Изобретение относится к измерительной технике и может быть использовано для определения трассы и глубины прокладки подводного кабеля в дно водоема в процессе его эксплуатации, а также трассы и глубины прокладки труб и других протяженных подводных коммуникаций.
Известны способы определения трассы и глубины укладки в дно водоема протяженных подводных сооружений (авт. свид. СССР №№ 569987, 985595; патент РФ № 2271021; патенты США №№ 3835371, 4283681, 6588980; патент Японии № 7031042; патент ЕР № 1215114; патент WO № 2/079806; Schock S.G., Tellier A., Wulf Y., Jason S., Ericksen M. Buried object scanning Sonar. - YEEE Journal of oceanic eligineering. vol.26, №4, October, 2001. - pp.676-689 и другие).
Из известных способов наиболее близким к предлагаемому является «Способ определения трассы и глубины прокладки подводного кабеля» (патент РФ № 2271021, G01S 15/00, 2004), который и выбран в качестве прототипа.
Указанный способ обеспечивает сканирование электромагнитного поля над подводным кабелем за счет измерений уровней электромагнитного поля распределенной системой датчиков, расположенных в некотором пространстве над кабелем по определенной схеме.
Однако известный способ не обеспечивает высокой помехоустойчивости, точности определения трассы и глубины прокладки в дно водоема подводного кабеля.
Технической задачей изобретения является повышение помехоустойчивости и точности определения трассы и глубины прокладки в дно водоема подводного кабеля.
Поставленная задача решается тем, что способ определения трассы и глубины прокладки в дно водоема подводного кабеля, заключающийся согласно ближайшему аналогу в том, что по кабелю передают низкочастотный электромагнитный сигнал с помощью расположенного на поверхности водоема плавсредства, перемещают вблизи дна водоема над кабелем систему приемных всенаправленных антенн, приемные антенны распределяют в пространстве по определенной схеме так, чтобы их взаимное расположение относительно друг друга при перемещении не изменялось, к системе антенн крепят преобразователь, который соединяют с каждой из приемных антенн и через кабель управления подключают к блоку обработки на плавсредстве, в преобразователе принимают сигналы от каждой из приемных антенн, оптимизируют их параметры и последовательно передают по кабелю управления к блоку обработки, в котором запоминают уровни электромагнитного поля, принимаемые каждой из приемных антенн системы, устанавливают на плавсредстве эхолот, с помощью которого определяют расположение системы приемных антенн относительно дна водоема, по данным о расположении каждой из приемных антенн системы и принимаемых ими уровнях электромагнитных сигналов определяют распределение уровней электромагнитного поля в пространстве над подводным кабелем, по которому определяют трассу прокладки по расположению максимальных значений уровней и глубину прокладки подводного кабеля в дно водоема путем сравнения максимальных значений с опорным, отличается от ближайшего аналога тем, что используют блок автоматического контроля с двумя приемными антеннами, расположенными в центре системы приемных антенн, одна из которых имеет кардиоидную диаграмму направленности, а другая - круговую, устанавливают указанные приемные антенны так, чтобы направление нулевого приема было перпендикулярно дну водоема, перемещают систему приемных антенн так, чтобы направление нулевого приема и трасса прокладки подводного кабеля находились в одной вертикальной плоскости, при отклонении направления нулевого приема от вертикальной плоскости прокладки трассы подводного кабеля формируют управляющее напряжение, амплитуда и полярность которого соответствуют степени и направлению отклонения направления нулевого приема от вертикальной плоскости трассы прокладки подводного кабеля, воздействуют управляющим напряжением на исполнительный блок так, чтобы указанное отклонение стремилось к нулю, делят продетектированное приемной аппаратурой с круговой диаграммой направленности напряжение на продетектированное приемной аппаратурой с кардиоидной диаграммой направленности напряжение, сравнивают напряжение, пропорциональное частному от деления, с пороговым напряжением, при превышении порогового напряжения, что соответствует совмещению направления нулевого приема с вертикальной плоскостью трассы прокладки подводного кабеля, формируют управляющий импульс, который разрешает измерение несущей частоты принимаемого сигналы, сравнивают код измеренной частоты с кодом используемой частоты и при их равенстве формируют команду на разрешении обработки получаемой информации в блоке обработки.
