Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам.
Известен грузоподъемный стол, содержащий основание и подвижную платформу, шарнирно связанные между собой перекрещивающимися рычагами типа «Нюрнбергские ножницы», и привод подъема, включающий в себя ходовой винт, смонтированный в корпусе зубчатого редуктора, зацепленный с гайкой, шарнирно смонтированной на плече одного из рычагов, и двигатель, связанный передачей гибким бесконечным звеном с редуктором, в котором с целью снижения габаритов в нижнем положении платформы редуктор и двигатель закреплены на соответствующих рамах, каждая из которых снабжена шарниром, который с возможностью возвратно-поступательного движения смонтирован в соответствующей направляющей, причем направляющие выполнены в основании, а рамы связаны между собой верхними и нижними шарнирными тягами, верхняя из которых параллельна линии, проходящей по нормали через оси валов редуктора и двигателя, и равна расстоянию между ними, а шарниры нижней тяги соосны с осями шарниров рам, причем обеими рамами и тягами образован шарнирно-рычажный параллелограммный четырехзвенник, нижняя тяга связана с нижним плечом другого рычага, а гайка - с верхним плечом одного рычага; с целью повышения надежности он снабжен дополнительными перекрещивающимися рычагами типа «Нюрнбергские ножницы», причем опоры шарниров основных и дополнительных указанных рычагов закреплены по краям стола, а подвижные плечи рычагов соединены между собой трособлочной системой (SU, авторское свидетельство №1401006 А1, М. кл.4 B66F 7/06, 07.06.1988).
К недостаткам описанного грузоподъемного стола относятся сложность конструкции раздвижного привода и низкая эксплуатационная надежность подъема грузов в верхнем положении грузовой платформы из-за плоскопараллельного положения основных и дополнительных пар перекрещивающихся рычагов.
Известно также устройство для установки вил погрузчика, содержащее несущий щит, на котором смонтированы с возможностью оппозитного перемещения вилы, связанные с механизмом их перемещения, в котором с целью повышения производительности труда оно снабжено смонтированным на несущем щите подпружиненным ползуном, подвижным в плоскости перемещения вил, а механизм перемещения выполнен в виде шарнирно-рычажного механизма типа «Нюрнбергские ножницы», крайние шарниры которого соединены с вилами, а средний - с указанным ползуном и со штоком силового гидроцилиндра, который закреплен на одной из вил (SU, авторское свидетельство №1010003 А, М. кл.3 B66F 9/06, 07.04.1983).
К недостаткам описанного устройства относится то, что основание силового гидроцилиндра раздвижного привода связано с концами дополнительных тяг, соединенных шарнирно с концами перекрещивающихся рычагов, низкая надежность фиксации положения вил погрузчика, вызванная параллельным положением рычагов шарнирно-рычажного механизма.
Известен грузоподъемный стол, содержащий основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий, по меньшей мере, два шарнирно соединенных перекрещивающихся рычага, одни концы которых смонтированы в направляющих, закрепленных соответственно на платформе и на основании, с которыми связаны другие концы рычагов, и раздвижной привод в виде силового гидроцилиндра, шток которого снабжен дополнительными тягами и посредством осей соединен с верхними и нижними плечами перекрещивающихся рычагов, смонтированных на платформе и основании, при этом основание силового гидроцилиндра смонтировано на общей оси перекрещивающихся рычагов шарнирно-рычажного механизма (IP, патент №7267595 А, МПК D66F 7/08, B66F 7/06, 17.10.1995, фиг.10).
К недостаткам описанного грузоподъемного стола относятся сложность конструкции раздвижного привода из-за размещения силового гидроцилиндра на общей оси перекрещивающихся рычагов, невозможность фиксации грузовой платформы и низкая устойчивость грузовой платформы в крайнем верхнем положении над основанием.
Наиболее близким аналогом к заявленному объекту является грузоподъемный стол, содержащий основание и подвижную платформу, шарнирно связанные между собой основными и дополнительными парами перекрещивающихся рычагов типа «Нюрнбергские ножницы», с закрепленными опорами шарниров основных и дополнительных рычагов по краям основания и подвижной платформы, свободные концы перекрещивающихся рычагов имеют ролики, перемещающиеся в направляющих основания и подвижной платформы, в шарнирах сопряжения перекрещивающихся рычагов основной и дополнительной пар установлены общие оси, привод подъема подвижной платформы в виде силового гидроцилиндра и блокиратор аварийного перемещения подвижной платформы, в котором каждая пара перекрещивающихся рычагов снабжена четырьмя тягами, размещенными по сторонам дельтоида, имеющего одну ось симметрии, на которой размещен силовой гидроцилиндр подъема подвижной платформы, при этом его шток пальцем соединен с концами коротких тяг упомянутого дельтоида, а основание связано осью с концами длинных тяг этого дельтоида, причем каждая пара из упомянутых короткой и длинной тяг посредством оси зафиксирована на верхнем и нижнем плечах перекрещивающихся рычагов; каждый силовой гидроцилиндр выполнен короткоходовым; блокиратор аварийного перемещения подвижной платформы в ее крайнем верхнем положении образован упомянутыми короткими тягами при втягивании штока в полость силового гидроцилиндра и вертикальном размещении этих тяг между верхними и нижними плечами перекрещивающихся рычагов; блокиратор аварийного перемещения подвижной платформы в ее крайнем нижнем положении образован канатом, концы которого соединены с осями в основаниях силовых гидроцилиндров, кинематически связанных с основной и дополнительной парами перекрещивающихся рычагов (RU, патент №2335454 С1, МПК B66F 7/08 (2006.01), B66F 3/22 (2006.01). Грузоподъемный стол / A.M.Салдаев (RU), А.А.Криволуцкий (RU), Н.В.Криволуцкая (RU), Т.В.Майер (RU), Н.В.Кривельская (RU). - Заявка №2007117966/11; Заявлено 14.05.2007; Опубл. 10.10.2008, Бюл. №28 // Изобретения. Полезные модели. - 2008. - №28).
К недостаткам описанного грузоподъемного стола применительно к решаемой нами технической проблеме - повышение устойчивости положения грузовой платформы при любой высоте подъема и упрощение конструкции раздвижного привода - относятся сложность конструкции и, несмотря на наличие четырех пар перекрещивающихся рычагов, неустойчивое положение грузовой платформы при ее крайнем верхнем положении над основанием.
Сущность заявленного изобретения заключается в следующем.
Задача, на решение которой направлено заявленное изобретение, - повышение устойчивости положения грузовой платформы при любой высоте подъема и упрощение конструкции раздвижного привода грузоподъемного стола.
Технический результат - повышение эксплуатационной надежности подъема грузов.
