Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам.
Известен грузоподъемный стол, содержащий основание и подвижную платформу, шарнирно связанные между собой перекрещивающимися рычагами типа «Нюрнбергские ножницы», и привод подъема, включающий в себя ходовой винт, смонтированный в корпусе зубчатого редуктора, зацепленный с гайкой, шарнирно смонтированный на плече одного из рычагов, и двигатель, связанный передачей с гибким бесконечным звеном с редуктором, в котором, с целью снижения габаритов в нижнем положении платформы, редуктор и двигатель закреплены на соответствующих рамах, каждая из которых снабжена шарниром, который с возможностью возвратно-поступательного движения смонтирован в соответствующей направляющей, причем направляющие выполнены в основании, а рамы связаны между собой верхними и нижними шарнирными тягами, верхняя из которых параллельна линии, проходящей по нормали через оси валов редуктора и двигателя и равна расстоянию между ними, а шарниры нижней тяги соосны с осями шарниров рам, причем обеими рамами и тягами образован шарнирно-рычажный параллелограммный четырехзвенник, нижняя тяга связана с нижним плечом другого рычага, а гайка - с верхним плечом одного рычага; с целью повышения надежности он снабжен дополнительными перекрещивающимися рычагами типа «Нюрнбергские ножницы», причем стороны шарниров основных и дополнительных указанных рычагов закреплены по краям стола, и подвижные плечи рычагов соединены между собой трособлочной системой (авторское свидетельство SU №1401006 A1, M. кл.4 В66F 7/06. Грузоподъемный стол / А.А.Разумов (СССР). - Заявка №4142121/29-11; Заявлено 31.10.1986; Опубл. 07.06.1988, Бюл. №21. // Открытия. Изобретения. - 1988. - №21).
К недостаткам описанного грузоподъемного стола относятся сложность конструкции, низкая техническая надежность привода подъема, большая масса и габариты привода.
Сущность заявленного изобретения заключается в следующем.
Задача, на решение которой направлено заявленное изобретение, - повышение технической и эксплуатационной надежности.
Технический результат - повышение грузоподъемности и упрощение конструкции.
Указанный технический результат достигается тем, что в известном грузоподъемном столе, содержащем основание и подвижную платформу, шарнирно связанные между собой парами перекрещивающиеся рычаги типа «Нюрнбергские ножницы», одни концы которых шарнирно закреплены на основании и подвижной платформе, а другие концы этих же рычагов посредством опор качения размещены с возможностью перемещения в направляющих, соответственно, размещенных на подвижной платформе и основании, и привод подъема, включающий в себя гайку, ходовой винт, зубчатый редуктор, имеющий корпус, и его электродвигатель, согласно изобретению грузоподъемный стол снабжен дополнительными гайкой и ходовым винтом, при этом дополнительный винт смонтирован соосно и оппозитно основному винту, оси симметрии винтов совмещены с осями шарниров нижних концов первой пары рычагов и посредством подшипниковых опор размещены на основании, упомянутые гайки на основном и дополнительном винтах выполнены с левой и правой навивками резьб, а каждая гайка имеет соосные разноориентированные цапфы, опоры качения нижних концов другой пары рычагов соединены с общей осью, на которой смонтированы буксы, имеющие подшипники скольжения и разноориентированные цапфы для шарнирного соединения с тягами, пары которых соединены с основной и дополнительными гайками через разноориентированные цапфы последних с возможностью размещения этих тяг либо параллельно, либо по сторонам равнобокой трапеции; двигатель, корпус зубчатого редуктора, основные и дополнительные гайки и винты размещены симметрично продольно-вертикальной плоскости симметрии стола и закреплены на основании.
Изобретение поясняется чертежами.
На фиг.1 схематично изображен грузоподъемный стол при крайнем нижнем положении подвижной платформы, вид сбоку.
На фиг.2 - сечение А-А на фиг.1, механизм привода подвижной платформы при максимальном удалении общей оси опор качений нижних концов перекрещивающихся рычагов от основного и дополнительного винтов.
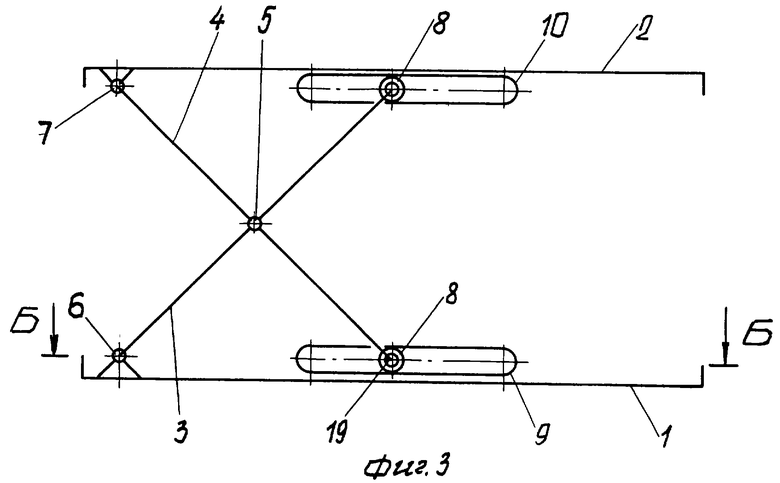
На фиг.3 представлен грузоподъемный стол при поднятой подвижной платформе над основанием, вид сбоку.
