Изобретение относится к технике неразрушающего контроля физико-механических свойств материалов путем вдавливания в него индентора под статической нагрузкой и может быть использовано для измерения и контроля твердости и модуля упругости изделий.
Наиболее близким к предлагаемому по технической сущности и получаемому эффекту является способ контроля твердости материалов и устройство для его осуществления [1] Способ основан на электроакустическом импендансном методе контроля твердости путем вдавливания в материал индентора под нагрузкой, возбуждения в нем диссипативного колебательного процесса импульсным воздействием и определения декремента его затухания, по величине которого судят о твердости.
Известное устройство содержит магнитострикционный стержень с жестко закрепленный на нем индентором, датчиком колебательной скорости и инерциальной массой с пружиной, взаимодействующей со стержнем, последовательно соединенные с датчиком усилитель напряжения и амплитудный детектор, выход которого соединен с входами первого и второго блоков стробирования, управляющие входы которых соединены соответственно с первым и вторым формирователями строб-импульсов, вход первого формирователя последовательно через блок задержки соединен с входом второго формирователя и выходом генератора импульсов, нагруженного на катушку возбуждения стержня, а первый и второй блоки стробирования соединены последовательно через свой соответственно первый и второй блоки логарифмирования и второй и третий амплитудные детекторы с арифметическим блоком, выход которого подключен к индикатору.
Основной недостаток известного способа заключается в низкой точности измерения твердости, обусловленной влиянием реактивности инерциальной массы преобразователя на формирование фронта нарастания его колебательной скорости и на развитие в нем процесса затухания резонансных колебаний. Это влияние выражается в уменьшении амплитуды переднего фронта колебательной скорости относительно максимальной за счет конечного времени его развития, что затрудняет ее измерение с достаточной точностью в качестве аргумента для нахождения декремента затухания по известному способу-прототипу. Это влияние выражается также в смещении закона затухания процесса относительно экспоненциального за счет увеличения постоянной времени этого затухания на значение величины модуля реактивного сопротивления инерциальной массы подвижной системы электроакустического преобразователя. Причем в ультразвуковом диапазоне активированных в нем резонансных колебаний механическое реактивное сопротивление инерциальной массы оказывается существенным относительно активного сопротивления контролируемого импеданса, т.е. твердости материала. Это обуславливает нелинейность зависимости между декрементами затухания и контролируемой твердостью.
Недостатки устройства прототипа обусловлены тем, что оно осуществляет заложенные в способе недостатки и подчеркивает их, так как основой алгоритма его работы является измерение фактической амплитуды колебательной скорости с указанными методическими погрешностями и определение контролируемой твердости по величине декремента затухания без учета нелинейности их зависимости.
Кроме того, точность измерения твердости по известному способу снижается в результате влияния заднего фронта выбранного вида тестового импульсного возбуждения преобразователя на процесс формирования амплитуды переднего фронта колебательной скорости. Так как импульс возбуждения колебаний выбран в прототипе коротким, его спад, имея встречную тенденцию относительно переднего фронта нарастания колебательной скорости, способствует дистабилизации процессов формирования его вершины, значение амплитуды которой является аргументом уравнения преобразования прототипа.
Известный способ не обеспечивает также контроля модуля упругости изделий, что снижает область его применения и проявляется как недостаток прототипа.
Наконец, известные способ и устройство обладают низким быстродействием измерения, так как его уравнение преобразования требует проведения измерений в конечной фазе затухающего процесса активированных в преобразователе резонансных автоколебаний.
Целью изобретения является повышение точности измерения твердости контролируемых материалов, получение возможности контроля модуля упругости материалов и повышение быстродействия измерения.
Для этого в способе электроакустического контроля твердости материала, заключающемся в том, что на материал воздействуют магнитострикционным инерционным преобразователем с индентором, при этом последний внедряют в указанный материал, а упомянутый преобразователь импульсно возбуждают, измеряют резонансную частоту затухающих колебаний стержня этого преобразователя и по ее значению определяют твердость материала, отличием является то, что силу указанного внедрения в материал поддерживают постоянной за все время измерительного цикла, дополнительно замеряют максимальную по модулю амплитуду колебательной скорости стержня, соответствующую во времени моменту прохождения через ноль инерционной составляющей реактивного сопротивления полного механического импеданса указанного стержня с инерциальной массой, а твердость материала определяют по соотношениям
Rx= 2 M  ,
,
Ex=  2M
2M , где Rх контролируемая твердость материала, кг/с;
, где Rх контролируемая твердость материала, кг/с;
Ех контролируемый модуль упругости материала, кг/с2;
М масса колебательной системы, кг;
ωр угловая резонансная частота затухающих колебаний, 1/с;
Fо модуль силы тестового воздействия, кг˙м/с2;
Vмакс- модуль максимальной амплитуды колебательной скорости индентора, м/с.