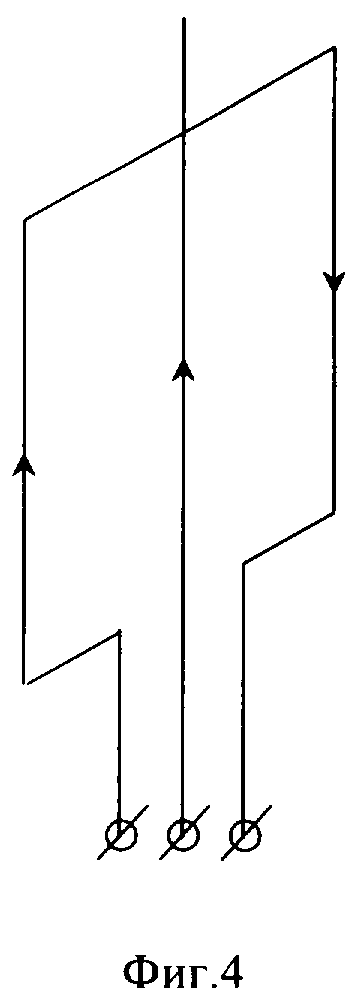
Структурная схема устройства, реализующего предлагаемый способ, представлена на фиг.1. Структурная схема блока контроля 10 представлена на фиг.2. Взаимное расположение кабеля 8 и диаграмм направленности приемных антенн 11 и 12 показано на фиг.3. Антенна, состоящая из рамки и вибратора и формирующая диаграмму направленности в виде кардиоиды, изображена на фиг.4. Пеленгационные характеристики приемных антенн 11 и 12 показаны на фиг.5.
Устройство содержит размещенный на плавсредстве 1 эхолот 2, преобразователь 3, который через кабель управления 4 подключен к блоку 5 обработки на плавсредстве, прикреплен к системе 6 приемных антенн, каждая из которых имеет круговую диаграмму направленности, и соединен с каждой из приемных антенн, при этом приемные антенны 7 распределены в пространстве над подводным кабелем 8 вблизи дна водоема 9 по определенной схеме так, чтобы их взаимное расположение относительно друг друга при перемещении не изменялось. В устройство введен также блок 10 контроля с приемными антеннами 11 и 12, подключенный к преобразователю 3. При этом приемная антенна 11 имеет круговую диаграмму направленности, а приемная антенна 12 имеет кардиоидную диаграмму направленности, получаемую с помощью рамки и вибратора (фиг.4).
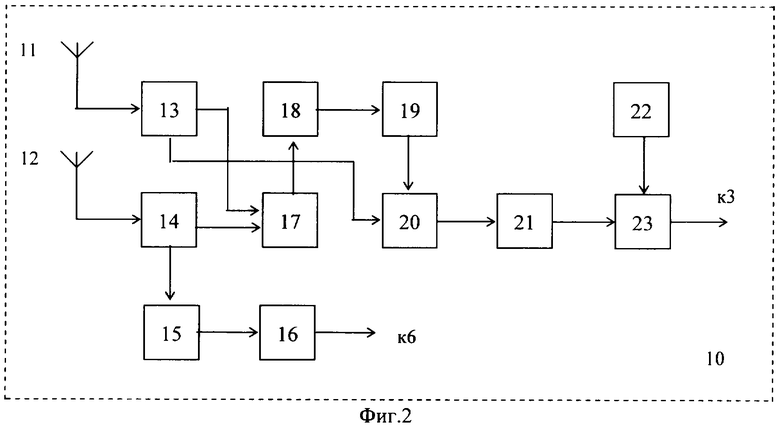
Блок 10 контроля состоит из последовательно подключенных к выходу приемной антенны 11 первого приемника 13, блока 17 деления, второй вход которого через второй приемник 14 соединен с выходом приемной антенны 12, порогового блока 18, формирователя 19 управляющего импульса, ключа 20, второй вход которого соединен с вторым выходом первого приемника 13, измерителя 21 частоты и блока 23 сравнения кодов, второй вход которого соединен с выходом блока 22 памяти, а выход является первым выходом блока 10 контроля. К второму выходу второго приемника 14 последовательно подключены формирователь 15 управляющего напряжения и исполнительный блок 16, выход которого является вторым выходом блока 10 контроля.
Способ определения трассы и глубины прокладки подводного кабеля реализуется следующим образом.
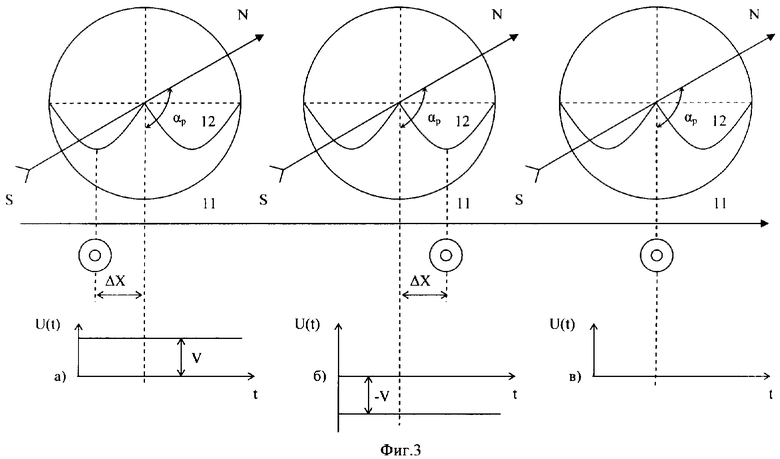
Антенны 11 и 12 подключены к блоку 10 контроля и располагаются так, чтобы направление нулевого приема было перпендикулярно дну 9 водоема.
