения, каждый из которых включает в себя корпус, мотор-редуктор, электрически связанный с контроллером, и ходовой винт с гайкой. Автоматический узел перемещения выполнен с размещенной в нем зубчатой передачей, связывающей между собой ходовой винт и мотор-редуктор, гайка ходового винта выполнена из хладотекучего антифрикционного фторсодержащего полимера и установлена с возможностью торцевого поджатия, в корпусе смонтирован секторный диск, закрепленный на одной из шестерен зубчатой передачи, и его датчик вращения, электрически связанный с контроллером. Контроллер расположен внутри корпуса автоматического узла перемещения, в месте крепления ходового винта установлен датчик продольного усилия ходового винта, электрически связанный с контроллером. Достигается дозированное перемещение опор аппарата внешней фиксации при снижении массы и габаритов аппарата с обеспечением обратной связи в виде контроля возникающих усилий в месте крепления ходового винта. 2 н. и 3 з.п. ф-лы, 3 ил.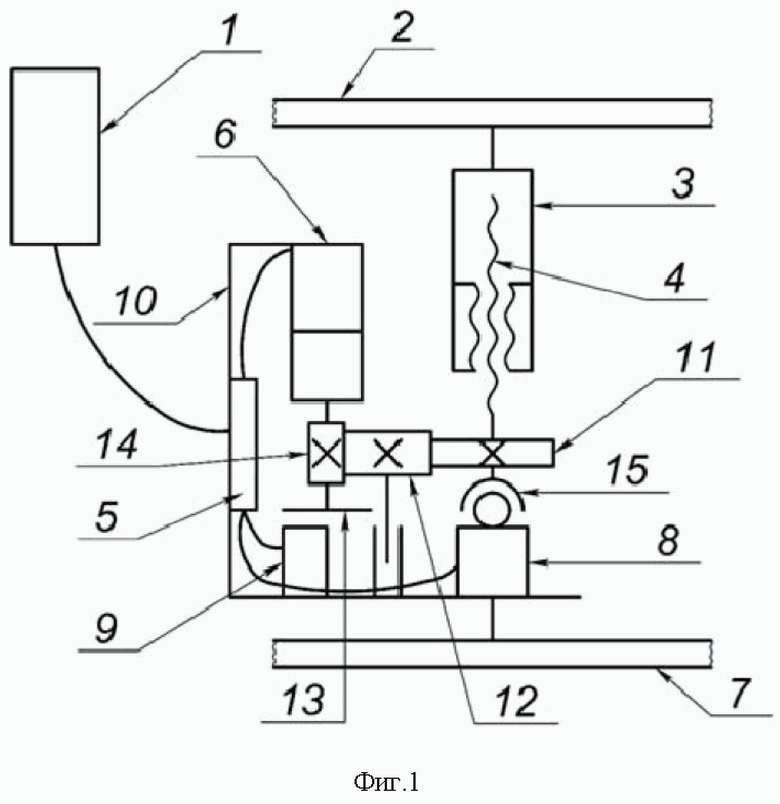
1. Чрескостный автоматизированный дистракционный аппарат, содержащий опоры, соединенные между собой автоматическими узлами перемещения, каждый из которых включает в себя мотор-редуктор, электрически связанный с контроллером, и ходовой винт с гайкой, причем автоматический узел перемещения выполнен в виде корпуса с размещенной в нем зубчатой передачей, связывающей между собой ходовой винт и мотор-редуктор, гайка ходового винта выполнена из хладотекучего антифрикционного фторсодержащего полимера и установлена с возможностью торцевого поджатия, в корпусе смонтирован секторный диск, закрепленный на одной из шестерен зубчатой передачи, и датчик вращения секторного диска, электрически связанный с контроллером, отличающийся тем, что контроллер расположен внутри корпуса автоматического узла перемещения, в месте крепления ходового винта установлен датчик продольного усилия ходового винта, электрически связанный с контроллером.
2. Чрескостный автоматизированный дистракционный аппарат по п.1, отличающийся тем, что электропитание автоматического узла перемещения осуществляется от вынесенных в базовый блок батареек типа АА.
3. Чрескостный автоматизированный дистракционный аппарат по п.1, отличающийся тем, что корпус автоматического узла перемещения в основании содержит платформу, на которой размещены элементы зубчатой передачи, с возможностью крепления к ней кожуха мотор-редуктора.
4. Чрескостный автоматизированный дистракционный аппарат по п. 1, характеризующийся тем, что имеет опоры 2 и 7, соединенные между собой автоматическими узлами перемещения, каждый из которых содержит закрепленный на одной опоре корпус, в котором установлен мотор-редуктор, зубчатую передачу, передающую усилие вращения редуктора на ходовой винт, проходящий через гайку из антифрикционного материала, установленную в трубке и поджатую по торцу полым толкателем, передающим усилие растяжения на другую опору, оптопару, снабженную секторным диском, и вынесенный базовый блок для управления мотор-редуктором, электрически связанный с узлами перемещения посредством кабеля, ходовой винт, выполненный с возможностью опираться на тензометрический датчик усилия, установленный в корпусе и электрически соединенный с процессорной платой управления с контроллером для управления мотор-редуктором, также размещенной в корпусе и соединенной проводами с выходом оптопары датчика положения вала мотор-редуктора, содержащего посаженный на вал перфорированный секторный диск и отражатель, установленный в корпусе, плату управления с контроллером, через соединительный кабель из трех проводов соединенную электрически с базовым блоком управления, выполненным с возможностью введения программы лечения, выраженной через динамику дистракционных усилий и отражаемой на смартфоне, планшете или персональном компьютере, один провод соединительного кабеля выполнен с возможностью обмена информацией между базовым блоком управления и платой с контроллером для управления мотор-редуктором, в то время как два провода кабеля выполнены с возможностью подачи питания от размещенных в блоке управления химических элементов питания.
5. Автоматический узел перемещения для чрескостного автоматизированного дистракционного аппарата, включающий в себя корпус, мотор-редуктор и ходовой винт с гайкой, в корпусе размещена зубчатая передача, связывающая между собой ходовой винт и мотор-редуктор, гайка ходового винта выполнена из хладотекучего антифрикционного фторсодержащего полимера и установлена с возможностью торцевого поджатия, в корпусе смонтирован секторный диск, закрепленный на одной из шестерен зубчатой передачи, и датчик вращения секторного диска, отличающийся тем, что внутри корпуса с мотор-редуктором расположен контроллер, электрически связанный с датчиком вращения секторного диска, и в месте крепления ходового винта установлен датчик продольного усилия ходового винта, электрически связанный с контроллером.
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ ПЛАТОВА | 1991 |
|
RU2061429C1 |
| Предохранительное приспособление для включения в действие пресса и иных подсобных машин | 1932 |
|
SU30073A1 |
| US 4973331 A1, 27.11.1990 | |||
| ОРТОПЕДИЧЕСКИЙ АППАРАТ ОСТЕОСИНТЕЗА | 2006 |
|
RU2339332C2 |
| US 20170196499 A1, 13.07.2017. | |||