Указанный технический результат достигается тем, что в известном грузоподъемном столе, содержащем основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий две пары шарнирно соединенных перекрещивающихся рычагов, концы которых смонтированы в направляющих, закрепленных соответственно на грузовой платформе и на основании, и раздвижной привод в виде оппозитно установленных силовых гидроцилиндров и тяги, согласно изобретению пары шарнирно соединенных перекрещивающихся рычагов установлены в вертикальных пересекающихся взаимно-перпендикулярных плоскостях и соединены шарниром, выполненным в виде кольца и смонтированной в соосных отверстиях в диаметральной плоскости кольца общей оси, первая пара перекрещивающихся рычагов посредством втулок смонтирована на внешней поверхности кольца, вторая пара перекрещивающихся рычагов посредством втулок смонтирована на общей оси внутри кольца, раздвижной привод снабжен второй парой силовых гидроцилиндров, при этом силовые гидроцилиндры первой пары основаниями и упомянутых тяг соединены посредством цапф с верхним и нижним плечами перекрещивающихся рычагов второй пары этих рычагов, силовые гидроцилиндры второй пары связаны с верхним и нижним плечами перекрещивающихся рычагов первой пары этих рычагов, причем между рычагами второй пары на указанной общей оси посредством сайлентблока с возможностью демонтажа соединены штоки первой пары силовых гидроцилиндров, а в резьбовых отверстиях на торцах общей оси зафиксированы штоки второй пары силовых гидроцилиндров; конструкция грузовой платформы выполнена идентичной конструкции основания; верхние концы пар перекрещивающихся рычагов посредством опор качений размещены в направляющих грузовой платформы; нижние концы пар перекрещивающихся рычагов посредством опор качений размещены в направляющих основания; каждая направляющая снабжена плоскостью разъема, а ее отъемная часть средствами крепления зафиксирована на неподвижной части; каждая опора качения посредством радиальных подшипников качения разовой смазки размещена на цапфе, смонтированной на каждом конце перекрещивающегося рычага, при этом на опоре качения выполнена кольцевая канавка для размещения в овальном горизонтальном пазе направляющей; длина общей оси шарнира выполнена больше диаметра буртика на поверхности кольца, при этом упомянутая общая ось в соосных отверстиях в диаметральной плоскости кольца зафиксирована стопорными кольцами; осевое смещение каждого рычага на посадочной поверхности кольца шарнира ограничено плоскими полукольцами, размещенными в кольцевой канавке на посадочной поверхности, а упомянутые полукольца средствами крепления зафиксированы на боковине каждого рычага; между кольцевыми канавками и торцами общей оси шарнира выполнены лыски под размер зева рожкового ключа; на торцах кольца шарнира в резьбовых отверстиях размещены пресс-масленки для подачи консистентной смазки на посадочные поверхности кольца; каждая тяга посредством цапфы размещена на внешней боковине перекрещивающегося рычага; каждый свободный конец тяги посредством кронштейна соединен с гильзой силового гидроцилиндра; штоковые и бесштоковые полости гильзы силовых гидроцилиндров параллельно гидравлически соединены в гидравлическую сеть гидростанции грузоподъемного стола; в отверстиях грузовой платформы размещены рым-болты; основание снабжено монтажными отверстиями под анкерные болты.
Изобретение поясняется чертежами.
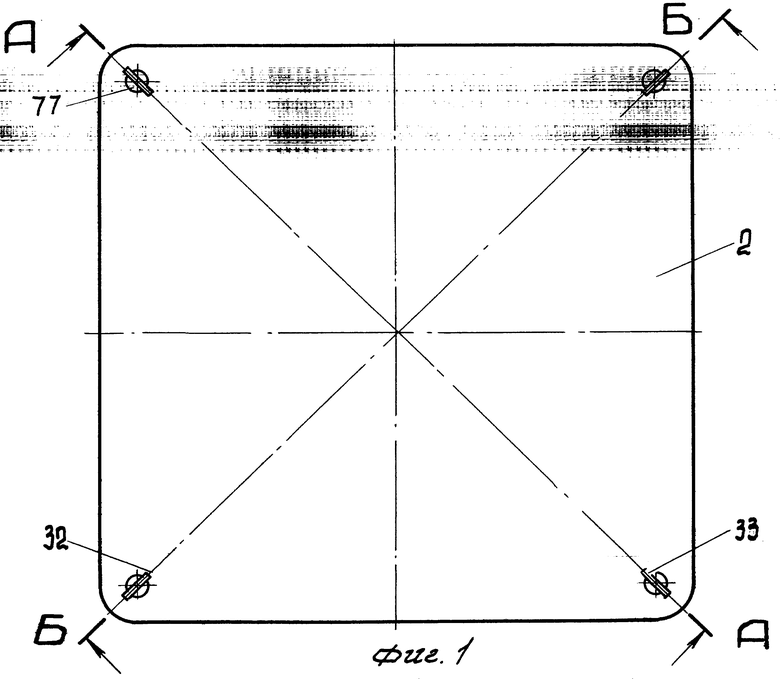
На фиг.1 изображен грузоподъемный стол, вид в плане.
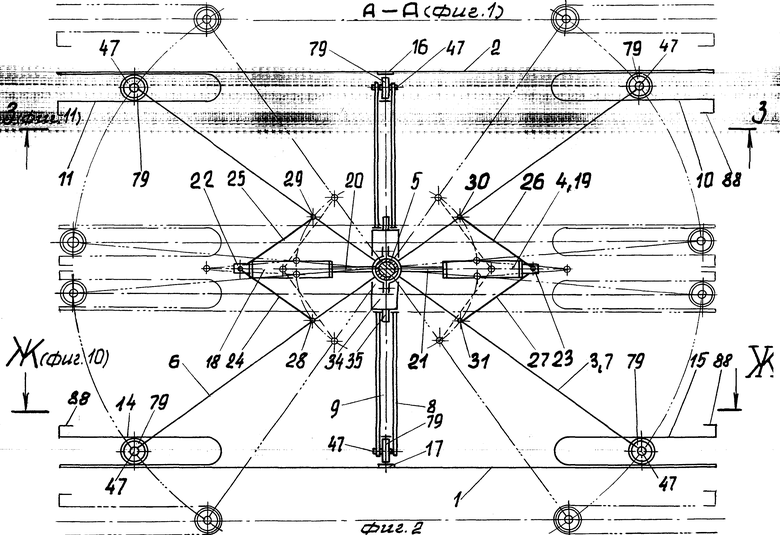
На фиг.2 - сечение А-А на фиг.1, вертикальный разрез грузоподъемного стола по первой диагонали грузовой платформы.
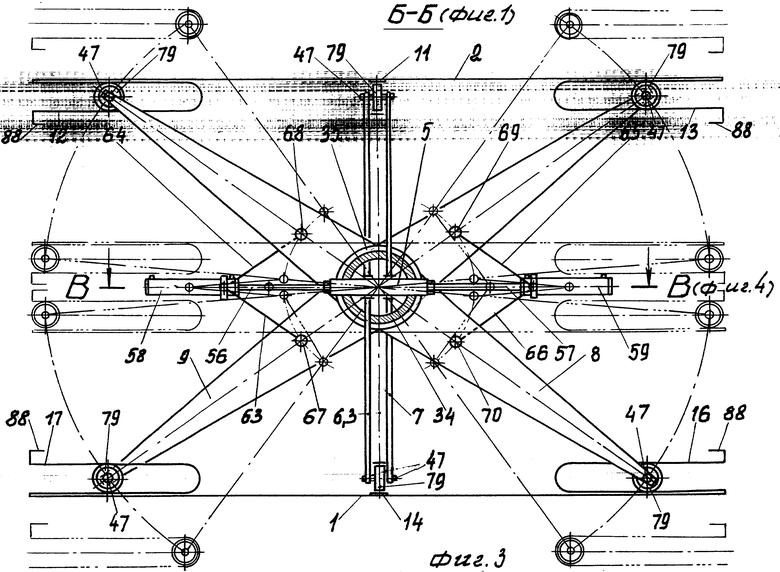
На фиг.3 - сечение Б-Б на фиг.1, вертикальный разрез грузоподъемного стола по второй диагонали грузовой платформы.
