Изобретение относится к железнодорожному транспорту и может быть использовано для автоматизации управления движением пассажирских электровозов.
Известно устройство для регистрации параметров движения поезда, содержащее датчик пути и скорости, датчик меток времени, датчик давления в тормозной магистрали, выход датчика пути и скорости подключен к входам блока определения пройденного пути и блока определения скорости, второй вход блока определения скорости соединен с выходом датчика меток времени, входом блока определения текущего времени и входом элемента И, второй вход элемента И соединен с выходами элемента задания режима ручного управления и порогового элемента, выход элемента И соединен с входом элемента ИЛИ, второй вход которого соединен с выходом блока определения пройденного пути, а выход - с входом управления регистратора. Информационные входы регистратора соединены с выходами датчика давления в тормозной магистрали, блока определения текущего времени и блока определения скорости. Выход блока определения скорости связан также с входом порогового элемента (см. RU 2041100, B 61 L 25/02, 1995).
Известное устройство позволяет машинисту иметь оперативные сведения о параметрах движения поезда, о состоянии его тормозной системы на стоянке и при движении.
Однако это устройство не позволяет осуществлять автоматизированное управление движением пассажирского электровоза.
Наиболее близкой по технической сущности является система управления движением электропоезда, содержащая датчик пути и скорости, выход которого подключен к блоку определения скорости, генератор временных меток, выход которого подключен к блоку определения текущего времени и второму входу блока определения скорости, датчик давления, установленный на тормозной магистрали, пульт управления, подключенный к цепям управления электропоезда, блок управления режимом тяги и блок управления режимом торможения, вычислительный блок, блок памяти, тактовый генератор, контроллер, два дешифратора, блок управления, три блока сопряжения, блок индикации и блок речевого информатора, причем блок определения скорости, генератор временных меток, блок определения текущего времени и пульт управления подключены соответственно к первому, второму, третьему, четвертому и пятому входам первого блока сопряжения, выход которого соединен с первым входом вычислительного блока, к второму, третьему и четвертому входам которого подключены соответственно блок управления, блок памяти и тактовый генератор, причем тактовый генератор соединен с шестым входом первого блока сопряжения, блок управления через контроллер подключен к блоку памяти, первый выход вычислительного блока через второй блок сопряжения соединен с блоком индикации, второй выход вычислительного блока через третий блок сопряжения соединен с блоком речевого информатора, третий выход вычислительного блока через первый дешифратор подключен к блоку управления режимом тяги, четвертый выход вычислительного блока через второй дешифратор подключен к блоку управления режимом торможения, выходы блока управления режимом тяги, блока управления режимом торможения подключены к цепям управления электропоезда, выход блока управления режимом тяги подключен также к седьмому входу первого блока сопряжения (см. RU 2213669, B 60 L 15/40, B 61 L 3/20, 2003).
Однако это устройство не позволяет осуществлять автоматизированное управление движением пассажирского электровоза с расчетом энергооптимального режима движения в реальном времени с учетом сложившейся поездной обстановки, поскольку в прототипе расчет оптимальной траектории производится предварительно на АРМе и не учитывает временные ограничения скорости, задержку в движении по запрещающим показаниям светофоров, задержки по отправлению. Прототип также на позволяет управлять пневматическими тормозами электровоза и поезда и не обеспечивает набор позиций контроллера с контролем допустимых токов на тяговых двигателях.
Предлагается новое устройство, технический результат которого заключается в автоматизации управления движением пассажирского поезда, включая пуск и разгон с контролем допустимого тока на тяговых двигателях, расчет в реальном времени режима ведения поезда на перегонах в зависимости от реальной поездной обстановки на участке и автоматическую реализацию этого режима, подтормаживание при выполнении ограничений скорости, точное торможение под сигналы, требующие снижения скорости (желтый, красно-желтый сигналы локомотивного светофора) как электропневматическими, электродинамическими, так и пневматическими тормозами электровоза и поезда, а также отображение информации о текущей и оптимальной динамике движения пассажирского поезда.
