Изобретение относится к области приборостроения и может быть использовано при автоматизации загрузки грузов, по форме близких к параллелепипеду, примерно одинаковой высоты, например посылок, ящиков с письменной корреспонденцией и др. в контейнеры.
Известны устройства SU 1244061, 1986; SU 1244062, 1986; а также описанные в [Буланов Э.А., Третенко Ю.И. Подъемно-транспортные и погрузочно-разгрузочные устройства почтовой связи: Учеб. пособие для вузов. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 223 с.], применение которых, например, при автоматизации загрузки посылок в контейнеры неэффективно, так как при этом не обеспечиваются близкие к максимальным значения коэффициентов объемного заполнения и устойчивости контейнера.
В этой связи наиболее близким по принципу укладки является система загрузки контейнеров посылками с помощью погрузочных роботов, имитирующих процесс ручной загрузки (см. Буланов Э.А., Третенко Ю.И. Подъемно-транспортные и погрузочно-разгрузочные устройства почтовой связи: Учеб. пособие для вузов. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - с.190), в котором посылки при поступлении на загрузку опознаются, ориентируются, определяются их размеры и размещаются на стеллажах; ЭВМ, запоминающая размеры посылок, вычисляет последовательность загрузки для оптимальной укладки и подает команды загрузочному роботу, который берет со стеллажей соответствующую посылку и помещает ее в контейнер по траектории, задаваемой ЭВМ.
Недостатки прототипа заключены в том, что при измерении характеристик посылок не учитывается ее масса, вследствие чего невозможно обеспечить при загрузке соблюдение ограничения на грузоподъемность контейнера, а также, по возможности, минимизировать высоту центра тяжести загруженного контейнера.
Задачей, на решение которой направлено изобретение, является обеспечение соблюдения ограничения по грузоподъемности контейнера и минимизация, по возможности, высоты центра тяжести груженого контейнера.
Решение указанной задачи достигается тем, что в предложенной системе при определении положения груза в контейнере используется измерительная информация о габаритных размерах и массе грузов, последовательности поступления грузов, габаритных размерах и грузоподъемности контейнера. При этом система управления загрузочным устройством включает измерительный комплекс (ИК) по определению габаритных размеров, массы и последовательности поступления грузов; системный блок (СБ), в который поступает информация из ИК, а также информация о местах размещения поступающих грузов, времени окончания поступления грузов и готовности к работе по укладке грузов в контейнер исполнительных механизмов загрузочного устройства или оператора; запоминающее устройство (ЗУ), в котором накапливается информация, поступающая из СБ; блок измерения площади груза (БИП), в который из первого выхода ЗУ передаются данные о длине груза lг и ширине груза mг, на основании которых производится расчет площади груза Sг=lг·mг; блок расчета коэффициента формы груза (БРФ), в который из второго выхода ЗУ передаются данные о длине груза lг и ширине груза mг, на основании которых производится расчет коэффициента формы груза Кфг=lг/mг; блок ранжирования грузов (БР), на первый и второй входы которого из БИП и БРФ поступают значения рассчитанных параметров соответственно Sг и Кфг, а на третий вход поступает из третьего выхода ЗУ информация о массе груза gг и последовательности поступления груза в устройство, грузам присваиваются номера 1, 2,… в последовательности убывания значений Sг, при этом, если два груза имеют одинаковое значение Sг, то меньший номер присваивается грузу с большим значением Кфг, если грузы имеют одинаковые значения Sг и Кфг, то меньший номер присваивается грузу с большей массой, если грузы имеют одинаковые значения Sг, Кфг и массу, то меньший номер присваивается грузу, раньше поступившему в устройство; блок моделирования укладки грузов в контейнер (БМ), где хранится информация о внутренних размерах кузова контейнера: длине L>lг, ширине М>mг, высоте Н большей, чем высота укладываемых грузов hг, а также допустимой суммарной массе грузов G, укладываемых в контейнер, и куда из БР поступает рассчитанная последовательность номеров грузов с размерами lг, mг и массой gг, и в котором на основании этой информации составляется оптимальный план расположения грузов на плоскости формирования слоя и проверка соблюдения ограничений на грузоподъемность контейнера и количество укладываемых слоев; устройство управления исполнительными механизмами и загрузочным органом (УУ), на первый вход которого из четвертого выхода ЗУ передается информация о соответствии номера поступившего груза номеру ячейки предварительного хранения груза, а на второй и третий входы соответственно и первого и второго выходов БМ - о рассчитанной последовательности подачи грузов на укладку в контейнер и о положении грузов в контейнере, на основе которой формируется синхронизированная последовательность команд, управляющих исполнительными механизмами и загрузочным органом; автоматизированное рабочее место оператора (АРМ), на мониторе которого может быть визуализирован оптимальный план укладки грузов в контейнере на основе информации, поступающей со второго входа БМ, в соответствии с которым оператор имеет возможность вручную уложить груз в контейнер в нужное положение.