На фиг.4 - сечение В-В на фиг.3, горизонтальное сечение гидропривода первой пары и второй пары перекрещивающихся рычагов.
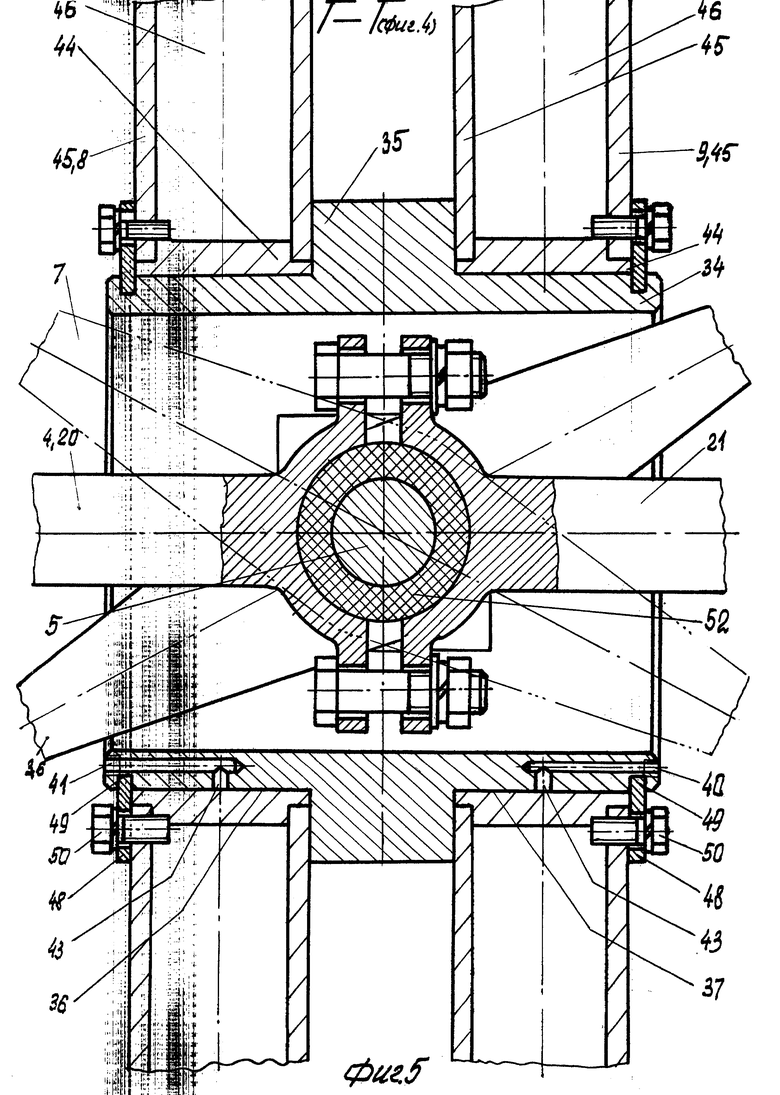
На фиг.5 - сечение Г-Г на фиг.4, вертикальное сечение концов штоков гидропривода второй пары перекрещивающихся рычагов, установленных оппозитно на общей оси шарнира.
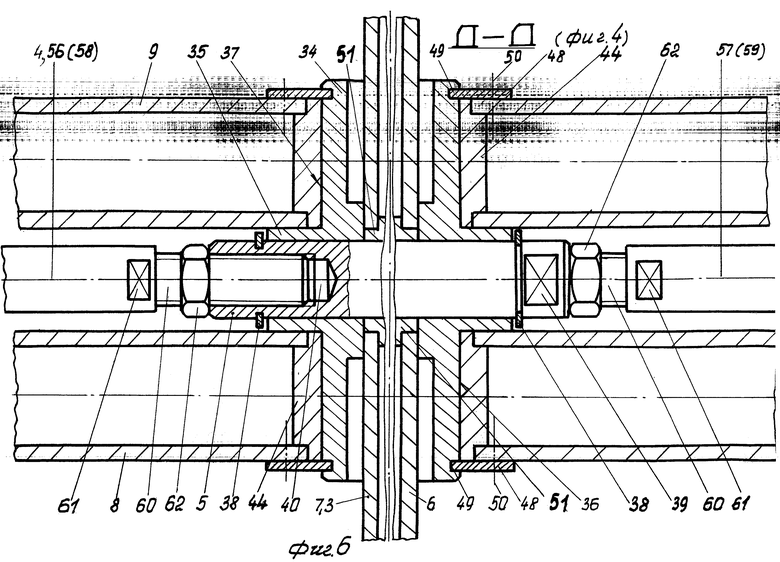
На фиг.6 - сечение Д-Д на фиг.4, сопряжение концов штоков силовых гидроцилиндров гидропривода первой пары перекрещивающихся рычагов.
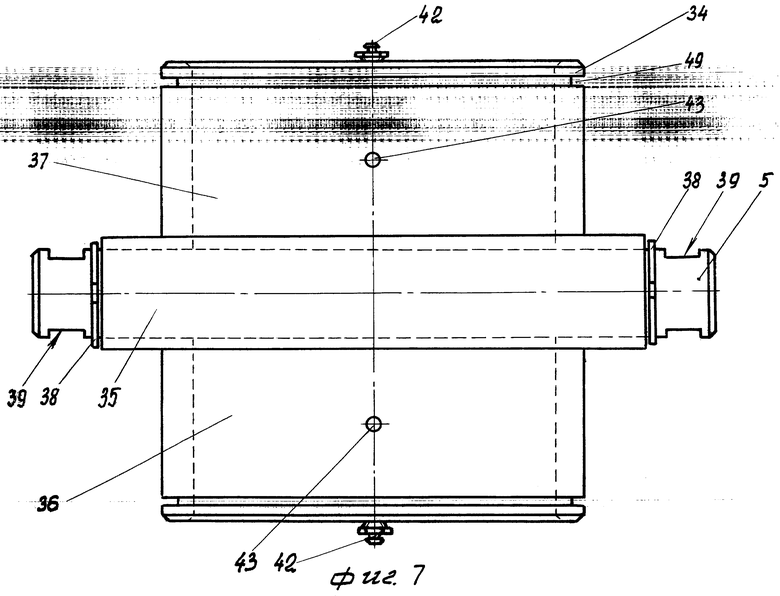
На фиг.7 показан шарнир сопряжения пар перекрещивающихся рычагов, вид в плане.