Кроме того, длительность измерительного цикла выбирают равной трем или любому целому нечетному числу больше трех полупериодам резонансной частоты затухающего клебательного процесса и возбуждают последующие измерительные циклы импульсным воздействием тестовой силы противоположного знака таким образом, чтобы фаза резонансных колебаний на границе соседних измерительных циклов оставлялась неизменной до и после воздействия.
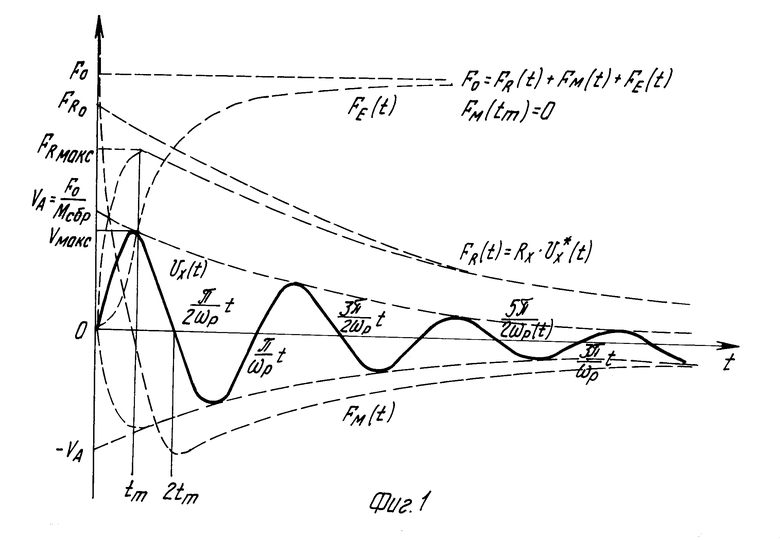
На фиг. 1 приведены временные диаграммы динамических процессов в колебательной системе.
Сущность способа состоит в следующем.
Колебательская скорость индентора в контакте с контролируемым материалом определяется импульсом тестовой силы воздействия и механическим импедансом колебательной системы, зависящим как от активной и реактивной составляющих сопротивления материала, т.е. от микротвердости и упругости в зоне контакта контролируемого импеданса с активированным индентором, так и от инерциальной реактивности преобразователя.
В установившемся режиме контакта индентора с материалом после его внедрения эта скорость при импульсном скачке силы тестового воздействия определяется уравнением
vx(t) 
 , (1)
, (1)
[Z ]
]  , (2) где [Zx] модуль полного механического импеданса системы, кг/с;
, (2) где [Zx] модуль полного механического импеданса системы, кг/с;
Rх контролируемая твердость материала, кг/с;
Ех контролируемый модуль упругости, кг/с2;
М масса колебательной системы, кг;
Fо тестовая сила воздействия, кг˙м/с2;
ωр угловая резонансная частота колебаний, 1/с.
Уравнение колебательной скорости во временной форме получим из следующих промежуточных преобразований выражения (1) в операторной форме
vx(p) 

 ·
· 

 =
= 
 (3) откуда после обратного преобразования Лапласа получим оригинал Vx(t) в виде
(3) откуда после обратного преобразования Лапласа получим оригинал Vx(t) в виде
vx(t)  eβt· sin ωPt vA·eβt· sin ωPt (4) где Р оператор Лапласа;
eβt· sin ωPt vA·eβt· sin ωPt (4) где Р оператор Лапласа; изображение тестовой силы при одиночном импульсном скачке амплитудой Fо.
изображение тестовой силы при одиночном импульсном скачке амплитудой Fо.
