19
п
4
О
о:)
Изобретение относится к подъемно- транспортному оборудованию, в частности к грузоподъемным столам.
Цель изобретения - снижение габа- ритов в ниж;нем положении гтлатформы и повьшение надежности.
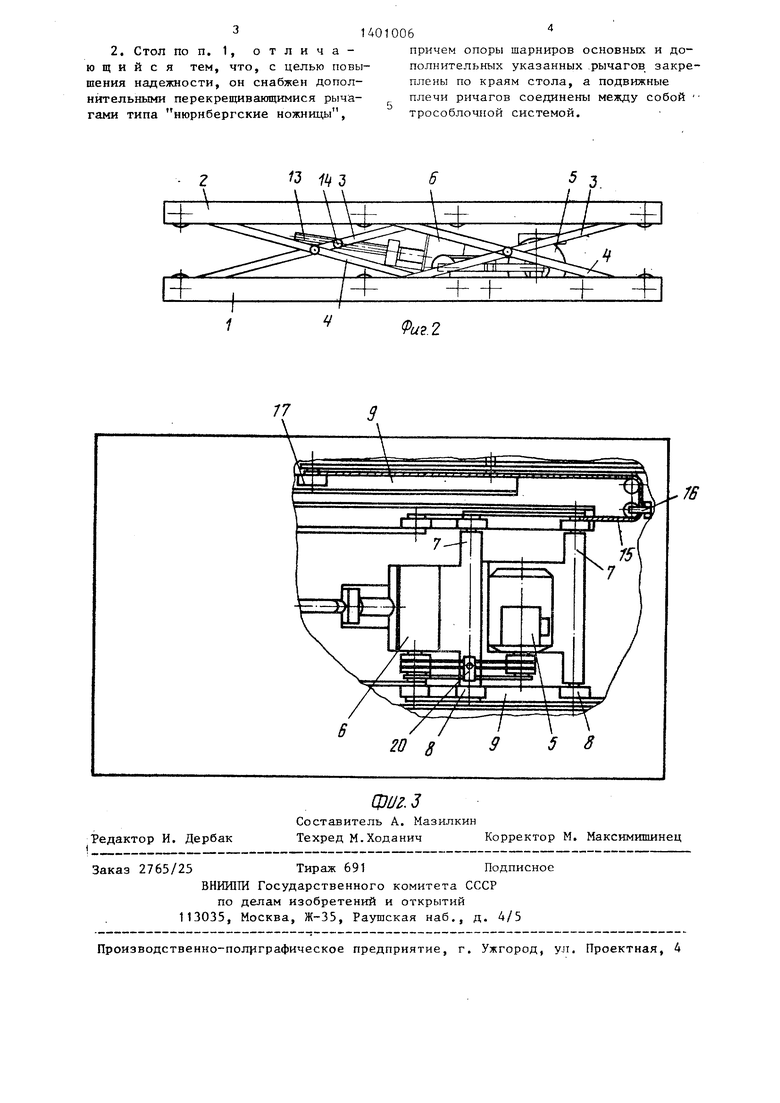
На фиг. 1 изображен грузоподъем ный стол, общий вид, в верхнем рабочем положении; на фиг. 2 - то же, в нижнем рабочем положении; на фиг.З- то же,, вид сверху.
Грузоподъемный стол состоит из основания 1,, сое,циненного с подвижной платформой 2 двумя парами рычажно- шарнирных механизмов, состоящий из перекрещивакяцихся рычагов 3 и 4 типа нюрнбергские ножницы. На основании 1 расположены электродвигатель 5 и редуктор 6, размещенные на двух от- дельш 1х рамах 7, имекщих оси, снабженные роликовыми опорами 8, переме- щанщимися по направлякнцим 9, установленным на основании 1 Рамы 7 связаны между собой и с нижним плечом рычагов 3 тягами 10-12. Подъем подвижной платформы 2 производится с щью ходового винта 13 винтовой передачи, передакядего усилие от редуктора 6 к верхнему плечу рычагов 3 через гайку 14. Нижние плечи рлчагов 3 и 4 связаны между собой цепью 15 через системы роликов с натяжными устройствами 16. Перемещающиеся концы рычагов 3 и 4 снае)жены роликовыми опорами 17 и перемещгштся по направляницим 9 и 18. Неподвижные концы рычагов 3 и 4 закреплены в шарнирных опорах 19. На верхней тяге 12 расположено натязк- ное устройство 20 для обеспечения постоянства натяжения механической передачи от двигателя к редуктору.
Устройство работает следующим образом.
После установки груза на подвиж- ную платформу 2 включается электродвигатель 5, передающий через редуктор 6 вращение на винт 13. Последний передает усилие через гайку 14 на рычаги 3, перемещая роликовые опоры 17 рычагов механизмов 3 по направляющим 9 и 18, тем самым поднимая платформу
2.