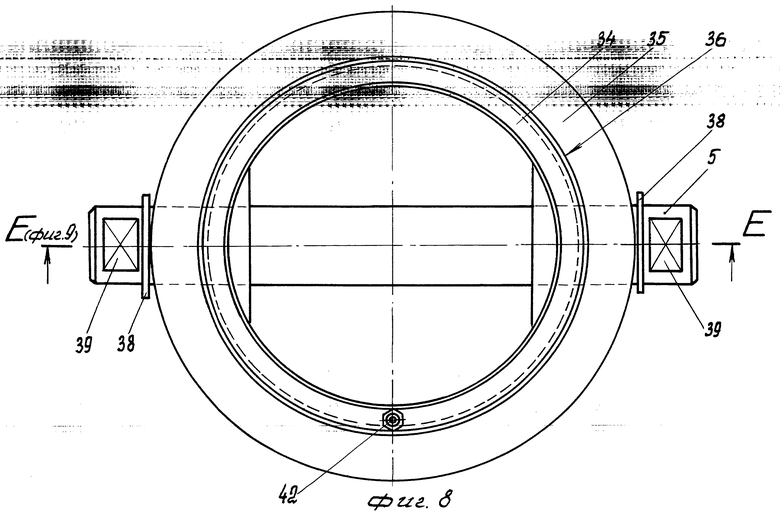
На фиг.8 - то же, вид спереди.
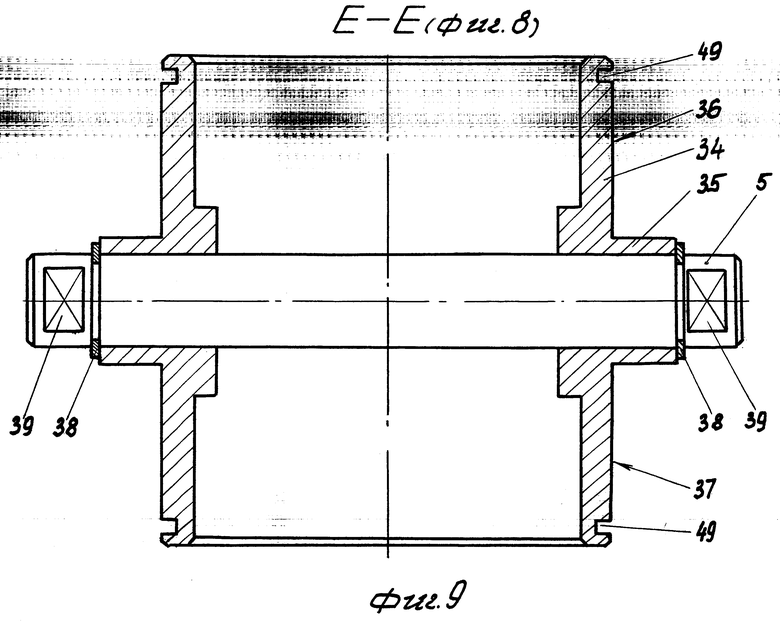
На фиг.9 - сечение Е-Е на фиг.8, горизонтальный разрез шарнира.
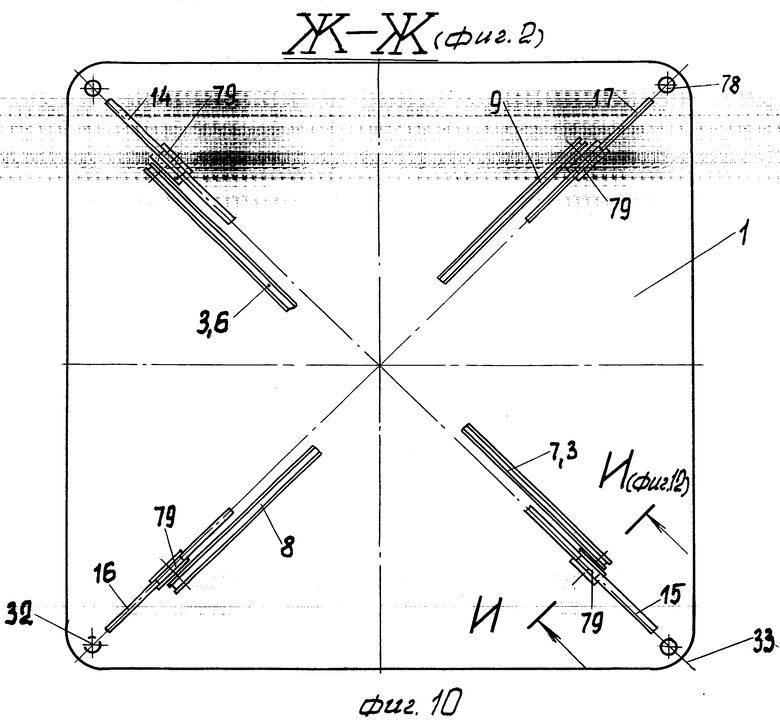
На фиг.10 изображено сечение Ж-Ж на фиг.2, вид на основание с установленными направляющими нижних концов обеих пар перекрещивающихся рычагов.
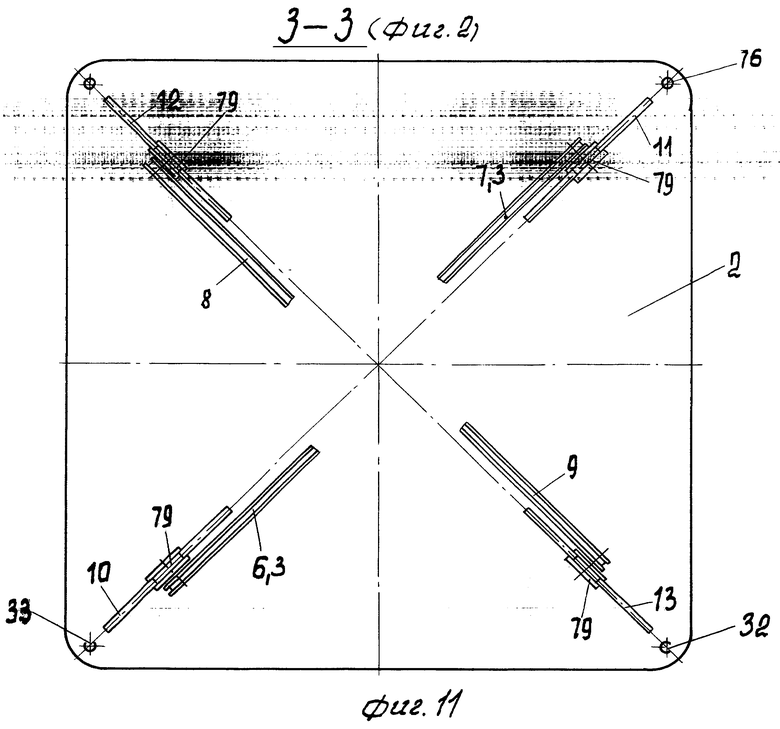
На фиг.11 - сечение З-З на фиг.2, вид на тыльную поверхность грузовой платформы с установленными направляющими верхних концов обеих пар перекрещивающихся рычагов.
