Изобретение относится к области почтовой связи, складского хозяйства и может быть использовано при автоматизации выгрузки грузов, по форме близких к параллелепипеду, примерно одинаковой высоты, например, посылок, ящиков с письменной корреспонденцией и др. из контейнеров.
Известно устройство автоматической разгрузки контейнеров, описанное в [Барсук И.В., Гиль Г.К., Воскресенский А.Л. и др. Организация автоматизированной обработки почтовых отправлений в крупных узлах связи. - М.: Радио и связь, 1985. - 208 с.], в котором ввод контейнеров в разгрузочное устройство и вывод порожних контейнеров осуществляются наклонными участками трассы буксировочного конвейера. В разгрузочном устройстве контейнер автоматически наклоняется, и посылки выгружаются на приемный склиз, с которого поступают на отводящий транспортер. После опорожнения контейнер возвращается в вертикальное положение, транспортируется вниз на уровень пола и продолжает движение по трассе буксировочного конвейера. Из-за того, что выгрузка посылок осуществляется «навалом», не гарантируются целостность перевязей и оболочки посылок, сохранность вложения, а также не обеспечивается упорядоченность потока и разделение посылок, что требует при автоматизации последующей обработки посылок (опознавание, сортировка) включения в линию дополнительного устройства разделения посылок.
Известно устройство SU 1111963, 1986 для разгрузки контейнера, использующее гибкую транспортерную ленту, которую при послойной загрузке контейнера петлями прокладывают между слоями грузов. При разгрузке контейнера по мере вытягивания этой ленты грузы упорядоченно по слоям выходят из контейнера на ленте. Использование устройства ограничено из-за уменьшения полезного объема контейнера за счет двойной толщины ленты между слоями грузов и зазоров между стенками кузова и слоями грузов, определяемых радиусом изгиба ленты. К тому же для автоматизации последующей обработки грузов (опознавание, сортировка) после устройства разгрузки контейнера требуется включение в линию устройства разделения грузов по одному.
Известно устройство SU 1239067, 1986 для разгрузки контейнера, использующее размещенные внутри кузова контейнера шарнирно соединенные дно и боковую стенку, которые при выгрузке грузов, поднимаясь вверх и поворачиваясь вокруг оси, в крайнем верхнем положении образуют общую плоскость, располагающуюся по диагонали кузова. По мере поворота дна грузы под собственным весом перемещаются в сторону бокового окна, образуемого распашными дверцами или откидной стенкой, и далее на отводящий транспортер. Использование устройства ограничивают необходимость вручную выгружать верхний слой грузов при полном (или почти полном) заполнении кузова контейнера или иметь открывающуюся верхнюю крышку кузова, что ослабляет жесткость конструкции контейнера, а также потребность во включении в линию устройства разделения грузов по одному для автоматизации обработки грузов на последующих этапах (опознавание, сортировка).
Известны устройства для послойного отделения грузов, находящихся в штабеле, контейнере, на паллете, и их перекладки на транспортер, в штабель, паллету, в которых используются в различных комбинациях приводные ремни (US 5265712, 1993), приводные ремни и ролики с шероховатой поверхностью (US 5238350, 1993), клиновидная плоскость, ролики с шероховатой поверхностью и приводные ремни (US 5538391, 1996). Однако применение этих устройств для выгрузки, например, почтовых грузов из контейнера невозможно, так как велика вероятность повреждения упаковки грузов (перевязи, печатей и т.п.).
Известно робототехническое устройство US 5102292, 1992 для перегрузки плоских предметов одинаковых размеров из паллеты на отводящий транспортер, в котором рабочие органы имеют возможность перемещения в трех взаимно перпендикулярных плоскостях, а захватная головка поворачивается вокруг вертикальной оси. Ограничениями на применение этого устройства являются необходимость наличия у контейнера открывающейся верхней крышки или необходимость дооборудования устройства механизмом приведения контейнера с грузами в горизонтальное положение открытыми дверцами вверх и возвращения порожнего контейнера в исходное состояние.
Известно захватывающее устройство US 6652014, 2003, реализующее вакуумную систему для захватывания, по крайней мере, одного объекта, которая имеет базовый блок и, по крайней мере, два присасывающих элемента, которые порознь соединены с базовым блоком. Эта система, представляющая несомненныый интерес с точки зрения работы вакуумного захвата, не охватывает работу системы в целом.
Наиболее близким аналогом (прототипом) предлагаемого изобретения представляется устройство для разгрузки пакетов поддонов из передвижного контенера US №5007785, 1991. Это устройство содержит: (1) контейнер, (2) разгрузочное устройство для выгрузки пакетов из указанного контейнера, (3) устройство перемещения разгрузочного устройства и (4) устройство управления для управления устройством перемещения. При этом разгружающее устройство способно двигаться следующим образом:
(a) вертикально рядом с указанным контейнером;
(b) горизонтально вперед;
(c) вертикально так, чтобы слегка приподнять пачку над полкой;
(d) вбок так, чтобы отсоединить пачку от соседних; и
(е) горизонтально назад так, чтобы удалить пачку из контейнера.
Недостаток прототипа заключен в том, что при использовании этой системы для выгрузки грузов из контейнера на отводящий транспортер разгрузочное устройство должно совершать излишние холостые движения, что снижает производительность системы.
Задачей, на решение которой направлено изобретение, является повышение производительности устройства выгрузки штучных грузов из контейнера на отводящий транспортер при обеспечении гарантированного интервала между выгружаемыми грузами.
Решение указанной задачи достигается применением устройства выгрузки, состоящего из станины, разгрузочного робота-манипулятора, системы управления, отводящего транспортера, и места установки контейнера для разгрузки. (Далее следуют отличительные признаки предлагаемого устройства). Станина выполнена в виде конструкции с двумя (правой и левой) вертикально направленными частями (стойками) и замыкающей их горизонтальной частью, причем к вертикальным частям с внутренних сторон неподвижно крепятся симметрично друг другу, соответственно, правый и левый винтовые спуски, нижние кромки спусков расположены над бортовыми ограждениями отводящего транспортера, разгрузочный робот-манипулятор закреплен на горизонтальной части станины, плоскость симметрии отводящего транспортера перпендикулярна плоскости станины, в которой лежат вертикальные и горизонтальная ее части, причем на спусках имеется отбортовка для предотвращения смещения груза за их габариты, а ширина спусков больше наибольшей диагонали сторон груза с максимально допустимыми размерами.