Технический результат заключается также в повышении точности выполнения графика движения поезда, в снижении расхода электроэнергии на тягу пассажирского поезда, в повышении безопасности движения, в снижении психофизиологической нагрузки на машиниста пассажирского электровоза.
Технический результат достигается тем, что в систему управления движением пассажирского электровоза, содержащую датчик пути и скорости, выход которого подключен к блоку определения скорости, генератор временных меток, выход которого подключен к блоку определения текущего времени и второму входу блока определения скорости, датчик давления, установленный на тормозном цилиндре, пульт управления, подключенный к цепям управления электровоза, блок управления режимом тяги и блок управления режимом торможения, вычислительный блок, блок памяти, тактовый генератор, контроллер, два дешифратора, блок управления, три блока сопряжения, блок индикации и блок речевого информатора, причем блок определения скорости, генератор временных меток, блок определения текущего времени, датчик давления, пульт управления подключены соответственно к первому, второму, третьему, четвертому и пятому входам первого блока сопряжения, выход которого соединен с первым входом вычислительного блока, к второму, третьему и четвертому входам которого подключены соответственно блок управления, блок памяти и тактовый генератор, причем тактовый генератор соединен с шестым входом первого блока сопряжения, блок управления через контроллер подключен к блоку памяти, первый выход вычислительного блока через второй блок сопряжения соединен с блоком индикации, второй выход вычислительного блока через третий блок сопряжения соединен с блоком речевого информатора, третий выход вычислительного блока через первый дешифратор подключен к блоку управления режимом тяги, четвертый выход вычислительного блока через второй дешифратор подключен к блоку управления режимом торможения, выходы блока управления режимом тяги, блока управления режимом торможения подключены к цепям управления пассажирского электровоза, выход блока управления режимом тяги подключен также к седьмому входу первого блока сопряжения, введены второй датчик давления, блок измерения напряжения в контактной сети и токов на тяговых двигателях, снабженный последовательным портом, вычислительный блок снабжен дополнительным последовательным портом, при этом второй датчик давления, предназначенный для контроля отпуска тормозов со сверхзарядкой тормозной магистрали, установлен на уравнительном резервуаре и подключен к восьмому входу первого блока сопряжения, а блок измерения напряжения в контактной сети и токов на тяговых двигателях через последовательный порт подключен к дополнительному последовательному порту вычислительного блока, который выполнен с возможностью вычисления им оптимального скоростного режима движения в реальном времени, минимизирующего затраченную энергию на тягу.
На чертеже представлена структурная схема системы управления движением пассажирского электровоза.
Устройство содержит датчик 1 пути и скорости, выход которого подключен к блоку 2 определения скорости, генератор 3 временных меток, выход которого подключен к блоку 4 определения текущего времени и второму входу блока 2 определения скорости, датчики 5 и 23 давления, установленные соответственно на тормозном цилиндре и уравнительном резервуаре, блок 6 измерения напряжения в контактной сети и токов на тяговых двигателях, пульт 7 управления. Блок 2 определения скорости, генератор 3 временных меток, блок 4 определения текущего времени, датчики 5 и 23 давления, пульт 7 управления подключены соответственно к первому, второму, третьему, четвертому, восьмому и пятому входам первого блока 8 сопряжения, выход которого соединен с первым входом вычислительного блока 9, ко второму, третьему и четвертому входам которого подключены соответственно блок 10 управления, блок 11 памяти и тактовый генератор 12, причем тактовый генератор 12 соединен с шестым входом первого блока 8 сопряжения, блок 10 управления через контроллер 13 подключен к блоку памяти, первый выход вычислительного блока 9 через второй блок сопряжения 14 соединен с блоком 15 индикации, второй выход вычислительного блока 9 через третий блок 16 сопряжения соединен с блоком 17 речевого информатора, третий выход вычислительного блока 9 через первый дешифратор 18 подключен к блоку 19 управления режимом тяги, четвертый выход вычислительного блока 9 через второй дешифратор 20 подключен к блоку 21 управления режимом торможения, выходы блока 19 управления режимом тяги, блока 21 управления режимом торможения подключены к цепям 22 управления электровоза, выход блока 19 управления режимом тяги подключен также к седьмому входу первого блока 8 сопряжения. Блок 6 измерения напряжения в контактной сети и токов на тяговых двигателях подключен по последовательному каналу к вычислительному блоку.