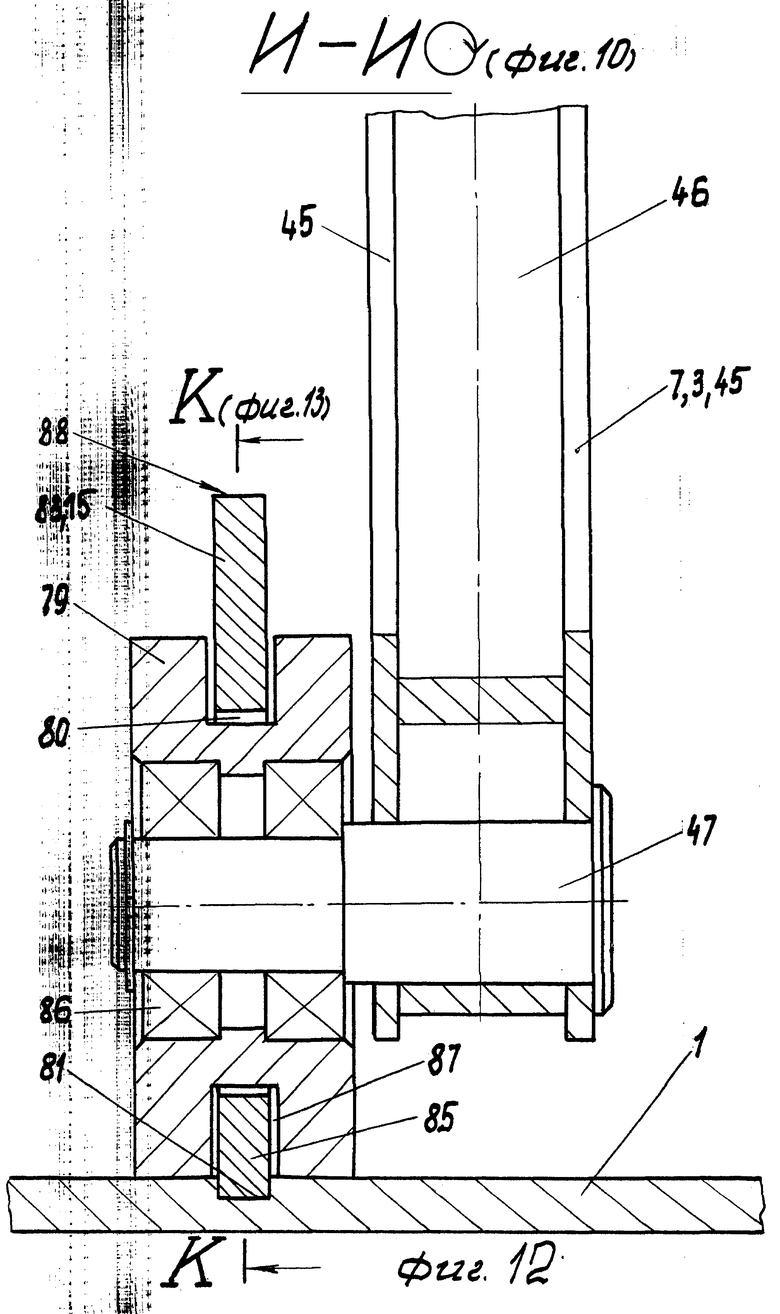
На фиг.12 - сечение И-И на фиг.10, размещение в направляющей опорного ролика на нижнем конце перекрещивающего рычага.
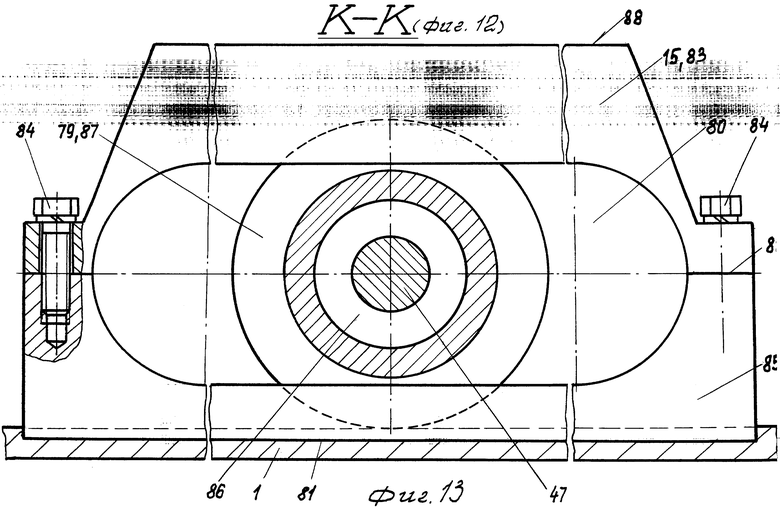
На фиг.13 - сечение К-К на фиг.12, вертикальный разрез направляющей основания.
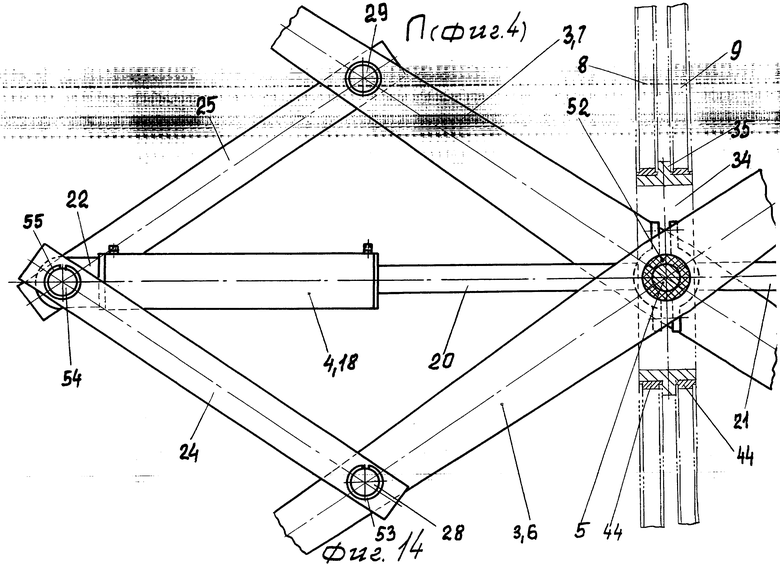
На фиг.14 - вид Л на фиг.4, положения дополнительных тяг, силового гидроцилиндра и плеч первой пары перекрещивающихся рычагов.
