Изобретение относится к области контрольно-измерительной техники, а именно к способам измерений сил, моментов сил, импульсов с помощью резонансных механических колебательных систем и может быть использовано для создания новой сверхчувствительной контрольно-измерительной аппаратуры в авиационной, космической технике, средств контроля и диагностики в энергонапряженных объектах и в других областях науки и техники.
Известен способ измерения амплитуды механических колебаний объекта, основанный на размещении бесконтактного датчика скорости вблизи исследуемого объекта и регистрации выходного сигнала, измерении интервалов времени между точками достижения экстремального и нулевого значений этого сигнала (А.В.Мозурас и К.М.Рагульскис, авторское свидетельство SU №1791727 А1, МКИ G01Н 17/00, Б.И. №4, 30.01.1993).
Наиболее близкое техническое решение (прототип) описано в способе измерения сил и других физических величин с помощью резонансной колебательной системы (Горелик Г.С. Колебания и волны. - М.: Издат-во физико-математической литературы, 1959). В отмеченном способе на основе периодического воздействия измеряемой величины на колебательную системы с частотой, равной ее резонансной частоте, приводят систему в режим резонансной раскачки и по амплитуде колебаний судят о величине измеряемого воздействия.
Недостатками аналога и прототипа является невозможность измерения малых воздействий моментов сил (сил, импульсов) на колебательную систему, когда эта величина меньше порога чувствительности, а чувствительность системы невозможно увеличить при традиционных режимах работы с использованием отмеченного принципа резонансной раскачки. Кроме того, в этих работах не учтено влияние на измерения действий сил сухого трения, которые в ряде случаев следует учитывать при измерениях с резонансными системами.