ωP=  , (5) где ωр угловая резонансная частота затухающих автоколебаний, 1/с;
, (5) где ωр угловая резонансная частота затухающих автоколебаний, 1/с;
τx= 1/β 2  , (6) где τх постоянная времени затухания резонансных автоколебаний, с;
, (6) где τх постоянная времени затухания резонансных автоколебаний, с;
vA=  , (7) где VА амплитудный коэффициент уравнения (4).
, (7) где VА амплитудный коэффициент уравнения (4).
Временная диаграмма колебательной скорости Vx(t) приведена на фиг.1 сплошной линией.
Как видно из (4) и эпюры фиг.1, колебательная скорость носит гармонический затухающий характер, обусловленный динамическим процессом перераспределения колебательной энергии системы, полученной в результате импульса тестового воздействия, между реактивными составляющими полного механического импеданса упругостью контpолируемого материала и инерциальной составляющей его колебательной массы. Затухание процесса обусловлено потерями на активном сопротивлении импеданса материала его твердости. Процесс носит диссипативный характер и аппроксимирует экспоненциальной огибающей с амплитудой переднего фронта VA Fo/Mωр(7) и постоянной времени τx -2M/Rх (6), как это показано на фиг.1 прерывистыми линиями, огибающими колебательную скорость.
При этом амплитуда VА колебательной скорости в нулевой момент времени не может быть измерена непосредственно в принципе, так как апроксимирующего процесс затухания сигнала не существует физически. Согласно способу прототипа фактически измеряют амплитуду Vмаксколебательной скорости в момент времени tm завершения формирования переднего фронта и вершины этого сигнала (фиг.1). Очевидно, что Vмакс < VА во всем диапазоне измерения твердости, что является основным источником погрешности при определении декремента как функции твердости согласно известному способу.
В отличие от прототипа, в предлагаемом изобретении измеряют мгновенное значение колебательной скорости в момент времени tх равенства нулю модуля инерциального реактивного сопротивления полного импеданса колебательной системы в контакте с контролируемым материалом. При этом условии мгновенное значение колебательной скорости Vx(tx) согласно (1) определяется только твердостью и модулем упругости контролируемого материала и инварианте к инерциальной составляющей реактивного сопротивления механического импеданса на основании (2).
Определим этот момент времени tх. Для этого выведем динамическое уравнение распределения тестовой силы Fo во времени на инерциальном реактивном сопротивлении колебательной системы. Воспользуемся операторным методом
Fm(P) Fo(P) 
 ·
·  = F
= F
Fo·  , (8) где P1 и P2=
, (8) где P1 и P2=  ∓
∓  -β ∓ ωP; (9)
-β ∓ ωP; (9)
Р1 и Р2 корни (полюсы) характеристического уравнения для выражения (8), причем соотношение корней квадратного уравнения описывается системой:
P1+P2=  -2β,
-2β,
P1·P2=  , (10)
, (10)
P1-P2= -2  -2ωP
-2ωP
Оригинал изображения (8) запишется тогда в виде
Fm(t) F
 (p2e
(p2e - p1e
- p1e ) (11)
) (11)
Временные диаграммы силы Fm(t) и других составляющих тестовой силы fo в динамике приведены на фиг.1 штрихпунктирными линиями. При этом для любого текущего момента времени баланс сил описывается уравнением
Fm (t) + F (t) + F
(t) + F (t) Fo (12)
(t) Fo (12)
Из (11) несложно определить искомый момент времени прохождения функции Fm(t) через ноль:
Fm(t) 0 __→ e =
=  __→ tx
__→ tx (13)
(13)
Найдем соотношение этого момента времени tх с временными характеристиками (аномальными точками) информационного сигнала колебательной скорости Vx(t). Для этого выведем уравнение аппроксимирующей процесс развития колебаний кривой на основании (3).
Запишем (3) в виде
v

 (14) где Р1 и Р2 описываются (9) и (10).
(14) где Р1 и Р2 описываются (9) и (10).
