Предлагаемое изобретение относится к области точного приборостроения и может быть использовано в составе навигационных комплексов.
Рассматривается корабельная навигационная система, построенная на двух электростатических гироскопах (ЭСГ) с карданным съемом информации об угловом положении векторов кинетического момента (ВКМ) роторов ЭСГ относительно объекта (корабля). Обычно в навигационной системе, построенной на ЭСГ, начальное направление ВКМ устанавливается следующим: одного - по оси Мира (полярный ЭСГ), второго - в плоскости Земного экватора (экваториальный ЭСГ) (см. В.З.Гусинский и др. «Использование информационной избыточности в инерциальных навигационных системах на свободных гироскопах». Сб. докладов на III Санкт-Петербургской конференции по интегрированным навигационным системам, 1996 г.)
С целью уменьшения ошибок определения навигационных параметров ВКМ ротора полярного ЭСГ необходимо ориентировать таким образом, чтобы в системе координат, связанных с Землей, его видимое движение было минимальным (выставлять в равновесное положение положение, при котором движение ВКМ ротора в абсолютной системе координат, вызванное уводящими моментами, и переносное движение ЭСГ за счет вращения Земли были равны друг другу и противоположны по направлению).
Для математического обоснования необходимости минимизации видимого движения ВКМ ротора полярного ЭСГ рассмотрим движение ВКМ ротора ЭСГ от действия на ротор корпусного момента и момента от осевого дисбаланса ротора.
Введем правую систему координат 0ξηζ, связанную с Землей с центром в центре камеры чувствительного элемента гироскопа. Ось 0ζ направлена по оси вращения Земли, ось 0ξ - в плоскости Земного меридиана, правую систему координат 0XYZ, связанную с ротором гироскопа, но не участвующую в его вращении (оси Резаля). Ось 0Z направим по оси вращения ротора, ось 0Х в начальный момент направлена по оси 0ξ. Оси 0XYZ развернем на малые углы γ и β (фиг.1).
Вектор уводящего корпусного момента Мк расположен в плоскости 0XY. Обозначим его проекции на оси 0Х и 0Y Мкх и Мку соответственно (фиг.1). Вектор уводящего момента MG от осевого дисбаланса ротора (в рассматриваемом случае учитывается момент от силы тяжести, т.к. ускорение силы тяжести на порядок больше других ускорений, действующих на объект (корабль)). Вектор MG перпендикулярен плоскости меридиана, в котором расположена сила тяжести, действующая на ротор (фиг.1). ВКМ ротора, Н, направлен по оси 0Z; скорость вращения Земли, Ω, - по оси 0ζ (фиг.1).
Прецессионные уравнения движения ВКМ ротора гироскопа в системе 0ξηζ с учетом малости углов γ и β согласно фиг.1 имеют вид:
где m0, n0 и n1 - коэффициенты модели ухода (КМУ);  ,
,  ,
, 
Решение системы уравнений (1) имеет вид

где β0 и γ0 - значения β и γ при t=0.
Зная значения β0, γ0, n0, m0 и n1 при ϕ=ϕ0 (ϕ0 - широта места), можно определять из (1) или (2) текущее положение ВКМ ротора полярного гироскопа.
Определение величин КМУ производится известными методами при работе гироскопа в составе гиросистемы (калибровка системы). Время работы гиросистемы для определения КМУ не менее суток при постоянной или маломеняющейся широте места.
Как видно из уравнений (1) и (2), в этом случае невозможно разделить параметры n0 и n1. Поэтому в математическую модель, решающую систему (1), вводится коэффициент

определяемый при калибровке системы.
Тогда расчетная система уравнений (1) при ϕ=ϕ0 примет вид:

где βp, γP - расчетные координаты ВКМ ротора.