Технической задачей изобретения является увеличение чувствительности резонансной колебательной системы как средства измерения момента сил.
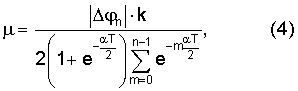
Технический результат достигается тем, что в известном способе измерения момента силы на основе периодического воздействия на резонансную колебательную систему измеряемого момента μ с частотой, равной резонансной частоте системы ω и имеющей порог чувствительности μп, колебательную систему при μ<μп дополнительно приводят в возбужденное состояние за счет внешнего воздействия, много большего μп, приводят ее далее в режим вынужденных колебаний под воздействием измеряемого момента μ с сдвигом фаз между ним и затухающими колебаниями системы, последовательно принимающим значения Δβ=nπ, где n=0, 1, 2, ..., и по разности амплитуд в этих режимах Δϕn определяют неизвестную величину момента по формуле

где k - коэффициент жесткости колебательной системы, α - ее коэффициент затухания.
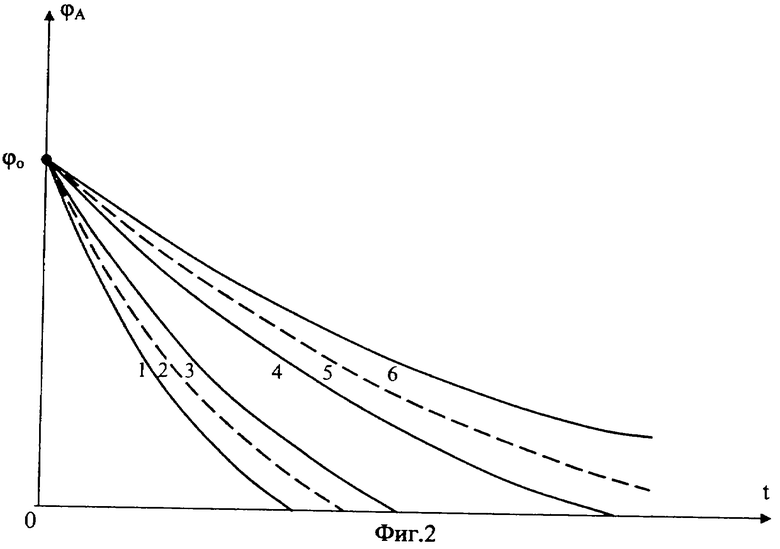
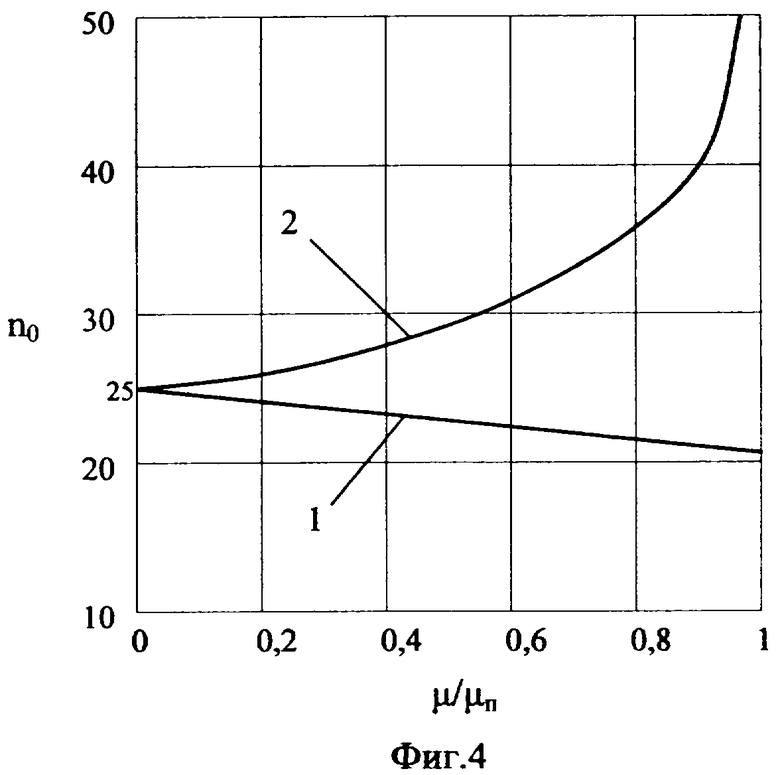
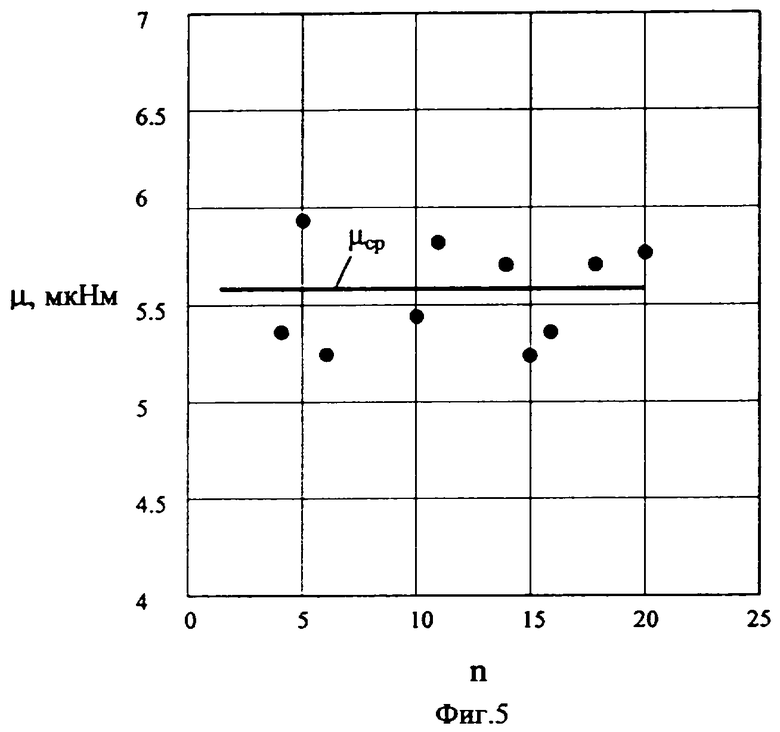
Изобретение поясняется чертежами, где на фиг.1 представлены графики изменения угла поворота колебательной системы и изменения момента сил, на фиг.2 - режимы торможения колебательной системы, на фиг.3 - изменения амплитуды угла поворота колебательной системы от количества интервалов торможения, на фиг.4 - изменение предельного числа интервалов торможения nо от относительной величины изменяемого момента μ/μп, на фиг.5 - результаты расчета момента внешней силы по экспериментальным данным.
