Способ переключения режимов работы тяговых электродвигателей посредством реостатного контроллера основан на ступенчатом выводе из силовой цепи тяговых двигателей последовательно включенных пусковых сопротивлений или ступенчатого подключения параллельно обмоткам возбуждения шунтирующих резисторов и применяется на железнодорожном транспорте и, в частности, на электропоездах.
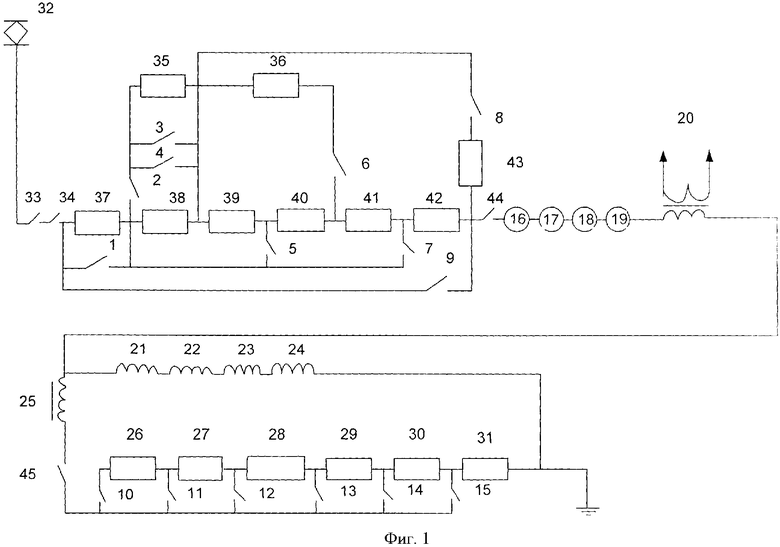
Известен способ ступенчатого отключения из цепи тяговых двигателей пусковых сопротивлений или ступенчатого включения шунтирующих резисторов [1, рис 4.1.]. На фиг.1 представлена упрощенная силовая схема тяговых двигателей 16, 17, 18, 19 в режиме тяги. В режиме тяги включен быстродействующий выключатель (33), линейные контакторы (34), (44). Таким образом, в маневровом режиме тяги в цепь тяговых двигателей, получающих питание от контактной сети через токоприемник 32, подключена группа пусковых сопротивлений 35, 36, 37, 38, 39, 40, 41, 42, 43.
В процессе разгона электропоезда пусковые сопротивления выводятся из цепи тяговых двигателей реостатным контроллером, при этом в определенной зависимости переключаются силовые контакторные элементы 1, 2, 3, 4, 5, 6, 7, 8, 9 (фиг.1). После вывода из цепи тяговых двигателей 16-19 пусковых сопротивлений 35-36 состояние силовой схемы (фиг.1) рассматривается как статическое. Для изменения режима работы тяговых электродвигателей в зависимости от положения контроллера машиниста в кабине управления параллельно обмоткам возбуждения тяговых двигателей 21, 22, 23, 24 включаются группы шунтирующих резисторов 26, 27, 28, 29, 30, 31. Включение шунтирующих резисторов выполняется контактором 45 через индуктивный шунт 25. Ступенчатое подключение параллельно обмоткам возбуждения тяговых двигателей шунтирующих резисторов производится силовыми контакторными элементами 10, 11, 12, 13, 14, 15 (фиг.1).