Из (4)

Разница истинных и расчетных значений координат ВКМ ротора (ошибка определения координат из-за невозможности разделения коэффициентов n0, n1) получается вычитанием (5) из (2) при допущении, что


Как видно из (7), Δβ и Δγ линейно зависят от времени и приводят при эксплуатации гироскопа к недопустимым погрешностям.
Если известно положение ВКМ полярного гироскопа, при котором его видимое движение отсутствует - равновесное положение (положение, при котором движение ВКМ ротора в абсолютной системе координат, вызванное уводящими моментами, и переносное движение гироскопа за счет вращения Земли равны друг другу и противоположны по направлению), то при этом положении ВКМ ротора ошибки Δβ=Δγ=0.
Действительно, из (2), с учетом (6) при



Известен способ ориентации ВКМ ротора ЭСГ, применяемый для определения погрешностей ЭСГ. (Патент РФ №2193162). ЭСГ содержит демпфирующую катушку, используемую для гашения нутационных колебаний ротора и приведения оси вращения ротора в заданное направление. Магнитная ось катушки направлена по оси симметрии корпуса гироскопа. В состав гироскопа входит двухкоординатный оптический датчик, ось чувствительности которого направлена по оси симметрии корпуса гироскопа. Способ включает установку ЭСГ в гиростабилизатор, управляемый оптико-электронными следящими системами от сигналов датчика угла ЭСГ, выведение ЭСГ и гиростабилизатора в рабочий режим, определение равновесного положения ВКМ ротора, выключение следящих систем гиростабилизатора, разворот колец гиростабилизатора таким образом, чтобы ось корпуса ЭСГ была ориентирована в направлении равновесного положения ВКМ ротора, включение демпфирующей катушки на время, достаточное для приведения ВКМ ротора в соосное положение с осью корпуса, выключение демпфирующей катушки, включение следящих систем гиростабилизатора. Данный способ принимается за прототип.
Однако способ, описанный в прототипе, не применим для использования на движущемся объекте (корабле), т.к. требует выключения следящих систем, управляемых карданными кольцами гиростабилизатора, что при качке и изменении курса приводит в общем случае к неоднозначности взаимного положения осей ротора и демпфирующей катушки и, как следствие, к ошибке ориентации ВКМ ротора полярного ЭСГ.
Задачей изобретения является повышение точности ориентации полярного ЭСГ корабельной навигационной системы. Поставленная задача решается тем, что ориентация полярного ЭСГ корабельной навигационной системы проводится без выключения оптико-электронных следящих систем карданного подвеса навигационной системы и введением в оптико-электронную следящую систему одной из координат смещения нуля. При включенных следящих системах рассогласование между осью демпфирующей катушки и ВКМ ротора гироскопа не зависит от амплитуды углов качки и изменения курса, тогда как при выключенных следящих системах качка корабля будет изменять с периодом качки взаимное положение ВКМ ротора гироскопа и оси демпфирующей катушки, что при амплитудах углов качки, превышающих углы разворота карданных колец согласно требованиям прототипа, не даст возможности проведения ориентации ВКМ гироскопа.
Смещение нуля следящей системы позволяет рассогласовать ось демпфирующей катушки с ВКМ ротора без разворота карданных колец.
ЭСГ корабельной навигационной системы содержит демпфирующую нутационные колебания ротора ЭСГ и приводящую к оси симметрии корпуса ЭСГ катушку. Корпус ЭСГ установлен в систему автокомпенсации с осью, совпадающей с осью корпуса ЭСГ. ЭСГ с системой автокомпенсации установлен в двухосный карданный подвес. Кольца гироориентатора управляются от сигналов двухкоординатной оптико-электронной системы слежения за угловым положением оси ротора гироскопа. Ось ротора при выходе на рабочий режим гироскопа ориентирована близко к направлению оси Мира.