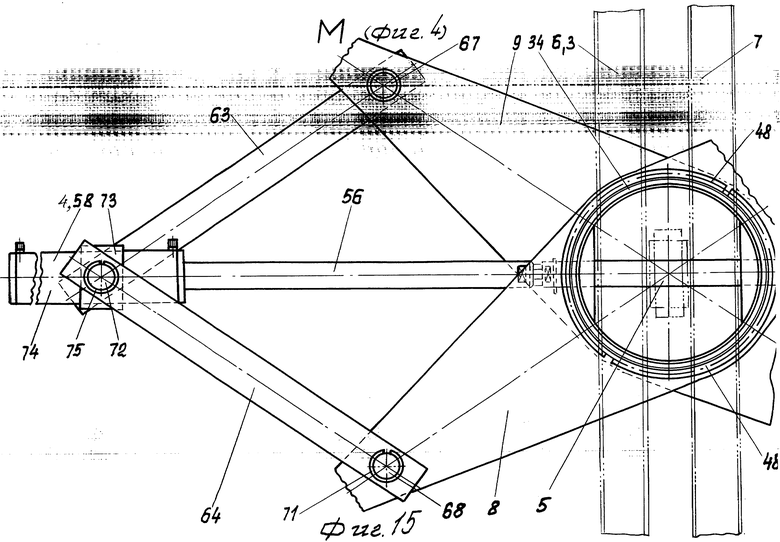
На фиг.15 - вид М на фиг.4, положения дополнительных тяг, силового гидроцилиндра и плеч второй пары перекрещивающихся рычагов.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Грузоподъемный стол (см. фиг.1-15) содержит основание 1, грузовую платформу 2, расположенный между ними шарнирно-рычажный механизм 3 и раздвижной привод 4. Шарнирно-рычажный механизм 3 включает общую ось 5 и две пары шарнирно соединенных перекрещивающихся рычагов 6, 7 и 8, 9. Концы пар перекрещивающихся рычагов 6-9 смонтированы в направляющих 10, 11, 12, 13 и 14, 15, 16, 17, закрепленных соответственно на грузовой платформе 2 и на основании 1. Раздвижной привод 4 выполнен в виде оппозитно установленных силовых гидроцилиндров 18 и 19. Штоки 20 и 21 силовых гидроцилиндров 18 и 19 соединены с общей осью 5. Основания 22 и 23 силовых гидроцилиндров 18 и 19 снабжены тягами 24, 25, 26, 27. Одни концы тяг 24-27 посредством цапф 28, 29, 30, 31 соединены с верхним и нижним плечами перекрещивающихся рычагов 6, 7 и 8, 9.
Пары шарнирно соединенных перекрещивающихся рычагов 6, 7 и 8, 9 установлены в вертикальных пересекающихся взаимно-перпендикулярных плоскостях, следы 32 и 33 которых изображены штрихпунктирными линиями на фиг.1, 10 и 11.
Пары шарнирно соединенных перекрещивающихся рычагов 6, 7 и 8, 9 своими средними частями соединены шарниром 34 (см. фиг.2, 3, 4, 5, 6, 7, 8, 9, 14 и 15). Шарнир 34 выполнен в виде кольца и общей оси 5, имеющими общий геометрический центр. Общая ось 5 смонтирована в соосных отверстиях в диаметральной плоскости кольца шарнира 34. Общая ось 5 в соосных отверстиях кольца установлена по скользящей посадке. Длина общей оси 5 шарнира 34 выполнена больше диаметра буртика 35 между посадочными поверхностями 36 и 37 кольца. Упомянутая общая ось 5 в соосных отверстиях в диаметральной плоскости кольца зафиксирована стопорными кольцами 38 (фиг.6, 7, 8, 9). Между кольцевыми канавками под стопорные кольца 38 и торцами общей оси 5 шарнира 34 выполнены лыски 39 под размер зева рожкового ключа. На торцах общей оси 5 выполнены резьбовые отверстия 40 (фиг.6). На торцах кольца шарнира 34 в резьбовых отверстиях 41 (фиг.5) размещены пресс-масленки 42 для подачи консистентной смазки через радиальные отверстия 43 на посадочные поверхности 36 и 37 кольца (см. фиг.7,8).
Первая пара перекрещивающихся рычагов 8, 9 посредством втулок 44 смонтирована на посадочных поверхностях 36 и 37 кольца шарнира 34, разделенных буртиком 35 на внешней поверхности кольца. Каждый рычаг 6 (7, 8, 9) выполнен из боковин 45, ребер жесткости 46, втулок 44 между боковинами 45 и цапф 47 на концах рычагов 6-9 (см. фиг.4, 5, 6, 7, 8, 9 и 12, 13).
Осевое смещение каждого перекрещивающегося рычага 8 (9) на посадочной поверхности 36 (37) кольца шарнира 34 ограничено с одной стороны буртиком 35, а с другой стороны - плоскими полукольцами 48. Полукольца 48 размещены в кольцевой канавке 49 на посадочной поверхности 36 (37) кольца шарнира 34. Упомянутые полукольца 48 средствами крепления 50 зафиксированы на внешней боковине 45 каждого двуплечего рычага 8 (9) (см. фиг.4, 5, 6, 7, 8, 9, 14, 15).
Вторая пара перекрещивающихся рычагов 6 и 7 посредством втулок 51 (см. фиг.4, 6) смонтирована на общей оси 5 внутри кольца шарнира 34. Между названными рычагами 6 и 7 второй пары на указанной общей оси 5 посредством сайлентблока 52 с возможностью демонтажа соединены штоки 20 и 21 первой пары силовых гидроцилиндров 18 и 19 раздвижного привода 4 (см. фиг.5). Оппозитно смонтированные на общей оси 5 шарнира 34 штоки 20 и 21 силовых гидроцилиндров 18 и 19 размещены между второй парой перекрещивающихся рычагов 6 и 7 (см. фиг.4, 5, 6 и 14).
Для свободного размещения силовых гидроцилиндров 18 и 19 между второй парой перекрещивающихся рычагов каждая тяга 24 (25, 26, 27) посредством цапф 28 (29, 30, 31) размещена на внешней боковине 45 перекрещивающегося рычага 6 (7) и зафиксирована стопорным кольцом 53 (см. фиг.14 и 4). Каждый свободный конец тяги 24 (25, 26, 27) посредством оси 54 соединен с основанием 22 (23) силового гидроцилиндра 18 (19) и зафиксирован от осевого смещения стопорным кольцом 55 (см. фиг.4 и 14).
В резьбовых отверстиях 40 на торцах общей оси 5 зафиксированы оппозитно установленные штоки 56 и 57 второй пары силовых гидроцилиндров 58 и 59 (см. фиг.3, 4, 6 и 15).
Каждый шток 56 (57) (см. фиг.6) имеет резьбовой хвостовик 60 и лыски 61 под размер зева рожкового ключа. Придерживая рожковым ключом за лыски 39 общую ось 5 в его резьбовое отверстие 40 за лыску 61 ввинчивают резьбовой хвостовик 60 штока 56. После выполнения надлежащих регулировочных работ положение резьбового штока 60 на торце оси 5 фиксируют контргайкой 62.
Вторая пара силовых гидроцилиндров 58 и 59 раздвижного привода 4 тягами 63, 64, 65, 66 связана с верхним и нижним плечами первой пары перекрещивающихся рычагов 8 и 9. Одни концы тяг 63-66 посредством цапф 67, 68, 69, 70 соединены с верхними и нижними плечами перекрещивающихся рычагов 8 и 9. Осевые смещения концов тяг 63-66 на цапфах 67-70 ограничены стопорными кольцами 71.
Каждый свободный конец тяги 63 (64, 65, 66) посредством цапфы 72 кронштейна 73 соединен с гильзой 74 силового гидроцилиндра 58 (59). Осевые перемещения концов тяг 63-66 на цапфах 72 ограничены стопорными кольцами 75 (см. фиг.4 и 15). Описанное конструктивное исполнение кинематической связи гильзы 74 силовых гидроцилиндров 58 и 59 с кронштейном 73 позволяет разместить штоки 56 и 57 между боковинами 45 первой пары перекрещивающихся рычагов 8 и 9 и не препятствует угловым перемещениям рычагов 8 и 9 при крайнем нижнем положении грузовой платформы 2 над основанием 1.