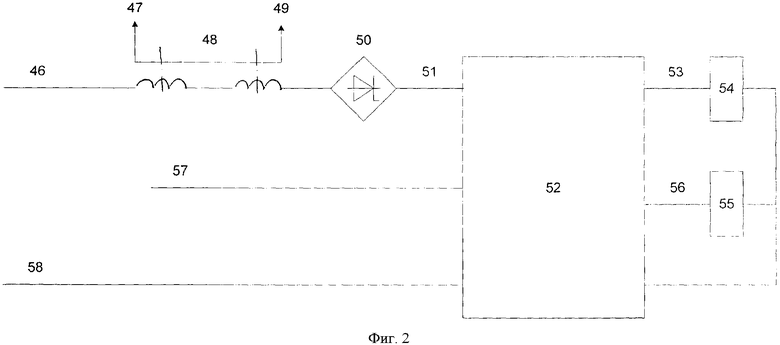
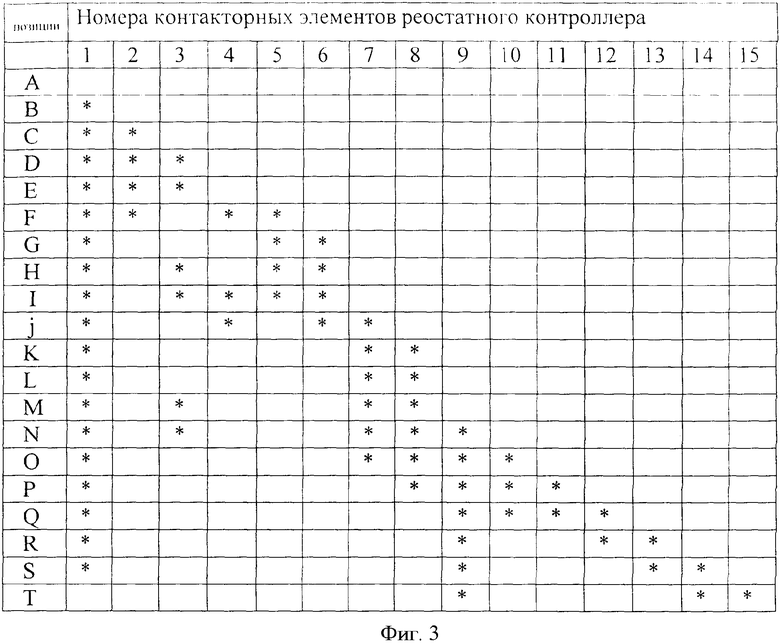
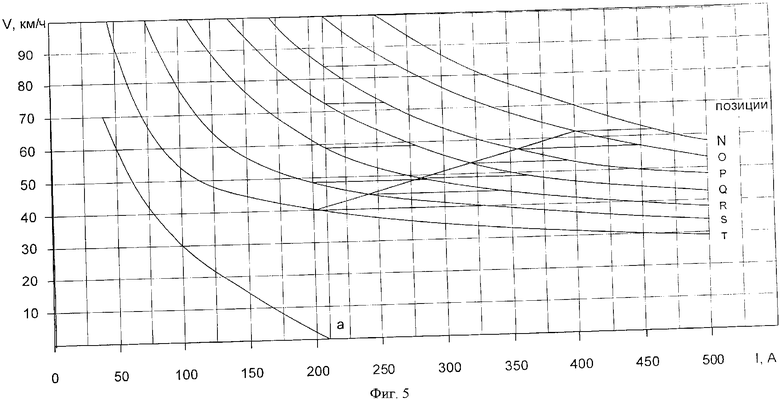
Силовые контакторные элементы 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 по конструкции выполнены как реостатный контроллер, позиция которого определяется положением контроллера машиниста в кабине управления [1, стр.230-233]. Переключение силовых контакторных элементов 1-9 и 10-15 реостатного контроллера происходит при вращении вала реостатного контроллера с фиксацией в необходимом положении, вызываемое поочередным воздействием на вал реостатного контроллера электропневматических вентилей 54, 55 привода Решетова (фиг.2). Вывод из силовой цепи пусковых сопротивлений 35-42 (фиг.1), подключение шунтирующих резисторов 26-31 (фиг.1) реостатным контроллером на необходимую позицию происходит при фиксированном значении тока - тока уставки. Включение электропневматических вентилей 54, 55, вызывающее вращение вала реостатного контроллера и переключение силовых контакторных элементов, возможно только в случае, когда ток тяговых двигателей меньше или равен заданному току уставки. Реостатный контроллер имеет 18 или 20 позиций в зависимости от серии электропоезда. Каждой позиции соответствует определенное положение силовых контакторных элементов реостатного контроллера. На фиг.3 приведена таблица последовательности замыкания контакторных элементов реостатного контроллера в зависимости от положения контроллера машиниста [1, стр.321]. Значение уставки тока регулируется числом стабилитронов, включенных в диагональ моста 50 (фиг.2), определяющее величину переменного напряжения, подаваемое на вход блока реле ускорения 52 (фиг.2) по проводу 51. Всего существует 7 значений тока уставки, минимальное 140 А, максимальное 410 А [1,стр.366-367]. На фиг.2 изображена схема, поясняющая работу электропневматических вентилей реостатного контроллера в зависимости от тока тяговых двигателей и заданного значения тока уставки. По кабелю 47-49 датчика тока якорей 48 (фиг.1, 2) протекает ток силовой цепи тяговых электродвигателей, на фиг.1 силовой кабель и датчик тока якорей показан позицией 20. В процессе разгона и увеличения скорости ток тяговых двигателей меняется, следовательно, меняется и магнитный поток и индуктивное сопротивление рабочих обмоток магнитного усилителя (датчика тока якорей 48 фиг.2). В итоге будет меняться и переменное напряжение, подаваемое на вход блока реле ускорения 52 (фиг.2). Если ток уставки тяговых двигателей в текущий момент более заданного