Из (14), произведя обратное преобразование Лапласа, определим оригинал выражения для аппроксимирующей колебательный процесс кривой в виде
v (e
(e - e
- e ). (15)
). (15)
Найдем момент времени максимума tm этой кривой на основании 0 ___→ e
0 ___→ e
 ___→ tm
___→ tm (16)
(16)
Сравнивая (13) и (16), определяем
tx= tm=  . (17)
. (17)
Таким образом, установлено, что момент времени tх, когда инерциальная реактивность колебательной системы не оказывает влияния на формирование мгновенного значения колебательной скорости Vx(tx), совпадает с моментом времени tm первого максимума этой скорости, а мгновенное значение этой скорости в этот момент времени равно Vмакс и может быть легко определено путем непосредственного измерения (фиг.1).
При этих условиях получаем первое уравнение преобразования твердости Rх и модуля упругости Eх контролируемых материалов на основании (1) и (2) при учете равенства нулю модуля инерциального реактивного сопротивления полного механического импеданса системы в момент времени fm в виде
vx(tm) Vмакс=  . (18)
. (18)
Второе уравнение преобразования получаем на основании (5) в виде ω
ω . (19)
. (19)
Решая совместно уравнения преобразования (18) и (19), окончательно будем иметь
Rx= 2M  .
.
(20)
Ex=  2 M
2 M .
.
Таким образом, изобретательский уровень предлагаемого способа заключается в том, что дополнительно к известному способу контроля твердости по прототипу измеряют резонансную частоту затухающих автоколебаний электроакустического преобразователя в контакте с контролируемым материалом, измеряют модуль максимальной амплитуды колебательной скорости индентора, совпадающей во времени с моментом прохождения через ноль инерциальной составляющей сопротивления полного механического импеданса колебательной системы, и определяют искомые параметры механического импеданса по формулам на основании (20), причем амплитуду импульса тестовой силы поддерживают постоянной в течение измерительного цикла. Это обеспечивает новое свойство способа повышение точности измерения твердости за счет универсальности во всем диапазоне измерения уравнения преобразования твердости и расширения функциональных возможностей способа за счет полученной возможности измерения второго параметра механического импеданса контролируемого материала его модуля упругости. Все это проявляется как положительный эффект изобретения относительно известного способа.
Кроме того, в предлагаемом способе заложены возможности существенного повышения быстродействия измерения относительно прототипа, в котором измерения осуществляют в завершающей стадии переходного затухающего процесса. Действительно, в предлагаемом изобретении для измерения величины максимальной амплитуды Vмакс колебательной скорости достаточно времени, равного или большего tm на основании (17), а для измерения резонансной частоты достаточно одного периода высокочастотных активированных резонансных автоколебаний. Иными словами, аргументы системы уравнений преобразования (20) могут быть определены в начальной фазе формирования переходного процесса колебательной системы за время, пренебрежимо малое относительно длительности измерительного цикла по способу-прототипу.
С целью обеспечения непрерывного измерительного процесса по сокращенному таким образом измерительному циклу в предлагаемом способе активацию последующих измерительных циклов осуществляют в конец третьего или любого целого нечетного числа больше трех полупериода резонансной частоты автоколебаний. С одной стороны, это обеспечивает длительность измерительного цикла достаточной для измерения аргументов системы уравнений преобразования (20), с другой стороны, это позволяет исключить разрыв фазы автоколебаний на границе измерительных циклов и исключить возможность процессов дробления информационного сигнала Vx(t) при формировании переднего фронта и вершины сигнала колебательной скорости в последующих измерительных циклах. Это осуществляется за счет фазовой синхронизации и совмещения тенденций развития колебательной скорости процесса, незавершившегося в предыдущий измерительный цикл, и тестового воздействия силой противоположного знака, активирующей последующий измерительный цикл в моменты времени, равные
Tцикла= N  , (21) где N 3, 5, 7, 9. целые нечетные числа, равные или больше трех.
, (21) где N 3, 5, 7, 9. целые нечетные числа, равные или больше трех.
Принцип фазовой синхронизации межцикловых тенденций по сокращенному таким образом измерительному циклу также является изобретательским уровнем изобретения, обеспечивает новое свойство предлагаемого способа возможность быстродействия измерения, и проявляется как положительный эффект.