Сущность изобретения поясняется чертежами, где на фиг.1 представлен фрагмент структурной схемы системы управления загрузочным устройством, реализующей предлагаемый способ, на фиг.2 - пример определения положения груза при укладке в контейнер.
Система управления загрузочным устройством включает измерительный комплекс по определению габаритных размеров, массы и последовательности поступления грузов ИК 1; системный блок СБ 2, на вход которого соединен с информационным выходом ИК 1, при этом в СБ поступают сведения о местах размещения поступающих грузов, об измеренном времени окончания поступления грузов и о готовности к работе по укладке грузов в контейнер исполнительных механизмов загрузочного устройства или оператора (на фиг.1 не показано); в запоминающем устройстве ЗУ 3 накапливается информация, поступающая из СБ 2; блок измерения площади груза БИП 4, в на вход которого из первого выхода ЗУ 3 передаются результаты измерений о длине груза lг и ширине груза mг, на основании которых производится определение площади груза Sг=lг·mг; блок расчета коэффициента формы груза БРФ 5, в на вход которого из второго выхода ЗУ 3 передаются данные об измеренной длине груза lг и ширине груза mг, на основании которых производится определение коэффициента формы груза Кфг=lг/mг; блок ранжирования грузов БР 6, на первый и второй входы которого из БИП 4 и БРФ 5 поступают сигналы о значениях рассчитанных параметров соответственно Sг и Кфг, а на третий вход поступает из третьего выхода ЗУ 3 измерительный сигнал о массе груза gг и последовательности поступления груза в устройство, поступающим грузам присваиваются порядковые номера 1, 2,… в последовательности убывания значений Sг, при этом, если два груза имеют одинаковое значение Sг, то меньший номер присваивается грузу с большим значением Кфг, если грузы имеют одинаковые значения Sг и Кфг, то меньший номер присваивается грузу с большей массой, если грузы имеют одинаковые значения Sг, Кфг и массу, то меньший номер присваивается грузу, раньше поступившему в устройство; сформированная таким образом последовательность подачи грузов на укладку обеспечивает при правильном расположении груза на плоскости максимальную плотность укладки, по возможности минимальную высоту центра тяжести груженого контейнера, соблюдение принципа «первым поступил - первым загружен», блок моделирования укладки грузов в контейнер БМ 7, где хранится измерительная информация о внутренних размерах кузова контейнера: длине L>lг, ширине М>mг, высоте Н большей, чем высота укладываемых грузов hг, а также допустимой суммарной массе грузов G, укладываемых в контейнер, и куда из БР 6 поступает сформированная последовательность порядковых номеров грузов с размерами lг, mг и массой gг, и в котором на основании этой измерительной информации составляется оптимальный план расположения грузов на плоскости формирования слоя и проверка соблюдения ограничений на грузоподъемность контейнера и количество укладываемых слоев; устройство управления исполнительными механизмами и загрузочными органами УУ 8, на первый вход которого из четвертого выхода ЗУ 3 поступает информационный сигнал о соответствии номера поступившего груза номеру ячейки предварительного хранения груза, а на второй и третий входы соответственно из первого и второго выходов БМ 7 - о сформированной последовательности подачи грузов на укладку в контейнер и о положении грузов в контейнере, на основе которой формируется синхронизированная последовательность команд, управляющих исполнительными механизмами и загрузочным органом; автоматизированное рабочее место оператора АРМ 9, на мониторе которого может быть визуализирован процесс формирования оптимального плана укладки грузов в контейнере на основе измерительной информации, поступающей со второго входа БМ 7, в соответствии с которым оператор имеет возможность вручную скорректировать последовательность укладки груза в контейнер в нужное положение.