значения, индуктивное сопротивление обмоток датчика тока якорей 48 велико и сигнал на блок реле ускорения 52 не поступает. Наличие питания на проводе 57 (фиг.2), от контроллера машиниста, зависит от его положения в кабине управления. Питание на проводе 57 отсутствует, если контроллер машиниста находится в маневровом или нулевом положении, при этом в цепь тяговых двигателей последовательно включены все группы пусковых резисторов 35-42 (фиг.1). При токе тяговых двигателей равным или меньшим значения тока уставки, блок реле ускорения 52 хронометрически, поочередно выдает управляющие импульсы по проводам 53 или 56. В результате возбуждаются катушки электропневматических вентилей 54 или 55, вал реостатного контроллера переходит на очередную позицию, переключая при этом согласно таблице замыкания (фиг 3) соответствующий силовой контакторный элемент. Исключение из цепи тяговых двигателей при этом группы пусковых 35-42 (фиг.1) или подключение шунтирующих резисторов 26-31 (фиг.1), вызывает увеличение тока, если значение увеличившегося в результате переключения тока более тока уставки, сигнал на блок 52 (фиг.2) не поступает, как только с ростом скорости значение тока тяговых двигателей спадет до значения тока уставки, на проводе 51 появится напряжение, и блок 52 по проводу 53 или 56 подаст импульс на электропневматический вентиль 54 или 55, и реостатный контроллер перейдет на очередную позицию. Каждой позиции реостатного контроллера соответствует своя характеристика тяговых двигателей. На фиг.5 показаны характеристики тяговых двигателей а, Т, S, R, Q, Р, О, N в зависимости от позиции реостатного контроллера и переходы на очередную позицию при токе уставки 210 А. Позиция а соответствует положению силовой схемы (фиг.1), когда все пусковые сопротивления 35-42 подключены к тяговым двигателям 16-19. Позиция Т соответствует положению силовой схемы (фиг.1), когда пусковые сопротивления 35-42 выведены поочередно реостатным контроллером, посредством переключения силовых элементов 1-9. Промежуточные реостатные позиции В, С, D, Е, F, G, H, I, J, К, L, М из фиг.3 на фиг.5 не показаны, так как они даны только для пояснения работы силовой схемы (фиг.1) при реостатном пуске тяговых двигателей. Предлагаемое изобретение предусматривает изменение способа управления режимами работы тяговых электродвигателей при ослаблении возбуждения тяговых двигателей, когда к их обмоткам возбуждения 26-3 силовыми контакторными элементами реостатного контроллера 10-15 (фиг.1) подключаются шунтирующие резисторы.