Изобретение состоит из:
фиг.1, где показаны свободные затухающие колебания системы при μ(t)=0(а) и изменения момента сил  (б), ϕ - угол поворота колебательной системы,
(б), ϕ - угол поворота колебательной системы,  - его производная по времени, ϕ0 - начальный угол, α - коэффициент затухания, t - время, μп - момент силы сухого трения, μ - измеряемый момент, Т - период свободных затухающих колебаний системы, n - количество интервалов торможения;
- его производная по времени, ϕ0 - начальный угол, α - коэффициент затухания, t - время, μп - момент силы сухого трения, μ - измеряемый момент, Т - период свободных затухающих колебаний системы, n - количество интервалов торможения;
фиг.2, где ϕА - амплитуда колебаний угла ϕ,  2-μ=0,
2-μ=0, 
 5-μ(t)=0,
5-μ(t)=0, 
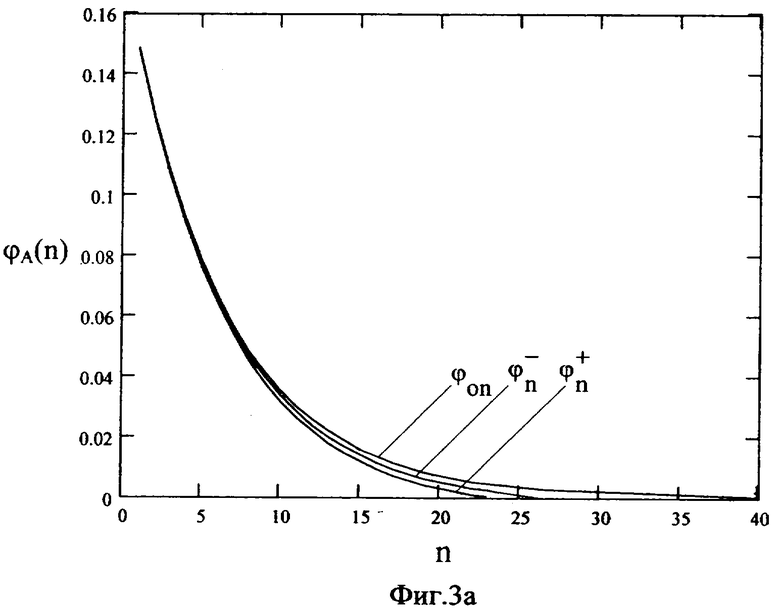
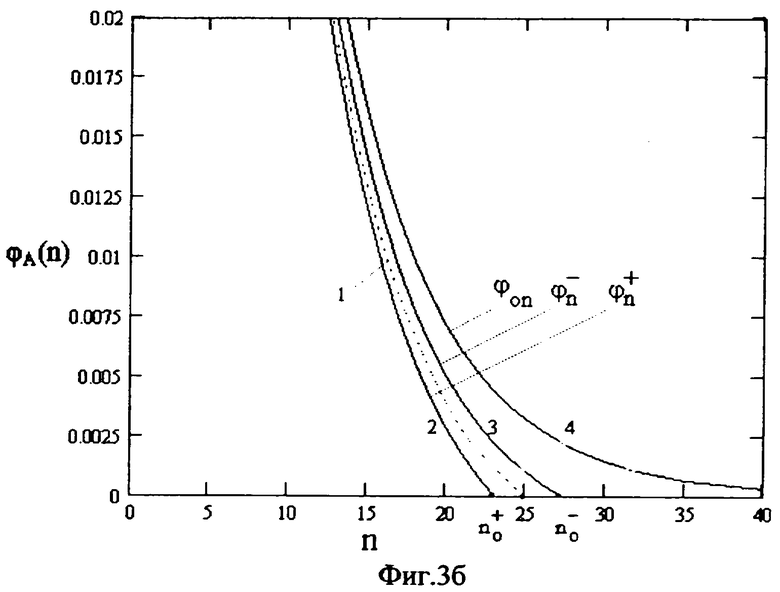
фиг.3а и 3б, где n0 - число интервалов торможения, когда ϕА→0, кривые 1, 2, 3 соответствуют режимам торможения 1, 2, 3 на фиг.2, кривая 4 - свободным затухающим колебаниям (при μ(t)=0);
фиг.4, где кривая 1 соответствует |μ(t)|=μп+μ, 2-|μ(t)|=μп-μ;
фиг.5, где точками обозначены экспериментальные данные по результатам измерений ϕА, μср - усредненное значение момента внешней силы.
