Изобретение относится к измерительной технике и может быть использовано для определения трассы и глубины прокладки подводного кабеля в дно водоема в процессе его эксплуатации, а также трассы и глубины прокладки труб и других протяженных подводных коммуникаций.
Известен способ [1] определения трассы и глубины укладки в дно водоема протяженных подводных сооружений, заключающийся в том, что с помощью эхолота сканируют дно водоема, регистрируют полученные при ультразвуковом сканировании изображения и в результате их обработки определяют трассу и глубину укладки в дно водоема протяженного подводного сооружения. Данный способ не отличается высокой точностью определения уровня заглубления подводного кабеля в дно водоема. Его реализация требует применения сложных автоматизированных систем ультразвукового сканирования и обработки изображений, стоимость которых высока. И, кроме того, данный способ не позволяет локализовать подводный кабель, проложенный вблизи более габаритного подводного сооружения, например трубопровода.
Известен способ [2] локализации места прокладки подводного кабеля, заглубленного в дно водоема, заключающийся в том, что датчик металлоискателя размещают на ноже кабелеукладчика, который заглубляют в дно водоема и перемещают. При этом управляют кабелеукладчиком с плавсредства на поверхности водоема по кабелю, проложенному между ними. Информацию от датчика передают по этому кабелю к системе управления, и в случае выявления подводного кабеля кабелеукладчик останавливается. Данный способ не может практически применяться для поиска трассы подводного кабеля и глубины укладки его в дно водоема.
Известна подводная поисковая система [3], включающая линейные приемные антенны, перемещаемые под водой за плавсредством. Из-за большой протяженности приемных антенн разрешающая способность системы мала. Это, а также неопределенность ориентации линейных приемных антенн относительно исследуемого подводного протяженного объекта не позволяют обеспечить приемлемую точность поиска трассы прокладки и определения уровня заглубления кабеля в дно водоема.
Известен способ определения трассы прокладки подводного кабеля, заключающийся в том, что по кабелю передают низкочастотный электромагнитный сигнал, вблизи дна водоема размещают настроенную на эту же частоту приемную антенну, которую соединяют кабелем управления с блоком обработки на расположенном на поверхности водоема плавсредством. С помощью плавсредства перемещают приемную антенну над подводным кабелем, принимаемый приемной антенной сигнал передают к блоку обработки и по распределению уровней электромагнитного поля над подводным кабелем определяют трассу и глубину прокладки подводного кабеля в дно водоема. Недостаток данного способа - в необходимости строгого соблюдения определенной взаимной ориентации приемной антенны и исследуемого подводного кабеля. Нарушение этого условия ведет к значительным погрешностям, а его обеспечение требует использования дорогостоящих систем автоматизированной ориентации приемной антенны.
Сущностью предлагаемого изобретения является повышение точности и снижение стоимости определения трассы и глубины прокладки в дно водоема подводного кабеля.
Эта сущность достигается тем, что, согласно способу определения трассы и глубины прокладки в дно водоема подводного кабеля, по кабелю передают низкочастотный электромагнитный сигнал, с помощью расположенного на поверхности водоема плавсредства перемещают настроенную на эту же частоту приемную антенну над подводным кабелем вблизи дна водоема, принимаемый приемной антенной сигнал передают к блоку обработки на плавсредстве и по распределению уровней электромагнитного поля над подводным кабелем определяют трассу и глубину прокладки подводного кабеля в дно водоема, при этом вблизи дна водоема над кабелем перемещают систему из приемных всенаправленных антенн, приемные антенны распределяют в пространстве по определенной схеме так, чтобы их взаимное расположение относительно друг друга при перемещении не изменялось, к системе антенн крепят преобразователь, который соединяют с каждой из приемных антенн и через кабель управления подключают к блоку обработки на плавсредстве, в преобразователе принимают сигналы от каждой из приемных антенн, оптимизируют их параметры и последовательно передают по кабелю управления к блоку обработки, в котором запоминают уровни электромагнитного поля, принимаемые каждой из приемных антенн системы, устанавливают на плавсредстве эхолот, с помощью которого определяют расположение системы приемных антенн относительно дна водоема, по данным о расположении каждой из приемных антенн системы и принимаемых ими уровнях электромагнитных сигналов определяют распределение уровней электромагнитного поля в пространстве над подводным кабелем, по которому определяют трассу прокладки по расположению максимальных значений уровней и глубину прокладки подводного кабеля в дно водоема путем сравнения максимальных значений с опорным.