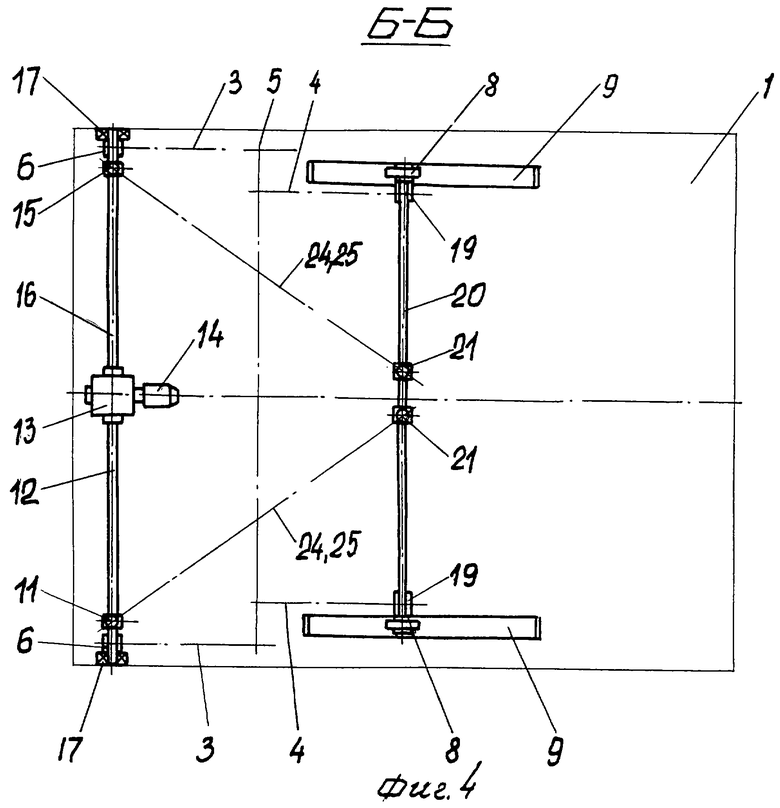
На фиг.4 - сечение Б-Б на фиг.3, механизм привода подвижной платформы при минимальном удалении общей оси опор качений нижних концов перекрещивающихся рычагов от основного и дополнительного винтов.
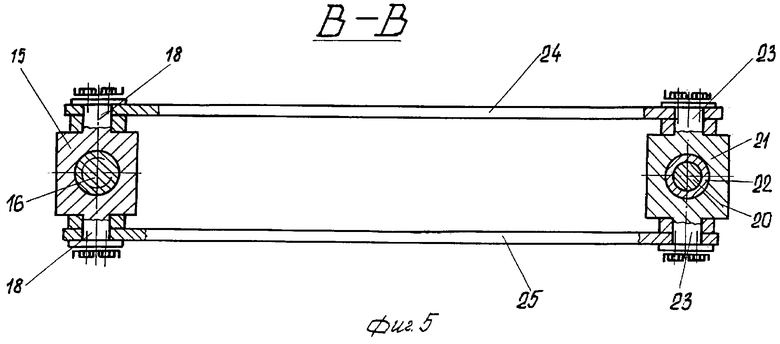
На фиг.5 - сечение В-В на фиг.2, поперечно-вертикальный разрез гайки на дополнительном винте и буксы на общей оси опор нижних концов перекрещивающихся рычагов и пары тяг.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Грузоподъемный стол содержит основание 1 и подвижную платформу 2. Подвижная платформа 2 и основание 1 между собой связаны шарнирно парами перекрещивающихся рычагов 3 и 4 типа «Нюрнбергских ножниц». Пары перекрещивающихся рычагов 3 и 4 соединены между собой общей осью 5. Концы 6 и 7 перекрещивающихся рычагов 3 и 4 шарнирно закреплены на основании 1 и подвижной платформе 2. Другие концы этих же рычагов 3 и 4 посредством опор качения 8 размещены с возможностью перемещения в направляющих 9 и 10, соответственно размещенных на основании 1 и подвижной платформе 2.
Привод подъема подвижной платформы 2 на основании 1 включает в себя гайку 11, ходовой винт 12, зубчатый редуктор 13, имеющий корпус и его двигатель 14.
Грузоподъемный стол снабжен дополнительной гайкой 15 и ходовым винтом 16. Дополнительный винт 16 смонтирован соосно и оппозитно основному винту 12. Оси симметрии винтов 12 и 16 совмещены с осями шарниров нижних рычагов 3 и посредством подшипников опор 17 размещены на основании 1. Упомянутые гайки 11 и 15 на основном винте 12 и дополнительном винте 16 выполнены с левой и правой навивками резьб.
Каждая гайка 11 (15) (см. фиг.5) имеет соосные разноориентированные цапфы 18.