Одними из важнейших свойств любой колебательной системы являются порог чувствительности и чувствительность. Механические колебательные системы могут быть использованы, например, для измерения малых усилий, моментов, импульсов и т.п. Однако возможности такой системы ограничены порогом чувствительности, когда измерение малых и сверхмалых физических величин невозможно. Проведенные исследования колебательных систем позволили найти такие режимы их работы, которые дают возможность исключить указанный недостаток в новом способе измерений и увеличить чувствительность системы.
Рассмотрим в качестве примера измерительное средство - маятник крутильных колебаний, имеющий момент инерции J, коэффициент затухания α, круговую частоту свободных колебаний ω0 и порог чувствительности μп - момент сил сухого трения (флуктуациями сил в рассматриваемом случае пренебрегаем). Пусть на маятник действует неизвестный внешний постоянный момент μ, меньший порога чувствительности μп. Угол поворота маятника относительно вертикальной оси вращения обозначим ϕ. Если колебательную систему привести в возбужденное состояние, а затем с помощью специального устройства (ключа) воздействовать на нее измеряемым моментом в противофазе по отношению к затухающим свободным колебаниям, то их амплитуда начнет уменьшаться быстрее, чем при отсутствии внешнего воздействия. Измеряя эту амплитуду, можно определить величину действующего на систему момента. Следовательно, измерение возможно даже при μ<μп. На фиг.1а показаны затухающие колебания системы, приведенной в возбужденное состояние (ϕ=ϕ0) при отсутствии на нее внешних воздействий.
В работе автора (С.И.Коршаковский. О новых свойствах колебательных систем. Объединенный научный журнал, №10, 2006) было рассмотрено нелинейное неоднородное дифференциальное уравнение для углов поворота колебательной системы в режиме торможения

Величину момента μп, который, собственно, и определяет порог чувствительности, следует считать постоянной и имеющей сдвиг фаз Δβ=π по отношению к свободным затухающим колебаниям (Н.В.Бутенин и др. Введение в теорию нелинейных колебаний. - М.: Изд-во «Наука», 1987), - т.е. как и для измеряемого момента μ в режиме торможения системы. При этом μ(t)=μп+μ (фиг.1б), сплошная линия).
Для увеличения эффективности способа одновременно следует рассмотреть другой режим, когда μ изменяется в фазе с затухающими колебаниями (Δβ=0) - то есть по тому же закону, что и при резонансной раскачке (фиг.1б, пунктирная линия). Так как μ<μп, то в обоих случаях имеет место режим торможения маятника. Если торможение происходит в течение каждого полупериода, величины μп и μ за это время не изменяются, то с учетом сдвига фаз Δβ слагаемое  в уравнении (1) можно перенести в правую часть как константу. При этом рассматриваемое устройство будет находиться в режиме вынужденных колебаний с амплитудой ϕA→0, а уравнение (1) станет линейным и запишется в виде
в уравнении (1) можно перенести в правую часть как константу. При этом рассматриваемое устройство будет находиться в режиме вынужденных колебаний с амплитудой ϕA→0, а уравнение (1) станет линейным и запишется в виде

где  . Такую колебательную систему для каждого полупериода следует определить как квазилинейную. Таким образом, при уменьшении угла отклонения (фиг.1а)
. Такую колебательную систему для каждого полупериода следует определить как квазилинейную. Таким образом, при уменьшении угла отклонения (фиг.1а)  μ(t)>0, при увеличении этого угла - наоборот. Зависимости ϕ(t) и μ(t) для нескольких интервалов торможения системы показаны на фиг.1.
μ(t)>0, при увеличении этого угла - наоборот. Зависимости ϕ(t) и μ(t) для нескольких интервалов торможения системы показаны на фиг.1.
Решение уравнения (2) для огибающей  угла поворота колебательной системы можно найти, решая последовательность задач Коши для каждого полупериода торможения резонансной колебательной системы n, где n=1, 2, ... - номер шага:
угла поворота колебательной системы можно найти, решая последовательность задач Коши для каждого полупериода торможения резонансной колебательной системы n, где n=1, 2, ... - номер шага:

где ϕn- амплитуда угла поворота системы на n-м полупериоде торможения,  - коэффициент жесткости при кручении, ϕ0 - начальный угол поворота системы. Знаки ± при μ определяют режим торможения системы, когда сдвиг фаз между μ и μп соответственно равен 0 или π. Вычитая далее из
- коэффициент жесткости при кручении, ϕ0 - начальный угол поворота системы. Знаки ± при μ определяют режим торможения системы, когда сдвиг фаз между μ и μп соответственно равен 0 или π. Вычитая далее из  величину
величину  , можно получить выражение для нахождения искомого измеряемого момента μ:
, можно получить выражение для нахождения искомого измеряемого момента μ:
из которого видно, что его величина не зависит от порога чувствительности.