Недостатком такого способа перехода с одной позиции на другую, под контролем блока реле ускорения 52 (фиг.2), когда значение тока уставки постоянно, является недоиспользование мощности электропоезда. Обычно машинист, с целью снижения динамических реакций в поезде при отключении тяги в случае необходимости, когда скорость не превышает 40-50 км/ч, пользуется 3 положением переключателя тока уставки (210 А). Как видно из пусковой диаграммы (фиг.5), если необходимо выполнить разгон поезда до скорости 100 км/ч, при данном значении тока уставки реостатный контроллер не успевает перейти на позицию N, а изменять значение тока уставки в процессе разгона вручную посредством переключателя величины тока уставки неудобно.
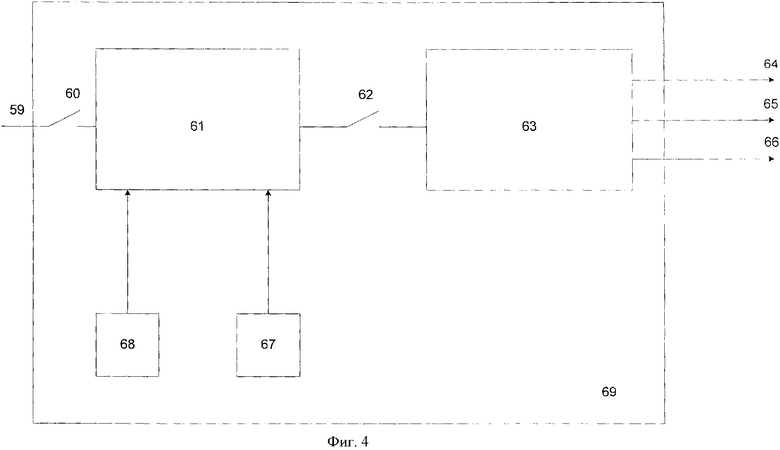
Предлагаемый способ отличается от ныне существующего тем, что управление электропневматическими вентилями реостатного контроллера осуществляется не блоком реле ускорения 52 (фиг.2), а непосредственно системой ведения пригородного электропоезда САВПЭ [1, 529-536]. Структура САВПЭ приведена на фиг.4. САВПЭ состоит из блока центрального процессора 61, отвечающего за программное обеспечение, ввод текущей информации; блока коммутации и сопряжения 63, посредством которого включаются или отключаются линейные контакторы 34 и 44 (фиг.1), а также другие элементы схемы, которые на данных фигурах не указаны, так как не отражают сути способа переключения; датчика пути и скорости 68, отслеживающего текущую координату электропоезда и фактическую скорость; тумблера 60 питания системы и тумблера 62 «выходные цепи».
Таким образом, изменив программное обеспечение блока центрального процессора 61 и подключив электропневматические вентили через провода 65, 66 (фиг.4), можно обеспечить плавное в зависимости от фактической скорости движения изменение величины уставки тока в диапазоне от 140 до 410 А [1, стр.366]. За машинистом остается право ограничивать верхнее предельное значение тока уставки, но, очевидно, необходимости в этой операции не возникнет, т.к предложенному способу такое предельное значение будет определяться автоматически блоком центрального процессора 61. Управление другими элементами силовой схемы блоком коммутации 63 по-прежнему осуществляется по проводу 66.
Обычно САВПЭ дополняется блоком 67 регистрации параметров движения РПДА (фиг.4), который отслеживает ток тяговых двигателей, напряжение контактной сети и другие параметры с последующей записью на специальные накопители информации - картриджи. Получая от блока 67 текущие значения тока, а от датчика пути и скорости 68 текущие значения скорости в процессе движения, блок 61 центрального процессора обеспечит расчет момента возможности перехода на очередную позицию вала реостатного контроллера в зависимости от скорости и тока. Такая зависимость может быть описана следующей формулой:
Iу=Iуi·k(Vф),
где Iу - расчетное значение тока уставки,
k - коэффициент приращения,
Vф- фактическая скорость движения,
Iуi - предыдущее значение тока уставки, предшествующего переключению вала реостатного контроллера.