Датчик 1 пути и скорости (ДПС) устанавливается на буксу колесной пары пассажирского электровоза и служит для получения последовательности импульсов, частота которых пропорциональна скорости вращения колесной пары и соответственно скорости движения. С осью колесной пары механически связан диск модулятора, который с помощью, например оптопары, преобразует частоту вращения колесной пары в последовательность импульсов. Блок 2 определения скорости вычисляет скорость движения путем подсчета количества импульсов от датчика 1 пути и скорости на заданном интервале времени с последующим умножением на коэффициент, пропорциональный диаметру колеса. Значение интервала времени поступает с выхода генератора 3 временных меток. Генератор 3 временных меток представляет собой кварцевый генератор с делителем частоты. Он формирует стабильное значение интервалов времени, которые поступают в блок 2 определения скорости и в блок 4 определения текущего времени. Блок 4 определения текущего времени выполнен на базе делителей частоты. Он формирует выходной сигнал, представляющий собой код секунд, минут и часов текущего астрономического времени. Датчики 5 и 23 давления устанавливаются на трубопроводе тормозных цилиндров и уравнительном резервуаре. Они представляет собой электромеханические преобразователи давления в электрический сигнал, например, - ток. Блок измерения 6 напряжения в контактной сети и токов на тяговых двигателях устанавливается в высоковольтной камере и состоит из высоковольтного делителя, выход которого поступает на мультиплексор и с его выхода на АЦП и далее на контроллер, каналы измерения токов на тяговых двигателях также заводятся на мультиплексор и оцифровываются АЦП, результаты измерения передаются в вычислительный блок по последовательному каналу. Пульт 7 управления состоит из контроллера машиниста, с помощью которого машинист в ручном режиме управляет пассажирским электровозом в режиме тяги и электродинамического торможения и крана машиниста для управления электропневматическим и пневматическим торможениями. Если машинист принимает решение управлять пассажирским электровозом вручную от указанных органов управления, в первый блок 8 сопряжения поступает соответствующий сигнал и система управления переходит в режим советчика. Кроме того, от пульта 7 управления поступают релейные сигналы о наличии напряжения в контактной сети, о срабатывании автостопа и сигнал о боксовании колесных пар пассажирского электровоза. Также от пульта управления поступают сигналы автоматической локомотивной сигнализации о допустимых скоростях движения, которые формируются штатной системой безопасности и они повторяют сигналы напольных светофоров. Система управления движением пассажирского электровоза с пульта 7 управления получает следующие потенциальные сигналы автоматической локомотивной сигнализации: зеленый огонь - разрешается движение; на путевом светофоре, к которому приближается поезд, горит зеленый огонь, желтый огонь - разрешается движение; на путевом светофоре, к которому приближается поезд, горит один или два желтых огня, красно-желтый огонь - разрешается движение с готовностью остановиться; на путевом светофоре, к которому приближается поезд, горит красный огонь, белый огонь указывает, что локомотивные устройства включены, но показания путевых светофоров на локомотивный светофор не передаются. Первый блок 8 сопряжения преобразует сигналы разного вида от блоков 2, 3, 4, 5, 23, 7 и 12 в цифровой код, который по параллельному порту передается в вычислительный блок 9, который построен на базе процессора. Синхронизация работы вычислительного блока 9 и первого блока 8 сопряжения осуществляется от тактового генератора 12. Вычислительный блок 9 (процессор) по заданному алгоритму вырабатывает коды команд для дешифраторов 18, 20 и блоков сопряжения 14, 16. Входные данные в вычислительный блок 9 поступают из блока 11 памяти, а сигналы обратной связи с выхода первого блока 8 сопряжения. Блок 11 памяти выполнен на ППЗУ и предназначен для хранения базы данных для управления движением пассажирским электровозом. Контроллер 13 представляет собой микропроцессорный модуль, обеспечивающий считывание информации из блока 11 памяти в вычислительный блок 9. Блок 10 управления состоит из кнопочной клавиатуры и микроконтроллера, предназначенного для формирования кодовых посылок в вычислительный блок 9. Блок 