Последовательность операций предлагаемого способа ориентации полярного гироскопа:
- приведение гироориентатора в рабочий режим;
- определение направления оси симметрии корпуса гироскопа, при котором видимое движение этой оси в системе координат, связанной с Землей, минимально и характеризуется углами α и β, где α и β - углы в ортогональной системе координат, связанных с Землей, отсчитываемые в плоскости, перпендикулярной оси Мира, при установке оси корпуса на которые видимое движение оси корпуса минимально. Угол α лежит в плоскости Земного меридиана;
- введение в оптико-электронную систему одной из координат смещение нуля на угол, близкий к середине линейного участка измерения угла рассогласования между осью симметрии корпуса гироскопа и нулем следящей системы;
- выключение системы автокомпенсации при достижении угла поворота корпуса гироскопа равного  , где γ - угол, отсчитываемый от плоскости Земного меридиана до плоскости, включающей ось корпуса и ось координаты, в следящую систему которой введен сигнал смещения нуля;
, где γ - угол, отсчитываемый от плоскости Земного меридиана до плоскости, включающей ось корпуса и ось координаты, в следящую систему которой введен сигнал смещения нуля;
- включение демпфирующей катушки после разворота корпуса на угол γ;
- наблюдение за движением оси корпуса;
- выключение демпфирующей катушки при достижении углов поворота корпуса значений α и β;
- включение системы автокомпенсации;
- выведение смещения нуля в оптико-электронной следящей системе.
В результате проведенных операций направление ВКМ ротора полярного гироскопа близко к равновесному положению.
На предприятии данный способ осуществлен в гироориентаторе инерциальной корабельной системы следующим образом.
После приведения гироориентатора в рабочий режим, при котором ВКМ ротора полярного гироскопа ориентируется параллельно оси Мира, в течение 1-2 суток фиксируется движение ВКМ ротора в Земной системе координат. По результатам движения определяется равновесное положение ВКМ ротора как центр круга, описанного ВКМ (углы α и β). Центр круга характеризуется в Земной системе координат углами α и β, причем угол α лежит в плоскости Земного меридиана. Затем, не выключая следящих систем, управляющих кольцами карданного подвеса гироориентатора, в оптико-электронную систему, управляющую координатой α, вводится смещение нуля на угол, близкий к середине линейного участка измерения угла рассогласования между осью симметрии корпуса гироскопа и нулем данной следящей системы.
Следующая операция - выключение системы автокомпенсации при достижении угла поворота корпуса гироскопа равного  , причем угол γ отсчитывается от плоскости Земного меридиана, далее включается демпфирующая катушка и наблюдается с помощью датчиков углов поворота карданных колец за движением корпуса гироскопа.
, причем угол γ отсчитывается от плоскости Земного меридиана, далее включается демпфирующая катушка и наблюдается с помощью датчиков углов поворота карданных колец за движением корпуса гироскопа.
При достижении углов поворота корпуса значений α и β демпфирующая катушка выключается и включается система автокомпенсации.
Реализация этого способа позволит повысить точность корабельной инерциальной системы на ЭСГ.
Технико-экономическая эффективность изобретения заключается в повышении точности корабельной инерциальной системы.