При перемещении плавсредства 1 в районе прокладки подводного кабеля 8 с помощью эхолота 2 определяют расположение каждой из приемных антенн 7 системы приемных антенн 6 относительно дна водоема 9.
Каждый приемник 13 (14) состоит из последовательно соединенных усилителя высокой частоты и амплитудного детектора. Низкочастотное напряжение с выхода усилителя высокой частоты (со второго выхода второго приемника 14) поступает на вход формирователя 15 управляющего напряжения.
Если направление нулевого приема не совпадает с вертикальной плоскостью, в которой расположена трасса прокладки подводного кабеля, то блоком 15 формируется управляющее напряжение, амплитуда и полярность которого зависят от степени Δх и стороны отклонения направления нулевого приема от вертикальной плоскости, в которой расположена трасса прокладки подводного кабеля 8 (фиг.3, а, б). Это напряжение поступает на вход исполнительного блока 16, который воздействует на систему 6 приемных антенн так, чтобы смещение Δх стремилось к нулю (фиг.3, в). В этот момент времени выходное напряжение Uвых(α) приемника 14 также стремится к нулю, а выходное напряжение блока 17 деления стремится к своему максимальному значению. Блок 17 деления осуществляет деление продетектированных напряжений с первых выходов приемников 13 и 14.
Величина порога выставляется так, чтобы пороговый блок 18 срабатывал только от сигналов, приходящих с нулевого направления.
При срабатывании порогового блока 18 формирователь 19 вырабатывает управляющий импульс, который поступает на управляющий вход ключа 20, открывая его. Ключ 20 в исходном состоянии всегда закрыт. При этом низкочастотный сигнал со второго выхода приемника 13 (с выхода усилителя высокой частоты) через открытый ключ 20 поступает на вход измерителя 21 частоты. Код измеренной частоты поступает на первый вход блока 23 сравнения кодов, на второй вход которого поступает код используемой частоты, предварительно записанный в блоке 22 памяти.
Если коды указанных частот равны, то блок 23 сравнения кодов формирует импульс, который через преобразователь 3 и кабель 4 управления поступает в блок 5 обработки в качестве команды на разрешение обработки получаемой информации.
Зависимость выходных напряжений Uвых(α) приемников 13 и 14 от направления прихода электромагнитных волн представляет собой пеленгационные характеристики (фиг.5).
Приемная антенна 12 обладает высокой пеленгационной чувствительностью, которая представляет собой крутизну пеленгационной характеристики в направлении трассы прокладки подводного кабеля 8

но низким отношением сигнал/шум. Совместное использование двух антенн 11 и 12 устраняет этот недостаток, сохраняя достоинство.
Электромагнитные сигналы от приемных антенн 7 поступают в преобразователь 3, который оптимизирует их параметры и последовательно передает их по кабелю 4 управления к блоку 5 обработки, который запоминает уровни электромагнитного поля, принимаемые каждой из приемных антенн 7 системы 6 приемных антенн. По данным взаимного расположения приемных антенн 7, их расположения относительно дна водоема 9 и значениям уровней электромагнитных сигналов, принимаемым каждой из антенн, определяют распределение электромагнитного поля в некоторой плоскости пространства над подводным кабелем 8 вблизи дна водоема 9. По результатам обработки распределения электромагнитного поля над кабелем определяют трассу и глубину прокладки подводного кабеля в дно водоема.
При подключении эхолота к GPS могут быть определены координаты кабеля.
Взаимное расположение приемных антенн известно с высокой точностью, погрешности оценок расположения приемных антенн относительно дна водоема также малы.
Таким образом, предлагаемый способ по сравнению с прототипом обеспечивает повышение помехоустойчивости и точности определения трассы и глубины прокладки в дно водоема подводного кабеля. Это достигается повышением отношения сигнал/шум, подавлением ложных сигналов (помех), не представляющих интереса для радиоконтроля, и использованием системы автоматического регулирования, обеспечивающей совмещение направления нулевого приема с вертикальной плоскостью, в которой находится трасса прокладки подводного кабеля.
Измерение несущей частоты принимаемого сигнала осуществляется при максимальном отношении сигнал/шум.