Предлагаемая система управления загрузочным устройством для укладки штучных грузов в контейнер работает следующим образом.
Измерительные сигналы о габаритных размерах, массе и последовательности поступления грузов из ИК 1 передаются в СБ 2, в который поступает также измерительная информация о местах размещения поступающих грузов, времени окончания поступления грузов и готовности к работе по укладке грузов в контейнер исполнительных механизмов загрузочного устройства или оператора. Из СБ 2 измерительная информация передается для накапливания в ЗУ 3 (фиг.1).
По сигналу о начале укладки грузов в контейнер, поступающему из СБ 2, измерительные сигналы первого и второго выходов ЗУ 3 о длине груза lг и ширине груза mг передаются в БИП 4 и БРФ 5, об измеренной массе груза gг и последовательности поступления груза в устройство - из третьего выхода на третий вход БР 6, о соответствии порядкового номера поступившего груза номеру ячейки предварительного хранения груза - с четвертого выхода на первый вход УУ 8.
В БИП 4 производится определение площади груза Sг=lг·mг, а в БРФ 5 - коэффициента формы груза Кфг=lг/mг. Значения сформированных сигналов о параметрах Sг и Кфг поступают из БИП 4 и БРФ 5 соответственно на первый и второй входы БР 6.
В БР 6 грузам присваиваются порядковые номера 1, 2,… в последовательности убывания значений Sг.При этом, если два груза имеют одинаковое значение Sг, то меньший номер присваивается грузу с большим значением Кфг. Если грузы имеют одинаковые значения Sг и Кфг, то меньший номер присваивается грузу с большей массой. Если грузы имеют одинаковые значения Sг, Кфг и массу, то меньший номер присваивается грузу, раньше поступившему в загрузочное устройство. Сформированная таким образом последовательность подачи грузов на укладку обеспечивает при правильном расположении груза на плоскости максимальную плотность укладки, минимальную высоту центра тяжести груженого контейнера, соблюдение принципа «первым поступил - первым загружен». Сформированная последовательность порядковых номеров грузов с размерами lг, mг и массой gг поступает на вход БМ 7, в котором производится определение расположения груза на плоскости формирования слоя и проверка соблюдения ограничений на грузоподъемность контейнера и количество укладываемых слоев.
В БМ 7 хранится измерительная информация о внутренних размерах кузова контейнера: длине L>lг, ширине М>mг, высоте Н большей, чем высота укладываемых грузов hг, а также - о допустимой суммарной массе грузов G, укладываемых в контейнер. На основе имеющейся измерительной информации и сигналов, поступивших из БР 6, в БМ 7 формируется оптимальный план размещения грузов в контейнере. Моделирование укладки грузов, представленных параллелепипедами одинаковой высоты hг с размерами в плане lг·mг и массой gг, осуществляется последовательно слоями, начиная с нижнего. Заполнение каждого слоя в контейнере производится последовательно, начиная от одного из дальних, например, правого, по отношению к загрузочному органу углов контейнера в двух взаимно перпендикулярных направлениях. Обязательным условием при моделировании укладки грузов внутри слоя является прилегание двух смежных сторон укладываемого груза или к внутренним стенкам кузова контейнера, или к стенке и стороне соседнего груза, или к сторонам соседних грузов со стороны угла, от которого начинается заполнение контейнера.