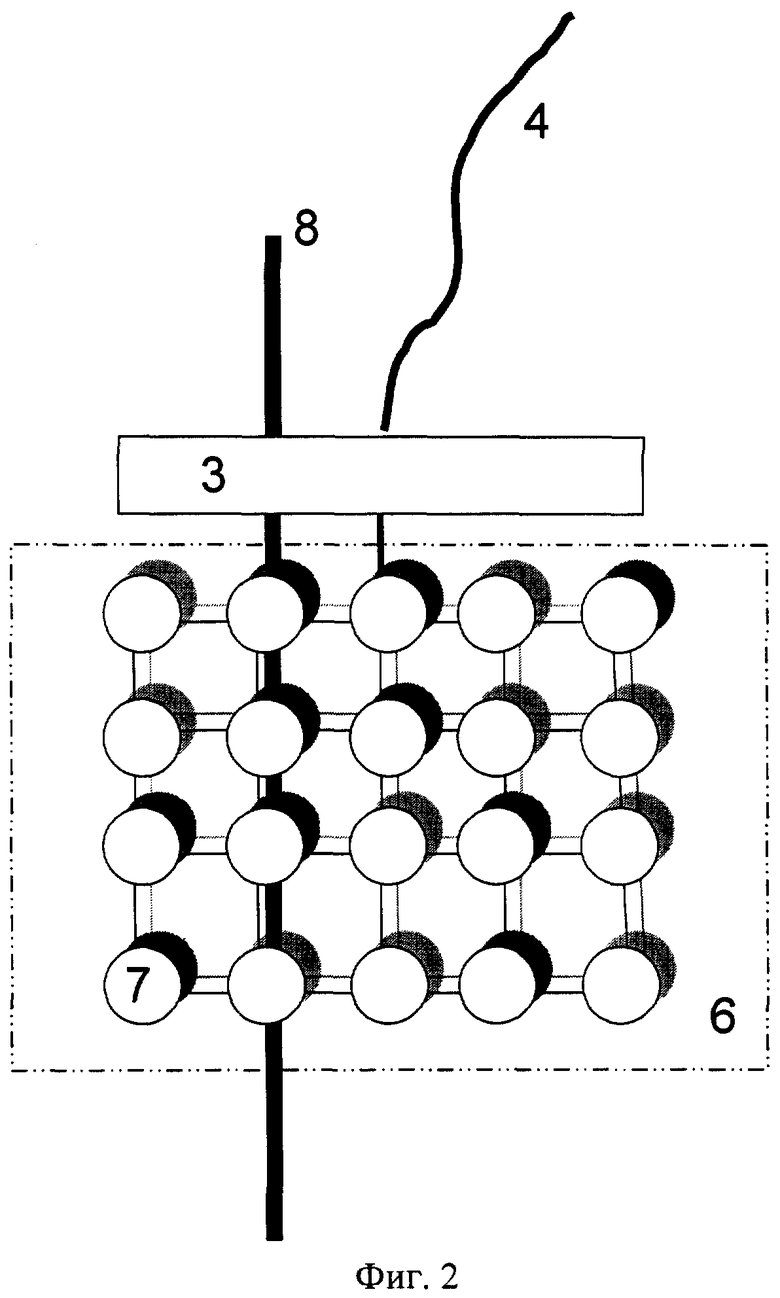
На фиг.1 представлена структурная схема устройства для реализации заявляемого способа, а фиг.2 иллюстрирует принцип построения системы приемных антенн.
Устройство содержит размещенный на плавсредстве 1 эхолот 2, преобразователь 3, который через кабель управления 4 подключен к блоку обработки 5 на плавсредстве 1, прикреплен к системе приемных антенн 6, каждая из которых имеет круговую диаграмму направленности, и соединен с каждой из приемных антенн, при этом приемные антенны 7 распределены в пространстве над подводным кабелем 8 вблизи дна водоема 9 по определенной схеме так, чтобы их взаимное расположение относительно друг друга при перемещении не изменялось.