Наконец, существенным преимуществом предлагаемого способа относительно прототипа является такое проявление совокупности указанных новых свойств изобретения, как инвариантность уравнений преобразования (20) к величине колебательной массы системы. Это позволяет обоснованно игнорировать влияние приращения колебательной массы подвижной системы электроакустического преобразователя за счет принудительной раскачки за время измерения эквивалентной массы конечного объема зоны контакта индентора с поверхностью контролируемых изделий. Инерциальная реактивность этой дополнительной массы, участвующей в колебательном процессе, также рана нулю в момент времени tm на основании (13) и величина вовлеченной в колебательный процесс части массы зоны контакта контролируемых изделий не отражается на формировании максимальной амплитуды колебательной скорости преобразователя и, как следствие, на результаты измерения контролируемых Rх и Ех по алгоритму (20).
Отличие устройства, позволяющего осуществить предлагаемый способ, заключается в том, что в известное устройство, содержащее магнитострикционный стержень с жестко закрепленными на нем индентором, датчиком колебательной скорости и инерциальной массой с пружиной, взаимодействующей со стержнем, последовательно соединенные с датчиком усилитель напряжения и амплитудный детектор, вычислительный блок, первый выход которого соединен с первым индикатором, а также генератор импульсов, нагруженный на катушку возбуждения стержня, дополнительно введены преобразователь частоты, блок управления и второй индикатор со своими цепями управления и оригинальными связями, в том числе вход блока управления соединен с выходом усилителя и входом преобразователя частоты, выход которого подключен к второму входу вычислительного блока, первый вход которого подключен к выходу амплитудного детектора, а второй выход вычислительного блока соединен с вторым индикатором, выход синхронизации блока управления подключен к входу синхронизации генератора импульсов, а первый, второй и третий выходы блока соединены с входами соответственно амплитудного детектора, преобразователя частоты и вычислительного блока.
Отличие устройства от известного заключается в том, что генератор импульсов выполнен по схеме знакопеременного синхронизируемого генератора постоянного по модулю тока.
Кроме того, блок управления содержит последовательно соединенные с его входом компаратор нуля, формирователь импульсов и счетчик-распределитель импульсов, первый выход которого подключен к первому выходу блока, второй выход к второму выходу блока, а третий выход счетчика-распределителя соединен с третьим выходом блока, входом сброса режима генерации мультивибратора и первым входом схемы ИЛИ, второй вход которой соединен с выходом мультивибратора, а выход схемы ИЛИ подключен к счетному входу триггера, неинверсирующий выход которого подключен к выходу синхронизации блока управления
Кроме того, для осуществления способа в части увеличения быстродействия измерения для случая длительности измерительного цикла, равной трем полупериодам резонансной частоты затухающего колебательного процесса, счетчик-распределитель импульсов в составе блока управления устройства выполнен по схеме трехтактного распределителя входных импульсов таким образом, что на первом выходе счетчика устанавливается логическая единица в течение первого такта входной трехтактной импульсной последовательности, на втором выходе в течение первых двух тактов, а на третьем выходе в течение третьего такта.
Наконец, отличие устройства от известного заключается и в том, что для осуществления способа в части увеличения быстродействия измерения для случая длительности измерительного цикла, равной любому нечетному числу больше трех полупериодов резонансной частоты затухающего колебательного процесса, счетчик-распределитель импульсов в составе блока управления устройства выполнен по схеме распределителя входных импульсов таким образом, что на первом его выходе устанавливается логическая единица в течение первого такта каждой входной импульсной последовательности выбранной длины, на третьем выходе в течение каждого последнего такта, а сигнал с второго выхода счетчика-распределителя является инверсией сигнала с его третьего выхода.