Кроме того, разгрузочный робот-манипулятор может быть выполнен по кинематической схеме, включающей вертикально расположенную стойку, шесть подвижных звеньев, образующих с шарнирами шесть низших кинематических пар, причем оси шарниров каждого из двух соседних звеньев взаимно перпендикулярны, к концу шестого подвижного звена прикреплен вакуумный захват. Каждое подвижное звено соединено с соответствующим сервоприводом, в качестве которых могут быть применены шаговые электродвигатели (напрмер, это могут быть сервоприводы ЕХ-106+ фирмы Trossen Robotics, США). Захват соединен с источником вакуума (это может быть, например, газоструйный эжектор, работающий от цеховой сети сжатого воздуха).
Кроме того, устройство может содержать систему управления, содержащую управляющий микроконтроллер (это может быть, например, микроконтроллер AVR фирмы Atmel, США) с микропроцессором, системным контроллером, оперативным запоминающим устройством (ОЗУ), постоянным запоминающим устройством (ПЗУ), модулем ввода-вывода, и устройство связи с объектом (УСО), причем микропроцессор соединен с ОЗУ, ПЗУ и системным контроллером, системный контроллер соединен, кроме того, шинами данных и управления с ОЗУ и ПЗУ и через интерфейсы ввода и вывода модуля ввода-вывода с УСО, а УСО через соответствующие каналы ввода-вывода соединено со средством определения положения груза в контейнере, средствами передачи и приема сигналов оператору и от него, средством управления сервоприводами узлов руки робота и средством определения положения руки робота (термин «рука» используется при описании андроидных роботов-манипуляторов; в данном изобретении этот термин охватывает подвижные звенья робота-манипулятора и вакуумный захват), средством управления вакуумным захватом, средством определения веса груза, средством определения габарита груза, а указанное средство передачи и приема сигналов оператору и от него соединено, кроме того, со средством управления отводящим транспортером.
Кроме того, указанное средство определения положения груза в контейнере может являться лазерным сканером.
Кроме того, указанное средство определения положения груза в контейнере может являться механическим сканером.
Предлагаемое устройство выгрузки штучных грузов из контейнера поясняется следующими фигурами:
На фиг.1 показано устройство выгрузки штучных грузов из контейнера (вид спереди).
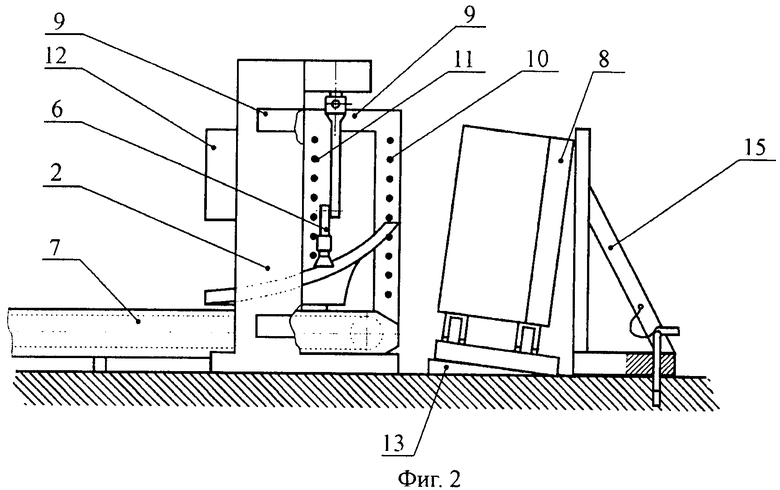
На фиг.2 показано устройство выгрузки штучных грузов из контейнера (вид сбоку).
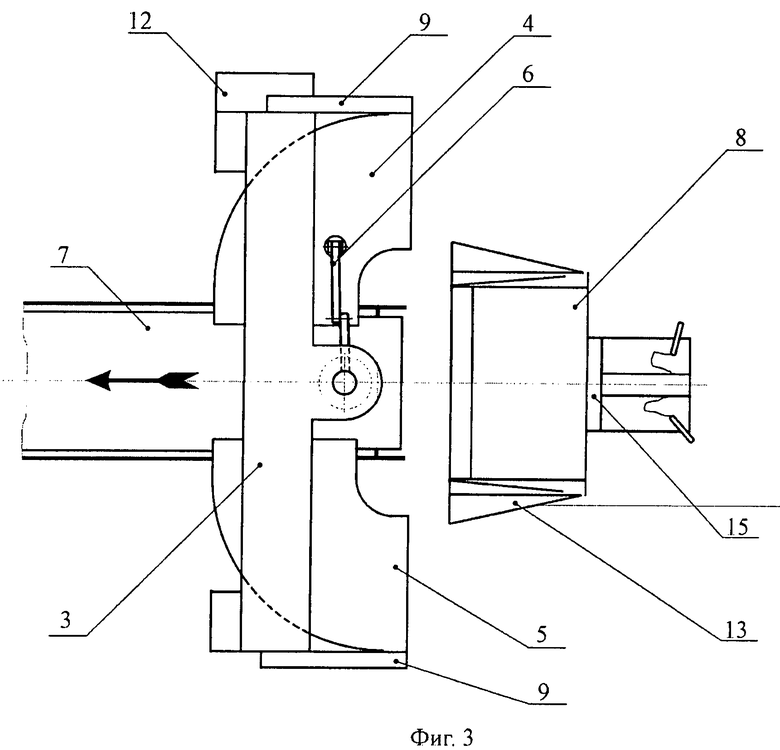
На фиг.3 показано устройство выгрузки штучных грузов из контейнера (вид сверху).