Критерием определения положения груза на плоскости формирования слоя на каждом шаге укладки грузов служит минимум коэффициента формы пространства, остающегося свободным после размещения на плоскости данного груза, Кфс, формула для расчета которого имеет вид
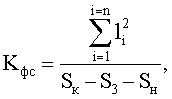
где i=1, 2,…, n - номер прямоугольника в остающемся после размещения укладываемого груза в свободном пространстве при разбиении последнего на прямоугольники линиями, проходящими от ребер груза, не соприкасающихся со стенками кузова или соседними грузами, параллельно сторонам контейнера; li - длина i-го прямоугольника; n - число прямоугольников в остающемся свободном пространстве контейнера; Sк=L·М - площадь поперечного сечения кузова контейнера; Sз - площадь плоскости формирования слоя, занятая уложенными грузами; Sн - площадь плоскости формирования слоя, неудобная для загрузки, равная площади прямоугольника, прилегающего к выступу размещаемого груза со стороны, противоположной направлению загрузки. Прямоугольники, образующиеся при разбиении свободного пространства линиями, проходящими вдоль продольной стороны контейнера, могут отличаться от прямоугольников, образующихся при разбиении свободного пространства контейнера линиями, проходящими вдоль поперечной стороны контейнера, поэтому могут оказаться различными значения Кфс. Вследствие этого для каждого возможного варианта размещения груза на плоскости формирования слоя в контейнере определяют два значения Кфс. Окончательно выбирается такой вариант размещения груза, при котором достигается минимум Кфс.
На фиг.2 в качестве примера изображены возможные варианты размещения на плоскости формирования слоя груза №2 после того, как было определено положение груза №1. Для выбора положения, в которое должен быть уложен груз №2, рассчитываются значения коэффициентов Кфс:








и выбирается то положение груза, при котором значение Кфс имеет минимальное значение.
Для приведенных на фиг.2 соотношений размеров поперечного сечения кузова контейнера (плоскости формирования слоя) М=0,667L и размещаемых грузов lг1=0,417L; mг1=0.25L; lг2=0,333L; mг2=0,167L минимальное значение имеет коэффициент Кфс41=1,27, поэтому при укладке груз №2 должен занять положение 4.
После первой итерации размещения грузов на плоскости формирования слоя внутри слоя могут остаться незаполненные участки, которые необходимо проверить по очереди, начиная от участка с большей площадью, по рассмотренному способу на возможность укладки в них грузов из ранжированной последовательности, хранящейся в БР 6, за исключением уже уложенных грузов. Таким образом, достигается максимальная или близкая к максимальной плотность укладки грузов на поверхности формирования каждого слоя. Процесс моделирования укладки грузов в контейнер в БМ 7 продолжается до тех пор, пока число слоев не превысит допустимое значение H/h, суммарная масса укладываемых грузов не превысит заданную грузоподъемность контейнера G или не останется грузов в ранжированной последовательности, поступающей из БР 6. Из БМ 7 данные о сформированной последовательности подачи грузов на укладку в контейнер передаются с первого выхода на второй вход УУ 8, а результаты измерений о положении грузов в контейнере - со второго выхода на третий вход УУ 8 и на монитор АРМ 9 оператора.
На основе измерительной информации и соответствующих сигналов, поступивших из БМ 7 и ЗУ 3, в УУ 8 формируется синхронизированная последовательность команд, управляющих работой исполнительных механизмов и загрузочного органа. В соответствии с планом укладки грузов в контейнере, визуализированном на мониторе АРМ 9, по измерительной информации и соответствующих сигналов, поступившей из БМ 7, оператор имеет возможность скорректировать порядок укладки груза в контейнер.