Опоры качения 8 нижних концов 19 рычагов 4 соединены общей осью 20. На общей оси 20 смонтированы буксы 21. Каждая букса 21 имеет подшипник скольжения 22 и соосные равноориентированные цапфы 23 для шарнирного соединения с тягами 24 и 25.
Основная гайка 11 и дополнительная гайка 15 соединены парами тяг 24 и 25 с буксами 21. При определенных положениях гаек 11 и 15 на винтах 12 и 16 пары тяг 24 и 25 могут быть взаимно размещены либо параллельно (см. фиг.2), либо по сторонам равнобокой трапеции (см. фиг.4), перемещая при этом общую ось 20 с опорами 8 в направляющими 9 основания 1. Таким образом буксы 21 с возможностью смещения размещены на общей оси 20 опор качений 8 нижних концов 19 рычагов 4 в общих парах перекрещивающихся рычагов 3 и 4.
Двигатель 14, зубчатый редуктор 13, основные и дополнительные гайки 11 и 15 и винты 12 и 16 размещены симметрично продольно-вертикальной плоскости симметрии стола и закреплены на основании 1.
Двигатель 14 электрически соединен с источником трехфазного тока напряжением 380 В через реверсивный пост управления.
Грузоподъемный стол работает следующим образом.
После установки груза на подвижную платформу 2 включают питание двигателя 14, передающего через зубчатый редуктор 13 вращение на основной винт 12 и дополнительный винт 16. Винты 12 и 16 передают усилия на основную гайку 11 и дополнительную гайку 15.
Вращение винтов 12 и 16 приводит к тому, что гайки 11 и 15 (см. последовательно фиг.2 и 4) начинают смещаться вдоль винтов 12 и 16 от корпуса зубчатого редуктора 13. При перемещении гаек 11 и 15 через разноориентированные цапфы 18 гаек 11 и 15 перемещают пары тяг 24 и 25.
Парами тяг 24 и 25 через буксы 21 подтягивается общая ось 20 в направлении корпуса зубчатого редуктора 13. Опоры качений 8 перекатываются в направляющих 9 основания 1.
Перемещение общей оси 20 приводит к линейному смещению нижних концов 19 рычагов 4. Это смещение нижних концов 19 рычагов 4 заставляет другие рычаги 3 поворачиваться вокруг общей оси 5. Угловым смещением рычагов 4 и 3 вокруг оси 5 другими концами 7 и опорами качений 8 в направляющих 10 производится подъем подвижной платформы 2.
Для опускания подвижной платформы 2 в исходное положение над основанием 1 через пост управления изменяют направление вращения основного и дополнительного винтов 12 и 16. В этом случае парами тяг 24, 25 общая ось 20 удаляется от оси симметрии винтов 12 и 16, а платформа 2 смещается вниз.
Описанная конструкция грузоподъемного стола обеспечивает подъем и опускание подвижной платформы 2, строгое фиксируемое положение на любой высоте. Предложенный привод подъема подвижной платформы 2 обеспечивает повышение грузоподъемности, упрощение конструкции при высокой эксплуатационной надежности грузоподъемного стола.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326047C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326048C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2401795C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381987C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385285C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |

Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам. Стол содержит основание и подвижную платформу. Основание и подвижная платформа связаны между собой перекрещивающимися рычагами типа «Нюрнбергские ножницы». Одни концы рычагов шарнирно закреплены на основании и подвижной платформе. Другие концы этих же рычагов посредством опор качения размещены с возможностью перемещения в направляющих, соответственно размещенных на подвижной платформе и основании. Стол имеет привод подъема, который включает основную и дополнительную гайки, основной и дополнительный ходовые винты, зубчатый редуктор и его электродвигатель. Дополнительный винт смонтирован соосно и оппозитно основному. Оси симметрии винтов совмещены с осями шарниров нижних концов первой пары рычагов и посредством подшипников опор размещены на основании. Каждая гайка имеет соосные разноориентированные цапфы. Опоры качения нижних концов другой пары рычагов соединены с общей осью, на которой смонтированы буксы, имеющие подшипники скольжения и разноориентированные цапфы для шарнирного соединения с тягами. Пары тяг соединены с основной и дополнительной гайками через разноориентированные цапфы последних с возможностью размещения этих тяг либо параллельно, либо по сторонам равнобокой трапеции. Изобретение позволяет обеспечить повышение грузоподъемности, технической и эксплуатационной надежности. 1 з.п. ф-лы, 5 ил.
| Грузоподъемный стол | 1986 |
|
SU1401006A1 |
| СПОСОБ ОЧИСТКИ ГАЗОВ | 1971 |
|
SU342488A1 |
| ДВУСТВОЛЬНЫЙ ПАКЕР И УСТРОЙСТВО ДЛЯ ГЕРМЕТИЗАЦИИ КАБЕЛЯ, ПРОХОДЯЩЕГО МЕЖДУ ВНЕШНИМ И ВНУТРЕННИМ СТВОЛАМИ ПАКЕРА | 2017 |
|
RU2661927C1 |
| Способ получения высокотемпературных смазок | 1959 |
|
SU131433A1 |
| DE 4106371 А1, 03 | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |