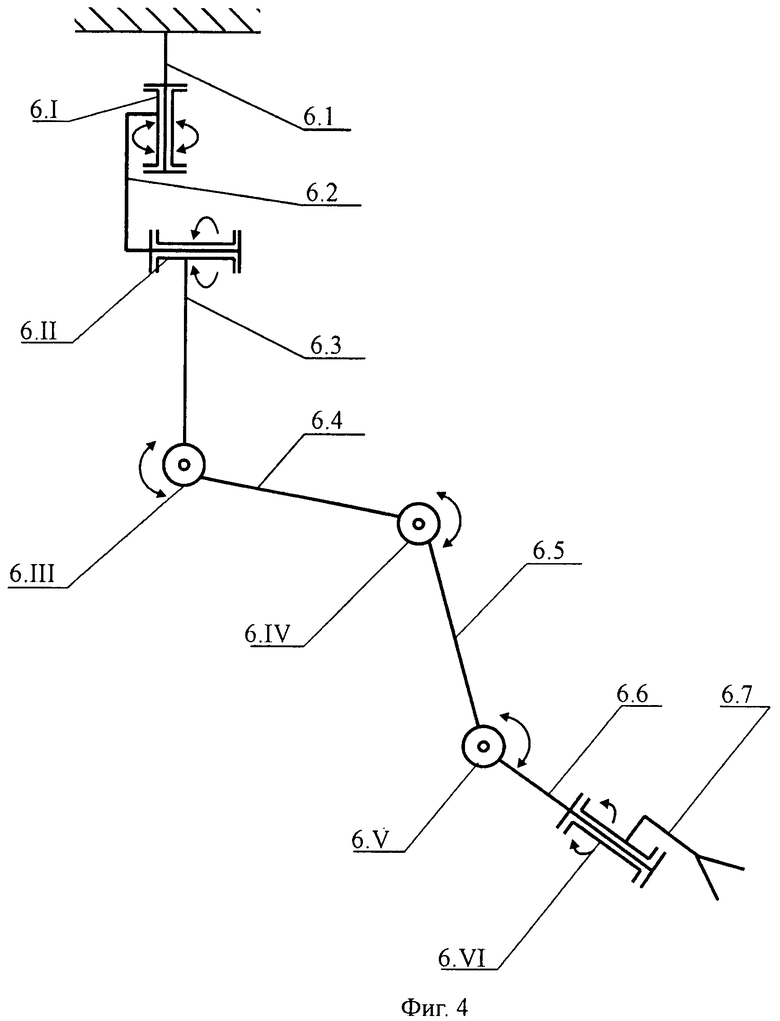
На фиг.4 показана кинематическая схема руки робота-манипулятора.
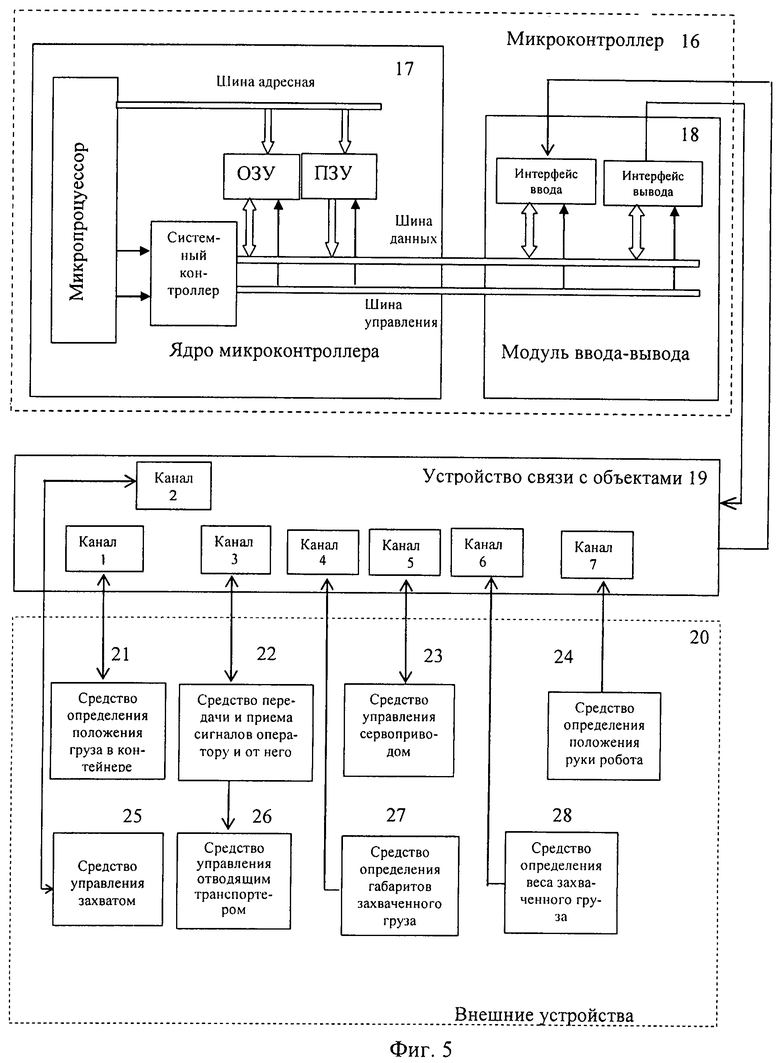
На фиг.5 показана блок-схема управления устройства выгрузки штучных грузов из контейнера.
На фиг.6 показана фронтальная проекция открытой стороны контейнера с зонами выгрузки грузов в режиме S (с максимальной производительностью).
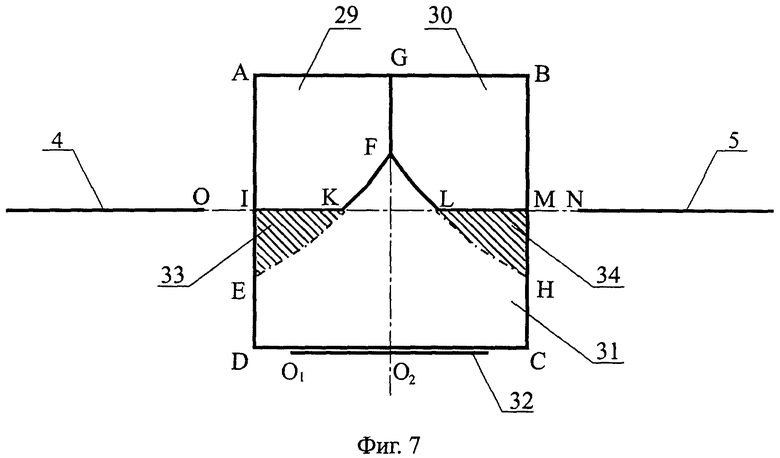
На фиг.7 показана фронтальная проекция открытой стороны контейнера с зонами выгрузки грузов в режиме Е (с максимальной экономией энергозатрат).