Конструкция грузовой платформы 2 выполнена идентичной конструкции основания 1. В отверстиях 76 (фиг.11) грузовой платформы 2 размещены рым-болты 77 (см. фиг.1 и 11). Основание 1 снабжено монтажными отверстиями 78 под анкерные болты (см. фиг.10).
Верхние концы пар перекрещивающихся рычагов 6, 7 и 8, 9 посредством опор 79 качений (см. фиг.2, 3, 11, 12, 13) размещены в направляющих 10, 11, 12, 13 грузовой платформы 2.
Нижние концы пар перекрещивающихся рычагов 6, 7 и 8, 9 посредством опор 79 качений размещены в направляющих 14, 15, 16 и 17 основания 1 (см. фиг.2, 3, 10, 12, 13). Каждая направляющая 10-13 грузовой платформы 2 и каждая направляющая 14-17 основания 1 выполнена в виде вертикально установленного плоского ребра с овальным горизонтальным пазом 80 (см. фиг.12 и 13). Одна из кромок плоского ребра установлена в пазу 81 либо основания 1, либо грузовой платформы 2. Каждая направляющая 10-13 и 14-17 снабжена плоскостью разъема 82. Отъемная часть 83 направляющих 10-13 и 14-17 средствами крепления 84 зафиксирована на неподвижной части 85, соединенной сварными швами или на основании 1, или на грузовой платформе 2.
Каждая опора 79 качения посредством радиальных подшипников 86 разовой смазки размещена на цапфе 47 на каждом конце перекрещивающихся рычагов 6, 7 и 8, 9. На опоре 79 качения выполнена кольцевая канавка 87 (см. фиг.12 и 13) для размещения в овальном горизонтальном пазу 80 направляющей 10 (11-13, 14-17). Описанная конструкция кинематической связи опор 79 качений на верхних и нижних концах перекрещивающихся рычагов 6, 7 и 8, 9 обеспечивает высокую эксплуатационную надежность положения грузовой платформы 2 с поднимаемыми грузами над основанием 1.
При крайнем нижнем положении грузовой платформы 2 над основанием 1 плоские грани 88 отъемных частей 83 направляющих 10-13 грузовой платформы 2 сопряжены с плоскими гранями 88 отъемных частей 83 направляющих 14-17 основания 1.
При крайнем нижнем положении грузовой платформы 2 над основанием 1 минимальный габарит стола диктуется диаметром буртика 35 кольцами шарнира 34 и самой широкой частью боковин 45 на втулках 44 рычагов 8 и 9. При крайнем нижнем положении грузовой платформы 2 над основанием 1 пары рычагов 6, 7 и 8, 9 имеют возможность горизонтальной укладки. Синхронность угловых перемещений перекрещивающихся рычагов 6, 7 на общей оси 5 и перекрещивающихся рычагов 8, 9 на посадочных поясках 36 и 37 кольца шарнира 34 достигается не только кинематической связью между тягами 24, 25, 26, 27 с плечами рычагов 6, 7 и тягами 63, 64, 65, 66 с плечами рычагов 8, 9, но и тем, что штоковые и бесштоковые полости гильз 74 силовых гидроцилиндров 18, 19 и 58, 59 раздвижного привода 4 параллельно гидравлически соединены в гидравлическую сеть гидростанции грузоподъемного стола.
Грузоподъемный стол работает следующим образом.
Работу стола рассмотрим на примере подъема грузовой платформы 2 над основанием 1. При подаче рабочей жидкости по гибким рукавам высокого давления от гидростанции в штоковые полости гильз 74 силовых гидроцилиндров 58, 59 и 18, 19 их штоки 56, 57 и 19, 20 остаются неподвижными, так как все четыре указанных штока 56, 57 и 19, 20 закреплены на общей оси 5: два штока на торцах общей оси 5 и два через сайлентблок 52 на цилиндрической поверхности общей оси 5. При перемещении гильз 74 в сторону общей оси 5 штоки 20, 21 силовых гидроцилиндров 18, 19 и штоки 56, 57 силовых гидроцилиндров 58, 59 испытывают растягивающие усилия, оставаясь неподвижными относительно общей оси 5.
Рассмотрим перемещение оснований 22 и 23 первой пары силовых гидроцилиндров 18 и 19 раздвижного привода 4 на штоках 20 и 21 в направлении общей оси 5. Осью 54 в основании 22, тягами 24 и 25 через цапфы 28 и 29 нижнее плечо рычага 6 и верхнее плечо рычага 7 посредством втулок 51 (см. фиг.4 и 6) синхронно поворачиваются в разные стороны на общей оси 5. Эти угловые перемещения второй пары перекрещивающихся рычагов 6 и 7 поддерживают тяги 26 и 27. Одни концы рычагов 26 и 27 посредством цапф 30 и 31 шарнирно соединены с верхним плечом рычага 6 и нижним плечом рычага 7. Другие концы тяг 26 и 27 и осью 54 соединены с основанием 23 силового гидроцилиндра 19. В реальных условиях не существует силовых гидроцилиндров 18, 19, развивающих одинаковые усилия на концах штоков 20 и 21. Размещение силовых гидроцилиндров 18 и 19 по диагоналям кинематически связанных ромбов (см. фиг.2), образованных плечами рычагов 6, 7 и тягами 24, 25 и 26, 27, позволяет суммировать усилия силовых гидроцилиндров 18, 19 на указанных штоках 20 и 21. Нижние концы рычагов 6 и 7 посредством цапф 47 и опор 79 качений перемещаются в направляющих 14 и 15 основания 1 в сторону его средней части. Одновременно с этим верхние концы рычагов 6 и 7 посредством цапф 47 и опор 79 качений перемещаются в направляющих 10 и 11 в сторону середины грузовой платформы 2. Линейные перемещения опор 79 качений в направляющих 14 и 15 основания 1 и в направляющих 10 и 11 грузовой платформы 2 привели к вертикальному смещению общей оси 5 с шарниром 34 над основанием 1 и в два раза более быстрому подъему грузовой платформы 2 над основанием 1.
Одновременно с этим угловые перемещения рычагов 6, 7 на общей оси 5 и линейные перемещения опор 79 в направляющих 14 и 15, 10 и 11 привели к перемещениям первой пары перекрещивающихся рычагов 8, 9.
При поступлении рабочей жидкости в штоковые полости гильз 74 силовых гидроцилиндров 58, 59 кронштейны 73 с цапфами 72 начинают линейные перемещения вдоль штоков 56 и 57 в направлении контргаек 62 на торцах оси 5 (см. фиг.6). Эти линейные перемещения гильз 74 с кронштейнами 73 и цапфами 72 привели к тому, что парами тяг 63 и 64 нижнее плечо рычага 9 и верхнее плечо рычага 8 поворачиваются посредством втулок 44 (см. фиг.16 и 14) на посадочных поясках кольца шарнира 34. Одновременно с этим процессу подъема способствует усилие, развиваемое гильзой 74 и кронштейном 73 силового гидроцилиндра 59 (см. фиг.4). Перемещение цапф 72 на боковых поверхностях кронштейна 73 (см. фиг.3) приводит к тому, что тягами 65 и 66 верхнее плечо рычага 9 и нижнее плечо перекрещивающегося рычага 8 поворачиваются на посадочных поясках 36 и 37 шарнира 34. Таким образом, усилия силовых гидроцилиндров 58, 59 суммируются и приводят к синхронному повороту двуплечих перекрещивающихся рычагов 8, 9 на шарнире 34. Одновременно с этим цапфы 79 на нижних и верхних концах рычагов 8, 9 посредством опор 79 качений перемещаются вдоль направляющих 16 и 17 основания 1 и вдоль направляющих 12 и 13 грузовой платформы 2. Все это в целом приводит к вертикальному подъему шарнира 34 над основанием 1, а грузовой платформы 2 - над ними.