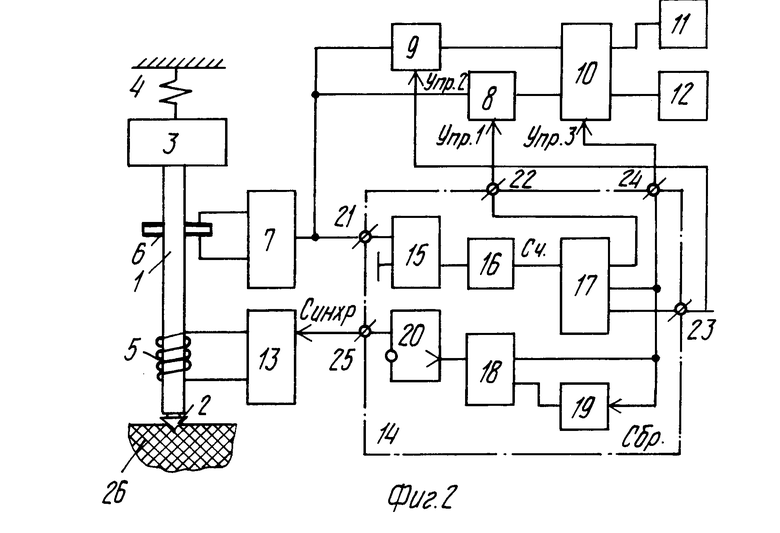
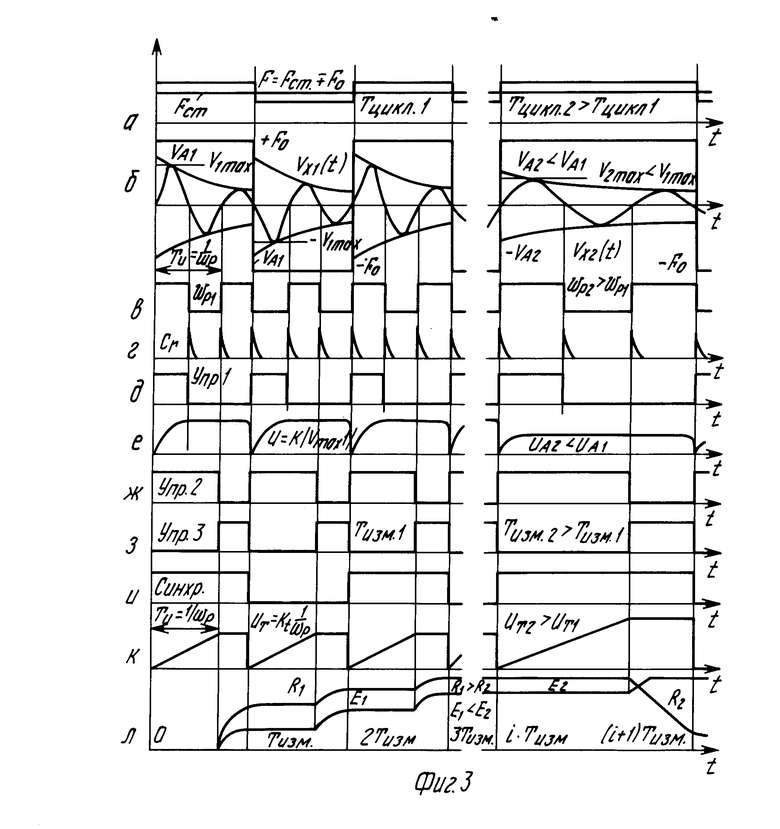
На фиг.2 приведена блок-схема предлагаемого устройства; на фиг.3 временные диаграммы его работы для случая длительности измерительноного цикла, равной трем полупериодам резонансной частоты затухающего колебательного процесса.
Устройство содержит магнитострикционный стержень 1 с жестко закрепленными на нем индентором 2 и инерциальной массой 3 с пружинной 4, взаимодействующей со стержнем 1. Катушка возбуждения 5 стержня 1 осуществляет воздействие на стержень 1 тестовой силой ±Fо, а колебательная скорость известного электроакустического преобразователя твердости преобразуется в пропорциональный электрический сигнал датчиком 6 этой скорости, жестко закрепленным на стержне 1, например пьезоэлектрическим датчиком. Полученный таким образом электрический сигнал, пропорциональный колебательной скорости преобразователя, усиливают по напряжению усилителем 7 и параллельно через амплитудный детектор 8 и преобразователь частоты 9 подают соответственно на первый и второй входы вычислительного блока 10. С первого и второго выхода этого блока 10 результаты измерения поступают соответственно на первый 12 и второй 11 индикаторы. Импульсный генератор 13 по схеме знакопеременного синхронизируемого генератора постоянного по модулю тока осуществляет возбуждение процесса электроакустического преобразователя посредством катушки возбуждения 5. Работа генератора 13 синхронизируется с выхода синхронизации блока управления 14, вход которого соединен с выходом усилителя напряжения 7, а первый, второй и третий выходы подключены к входам управления соответственно амплитудного детектора 8, преобразователя частоты 9 и вычислительного блока 10.