10 управления служит для задания режимов работы системы и оперативной коррекции параметров управления. Второй и третий блоки 14 и 16 сопряжения предназначены соответственно для управления режимом отображения информации на блоке 15 индикации и для управления режимом выдачи речевой информации блоком 17. Второй блок 14 сопряжения, в частности, может состоять из ОЗУ для хранения информации, ПЗУ знакогенератора и порта ввода данных из вычислительного блока 9, а блок 15 индикации может быть выполнен на основе вакуумного люминесцентного индикатора, содержащего, например, 4 строки по 20 символов. Дешифраторы 18 и 20 состоят из буферных регистров и микроконтроллеров, обеспечивающих преобразование кодов команд вычислительного блока 9 в сигналы управления блоками 19 и 21. На выходе первого дешифратора 18 формируются сигналы управления, соответствующие следующим командам: запрет тяги, набор одной позиции, сброс одной позиции, автоматический набор до ходовой позиции, автоматический сброс до ходовой позиции, автоматический сброс до нулевой позиции, фиксация позиции, набор одной позиции ослабления поля тяговых электродвигателей, сброс одной позиции ослабления поля тяговых электродвигателей. На выходе второго дешифратора 20 формируются сигналы управления соответствующие следующим командам: перекрыша - поддержание установленного в предыдущем такте давления в тормозных цилиндрах в режиме пневматического, электропневматического или электродинамического торможения, тормоз - увеличение давления в тормозных цилиндрах в режиме пневматического, электропневматического или электродинамического торможения, отпуск - уменьшение давления в тормозных цилиндрах в режиме электропневматического или электродинамического торможения, полный отпуск - уменьшение давления до 0 МПа в тормозных цилиндрах в режиме пневматического, электропневматического или электродинамического торможения. Блоки 19, 20 управления режимами тяги и торможения выполнены на ключевых модулях, например твердотельных реле, обеспечивающих подачу напряжения питания в соответствующие цепи 22 управления электровозом. Цепи 22 управления пассажирского электровоза представляют собой контактные группы контроллера и крана машиниста. Блоки 19 и 21 управления режимами тяги и торможения подключены параллельно указанным контактным группам. Тактовый генератор 12 выполнен на основе кварцевого резонатора и служит для синхронизации работы вычислительного блока 9 и первого блока сопряжения 8. Третий блок 16 сопряжения, в частности, может содержать ППЗУ для хранения программы формирования звука, а также звуковые файлы для выдачи речевых сообщений и буферные регистры для сопряжения с блоком процессора, а блок 17 речевого информатора может быть выполнен на основе цифрового сигнального процессора, ЦАП и УНЧ.
База данных для системы управления движением пассажирским электровозом, которая заносится в блок 11 памяти, создается с помощью специального автоматизированного рабочего места (АРМ) и содержит: расписание движения, характеристики электровоза, профиль и план пути, расположение путевых объектов, постоянные ограничения скорости.
Устройство работает следующим образом.
Режим тяги. Для приведения пассажирского электровоза в движение машинист с помощью блока управления 10 выдает команду "Пуск", которая подается в вычислительный блок 9 и на вход контроллера 13. При этом из блока 11 памяти под управлением контроллера 13 переписывается в вычислительный блок 9 информация о времени хода по расписанию, а из блока 4 - текущее астрономическое время. Вычислительный блок 9 определяет время, оставшееся до проследования или прибытия поезда на следующую контрольную станцию, и производит расчет оптимальной траектории движения в пространстве скорости и пути с учетом постоянных и временных ограничений скорости, минимизирующей энергию на тягу. Траектория движения состоит из участков разгона, поддержания скорости, выбега и торможения. Так как на остановке фактическая скорость равна нулю и соответственно она меньше расчетной, то вычислительный блок 8 формирует код команды включения одной из позиций тяги, а на выходе первого дешифратора 18 вырабатывается требуемая команда, поступающая в блок 19 управления режимом тяги. В электровозе устанавливается необходимая позиция тяги, собирается силовая электрическая цепь включения тяговых электродвигателей, и поезд приходит в движение.