За счет пространственного стробирования обеспечивается устранение ложных сигналов (помех), приходящих с других направлений, и появляется возможность обнаружения слабых сигналов, излучаемых подводным кабелем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГАЦИИ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2321015C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278048C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2278047C1 |
| СПОСОБ СОВМЕЩЕННОЙ РАДИОСВЯЗИ И РАДИОНАВИГАЦИИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ, ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2348560C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ОЧИСТНЫХ И ДИАГНОСТИЧЕСКИХ СНАРЯДОВ В ТРУБОПРОВОДЕ | 2007 |
|
RU2340831C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И РЕГИСТРАЦИИ ЭКСПЛУАТАЦИОННЫХ ПОКАЗАТЕЛЕЙ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2267811C1 |
| СТАНЦИЯ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2006 |
|
RU2321177C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2006 |
|
RU2314644C1 |
| ТЕРРИТОРИАЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТРАНСПОРТИРОВКИ ЭКОЛОГИЧЕСКИ ОПАСНЫХ ГРУЗОВ | 2004 |
|
RU2271038C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ | 2007 |
|
RU2360266C1 |

Изобретение относится к измерительной технике и может быть использовано для определения трассы и глубины прокладки подводного кабеля в дно водоема в процессе его эксплуатации, а также трассы и глубины прокладки труб и других протяженных подводных коммуникаций. Техническим результатом изобретения является повышение помехоустойчивости и точности определения трассы и глубины прокладки в дно водоема подводного кабеля. Устройство, реализующее предлагаемый способ, содержит плавсредство 1, эхолот 2, преобразователь 3, кабель 4 управления, блок 5 обработки, систему 6 приемных антенн, приемные антенны 7, подводный кабель 8, дно 9 водоема, блок 10 контроля, приемные антенны 11 и 12 с круговой и кардиоидной диаграммами направленности соответственно. 5 ил.
Способ определения трассы и глубины прокладки в дно водоема подводного кабеля, заключающийся в том, что по кабелю передают низкочастотный электромагнитный сигнал, с помощью расположенного на поверхности водоема плавсредства перемещают вблизи дна водоема над кабелем систему приемных всенаправленных антенн, приемные антенны распределяют в пространстве по определенной схеме так, чтобы их взаимное расположение относительно друг друга при перемещении не изменялось, к системе антенн крепят преобразователь, который соединяют с каждой из приемных антенн и через кабель управления подключают к блоку обработки на плавсредстве, в преобразователе принимают сигналы от каждой из приемных антенн, оптимизируют их параметры и последовательно передают по кабелю управления к блоку обработки, в котором запоминают уровни электромагнитного поля, принимаемые каждой из приемных антенн системы, устанавливают на плавсредстве эхолот, с помощью которого определяют расположение системы приемных антенн относительно дна водоема, по данным о расположении каждой из приемных антенн системы и принимаемых ими уровнях электромагнитных сигналов определяют распределение уровней электромагнитного поля в пространстве над подводным кабелем, по которому определяют трассу прокладки по расположению максимальных значений уровней и глубину прокладки подводного кабеля в дно водоема путем сравнения максимальных значений с опорным, отличающийся тем, что используют блок автоматического контроля с двумя приемными антеннами, расположенными в центре системы приемных антенн, одна из которых имеет кардиоидную диаграмму направленности, а другая - круговую, устанавливают указанные приемные антенны так, чтобы направление нулевого приема было перпендикулярно дну водоема, перемещают систему приемных антенн так, чтобы направление нулевого приема и трасса прокладки подводного кабеля находились в одной вертикальной плоскости, при отклонении направления нулевого приема от вертикальной плоскости трассы прокладки подводного кабеля формируют управляющее напряжение, амплитуда и полярность которого соответствуют степени и направлению отклонения направления нулевого приема от вертикальной плоскости трассы прокладки подводного кабеля, воздействуют управляющим напряжением на исполнительный блок так, чтобы указанное отклонение стремилось к нулю, делят продетектированное приемной аппаратурой с круговой диаграммой направленности напряжение на продетектированное приемной аппаратурой с кардиоидной диаграммой направленности напряжение, сравнивают напряжение, пропорциональное частному от деления, с пороговым напряжением, при превышении порогового напряжения, что соответствует совмещению направления нулевого приема с вертикальной плоскостью трассы прокладки подводного кабеля, формируют управляющий импульс, который разрешает измерение несущей частоты принимаемого сигнала, сравнивают код измеренной несущей частоты с кодом используемой частоты и при их равенстве формируют команду на разрешение обработки получаемой информации в блоке обработки.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2271021C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2285277C2 |
| Способ определения трассы подводного кабеля, а также местоположения его концов при обрыве | 1952 |
|
SU98596A1 |
| ТЕПЛО-СИЛОВАЯ УСТАНОВКА С ЗАМКНУТЫМ ЦИКЛОМ | 1925 |
|
SU4385A1 |
| US 7030616 B1, 18.04.2006 | |||
| US 2005180263 A1, 18.08.2005. | |||