Блок управления 14 содержит последовательно соединенные с его выходов компаратор нуля 15, формирователь импульсов 16 и счетчик-распределитель импульсов 17, первый выход которого соединен с первым выходом блока 14, второй выход с вторым выходом блока 14, а третий выход соединен с третьим выходом блока 14, первым входом схемы ИЛИ 18 и входом сброса автогенераторного режима мультивибратора 19, выход которого подключен к второму входу схемы ИЛИ 18, выход которой соединен со счетным входом триггера 20, неинверсирующий выход которого подключен к выходу синхронизации блока управления 14.
Кроме того, устройство содержит вход 21 блока управления 14, выходы соответственно первый 22, второй 23, третий 24 и синхронизации 25, контролируемый материал 26.
Устройство работает следующим образом.
Индентор 2 внедряют в материал 26 под воздействием статической нагрузки силой Fст, на фоне которой действует знакопеременная тестовая импульсная сила ±Fо, возбуждаемая катушкой 5 электроакустического преобразователя (фиг. 3а). В преобразователе при этом возбуждаются затухающие колебания, функция скорости которых описывается (4) (фиг.3б). Напряжение, пропорциональное этой скорости, в виде электрического сигнала снимают с датчика 6 и подают в схему устройства с выхода усилителя 7.
Это напряжение поступает в блок управления 14, где на выходе компаратора 15 получают функцию временной импульсной последовательности, определяемую полярностью входного напряжения и частотой ее следования ωр(фиг.3в). При этом импульсы с выходам формирователя 16 оказываются синхронными во времени с каждым моментом прохождения информационного сигнала Vx(t) через ноль, т.е. образуют импульсную последовательность с частотой, пропорциональной резонансной ωp и совпадающую с ней по фазе (фиг.3г). На первом выходе счетчика-распределителя 17 образуется при этом сигнал логической единицы в каждый первый такт из трех последовательных входных тактов, синхронных с полупериодами информационного сигнала Vx(t) (фиг.3д).
По этому сигналу "Упр.1", совпадающему с первым полупериодом колебательной скорости, амплитуда которой является максимальной по модулю из всех локальных экстремумов затухающего процесса, разрешается запись в память амплитудного детектора 8 текущего значения аргумента Vмакс системы уравнений преобразования (20). Эпюра модуля напряжения на выходе детектора 8, пропорциональная Vмакс, приведена на фиг.3е.
Одновременно с этим на втором выходе счетчика 17 формируется импульс управления "Упр. 2" для преобразователя частоты 9, равный по длительности целому периоду резонансной частоты (двум полупериодам для случая длительности измерительного цикла, равной трем полупериодам) (фиг.3ж). Таким образом, преобразователь частоты 9 открыт для измерения в течение целого периода резонансной частоты ωр и на его выходе формируется напряжение, обратно пропорциональное второму аргументу системы уравнений преобразования (20).
Последний такт каждой входной трехтактной импульсной последовательно, равный по длительности последнему третьему полупериоду резонансной частоты в каждом из измерительных циклов, зарезервирован для работы вычислительного блока 10 по алгоритму (20).
Его управление осуществляется с третьего выхода счетчика 17 сигналом "Упр. 3" (фиг.3). По отрицательному фронту этого сигнала тактируется счетный триггер 20, синхронизирующий работу генератора импульсов. В результате переключения триггера 20 в электроакустическом преобразователе твердости активируется следующий измерительный цикл тестовым воздействием противоположного знака (фиг.3и, 3а и 3б). При этом разбиение измерительного цикла устройства на три (или любое целое нечетное число) полупериодов резонансной частоты, обеспечивает сохранение тенденции развития и фазы непрерывного измерительного процесса на границах соседних измерительных циклов.
В случае сбоя блока управления 14 с автоматического режима формирования измерительных циклов устройство запустится от страхового мультивбиратора 19. В нормальном режиме его автогенерация заблокирована импульсами "Сброс" (фиг. 2).
На выходе преобразователя частоты 9 имеем напряжение, обратно пропорциональное текущему значению резонансной частоты ωр (фиг.3к). Преобразователь 9 может быть выполнен, например, по схеме преобразователя интервала времени в напряжение, обратно пропорциональное измеряемой частоте. Обратную зависимость этого аргумента системы уравнений преобразования (20) можно реализовать при этом в вычислительном блоке 10. Результаты преобразования контролируемых параметров механического импеданса на основании (20) поступают на индикаторы, соответственно твердость на индикатор 12 и модуль упругости на индикатор 11.