На выходе датчика 1 пути и скорости формируется последовательность импульсов, пропорциональная фактической скорости движения, которая поступает на вход блока 2 определения скорости движения, на второй вход которого поступает сигнал с генератора 3 временных меток. С выхода блока 2 определения скорости, сигнал о фактической скорости движения через первый блок сопряжения 8 подается в вычислительный блок 9, где сравнивается с расчетным значением скорости движения. До тех пор пока расчетная скорость движения больше фактической вычислительный блок 9 при необходимости вырабатывает код команды следующей позиции тяги, при этом максимальное значение токов на тяговых двигателях сравнивается с заданной машинистом уставкой. Если максимальный ток меньше уставки, то вычислительный блок 9 продолжает выдавать команды набора позиций, в противном случае набор позиций прекращается до тех пор, пока максимальное значение токов не станет меньше уставки.
Если в процессе разгона от пульта 7 управления поступит сигнал "боксования", то вычислительный блок 9 формирует код команды "боксование", на основании которого первый дешифратор 18 вырабатывает команду "защита от боксования", по которой блок 19 управления режимом тяги уменьшает позицию тяги, а после прекращения боксования с заданной выдержкой времени вычислительный блок 9 формирует коды команд набора позиций тяги.
Кроме того, в вычислительный блок 9 через первый блок сопряжения 8 от пульта управления 7 поступают сигналы автоматической локомотивной сигнализации (АЛСН) о состоянии огней локомотивного светофора. В случае появления сигнала, требующего снижения скорости движения вычислительный блок 9 вырабатывает команду отключения тяги и переходит в режим торможения. При этом в блок 17 речевого оповещения через третий блок 16 сопряжения поступает команда о формировании соответствующего предупредительного звукового сообщения.
Режим выбега. В режиме выбега вычислительный блок 9 осуществляет сравнение фактической скорости, поступающей из блока 2 определения скорости с рассчитанной энергооптимальной траекторией. Если траектория движения на выбеге отличается от расчетной на величину, большую величины заданного порога, то вычислительный блок 9 вырабатывает код команды "включение позиции тяги".
Режим поддержания скорости. В режиме поддержания скорости вычислительный блок 9 осуществляет сравнение фактической скорости движения, поступающей из блока 2 определения скорости, с рассчитанным значением. Если фактическая скорость лежит внутри задаваемого при настройке "коридора", то никаких дополнительных команд не выдается. Если фактическая скорость становится меньше нижнего порога, то выдается команда набора тяги, которая затем отменяется при достижении расчетной скорости. Если фактическая скорость превышает верхний порог допустимого коридора, то в зависимости от профиля и режима движения выдается либо команда торможения, или сброса тяги.
Режим торможения. В режиме торможения вычислительный блок 9 производит расчет тормозной кривой исходя из начальной и конечной скоростей, расстояния до точки, где необходимо обеспечить конечную скорость и реальной эффективности тормозов. Если указанная разность превышает заданный порог, то вычислительный блок 9 вырабатывает код команды "тормоз", которая через второй дешифратор 20 подается в блок 21 управления режимом торможения, а из него в цепи 22 управления электровозом. Электровоз начинает снижать скорость движения, отрабатывая "тормозную кривую" под контролем вычислительного блока 9. Значение давления в тормозных цилиндрах и соответственно значение тормозной силы в вычислительный блок 9 поступает от датчика 5 давления. Вычислительный блок 9 осуществляет коррекцию расчетной "тормозной кривой" таким образом, чтобы скорость движения поезда была равна заданной. При достижении требуемой скорости вычислительный блок 9 выдает команду отпуск тормозов, которая через второй дешифратор 20 подается в блок 21 управления режимом торможения, а из него в цепи 22 управления электровозом. При отпуске тормозов производится контроль давления в уравнительном резервуаре с помощью второго датчика 23 давления, обеспечивая сверхзарядку тормозной магистрали до давления 5,1-5,2 атм.