В связи с отсутствием сведений о потребностях страны в количестве инерциальных систем экономический эффект изобретения подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ПРОГРАММНОГО ДВИЖЕНИЯ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2386106C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2008 |
|
RU2386109C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2296298C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2004 |
|
RU2269745C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ГЛОБАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И ПРИБОР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2306528C2 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
Изобретение относится к области точного приборостроения и может быть использовано в составе навигационных комплексов. Ориентируют ротор полярного электростатического гироскопа корабельной навигационной системы в положение, когда его видимое движение минимально, т.е. движение ротора в абсолютной системе координат, вызванное уводящими моментами, и переносное движение за счет вращения Земли были равны и противоположны по знаку. Такая ориентация ротора полярного гироскопа повышает точность выработки навигационных параметров навигационной системы, построенной на электростатических гироскопах. 1 ил.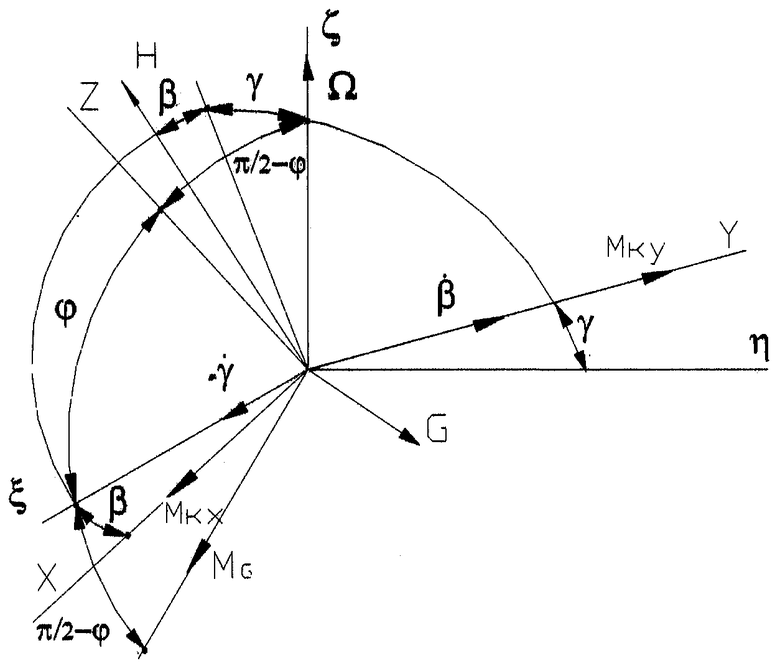
Способ ориентации полярного электростатического гироскопа (ЭСГ) корабельной навигационной системы, содержащей два ЭСГ с демпфирующей нутационные колебания катушкой в каждом гироскопе с магнитной осью, направленной по оси симметрии корпуса гироскопа, при этом корпус гироскопа установлен в узел автокомпенсации с осью, направленной по оси симметрии корпуса гироскопа, каждый гироскоп установлен в двухосный гироориентатор, кольца которого управляются от сигналов двухкоординатной оптико-электронной системы слежения за угловым положением оси ротора, ось ротора полярного гироскопа при его запуске ориентирована близко к направлению оси Мира, заключающийся в определении направления оси симметрии корпуса полярного гироскопа, при котором видимое движение этой оси в системе координат, связанной с Землей, минимально, приведении навигационной системы в рабочий режим, отличающийся тем, что в оптико-электронную следящую систему одной из координат вводится смещение нуля на угол, близкий к середине линейного участка измерения угла рассогласования между осью симметрии корпуса гироскопа и нулем следящей системы, выключается автокомпенсация при достижении угла поворота корпуса гироскопа равного
 ,
,
где α и β - углы в ортогональной системе координат, связанных с Землей, отсчитываемых в плоскости, перпендикулярной оси Мира, угол α лежит в плоскости Земного меридиана, при установке оси корпуса на которые видимое движение оси корпуса минимально, причем угол γ отсчитывается от плоскости Земного меридиана до плоскости, включающей ось корпуса и ось координаты, в следящую систему которой введен сигнал смещения нуля, включается демпфирующая катушка, ведется наблюдение за движением оси корпуса, выключается демпфирующая катушка при достижении углов поворота корпуса значений α и β, включается система автокомпенсации, выводится смещение нуля в оптико-электронную следящую систему.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| СПОСОБ ПРИВЕДЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА (ЭСГ) В РАБОЧИЙ РЕЖИМ | 2001 |
|
RU2187787C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ВЕКТОРА КИНЕТИЧЕСКОГО МОМЕНТА НЕКОНТАКТНОГО ГИРОСКОПА | 1993 |
|
RU2065134C1 |
| US 4654582 А, 31.03.1987. | |||