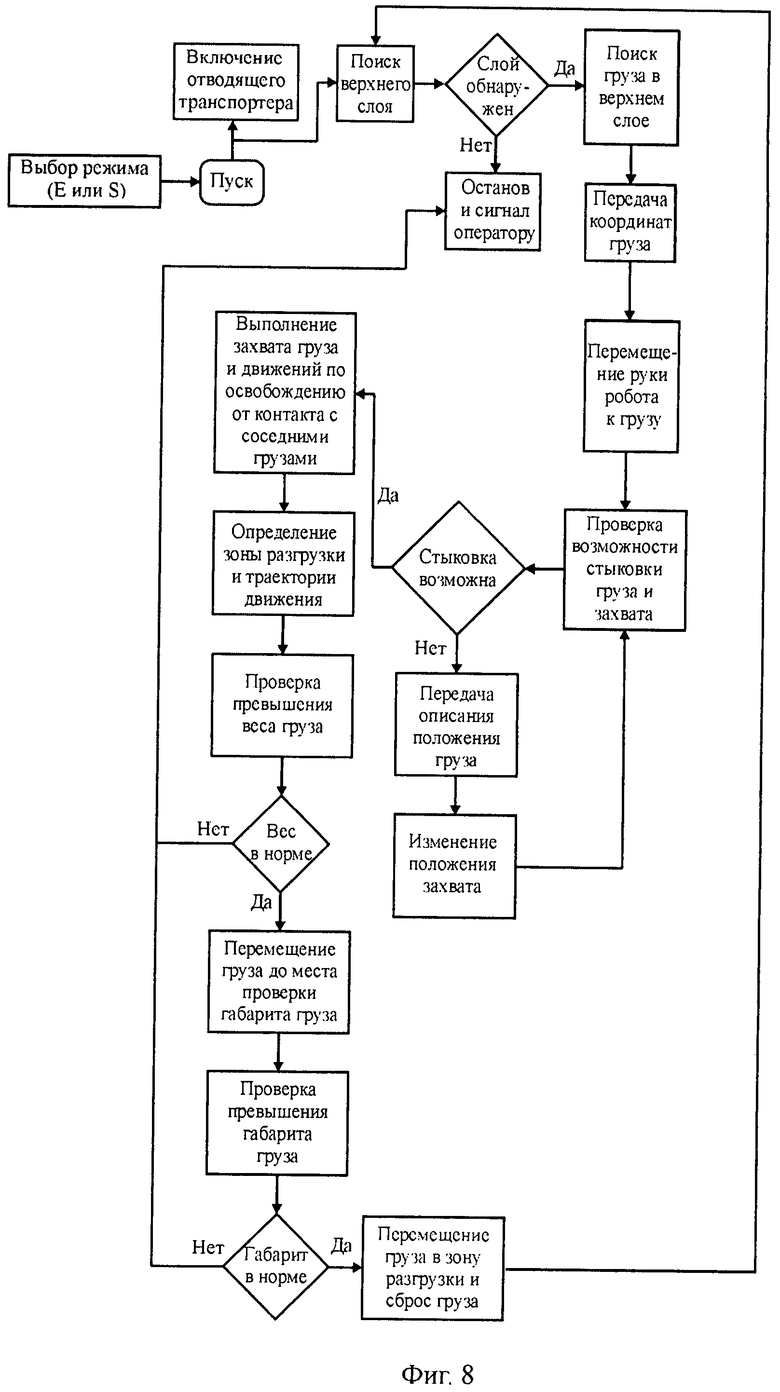
На фиг.8 показан алгоритм работы устройства выгрузки штучных грузов из контейнера.
Перечень принятых обозначений
1 - вертикально направленная часть станины (левая);
2 - вертикально направленная часть станины (правая);
3 - горизонтальная часть станины;
4 - левый винтовой спуск;
5 - правый винтовой спуск;
6 - робот-манипулятор;
7 - отводящий транспортер;
8 - контейнер;
9 - рамка для размещения ряда фотодатчиков;
10 - первый ряд фотодатчиков;
11 - второй ряд фотодатчиков;
12 - корпус блока управления;
13 - выступ на напольной части места установки контейнера;
14 - упор для предотвращения бокового смещения контейнера;
15 - упор для предотвращения опрокидывания контейнера;
16 - управляющий микроконтроллер;
17 - ядро микроконтроллера;
18 - модуль ввода-вывода;
19 - устройство связи с объектами (УСО);
20 - внешние объекты;
21 - средство определения положения груза в контейнере;
22 - средства передачи и приема сигналов оператору и от него;
23 - средство управления сервоприводом;
24 - средство определения положения руки робота;
25 - средство управления вакуумным захватом;
26 - средство управления отводящим транспортером;
27 - средство определения габаритов захваченного груза;
28 - средство определения веса захваченного груза;
29 - зона выгрузки на левый спуск;
30 - зона выгрузки на правый спуск;
31 - зона выгрузки на ленту транспортера;
32 - лента транспортера;
33 - часть зоны выгрузки на левый спуск (29), перешедшая в зону (31);
34 - часть зоны выгрузки на правый спуск (30), перешедшая в зону (31).