Размещение пар направляющих 14, 15 и 16, 17 основания 1 и пар направляющих 10, 11 и 12, 13 грузовой платформы 2 (см. фиг.2, 3 и 10, 11) в двух вертикальных взаимно перпендикулярных и пересекающихся плоскостях и опор 73 качений на нижних и верхних концах рычагов 6 и 7 исключает любые боковые смещения грузовой платформы 2 над основанием 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381987C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385285C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361808C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381986C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2381985C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407695C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2009 |
|
RU2407694C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2006 |
|
RU2329943C1 |

Изобретение относится к подъемно-транспортному оборудованию, в частности к грузоподъемным столам. Стол содержит основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм и раздвижной привод. Указанный механизм включает две пары шарнирно соединенных перекрещивающихся рычагов. Концы рычагов смонтированы в направляющих, закрепленных соответственно на грузовой платформе и на основании. Раздвижной привод выполнен в виде оппозитно установленных силовых гидроцилиндров. Пары шарнирно соединенных перекрещивающихся рычагов установлены в вертикальных пересекающихся взаимно-перпендикулярных плоскостях. Обе пары перекрещивающихся рычагов соединены шарниром, выполненным в виде кольца и общей оси. Последняя смонтирована в соосных отверстиях в диаметральной плоскости кольца. Первая пара перекрещивающихся рычагов посредством втулок смонтирована на посадочных поверхностях между буртиком на внешней поверхности кольца. Вторая пара перекрещивающихся рычагов посредством втулок смонтирована на общей оси внутри кольца. Между названными рычагами второй пары на указанной оси посредством сайлентблока с возможностью демонтажа соединены штоки первой пары силовых гидроцилиндров. В резьбовых отверстиях на торцах общей оси зафиксированы штоки второй пары силовых гидроцилиндров. Стол обеспечивает надежность подъема грузов при любом положении грузовой платформы над основанием. 16 з.п. ф-лы, 15 ил.
1. Грузоподъемный стол, содержащий основание, грузовую платформу, расположенный между ними шарнирно-рычажный механизм, включающий две пары шарнирно соединенных перекрещивающихся рычагов, концы которых смонтированы в направляющих, закрепленных соответственно на платформе и на основании, и раздвижной привод в виде пары оппозитно установленных силовых гидроцилиндров, и тяги, отличающийся тем, что пары шарнирно соединенных перекрещивающихся рычагов установлены в вертикальных пересекающихся взаимно-перпендикулярных плоскостях и соединены шарниром, выполненным в виде кольца и смонтированной в соосных отверстиях в диаметральной плоскости кольца общей оси, при этом первая пара перекрещивающихся рычагов посредством втулок смонтирована на посадочных поверхностях на внешней поверхности кольца, вторая пара перекрещивающихся рычагов посредством втулок смонтирована на общей оси внутри кольца, раздвижной привод снабжен второй парой силовых гидроцилиндров, при этом силовые гидроцилиндры первой пары основаниями и одними из упомянутых тяг соединены посредством цапф с верхним и нижним плечами перекрещивающихся рычагов второй пары этих рычагов, силовые гидроцилиндры второй пары связаны с верхним и нижним плечами перекрещивающихся рычагов первой пары этих рычагов, причем между рычагами второй пары на указанной оси посредством сайлентблока с возможностью демонтажа установлены штоки первой пары силовых гидроцилиндров, а в резьбовых отверстиях на торцах общей оси зафиксированы штоки второй пары силовых гидроцилиндров.
2. Стол по п.1, отличающийся тем, что конструкция грузовой платформы выполнена идентичной конструкции основания.
3. Стол по п.1, отличающийся тем, что верхние концы пар перекрещивающихся рычагов посредством опор качений размещены в направляющих грузовой платформы.
4. Стол по п.1, отличающийся тем, что нижние концы пар перекрещивающихся рычагов посредством опор качений размещены в направляющих основания.
5. Стол по п.1, отличающийся тем, что каждая направляющая выполнена в виде вертикально установленного плоского ребра с овальным горизонтальным пазом.
6. Стол по п.1, отличающийся тем, что каждая направляющая снабжена плоскостью разъема, а ее отъемная часть средствами крепления зафиксирована на неподвижной части.
7. Стол по п.1, отличающийся тем, что каждая опора качения посредством радиальных подшипников качения разовой смазки размещена на цапфе, смонтированной на каждом конце перекрещивающегося рычага, при этом на опоре качения выполнена кольцевая канавка для размещения в овальном горизонтальном пазу направляющей.
8. Стол по п.1, отличающийся тем, что длина общей оси шарнира выполнена больше диаметра буртика между посадочными поверхностями кольца, при этом на опоре качения выполнена кольцевая канавка для размещения в овальном горизонтальном пазу направляющей.
9. Стол по п.1, отличающийся тем, что осевое смещение каждого рычага на посадочной поверхности кольца шарнира ограничено плоскими полукольцами, размещенными в кольцевой канавке на посадочной поверхности, а упомянутые полукольца средствами крепления зафиксированы на боковине каждого рычага.
10. Стол по п.1, отличающийся тем, что между кольцевыми канавками и торцами общей оси шарнира выполнены лыски под размер зева рожкового ключа.
11. Стол по п.1, отличающийся тем, что на торцах кольца шарнира в резьбовых отверстиях размещены пресс-масленки для подачи консистентной смазки на посадочные поверхности кольца.
12. Стол по п.1, отличающийся тем, что каждая тяга посредством цапфы размещена на внешней боковине перекрещивающегося рычага.
13. Стол по п.1, отличающийся тем, что один из концов соответствующей тяги посредством цапф кронштейна соединен с гильзой силового гидроцилиндра второй пары силовых гидроцилиндров.
14. Стол по п.1, отличающийся тем, что штоковые и бесштоковые полости гильзы силовых гидроцилиндров параллельно гидравлически соединены в гидравлическую сеть гидростанции грузоподъемного стола.
15. Стол по п.1, отличающийся тем, что при крайнем нижнем положении грузовой платформы над основанием плоские грани направляющих грузовой платформы и основания сопряжены.
16. Стол по п.1, отличающийся тем, что в отверстиях грузовой платформы размещены рым-болты.
17. Стол по п.1, отличающийся тем, что основание снабжено монтажными отверстиями под анкерные болты.
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2335454C1 |
| JP 7267595 А1, 17.10.1995 | |||
| Подъемник | 1987 |
|
SU1430338A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2005 |
|
RU2297974C1 |