Важно также отметить, что определяемая таким образом величина μ, не зависит от количества интервалов торможения n.
Аналогично можно получить решение дифференциального уравнения при резонансной раскачке (см., например, Г.С.Горелик. Колебания и волны. - М.: издательство Физико-математической литературы, 1959), когда измеряемый момент μ=М много больше момента, обусловленного силами сухого трения μп (третьим слагаемым в уравнении (1) можно пренебречь):

Оценка чувствительности колебательной системы в режиме торможения дает следующий результат:

Из сравнения (5) и (6) видно, что чувствительность устройства в рассмотренном режиме торможения вдвое выше, чем при резонансной раскачке.
Определим число шагов n=n0, при котором в режиме торможения прекращаются колебания системы ( ). В силу существования порога чувствительности при малых углах отклонения ϕn дальнейшие колебания невозможны, когда
). В силу существования порога чувствительности при малых углах отклонения ϕn дальнейшие колебания невозможны, когда

Ha фиг.2 показано изменение амплитуды угла поворота для рассмотренной колебательной системы с порогом чувствительности, равном моменту сил сухого трения μп (кривые 1, 2, 3). Пунктирной кривой 2 показано изменение ϕA(t) при отсутствии внешней силы (μ=0). При этом  , колебания системы вынужденные, ϕA→0. При воздействии внешнего момента μ в фазе с μп нулевой уровень колебания достигают быстрее: кривая 1 на рисунке, где
, колебания системы вынужденные, ϕA→0. При воздействии внешнего момента μ в фазе с μп нулевой уровень колебания достигают быстрее: кривая 1 на рисунке, где  . Если μ и μп в противофазе (внешняя сила наоборот "поддерживает" затухающие колебания), нулевой уровень колебаний наступит позднее (кривая 3).
. Если μ и μп в противофазе (внешняя сила наоборот "поддерживает" затухающие колебания), нулевой уровень колебаний наступит позднее (кривая 3).
Для системы с малой силой трения покоя порог чувствительности определяется в основном тепловыми флуктуациями, спектральная плотность которых постоянна на всех частотах и равна 4kТН, где k - постоянная Больцмана, Н - коэффициент трения, Т - абсолютная температура (теорема Найквиста). Условие классического приближения для порогового значения силы  , где М - масса механического осциллятора, Δf - полоса частот, рассмотрена в работе Брагинского В.Б. и др. "Системы с малой диссипацией". - М.: изд-во "Наука", 1981.
, где М - масса механического осциллятора, Δf - полоса частот, рассмотрена в работе Брагинского В.Б. и др. "Системы с малой диссипацией". - М.: изд-во "Наука", 1981.
Однако даже в этом случае момент внешней силы может быть измерен, даже если его величина меньше "нового" порога чувствительности. Соответствующие режимы торможения (момент μп в формулах (3,7) равен нулю) показаны на фиг.2 (кривые 4, 5, 6). При этом измеряемый момент, как и в предыдущем случае, по отношению к затухающим колебаниям системы находится в фазовом соотношении π и 0 - кривые 4 и 6 на фиг.2 соответственно, кривая 5 - при отсутствии внешнего воздействия, когда ϕA=ϕ0e-αt. Так как фаза флуктуации случайна, соответствующие кривые могут быть построены путем усреднения измеренных амплитуд при различных n, а все три кривые 4, 5, 6 рассматриваемых режимов пересекаются в одной точке с координатами (0, ϕ0), что является критерием достоверности результатов измерений.
Ниже представлены некоторые результаты экспериментального исследования режимов работы маятника крутильных колебаний, а также данные проведенных расчетов с использованием полученных формул. Параметры системы: J=0,1 кг·м2, k=0,062 Н·м, α=0,04 1/с, Т=8 с. Порог чувствительности по экспериментальным данным равен μп=16,5·10-6 Нм. Чувствительность устройства в соответствии с выражением (6) составляет величину S=0,71 рад/Нм. Режим торможения осуществлялся при следующих начальных условиях: ϕ0=0,1745 рад (10°);  .
.