На фиг.1, 2 и 3 показаны проекции устройства выгрузки штучных грузов из контейнера. Станина устройства выполнена в виде арочной или п-образной конструкции, имеющей две вертикально направленные части (левую 1 и правую 2) и замыкающую их горизонтальную часть 3. К вертикальным частям с внутренних сторон неподвижно крепятся симметрично друг другу левый 4 и правый 5 винтовые спуски, нижние кромки спусков расположены над бортовыми ограждениями отводящего транспортера 7. Разгрузочный робот-манипулятор 6 закреплен на горизонтальной части станины 3. Предпочтительное место закрепления робота-манипулятора - середина горизонтальной части станины. Плоскость симметрии отводящего транспортера 7 перпендикулярна плоскости станины, в которой лежат вертикальные и горизонтальная ее части. Эта плоскость симметрии проходит, предпочтительно, через середину горизонтальной части станины 3. На спусках 4 и 5 имеется отбортовка для предотвращения смещения груза за их габариты, причем ширина спусков 4 и 5 больше наибольшей диагонали сторон груза с максимально допустимыми размерами для предотвращения образования заторов.
Разгружаемый контейнер 8 имеет открывающиеся на 180° или 270° двери на открытой стороне, он размещается на напольной части места установки для разгрузки контейнера так, что открытая сторона обращена к станине. Напольная часть места установки для разгрузки контейнера имеет выступ 13, который выше уровня напольной части под противоположной стороной контейнера таким образом, чтобы дно контейнера было наклонено на угол 2°-5° к горизонту. Для фиксации контейнера на месте разгрузки имеются два упора 14, размещающихся спереди и сзади от колес установленного для разгрузки контейнера. Они служат для блокировки колес и предотвращения перемещения контейнера в направлениях, параллельных плоскости станины. Кроме того имеется упор 15 для предотвращения смещения или опрокидывания указанного контейнера в направлении, перпендикулярном плоскости станины. Он расположен за противоположной от станины стороной контейнера и прикреплен к полу с помощью штырей, вставляемых через отверстия упора в соответствующие отверстия в полу.
На фиг.1-3 показаны симметрично закрепленные на внешних сторонах вертикальных частей станины рамки 9. Они служат для размещения двух рядов фотодатчиков 10 и 11. Размер рамок по вертикали не менее высоты открытой стороны контейнера, причем ряды 10 и 11 фотодатчиков отстоят друг от друга на расстоянии немного превышающем длину наибольшей диагонали груза с максимально допустимыми размерами. Источники и приемники света размещаются, соответственно, друг напротив друга на противоположных рамках 9, так что пространство между вертикальными частями станины «перекрыто» лучами света.
На фиг.4 показана кинематическая схема руки робота-манипулятора. Робот-манипулятор содержит вертикально расположенную стойку 6.1, шесть подвижных звеньев (6.2-6.6), образующих с шарнирами (6.I-6.VI), соответственно, шесть низших кинематических пар, причем оси шарниров каждого из двух соседних звеньев взаимно перпендикулярны, ось шарнира первого звена 6.I вертикальна, к концу шестого подвижного звена 6.VI прикреплен вакуумный захват 6.7, причем каждое подвижное звено соединено с соответствующим сервоприводом, а захват соединен с источником вакуума (сервоприводы и источник вакуума на схеме не показаны).
На фиг.5 показана блок-схема управления устройства выгрузки. Микроконтроллер 16 содержит ядро микроконтроллера 17 и модуль ввода-вывода 18. Основой ядра является микропроцессор, системный контроллер и, по крайней мере, два блока памяти: оперативная (ОЗУ) и постоянная (ПЗУ). Модуль ввода-вывода содержит интерфейс ввода и интерфейс вывода. Микропроцессор связан с ОЗУ и ПЗУ тремя шинами: адресной, данных и управления. Кроме того, шина данных и шина управления связывают микропроцессор с интерфейсами ввода и вывода. Интерфейсы модуля ввода и вывода соединяются с устройством связи с объектами (УСО) 19. УСО 19 содержит каналы ввода и вывода для связи с внешними устройствами 20.
Внешние устройства могут быть датчиками для определения параметров, необходимых микроконтроллеру для выработки команд управления устройством выгрузки, исполнительными устройствами типа сервоприводов руки робота и пневмонасосов захвата, визуальными и звуковыми средствами сигнализации оператору. Они включают в себя средство определения положения груза в контейнере 21 (оно может быть оптическим или механическим), средство передачи и приема сигналов оператору и от него 22 (оптические и звуковые сигналы), средство управления 23 звеньями руки манипулятора (усилители и сервоприводы), средство определения положения руки робота 24 (оптическое или по сигналам обратной связи от звеньев руки манипулятора), средство управления захватом 25 (пневмоцилиндры или другие устройства для создания вакуума в захвате), средство определения веса груза 28 (тензодатчики разных конструкций), средство определения габаритов захваченного груза 27 (лазерное или с фотодатчиками, описанное выше), средство управления отводящим транспортером 26 (сигналы пуска и останова).
Устройство выгрузки штучных грузов из контейнера работает следующим образом.
Перед выгрузкой грузов контейнер 8 с предварительно открытыми на 180° или 270° дверями устанавливают открытой стороной перед торцом отводящего транспортера 7 на небольшом расстоянии от него таким образом, чтобы вертикальные плоскости симметрии транспортера и контейнера со стороны открытых дверей примерно совпадали. При этом, ось вращения первого звена 6.1 робота-манипулятора 6 располагается в плоскости оси симметрии отводящего транспортера 7, верхние кромки винтовых спусков 4 и 5 находятся в одной плоскости с краем торца отводящего транспортера 7, а их нижние кромки - над боковым обрамлением отводящего транспортера 7. Число степеней свободы манипулятора по формуле А.П.Малышева равно W=6×n-5×р=6×6-5×6=6. (Л.Н.Решетов. Конструирование рациональных механизмов. - М.: Машиностроение, 1987). Поворот звеньев манипулятора в процессе поиска и захвата груза в контейнере, перемещения груза на один из винтовых спусков или отводящий транспортер, возвращение руки робота за следующим грузом осуществляются точными сервоприводами. Такая кинематическая схема робота-манипулятора обеспечивает возможность захвата и выемки груза из любой точки внутреннего объема кузова контейнера с жесткой крышей.