На фиг.5 показаны три варианта переключения реостатного контроллера при изменении тока уставки в зависимости от скорости движения, переход на 20 позицию реостатного контроллера происходит при скорости 80, 73 или 62 км/ч.
В настоящее время позиции S, Q, J (фиг.3) не являются рабочими и служат для промежуточного перехода, т.е. вал реостатного контроллера не может фиксироваться на данных позициях при токе уставки меньше установленного значения. Согласно предлагаемому способу, когда электропневматические вентили 54 и 55 (фиг.2). непосредственно подключаются через блок 63 коммутации и сопряжения к САВПЭ (поз.69 фиг.4) и блоком 61 центрального процессора определяется наиболее рациональное значение средней скорости движения, близкой к характеристикам, которые не являются рабочими - S, Q, J, имеется возможность использовать эти характеристики как рабочие методом фиксации реостатного контроллера на одной из этих позиций в соответствии с логическим решением САВПЭ.
Источник информации
Просвирин Б.К. Электропоезда постоянного тока: Учебное пособие. - М.: УМК МПС России, 2001. - 699 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУППОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 2006 |
|
RU2331131C1 |
| УСТРОЙСТВО для БЕСКОНТАКТНОГО УПРАВЛЕНИЯ РЕОСТАТНЫМ КОНТРОЛЛЕРОМ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 1966 |
|
SU184291A1 |
| Устройство для управления тяговым электроприводом постоянного тока транспортного средства | 1984 |
|
SU1270039A1 |
| Устройство управления песочницами моторных вагонов электропроезда | 1978 |
|
SU740536A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
| СИСТЕМА ТОРМОЖЕНИЯ АВТОМАТИЧЕСКАЯ РЕОСТАТНАЯ И СПОСОБ ЕЕ РАБОТЫ | 2023 |
|
RU2818593C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПОВЫШЕНИЯ СЦЕПЛЕНИЯ | 2008 |
|
RU2398685C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМ РЕОСТАТНЫМ ТОРМОЗОМ ЭЛЕКТРОВОЗА ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2502625C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКА | 1990 |
|
RU2029688C1 |
Изобретение относится к области электроподвижного состава железнодорожного транспорта и решает задачу переключения режимов работы тяговых электродвигателей. Переключение режимов работы электродвигателей осуществляется реостатным контроллером, вал которого вращается приводом Решетова, посредством поочередного включения электропневматических вентилей, подключенных к блоку коммутации и сопряжения системы автоматического ведения пригородного электропоезда (САВПЭ). На блок центрального процессора и индикации САВПЭ, по каналам обратной связи, от датчика пути и скорости поступает информация о текущем значении скорости, а от регистратора параметров движения (РПДА) - текущее значение тока. В зависимости от текущих значений тока и скорости блок центрального процессора принимает логические решения о возможности подачи команды на включение определенного электропневматического вентиля по проводам, а блок коммутации и сопряжения обеспечивает включение этого вентиля. Технический результат заключается в обеспечении возможности выполнять переключение позиций реостатного контроллера при постепенном повышении тока уставки тяговых электродвигателей, а также в улучшении использования мощности электропоезда. 5 ил.
Способ переключения режимов работы тяговых электродвигателей путем переключения силовых контактных элементов, воздействующих на пусковые сопротивления посредством реостатного контроллера, на вал которого воздействуют электропневматическими вентилями, обеспечивая переключение резисторов, шунтирующих обмотки возбуждения, отличающийся тем, что управление электропневматическими вентилями реостатного контроллера осуществляют системой ведения пригородного электропоезда, имеющей блок регистрации параметров движения, при этом управляющее воздействие на реостатный контроллер для перехода его на другую позицию проводят в зависимости от скорости и силы тока.
| Устройство для регулирования мощности электровоза | 1973 |
|
SU507466A1 |
| RU 2004121792, 10.01.2006 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |
| US 5340062, 23.08.1994. | |||