В любом из рассмотренных режимов машинист с помощью пульта 7 управления может вмешаться в процесс управления поездом. В этом случае через первый блок сопряжения 8 вычислительный блок 9 переводится в режим советчика. В блоке 15 индикации отображается рекомендуемый режим ведения поезда, а коды команд на входы дешифраторов 18 и 20 не поступают.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2006 |
|
RU2320498C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2011 |
|
RU2468951C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВЕДЕНИЯ ГРУЗОВОГО ПОЕЗДА | 2005 |
|
RU2299144C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВИЖНОГО СОСТАВА | 2019 |
|
RU2740418C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВЕДЕНИЯ ГРУЗОВОГО ПОЕЗДА С РЕГУЛЯТОРОМ СКОРОСТИ, АДАПТИРОВАННЫМ К ЕЗДЕ ПО КОНКРЕТНОМУ ПРОФИЛЮ ПУТИ | 2017 |
|
RU2667679C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВЕДЕНИЯ ГРУЗОВОГО ПОЕЗДА ПО ОПЕРАТИВНОМУ РАСПИСАНИЮ ДВИЖЕНИЯ | 2013 |
|
RU2540683C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Система для контроля и регулирования мощности и энергии, расходуемой транспортной системой | 2023 |
|
RU2811608C1 |
Изобретение относится к железнодорожному транспорту и предназначено для использования при автоматизации управления движением пассажирских электровозов. Система содержит датчик пути и скорости, блок определения скорости, генератор временных меток, блок определения текущего времени, датчик давления, установленный на тормозном цилиндре, пульт управления, блок управления режимом тяги, блок управления режимом торможения, вычислительный блок, блок памяти, тактовый генератор, контроллер, два дешифратора, блок управления, предназначенный для задания режимов работы и коррекции параметров управления, три блока сопряжения, блок индикации и блок речевого информатора. В систему также введены второй датчик давления, установленный на уравнительном резервуаре и предназначенный для контроля отпуска тормозов со сверхзарядкой тормозной магистрали, а также блок измерения напряжения в контактной сети и токов на тяговых двигателях. Вычислительный блок выполнен с возможностью вычисления оптимального скоростного режима движения в реальном времени, минимизирующего затраченную на тягу энергию. Система работает в режимах тяги, выбега, поддержания скорости и торможения. Технический результат заключается в повышении точности выполнения графика движения поездов, снижении расхода электроэнергии на тягу пассажирского поезда, повышении безопасности движения и снижении психофизиологической нагрузки на машиниста. 1 ил.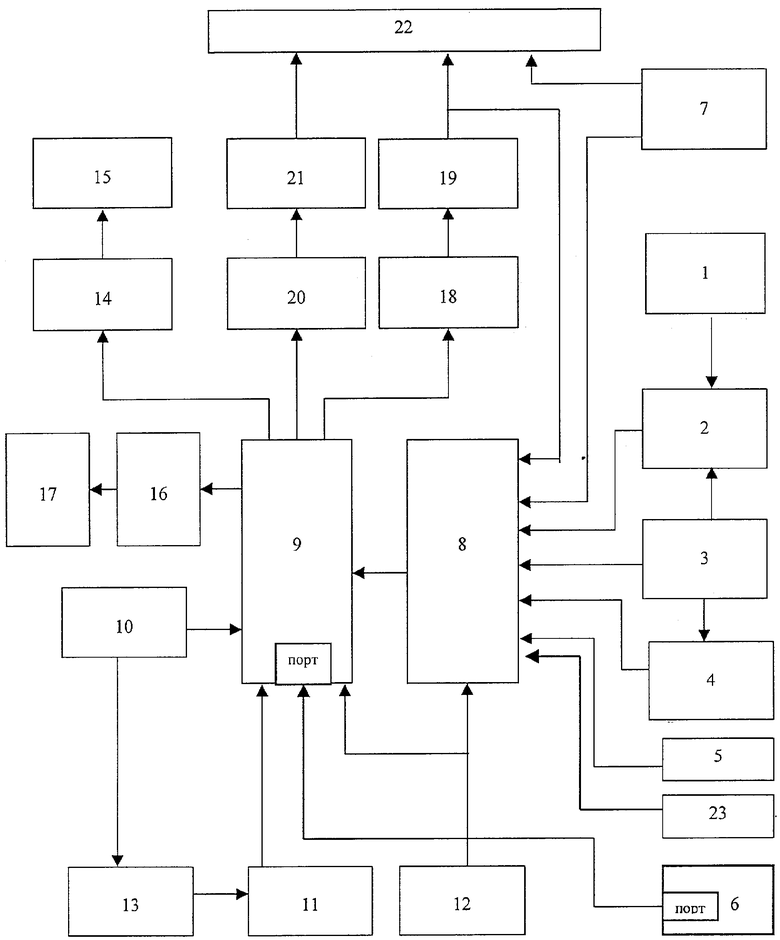