Система управления устройства выгрузки штучных грузов из контейнера обеспечивает сканирование открытой стороны контейнера, нахождение верхнего слоя, из которого должна производиться выгрузка, и поиск в этом слое выгружаемого груза. Она обеспечивает синхронное выполнение сервоприводами всех движений руки робота-манипулятора в соответствии с задаваемыми режимами работы и траекториями движения руки робота с грузом и без него. Кроме того, она определяет нестандартное положение груза, изменяет движения руки робота в зависимости от этого положения, управляет действиями захвата, ведет учет выгруженных единиц груза, и выполняет ряд других необходимых и вспомогательных действий. Например, система управления обеспечивает управление отводящим транспортером, преобразование команд оператора «Пуск» и «Стоп» в сигналы управления устройствами, выводит на указатели или лампы сигналы останова устройства или иные сигналы для оператора.
Для создания наилучших условий выемки в первую очередь выгружают груз, расположенный в верхнем слое наиболее близко к открытой стороне контейнера. При расположении двух и более грузов на одинаковом расстоянии от открытой стороны контейнера для разрешения неопределенности в первую очередь выгружают груз, расположенный наиболее близко к одной (например, левой) из боковых стенок кузова контейнера. После захвата груза, его немного приподнимают (на 10-20 мм) и совершают им покачивающее вращательное движение посредством шарнира 6.VI относительно оси шестого звена на небольшой угол (5°-10°) по часовой стрелке и наоборот, чтобы гарантированно освободиться от контакта с соседними грузами.
Место, куда из контейнера должен быть перемещен груз (правый или левый спуски или транспортер), траекторию движения, момент сброса груза, траекторию возвращения руки робота для захвата следующего груза определяют следующим образом. Внутренний объем кузова контейнера условно (виртуально) делят (фиг.6) на три зоны: верхнюю левую 29, где грузы расположены ближе к левому винтовому спуску 4, верхнюю правую 30, где грузы расположены ближе к правому винтовому спуску 5, и нижнюю, где грузы расположены ближе к движущейся ленте 32 отводящего транспортера 7, расположенного у нижней кромки кузова контейнера 8. Такое разделение обеспечивает кратчайшие траектории выгрузки грузов, а следовательно, быстрейшее освобождение робота-манипулятора для обработки следующего груза. Границы зон на фронтальной проекции открытой стороны контейнера ABCD определяют следующим образом (на примере левой стороны). Точка О, соответствующая правому краю левого винтового спуска 4, соединяется прямыми OO1…OO2 с точками, расположенными на отрезке от левого края O1 до середины O2 ленты 32 отводящего транспортера 7. К серединам отрезков OO1…OO2 восстанавливаются перпендикуляры. Тогда кривая EF от левой кромки кузова контейнера в точке Е до оси симметрии кузова GO2 в плоскости ABCD в точке F будет служить геометрическим местом точек, равноудаленных от правого края винтового спуска 5 и ленты 32 отводящего транспортера 7, а указанные перпендикуляры будут касательными к этой кривой. Кривая EF характеризует нижнюю границу зоны выгрузки грузов на левый винтовой спуск 4, а область AGFE охватывает всю эту зону. Область BHFG, симметричная области AGFE, будет соответствовать зоне выгрузки грузов на правый винтовой спуск 5, а область DEFHC будет соответствовать зоне выгрузки грузов на движущуюся ленту 32 отводящего транспортера 7. Для разрешения неопределенности множество точек, соответствующих полуинтервалу (GF) можно отнести к зоне 29, а множество точек, соответствующих кривой EFH - к зоне 31.
В зависимости от требований производственного процесса, устройство работает с максимальной производительностью (режим S) или максимальной экономией энергозатрат (режим Е). Оптимизация траектории перемещения груза и возврата руки робота-манипулятора в положение начала захвата следующего груза может производиться для этих двух режимов работы робота-манипулятора. В режиме S, обеспечивающем максимальную производительность устройства, критерием оптимизации является минимальное время переноса груза из контейнера до места сброса и возвращения руки в точку захвата следующего груза. В режиме Е, когда по условиям эксплуатации от устройства не требуется максимальной производительности, критерием оптимизации может служить минимум энергозатрат, необходимых для переноса груза из контейнера на один из винтовых спусков или движущуюся ленту отводящего транспортера и возвращения руки робота в положение захвата следующего груза. Режим Е может отличаться от выше рассмотренного режима S, например, тем, что при выгрузке на винтовые спуски грузов из частей боковых зон, лежащих ниже уровня края винтового спуска, выгрузку производят непосредственно на движущуюся ленту. Тем самым избегается трата энергии на подъем грузов из этих частей боковых зон. При этом, естественно, производительность уменьшается за счет удлинения путей, по которым перемещают эти грузы. Это иллюстрирует фиг.7, где заштрихованный участок 33 левой боковой зоны 29 объединяется с зоной 31 выгрузки на движущуюся ленту транспортера. Аналогично происходит объединение участка 34 правой боковой зоны 30 с зоной 31. При этом для разрешения неопределенности множество точек, соответствующих кривой IKFLM, относится к зоне 31.
Все пространство внутри контейнера радиусом равным максимальной длине руки робота-манипулятора и высотой, равной высоте кузова контейнера, за исключением ограничений, накладываемых конструктивными частями устройства, условно (виртуально) разбивают на элементарные объемы с размерами, сравнимыми с минимально допустимыми размерами грузов, и заранее рассчитывают и запоминают оптимальные траектории перемещения груза от каждого элементарного объема места захвата груза в контейнере до места сброса груза на один из винтовых спусков или движущуюся ленту отводящего транспортера, а также траектории возвращения руки робота от места сброса груза до элементарного объема места захвата следующего груза в контейнере. Эти оптимальные траектории хранятся в постоянной памяти ПЗУ микроконтроллера 16. Там же хранятся программы для решения всех необходимых задач. Микропроцессор совместно с оперативной памятью ОЗУ и ПЗУ выполняет решение задач, возникающих в ходе работы устройства. Системный контроллер обеспечивает совместную работу ядра микропроцессора 17 через модуль ввода-вывода 18 и устройство УСО 19 с внешними объектами 20. Каждый внешний объект обращается к микропроцессору или получает сигналы от него через соответствующий одно- или двунаправленный канал устройства УСО 19.