По мере подъема платформы 2 роликовые опоры 8 рам 7 посредством нижних тяг 10 и 11 перемещаются по направ- ляюп;им 9. Электродвигатель 5 и редуктор 6 синхронно поворачиваются вокруг осей вращения рам 7 вследствие перемещения гайки 14. Тяги 11 и 12, образуя две противоположные стороны ггодвижного параллелограмма, сохраняют межцентровое расстояние между валами электродвигателя 5 и редуктора 6 постоянным, обеспечивая тем самым постоянство натяжения гибкого звена от двигателя к редуктору. Необходимое натяжение цепной передачи от двигателя к редуктору обеспеч:-шается натяжным устройством 20, компенси рующим погрешности при изготовлении и сборке. По мере перемещения рычагов 3 цепи 15, соединяющие рычаги 3 и 4 через системы роликов с натяжными устройствами 16, вынуждают перемещаться по направляющим 9 и 18 роликовые опоры 17 перемещающихся концов рычагов второй пары, что обеспечивает параллельный подъем платформы 2 относительно основания 1.
Формула изобретения
1. Грузоподъемный стол, содержащий основание и подвижную платформу, шарнирно связанные между собой перекрещивающимися рвз1чагами типа нюрнбергские ножницы, и привод подъема, включанщий в себя ходовой винт, смонтированный в корпусе зубчатого редуктора, зацепленный с гайкой, шарнирно смонтированной на-плече одного из рычагов, и двигатель, связанный передачей с гибким бесконечным звеном с редуктором, отличающий- с я тем, что, с целью снижения габаритов в нижнем положении платфор- мь, редуктор и двигатель закреплены на соответствующих рамах, каждая из которых снабжена шарниром, который с возможностью возвратно-поступательного движения смонтирован в соответствующей направляющей, причем направляющие выполнены в основании, а рамы связаны между собой верхними и нижними шарнирными тягами, верхняя из которых параллельна линии, прходящей noi нормали через оси валов редуктора и двигателя, и равна расстоянию между ними, а шарниры нижней тяги соос- ны с осями шарниров рам, причем обеими рамами и тягами образован шар- нирно-рычажный параллелогрс1ммный че- тырехзвенник, нижняя тяга связана с рижним плечом другого рычага, а гайка - с верхним плечом одного рычага.