На фиг.3 показаны характерные изменения амплитуды угла поворота этой системы ϕА(n) от количества интервалов действия тормозящей силы n при различных режимах, рассчитанные с помощью формулы (3), где ϕA=|ϕn|. Для наглядности две части рисунка представлены в разных масштабах по ϕА. Величина μ при расчете была принята равной 5,5×10-6 Нм - меньше порога чувствительности μп. При отсутствии измеряемого момента (μ=0) на систему действует только момент сил трения μп, при этом ее колебания стремятся к нулю, достигая этой отметки при n0=25 по данным расчета (кривая 1 на чертеже). Причем, чем больше порог чувствительности, тем быстрее амплитуда угла стремится к нулю. При сложении с моментом внешних сил (μ≠0) вынужденные колебания достигают нулевого уровня еще быстрее (кривая 2). Если же измеряемая величина момента μ находится в противофазе по отношению к действующему моменту μп, соответственно нулевой уровень колебаний достигается позднее:  (кривая 3). Для сравнения на чертеже также показано изменение амплитуды угла поворота от количества интервалов n при свободных колебаниях системы (кривая 4), что соответствует решению дифференциального уравнения (2), когда μ(t)=μ±μп=0. При этом n0→∞, ϕn→0 (второе слагаемое выражения (3)). Кривые 1, 2, 3, 4 соответствуют кривым 2, 1, 3 и 5 на фиг.2.
(кривая 3). Для сравнения на чертеже также показано изменение амплитуды угла поворота от количества интервалов n при свободных колебаниях системы (кривая 4), что соответствует решению дифференциального уравнения (2), когда μ(t)=μ±μп=0. При этом n0→∞, ϕn→0 (второе слагаемое выражения (3)). Кривые 1, 2, 3, 4 соответствуют кривым 2, 1, 3 и 5 на фиг.2.
На фиг.4 показаны изменения предельного количества интервалов торможения n0 от относительной величины измеряемого момента μ/μп при двух режимах работы исследуемого устройства. Если μ и μп совпадают по фазе, то величина n0 уменьшается почти линейно (кривая 1). При сдвиге фаз между μ и μп, равном π, n0 увеличивается тем быстрее, чем больше μ (кривая 2). При μп→μ n0→∞, что соответствует кривой 4 на фиг.3.
Так как величина измеренного момента меньше порога чувствительности, экспериментальное подтверждение полученных результатов можно получить только используя косвенные измерения, а также сравнение прямых измерений углов поворота колебательной системы в режимах торможения при одних и тех же n и значений этих углов, полученных из решения (2) соответствующего дифференциального уравнения. В таблице и на фиг.5 приведены экспериментальные данные исследований и результаты расчета. При относительной точности измерений углов 10% видно достаточно хорошее совпадение теории и эксперимента, а также независимость результата определения момента μ от количества интервалов торможения n.
экспериментальных данных и результатов расчета , рад
, рад , рад
, рад
Кроме компенсации порога чувствительности и увеличения чувствительности резонансной колебательной системы, рассмотренные режимы ее работы дают возможность:
- уменьшить продолжительность измерения до одного периода колебаний, что значительно меньше, чем в режиме резонансной раскачки;
- проводить измерения при неуспокоенной системе, что также позволяет уменьшить время измерений;
- полученные соотношения не накладывают ограничений на число колебаний и добротность системы.
Рассмотренные свойства механических колебательных систем присущи для широкого класса колебательных систем. Это дает возможность использовать полученные результаты и предложенный способ измерений для построения резонансных колебательных систем на новых принципах в самых широких областях науки и техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ СВЕРХМАЛЫХ РАДИОСИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2359406C2 |
| Способ определения характеристики внутреннего трения в гибком элементе | 1981 |
|
SU1002896A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНОЙ ТЯГИ ДВИЖИТЕЛЯ ПЛАЗМЕННОГО ТИПА | 1975 |
|
SU1841108A1 |
| КВАЗИУДАРНЫЙ ЦЕНТРОБЕЖНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 1997 |
|
RU2121889C1 |
| МАГНИТОВЯЗКИЙ МАЯТНИК | 2005 |
|
RU2291546C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНЫХ ХАРАКТЕРИСТИК СРЕД И ФИЗИЧЕСКИХ ВЕЛИЧИН ПЛОТНОСТИ И ДАВЛЕНИЯ | 1998 |
|
RU2149390C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ | 1999 |
|
RU2163358C2 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| СПОСОБ ЭЛЕКТРОАКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2045025C1 |
Изобретение относится к области контрольно-измерительной техники. Техническим результатом изобретения является повышение чувствительности. Способ измерения момента силы основан на периодическом воздействии на резонансную колебательную систему измеряемого момента μ с частотой, равной резонансной частоте системы ω и имеющей порог чувствительности μп. При этом, когда μ<μп колебательную систему приводят в возбужденное состояние за счет внешнего воздействия, много большего μп, приводят ее далее в режим вынужденных колебаний под воздействием измеряемого момента μ с сдвигом фаз между ним и затухающими колебаниями системы, последовательно принимающим значения Δβ=nπ, где n=0, 1, 2, ..., и по разности амплитуд в этих режимах Δϕп определяют неизвестную величину момента по формуле

где k - коэффициент жесткости колебательной системы, α - ее коэффициент затухания. 5 ил., 1 табл.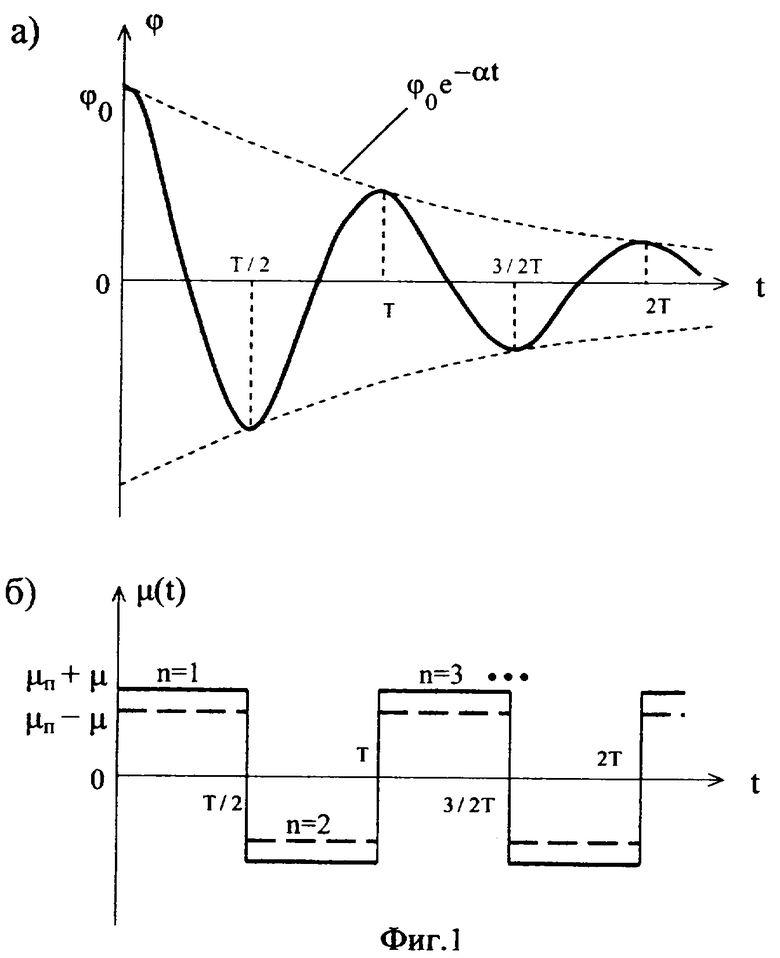
Способ измерения момента силы на основе периодического воздействия на резонансную колебательную систему измеряемого момента μ с частотой, равной резонансной частоте системы ω и имеющей порог чувствительности μп, отличающийся тем, что при μ<μп колебательную систему приводят в возбужденное состояние за счет внешнего воздействия, много большего μп, приводят ее далее в режим вынужденных колебаний под воздействием измеряемого момента μ со сдвигом фаз между ним и затухающими колебаниями системы, последовательно принимающим значения Δβ=nπ, где n=0, 1, 2, ..., и по разности амплитуд в этих режимах Δϕn определяют неизвестную величину момента по формуле:

где k - коэффициент жесткости колебательной системы, α - ее коэффициент затухания.
| Способ измерения силы | 1980 |
|
SU877368A1 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| US 5085070 А, 04.02.1992 | |||
| US 3788410 А, 29.01.1974 | |||
| Отстойник для очистки вод поверхностного стока | 1979 |
|
SU861325A1 |