Функции устройства выгрузки штучных грузов из контейнера поясняет алгоритм его работы на фиг.8. Перед запуском устройства оператор с помощью переключателя устанавливает выбранный режим работы Е или S. Нажатием кнопки «Пуск» (в средстве 26 управления отводящим транспортером) оператор запускает отводящий транспортер 7 и включает устройство выгрузки. Нахождение верхнего слоя грузов производится выдачей необходимых команд сервоприводам руки робота (средство 23 управления сервоприводом) и поиском с помощью сканирующего устройства (средство 21 определения положения груза в контейнере). Это могут быть сканеры: лазерный или механический, щуп которого закреплен на руке робота. Если слой не обнаружен, устройство останавливается и вырабатывается соответствующий сигнал оператору. Причиной ненахождения слоя может быть окончание процесса разгрузки данного контейнера. Если слой обнаружен, производится передача координат этого слоя микроконтроллеру. Микроконтроллер дает команду поиска груза в обнаруженном слое. После обнаружения груза следует передача координат этого груза микроконтроллеру. Микроконтроллер на основе полученных координат груза и выбранного положения переключателя выбора режима работы (Е или S) выбирает из постоянной памяти ПЗУ разработанный и хранящийся в ней оптимальный для данных координат груза маршрут по перемещению руки робота из исходного положения к месту нахождения груза в контейнере, а затем - к определенной выше площадке выгрузки. Затем выдаются соответствующие команды серводвигателям руки робота (средство 23 управления сервоприводом) и захвата (средство 25 управления захватом). При сближении захвата с выбранным грузом определяется, находится ли груз в правильном положении, при котором вакуумный захват может его захватить. Эта проверка может быть проведена или сканирующим устройством, или с помощью датчиков положения, закрепленных на звеньях руки робота. Если груз оказался в неправильном положении (например, повернут под значительным углом к плоскости открытой стенки контейнера), описание его фактического положения передается микроконтроллеру. Это описание фиксируется в оперативной памяти ОЗУ, микроконтроллер вырабатывает команду изменения положения захвата, после чего снова происходит проверка взаимоположения груза и захвата. Если груз оказался в правильном положении (или поворот захвата обеспечил стандартность его стыковки с грузом), производится выполнение захвата груза. Следующая операция -проверка на превышение веса и габаритов захваченного груза. Превышение предельно допустимых значений этих величин может произойти, если по какой-то причине произойдет, например, сцепление двух соседних грузов, или в контейнер при отправке был помещен недопустимо большой груз. Обнаружение превышения веса груза может быть произведено с помощью средства 28 определения веса захваченного груза. Превышение веса может быть обнаружено, например, с помощью встроенных в звенья руки робота датчиков (на фиг. не показаны). Это могут быть, например, тензодатчики или резонансные датчики типа Tuning-Fork фирмы Shinko Denshi, Япония. Обнаружение превышения габаритов груза может быть произведено с помощью средства 27 определения габаритов захваченного груза. Таким средством могут быть, например, лазерный (например, сканер WB4 фирмы Cyberware США) или механический сканер (например, механический сканер MicroScribe-3D фирмы Immersion, США). Другим средством определения превышения габаритов груза может служить система из двух рядов фотодатчиков 10 и 11, размещенных на рамках 9, показанных на фиг.2. При перемещении груза, он пересекает сначала лучи фотодатчиков ряда 10, а затем - ряда 11. Расстояние между этими рядами несколько превышает наибольший габаритный размер допускаемого груза. Сигналы одновременного пересечения лучей обоих рядов служат микроконтроллеру указанием на превышение габаритов груза. Если при перемещении груза за определенный промежуток времени происходит последовательное затемнение датчиков из первого по отношению к контейнеру вертикального ряда, а затем второго, то это говорит о том, что процесс выгрузки происходит нормально.
Если габариты или вес груза превышают предельно допустимые значения, устройство останавливается и подает оператору соответствующий световой или звуковой сигнал.
Если вес не превышает предельно допустимых значений, то из ПЗУ выбирается оптимальная траектория перемещения руки робота с грузом к месту разгрузки, и микропроцессором выдаются соответствующие команды серводвигателям руки робота. Рука робота направляется к ранее определенному месту выгрузки и сбрасывает там груз. Затем цикл поиска верхнего слоя и груза в нем повторяется, рука робота направляется по оптимальной траектории к выбранному грузу.
За счет того что выгрузка грузов из контейнера осуществляется роботом-манипулятором последовательно, гарантируется надежный интервал между грузами на движущейся ленте отводящего транспортера, и благодаря тому, что перемещение грузов из контейнера производится на места, расположенные в максимальной близости к контейнеру, внутренний объем которого условно разбивается на зоны, в которых грузы расположены на минимальных расстояниях от этих мест, причем в одном режиме эксплуатации устройства при перемещении грузов минимизируется время рабочих и холостых движений руки робота-манипулятора, а в другом минимизируются энергозатраты, достигаются соответственно максимальная производительность устройства или максимальная экономия энергозатрат.
Таким образом, достигнуты цели изобретения и решены поставленные технические задачи.