2. Стол по п. 1, отличающийся тем, что, с целью повышения надежности, он снабжен дополнительными перекрещивающимися рычагами типа нюрнбергские ножницы,
1401006
причем опоры шарниров основных и дополнительных указанных .рычагов, закреплены по краям стола, а подвижные плечи ричагов соединены между собой трособлочной системой.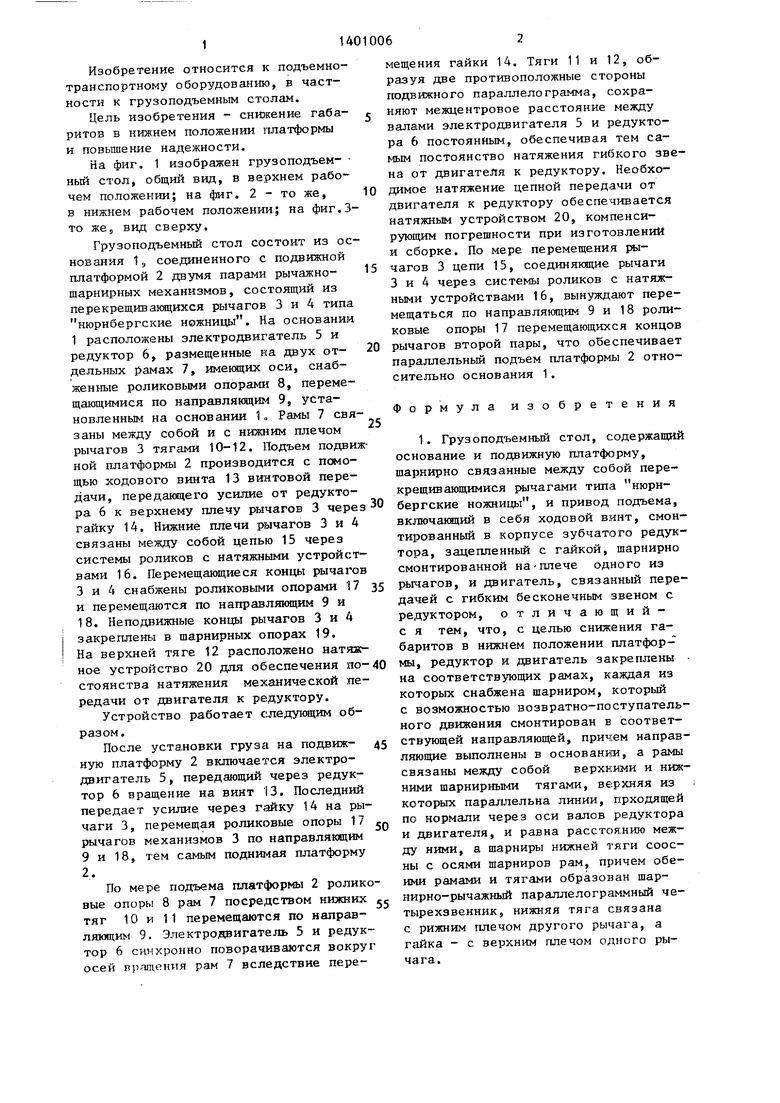
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2329943C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326048C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2326047C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2401795C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам. Цель изобретения - снижение габаритов в нижнем положении платформы и повышение надежности. Изобретение содержит основание 1 и подвижную платформу 2, связанные двумя парами перекрещивакщихся рычагов 3 и 4 типа нюрнбергские ножницы. Привод подъема включает ходовой-винт 13, смонтированный в корпусе редуктора 6, закрепленньш с гайкой 14, шарнирно связанной с плечом одного из рычагов 3, и двигатель 5, передающий вращающий момент к редуктору 6 через цепную передачу. Редуктор 6 и двигатель 5 закреплены на рамах 7, соединенных шарнирами 8 с возможностью поступательного движения в направляющих 9, и связаны между собой верхними и нижними тягами 12 и 11 так, что шарниры верхней тяги 12 соосны осям валов редуктора 6 и двигателя 5, а нижние тяги 11 - осям шарниров 8 рам 7, с образованием обеими рамами и тягами рычажно-шарнирного параллелограммного четырехзвенника. Нижняя тяга 10 связана с нижним плечом рычага 4. Нижние плечи рычагов 3 и 4 каждой пары соединены между собой посредством тро- соблочной системы. 1 з.п.ф-лы-, 3 ил. а (Л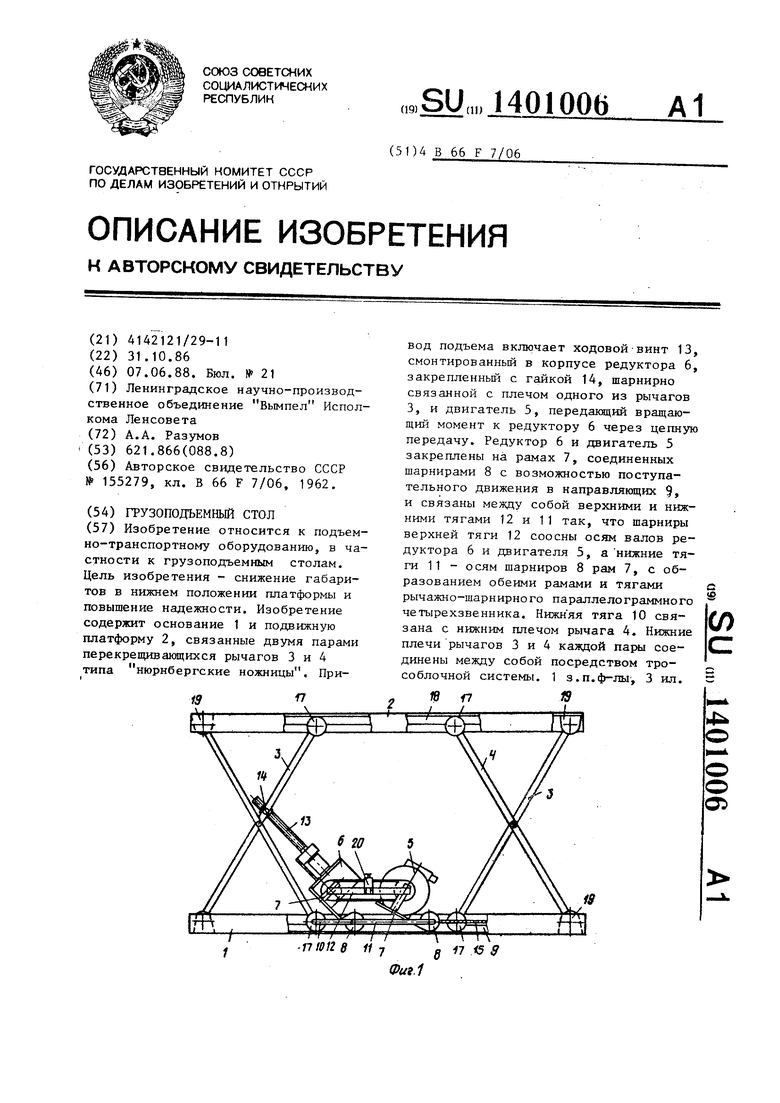
77 Л
Редактор И. Дербак
Составитель А. Мазилкин
Техред М.ХоданичКорректор М. Максимишинец
U2.2
7S
5 8
Фиг.з
| 0 |
|
SU155279A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