Изобретение относится к области приборостроения и может быть использовано при управлении процессом обработки штучных грузов, по форме близких к параллелепипеду, примерно одинаковой высоты, например посылок, ящиков с письменной корреспонденцией и др. и может быть использовано при автоматической или ручной загрузке грузов в контейнеры. Система содержит измерительный комплекс (1), системный блок (2), запоминающее устройство (3), блок (4) расчета площади груза, блок (5) расчета коэффициента формы груза, блок (6) ранжирования грузов по показателям площади груза, коэффициента формы груза, массы груза, порядка поступления груза в загрузочное устройство, блок (7) моделирования укладки грузов в контейнер, в котором определяется положение груза на плоскости формирования слоя по критерию минимума коэффициента формы пространства, остающегося свободным после размещения на плоскости данного груза, а также учитываются ограничения на число слоев укладываемых грузов и грузоподъемность контейнера. Изобретение обеспечивает наибольшую плотность укладки грузов в контейнер, соблюдение ограничения по грузоподъемности контейнера и минимизирует, по возможности, высоту центра тяжести груженого контейнера. 2 ил.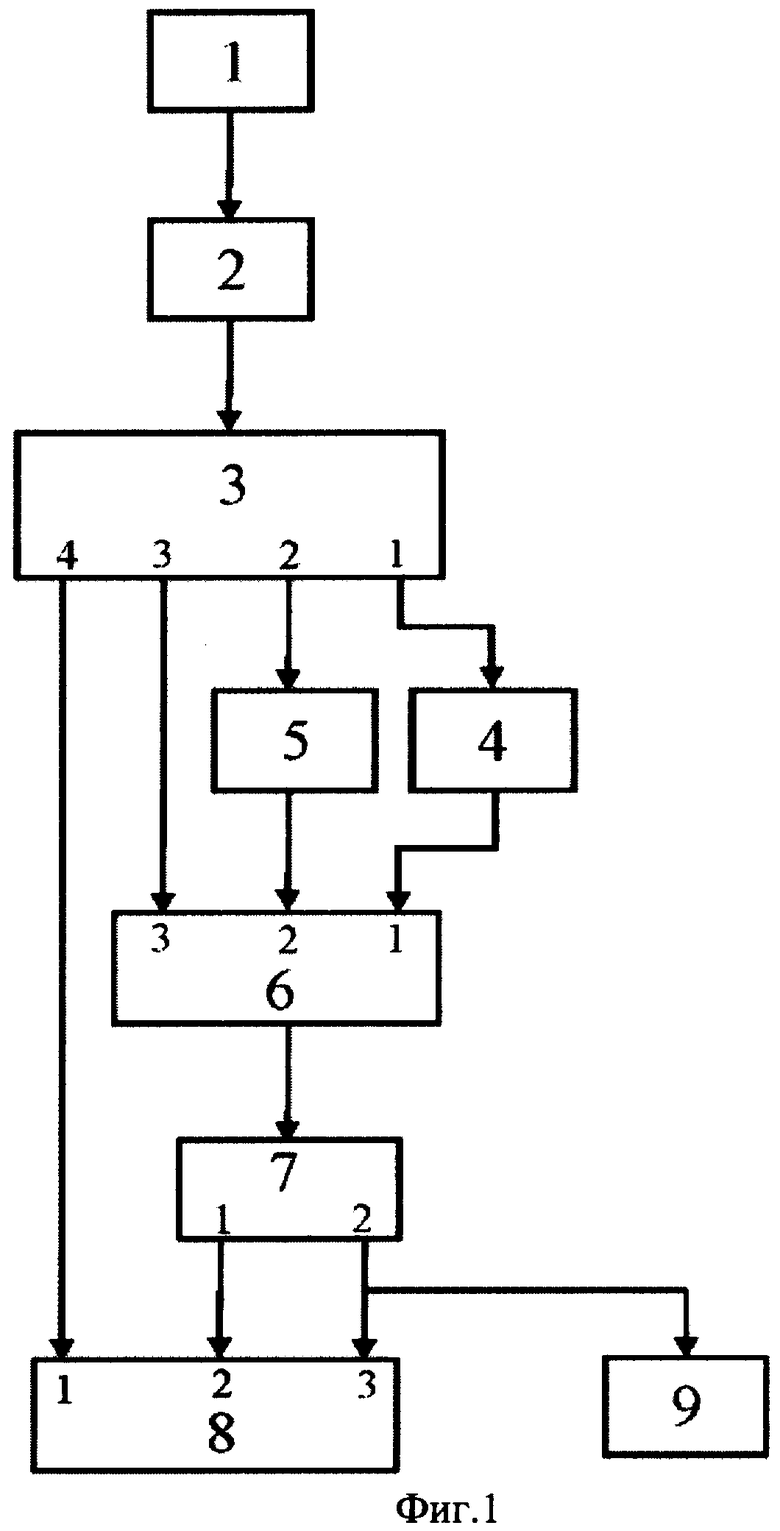
Система управления загрузочным устройством для укладки штучных грузов в контейнер содержит последовательно соединенные измерительный комплекс (ИК) (1) для определения габаритных размеров, массы и последовательности поступления грузов, системный блок (СБ) (2), в который поступает измерительная информация из ИК (1), а также информация о местах размещения поступающих грузов, времени окончания поступления грузов и готовности к работе по укладке грузов в контейнер исполнительных механизмов загрузочного устройства или оператора и запоминающее устройство (ЗУ) (3), в котором накапливается информация, поступающая из СБ (2), а также блок измерения площади груза (БИП) (4), на вход которого из первого выхода ЗУ поступают данные о длине груза lг и ширине груза mг, на основании которых производится определение площади груза Sг=lг·mг, блок расчета коэффициента формы груза (БРФ) (5), на вход которого из второго выхода ЗУ (3) передаются данные о длине груза lг и ширине