Возможность практической реализации устройства подтверждается тем, что оно может быть создано на базе имеющихся в продаже компонентов и изготавливаемых промышленностью контейнеров, транспортеров, роботов-манипуляторов, компьютеров и сенсорных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2441830C1 |
| СИСТЕМА ЗАГРУЗКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2381166C2 |
| СПОСОБ УКЛАДКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2377174C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗАГРУЗОЧНЫМ УСТРОЙСТВОМ ДЛЯ УКЛАДКИ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕР | 2008 |
|
RU2364565C1 |
| СПОСОБ УПРАВЛЕНИЯ СОРТИРОВОЧНОЙ УСТАНОВКОЙ С УКЛАДКОЙ ШТУЧНЫХ ГРУЗОВ В КОНТЕЙНЕРЫ | 2011 |
|
RU2472594C1 |
| СПОСОБ РЕГИСТРАЦИИ СОСТОЯНИЯ ПАРАМЕТРОВ КОНТЕЙНЕРА ПО ПУТИ ЕГО СЛЕДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325621C1 |
| СПОСОБ ГЕНЕРАЦИИ И ПРИЕМА СООБЩЕНИЙ О НЕСАНКЦИОНИРОВАННОМ ДОСТУПЕ К СОДЕРЖИМОМУ КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2344484C2 |
| КОНТЕЙНЕР | 2006 |
|
RU2304552C1 |
| КОНТЕЙНЕР | 2006 |
|
RU2323147C1 |
| КОМПЛЕКС СОРТИРОВКИ И НАКАПЛИВАНИЯ ПОСЫЛОК | 2013 |
|
RU2566316C2 |

Изобретение относится к области почтовой связи, складского хозяйства и может быть использовано при автоматизации выгрузки грузов, по форме близких к параллелепипеду. Устройство выгрузки штучных грузов из контейнера состоит из вертикальной станины, к вертикальным частям (1) и (2) которой с внутренних сторон неподвижно крепятся симметрично друг другу левый (4) и правый (5) винтовые спуски с шириной поверхности большей диагонали в плане груза с максимально допустимыми размерами в плане. Посередине внутренней стороны горизонтальной части (3) станины к ней крепится робот-манипулятор (6), осуществляющий поиск и захват груза в контейнере (8), перемещение его по оптимальной траектории и сброс или на поверхность одного из спусков (4, 5) или на отводящий транспортер (7). Плоскость симметрии отводящего транспортера перпендикулярна плоскости станины, в которой лежат вертикальные и горизонтальная ее части. Устройство содержит также систему управления, которая определяет начало и завершение работы, осуществляет поиск груза в контейнере, передачу и обработку информации. Технический результат - повышение производительности устройства выгрузки штучных грузов из контейнера на отводящий транспортер при обеспечении гарантированного интервала между выгружаемыми грузами. 5 з.п. ф-лы, 8 ил.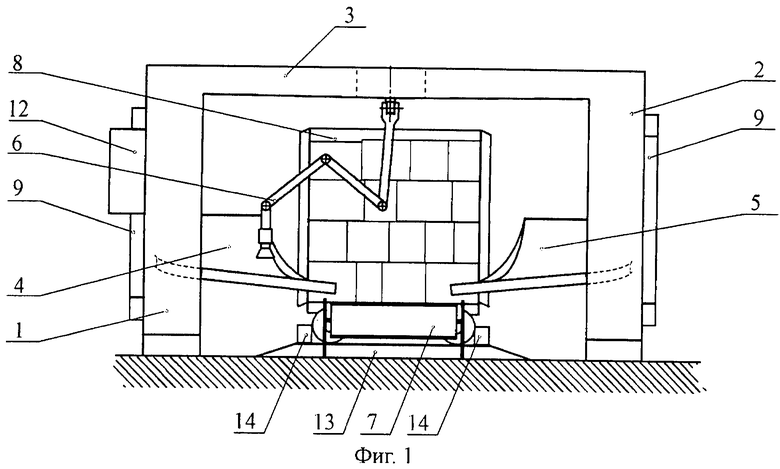
1. Устройство выгрузки штучных грузов из контейнера, содержащее станину, разгрузочный робот-манипулятор, систему управления и отводящий транспортер, место установки контейнера для разгрузки, отличающееся тем, что станина выполнена в виде конструкции с двумя вертикально направленными частями и замыкающей их горизонтальной частью, причем к вертикальным частям с внутренних сторон неподвижно крепятся симметрично друг другу правый и левый винтовые спуски, нижние кромки спусков расположены над бортовыми ограждениями отводящего транспортера, разгрузочный робот-манипулятор закреплен на горизонтальной части станины, плоскость симметрии отводящего транспортера перпендикулярна плоскости станины, в которой лежат вертикальные и горизонтальная ее части, причем на спусках имеется отбортовка для предотвращения смещения груза за их габариты, а ширина спусков больше наибольшей диагонали сторон груза с максимально допустимыми размерами.
2. Устройство выгрузки штучных грузов из контейнера по п.1, отличающееся тем, что указанный разгрузочный робот-манипулятор, выполненный по кинематической схеме с шестью степенями свободы, содержит вертикально расположенную стойку, шесть подвижных звеньев, образующих с шарнирами шесть низших кинематических пар, причем оси шарниров каждого из двух соседних звеньев взаимно перпендикулярны, к концу шестого подвижного звена прикреплен вакуумный захват, причем каждое подвижное звено соединено с соответствующим сервоприводом, а захват соединен с источником вакуума.
3. Устройство выгрузки штучных грузов из контейнера по п.1, отличающееся тем, что оно содержит систему управления, содержащую управляющий микроконтроллер с микропроцессором, системным контроллером, оперативным запоминающим устройством (ОЗУ), постоянным запоминающим устройством (ПЗУ), модулем ввода-вывода, и устройство связи с объектом (УСО), причем микропроцессор соединен с ОЗУ, ПЗУ и системным контроллером, системный контроллер соединен, кроме того, шинами данных и управления с ОЗУ, ПЗУ и через интерфейсы ввода и вывода модуля ввода-вывода - с УСО, которое через соответствующие каналы соединяется со средством определения положения груза в контейнере, средством определения положения руки робота, средством управления сервоприводами узлов манипулятора, средством управления вакуумным захватом, средствами передачи и приема сигналов управления оператору и от него, а указанное средство передачи и приема сигналов оператору и от него соединено, кроме того, со средством управления отводящим транспортером.
4. Устройство выгрузки штучных грузов из контейнера по п.3, отличающееся тем, что средство определения положения груза в контейнере является лазерным сканером.
5. Устройство выгрузки штучных грузов из контейнера по п.3, отличающееся тем, что средство определения положения груза в контейнере является механическим сканером.
6. Устройство выгрузки штучных грузов из контейнера по п.3, отличающееся тем, что средство определения положения руки робота является лазерным сканером.
| US 5007785 A, 16.04.1991 | |||
| Устройство для загрузки и выгрузкишТучНыХ гРузОВ из КРыТыХ жЕлЕзНОдО-РОжНыХ ВАгОНОВ | 1978 |
|
SU819021A1 |
| Установка для загрузки и разгрузки транспортных средств | 1989 |
|
SU1640080A1 |
| US 4281955 A, 04.08.1981 | |||
| US 5015145 A, 14.05.1991. | |||