Система управления движением пассажирского электровоза, содержащая датчик пути и скорости, выход которого подключен к первому входу блока определения скорости, генератор временных меток, выход которого подключен к входу блока определения текущего времени и второму входу блока определения скорости, первый датчик давления, установленный на тормозном цилиндре, пульт управления, подключенный к цепям управления электровоза, блок управления режимом тяги и блок управления режимом торможения, вычислительный блок, блок памяти, тактовый генератор, контроллер, два дешифратора, блок управления, предназначенный для задания режимов работы и коррекции параметров управления, три блока сопряжения, блок индикации и блок речевого информатора, причем выходы блока определения скорости, генератора временных меток, блока определения текущего времени, первого датчика давления, пульта управления подключены соответственно к первому, второму, третьему, четвертому и пятому входам первого блока сопряжения, выход которого соединен с первым входом вычислительного блока, к второму, третьему и четвертому входам которого подключены соответственно первый выход блока управления и выходы блока памяти и тактового генератора, причем тактовый генератор соединен с шестым входом первого блока сопряжения, второй выход блока управления через контроллер подключен к входу блока памяти, первый выход вычислительного блока через второй блок сопряжения соединен с входом блока индикации, второй выход вычислительного блока через третий блок сопряжения соединен с входом блока речевого информатора, третий выход вычислительного блока через первый дешифратор подключен к входу блока управления режимом тяги, четвертый выход вычислительного блока через второй дешифратор подключен к входу блока управления режимом торможения, выходы блока управления режимом тяги, блока управления режимом торможения подключены к цепям управления пассажирского электровоза, выход блока управления режимом тяги подключен также к седьмому входу первого блока сопряжения, отличающаяся тем, что в нее введены второй датчик давления, предназначенный для контроля отпуска тормозов со сверхзарядкой тормозной магистрали, и блок измерения напряжения в контактной сети и токов на тяговых двигателях, снабженный последовательным портом, а вычислительный блок снабжен дополнительным последовательным портом, при этом второй датчик давления установлен на уравнительном резервуаре и подключен выходом к восьмому входу первого блока сопряжения, а блок измерения напряжения в контактной сети и токов на тяговых двигателях через последовательный порт подключен к дополнительному последовательному порту вычислительного блока, который выполнен с возможностью вычисления им оптимального скоростного режима движения в реальном времени, минимизирующего затраченную на тягу энергию.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОЕЗДА | 1992 |
|
RU2041100C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ СКОРОСТИ, ОСТАНОВКИ И ОБЕСПЕЧЕНИЯ УПРАВЛЕНИЯ ТРАНСПОРТОМ | 1992 |
|
RU2068361C1 |
| US 5340062 A, 23.08.1994. | |||