груза mг, на основании которых производится расчет коэффициента формы груза Кфг=lг/mг, блок ранжирования грузов (БР) (6), на первый и второй входы которого из БИП (4) и БРФ (5) поступают сигналы о значении параметров соответственно Sг и Кфг, а на третий вход поступает из третьего выхода ЗУ (3) информация о массе груза gr и последовательности поступления груза в устройство, в БР (6) грузам присваиваются номера 1, 2, … в последовательности убывания значений Sг, при этом, если два груза имеют одинаковое значение Sг, то меньший номер присваивается грузу с большим значением Кфг, если грузы имеют одинаковые значения Sг и Кфг, то меньший номер присваивается грузу с большей массой, если грузы имеют одинаковые значения Sг, Кфг и массу, то меньший номер присваивается грузу, раньше поступившему в устройство, блок моделирования укладки грузов в контейнер (БМ) (7), в котором хранится информация о внутренних размерах кузова контейнера: длине L>lг, ширине M>mг, высоте Н большей, чем высота укладываемых грузов hг, а также допустимой суммарной массе грузов G, укладываемых в контейнер, и куда из БР (6) поступает сформированная последовательность номеров грузов с размерами lг, mг, и массой gг, и в котором на основании этой информации составляется оптимальный план расположения грузов на плоскости формирования слоя и проверка соблюдения ограничений на грузоподъемность контейнера и количество укладываемых слоев, устройство управления исполнительными механизмами и загрузочным органом (УУ) (8), на первый вход которого из четвертого выхода ЗУ (3) передается информация о соответствии номера поступившего груза номеру ячейки предварительного хранения груза, а на второй и третий входы соответственно с первого и второго выходов БМ - о рассчитанной последовательности подачи грузов на укладку в контейнер и о положении грузов в контейнере.
| БУЛАНОВ Э.А., ТРЕТЕНКО Ю.И | |||
| Подъемно-транспортные и погрузочно-разгрузочные устройства почтовой связи: Учеб | |||
| пособие для вузов, 2-е изд., перераб | |||
| и доп | |||
| - М.: Радио и связь, 1990, с.190 | |||
| Устройство для программного управления загрузкой | 1984 |
|
SU1267359A1 |
| Система автоматического управления укладкой кирпича | 1988 |
|
SU1609672A1 |