Способ осуществляется следующим образом. При перемещении плавсредства 1 в районе прокладки подводного кабеля 8 с помощью эхолота 2 определяют расположение каждой из приемных антенн 7 системы приемных антенн 6 относительно дна водоема 9. Электромагнитные сигналы от приемных антенн 7 поступают в преобразователь, который оптимизирует их параметры и последовательно передает их по кабелю управления 4 к блоку обработки 5, который запоминает уровни электромагнитного поля, принимаемые каждой из приемных антенн 7 системы приемных антенн 6. По данным взаимного расположения приемных антенн 7, их расположения относительно дна водоема 9 и значениям уровней электромагнитных сигналов, принимаемым каждой из антенн, определяют распределение электромагнитного поля в некоторой плоскости пространства над подводным кабелем 8 вблизи дна водоема 9. По результатам обработки распределения электромагнитного поля над кабелем определяют трассу и глубину прокладки подводного кабеля в дно водоема.
При подключении эхолота к GPS могут быть определены координаты кабеля.
Предлагаемый способ обеспечивает сканирование электромагнитного поля над подводным кабелем не за счет управления ориентацией диаграммы направленности приемной антенны и ее перемещений последней поперек трассы прокладки кабеля, а за счет выполнения измерений уровней электромагнитного поля распределенной системой датчиков, расположенных в некотором пространстве над кабелем по определенной схеме. Это не требует строгого соблюдения определенной взаимной ориентации приемной антенны и кабеля, так как приемные антенны имеют круговую диаграмму направленности. В результате отпадает необходимость в дорогостоящей автоматизированной юстировке приемной антенны. Взаимное расположение приемных антенн известно с высокой точностью, погрешности оценок расположения приемных антенн относительно дна водоема также малы. Это обеспечивает снижение погрешностей измерений распределения уровней электромагнитного поля над подводным кабелем. Тем самым обеспечивается расширение области применения, повышение точности и снижение стоимости определения трассы и глубины прокладки в дно водоема подводного кабеля.
ЛИТЕРАТУРА
1. Schock S.G., Tellier A., Wulf J., Jason S., Ericksen M. Buried object scanning sonar. - IEEE Journal of oceanic engineering, vol.26, No 4, October, 2001. - p.p.677-689.
2. US 4283681.
3. WO 02/079806 A1.
4. US 3835371.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2006 |
|
RU2326343C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2006 |
|
RU2330310C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАССЫ И ГЛУБИНЫ ПРОКЛАДКИ ПОДВОДНОГО КАБЕЛЯ | 2004 |
|
RU2285277C2 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Мультиагентный программно-аппаратный комплекс сбора, передачи, обработки, отображения данных для выполнения гидрографической съемки водоемов и оперативного мониторинга изменения рельефа дна | 2021 |
|
RU2760343C1 |
| Способ поиска трассы прокладки оптического кабеля | 2020 |
|
RU2755431C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
Изобретение относится к измерительной технике и может быть использовано для определения трассы и глубины прокладки подводного кабеля в дно водоема в процессе его эксплуатации, а также трассы и глубины прокладки труб и других протяженных подводных коммуникаций. Достигаемым техническим результатом является повышение точности и снижение стоимости определения трассы и глубины прокладки в дно водоема подводного кабеля. Сущность изобретения заключается в том, что согласно способу определения трассы и глубины прокладки в дно водоема подводного кабеля по кабелю передают низкочастотный электромагнитный сигнал, с помощью расположенного на поверхности водоема