Реализация счетчика-распределителя 17 импульсов для случая длительности цикла измерения, равной любому целому нечетному числу больше трех полупериодов резонансной частоты, не представляет принципиальной сложности. Этот вариант устройства может оказаться полезным в ряде практических случаев, когда быстродействие измерения не является доминирующим фактором контроля физико-механических свойств материалов.
Изобретательский уровень предлагаемого устройства для реализации предлагаемого способа заключается во вновь введенных блоках преобразователь частоты, блок управления и второй индикатор с новыми цепями управления и синхронизации и дополнительными оригинальными связями, что обеспечило получение новых свойств предлагаемого устройства.
Во-первых, это высокая точность измерения твердости и модуля упругости контролируемых материалов за счет инвариантности уравнения преобразования (20) к артефактам и паразитным параметрам измерения во всем диапазоне импедансометрии. Положительным новым свойством, способствующим повышению точности за счет снижения инструметальной погрешности измерения, являются также постоянство модуля тестовой силы Fо за все время измерения, фазовая синхронизации момента его приложения и независимость алгоритма преобразования (20) от девиации массы колебательной системы за счет вовлечения в колебательный процесс конечных объемов контактной зоны контролируемых изделий. Все это проявляется как положительный эффект предлагаемого изобретения.
Во-вторых, новым свойством устройства является возможность измерения модуля упругости материалов, что расширяет его применяемость для контроля изделий с заранее неизвестными физико-механическими свойствами или для технической диагностики остаточного ресурса деталей в процессе их эксплуатации в сложных термомеханических условиях.
В-третьих, предлагаемое устройство твердомера обеспечивает беспрецедентно высокое быстродействие за счет организации алгоритма (20) на основании аргументов, определяемых в начальной фазе переходного затухающего процесса в системе электроакустического преобразователя. Это обеспечивает применяемость способа и устройства для организации метрологического контроллера физико-механических свойств изделий в составе поточных технологических линий по их изготовлению (механической обработке), например, при многоцикловом шлифовании роликов и колец подшипников, где требуется высокая оперативность организации контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ТВЕРДОСТИ МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2042943C1 |
| ТВЕРДОМЕР | 1992 |
|
RU2045024C1 |
| ЭЛЕКТРОАКУСТИЧЕСКИЙ ТВЕРДОМЕР | 1992 |
|
RU2042942C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОБРАЗЦА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2044298C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТВЕРДОСТИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2047157C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК МАТЕРИАЛА ДВИЖУЩЕГОСЯ ЛИСТОВОГО ПРОКАТА | 2003 |
|
RU2234081C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ СЛЕПЫХ | 1993 |
|
RU2049455C1 |
| СПОСОБ ОБНАРУЖЕНИЯ СКВОЗНЫХ ДЕФЕКТОВ В СТЕНКАХ ЕМКОСТЕЙ, ЗАПОЛНЕННЫХ ЖИДКОСТЬЮ | 2000 |
|
RU2199735C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| СКВАЖИННОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕМПЕРАТУРЫ ПОГРУЖНОГО ЭЛЕКТРОДВИГАТЕЛЯ И ДАВЛЕНИЯ НА ПРИЕМЕ НАСОСА | 1995 |
|
RU2099522C1 |
Изобретение относится к контролю твердости материала и может применяться при контроле деталей машин. При этом на материал воздействуют индентором, взаимодействующим с возбудителем акустических колебаний, по параметрам которых определяют твердость материала. Устройство для осуществления способа выполнено по схеме электронной логики с использованием счетчиков-распределителей колебаний индентора, жестко связанного с магнитостриктором. 2 с. и 6 з. п. ф-лы, 3 ил.

где Rх контролируемая твердость материала, кг/с;
Eх контролируемый модуль упругости материала, кг/с;
M масса колебательной системы, кг;
ωр угловая резонансная частота затухающих колебаний, с-1;
F0 модуль силы тестового воздействия, кг · м/с2;
Vмах модуль максимальной амплитуды колебательной скорости индектора, м/с.
| Авторское свидетельство СССР N 980378, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