плавсредства перемещают настроенную на эту же частоту приемную антенну над подводным кабелем вблизи дна водоема, принимаемый приемной антенной сигнал передают к блоку обработки на плавсредстве и по распределению уровней электромагнитного поля над подводным кабелем определяют трассу и глубину прокладки подводного кабеля в дно водоема, при этом вблизи дна водоема над кабелем перемещают систему из приемных всенаправленных антенн, приемные антенны распределяют в пространстве по определенной схеме так, чтобы их взаимное расположение относительно друг друга при перемещении не изменялось, к системе антенн крепят преобразователь, который соединяют с каждой из приемных антенн и через кабель управления подключают к блоку обработки на плавсредстве, в преобразователе принимают сигналы от каждой из приемных антенн, оптимизируют их параметры и последовательно передают по кабелю управления к блоку обработки, в котором запоминают уровни электромагнитного поля, принимаемые каждой из приемных антенн системы, устанавливают на плавсредстве эхолот, с помощью которого определяют расположение системы приемных антенн относительно дна водоема, по данным о расположении каждой из приемных антенн системы и принимаемых ими уровнях электромагнитных сигналов определяют распределение уровней электромагнитного поля в пространстве над подводным кабелем, по которому определяют трассу прокладки по расположению максимальных значений уровней и глубину прокладки подводного кабеля в дно водоема путем сравнения максимальных значений с опорным. 2 ил.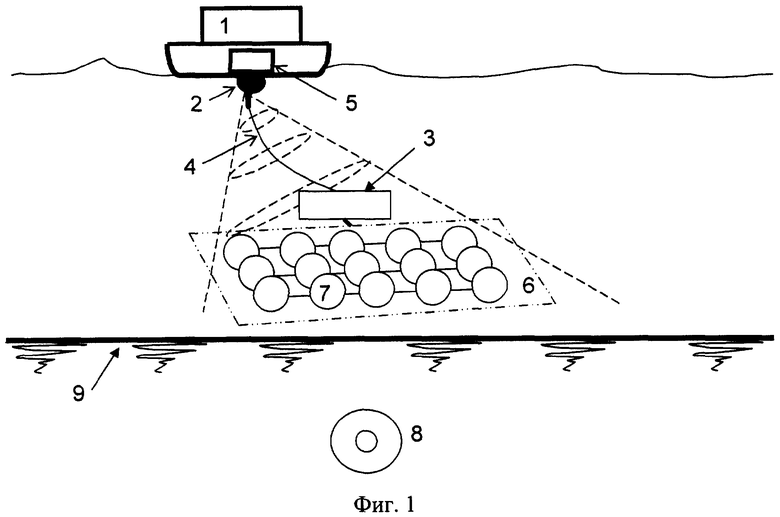
Способ определения трассы и глубины прокладки в дно водоема подводного кабеля, заключающийся в том, что по кабелю передают низкочастотный электромагнитный сигнал, с помощью расположенного на поверхности водоема плавсредства перемещают настроенную на эту же частоту приемную антенну над подводным кабелем вблизи дна водоема, принимаемый приемной антенной сигнал передают к блоку обработки на плавсредстве и по распределению уровней электромагнитного поля над подводным кабелем определяют трассу и глубину прокладки подводного кабеля в дно водоема, отличающийся тем, что при этом вблизи дна водоема над кабелем перемещают систему из приемных всенаправленных антенн, приемные антенны распределяют в пространстве по определенной схеме, так чтобы их взаимное расположение относительно друг друга при перемещении не изменялось, к системе антенн крепят преобразователь, который соединяют с каждой из приемных антенн и через кабель управления подключают к блоку обработки на плавсредстве, в преобразователе принимают сигналы от каждой из приемных антенн, оптимизируют их параметры и последовательно передают по кабелю управления к блоку обработки, в котором запоминают уровни электромагнитного поля, принимаемые каждой из приемных антенн системы, устанавливают на плавсредстве эхолот, с помощью которого определяют расположение системы приемных антенн относительно дна водоема, по данным о расположении каждой из приемных антенн системы и принимаемых ими уровнях электромагнитных сигналов определяют распределение уровней электромагнитного поля в пространстве над подводным кабелем, по которому определяют трассу прокладки по расположению максимальных значений уровней и глубину прокладки подводного кабеля в дно водоема путем сравнения максимальных значений с опорным.
| US 4283681, 11.08.1981 | |||
| Способ определения трасс прокладки подводных трубопроводов | 1975 |
|
SU569987A1 |
| Способ определения трассы подводного кабеля, а также местоположения его концов при обрыве | 1952 |
|
SU98596A1 |
| Устройство для сопряжения эвм с абонентами | 1984 |
|
SU1215114A1 |
| JP 7031042, 31.01.1995 | |||
| US 6588980 В2, 08.07.2003. | |||

