Область техники
Настоящее изобретение относится к машине для нанесения этикеток. В частности, изобретение относится к машине, предназначенной для нанесения этикеток на контейнеры различных типов, в которой контейнеры перемещаются на конвейере, снабженном устройствами, предназначенными для контроля и регулировки углового положения контейнеров.
Уровень техники
Как правило, в машинах такого типа перемещение контейнеров осуществляется с помощью вращающейся карусели, представляющей собой диск, несущий множество опорных подставок, расположенных по его окружности через равные угловые интервалы. Каждая опорная подставка, служащая опорой для соответствующего контейнера, может поворачиваться посредством механического привода вокруг оси этого контейнера.
Конвейер направляет контейнеры по траектории, проходящей через устройство для нанесение этикеток, к которому каждый контейнер подходит определенной частью его боковой поверхности.
Для управления угловым положением установленных на опорных подставках контейнеров, таким образом, чтобы они всегда имели правильное положение при введении в устройство для нанесения этикеток, в уровне техники используются оптические датчики, соединенные с блоком управления, управляющим двигателями, связанными с отдельными опорными подставками.
В качестве оптических датчиков могут использоваться фотоэлементы, обнаруживающие, например, отметку на каждом контейнере, или телевизионные камеры, обрабатывающие более сложные эталонные изображения.
Однако в случае использования фотоэлементов каждый контейнер должен быть снабжен эталонной отметкой, расположенной в месте, где ее хорошо видно. Кроме того, есть ограничения на геометрическую форму контейнера, например он не должен иметь острых краев, а его наружная поверхность должна быть обработана так, чтобы она как можно меньше отражала свет, и цвет ее должен позволять легко считывать эталонные отметки. Все это ограничивает сферу применения и надежность известных устройств, особенно с учетом изменения размеров, формы и других характеристик контейнеров.
С другой стороны, использование телевизионных камер сопряжено с очень высокой стоимостью и необходимостью в сложных системах обработки изображения и потому невыгодно для осуществления контроля в машинах такого типа. Кроме того, телевизионная камера может работать только при определенной освещенности и при определенном уровне отражения от поверхности контейнера.
Целью настоящего изобретения является создание машины для нанесения этикеток, лишенной упомянутых выше недостатков.
Раскрытие изобретения
Указанная цель достигается в машине для нанесения этикеток, отличительные особенности которой описаны в одном или нескольких пунктах формулы изобретения.
Далее изобретение будет подробно описано на примере его осуществления со ссылками на прилагаемые чертежи, на которых:
фиг.1 схематично изображает в плане часть устройства для наполнения контейнеров, содержащего машину для нанесения этикеток согласно изобретению, и
фиг.2 изображает сбоку в увеличенном масштабе фрагмент фиг.1 без некоторых элементов.
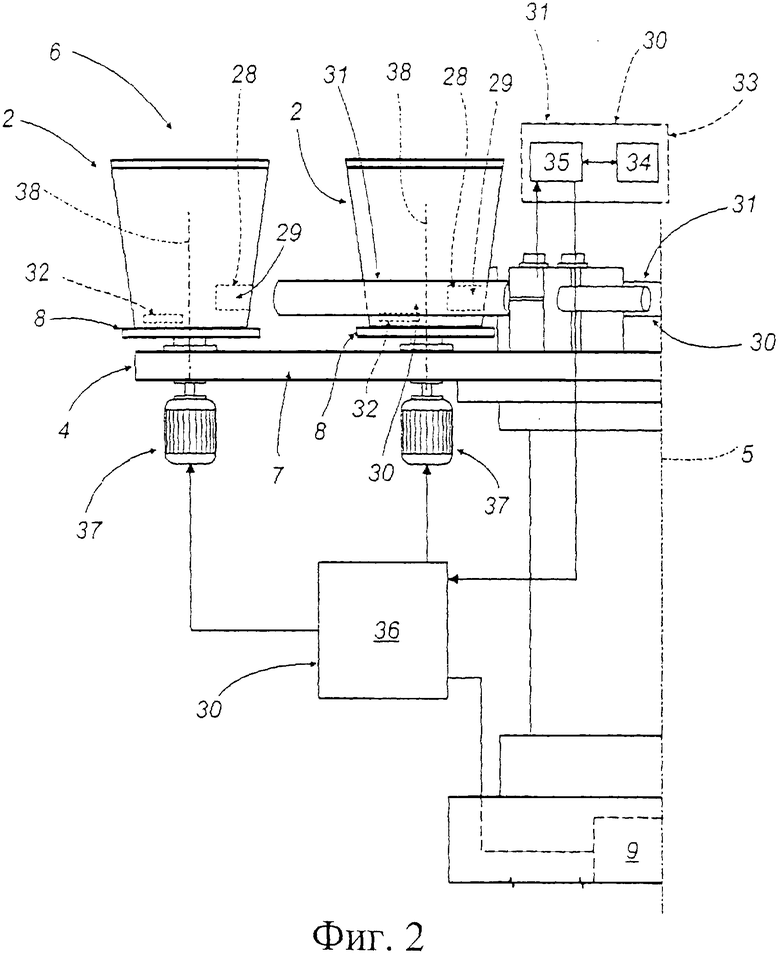
На фиг.1 цифровой позицией 1 обозначена часть устройства для наполнения контейнеров 2 жидкими или порошковыми продуктами. Устройство 1 содержит машину для нанесения этикеток и/или для маркировки, обозначенную в целом позицией 3. Эта машина содержит подающий конвейер 4, установленный с возможностью вращения вокруг вертикальной оси 5 и выполненный в виде карусели 6, снабженной на дне круглой платформой 7, по окружности которой установлено множество опорных подставок 8, расположенных с равными угловыми интервалами друг от друга. Каждая подставка служит опорой для соответствующего контейнера 2.
Карусель 6, приводимая во вращение вокруг оси 5 по часовой стрелке на фиг.1 соответствующим двигателем 9 (см. фиг.2), расположена так, что она принимает следующие один за другим от подающего устройства 10 контейнеры 2, каждый из которых направляется к соответствующей опорной подставке 8 подающим блоком 11 известного типа, вращающимся против часовой стрелки вокруг оси 12, параллельной оси 5 карусели. Подающий блок 11 содержит платформу 13 и расположенный над ней диск 14, имеющий по окружности множество выемок 15, каждая из которых служит для размещения соответствующего контейнера 2, стоящего на платформе 13. Контейнеры 2 поступают к подающему блоку 11 в одном ряду по первому прямолинейному конвейеру 16.
Карусель 6 перемещает контейнеры 2 от подающего устройства 10 по круговой транспортировочной траектории 17, которая оканчивается у приемного устройства 18, где они забираются приемным блоком 19 известного типа, по существу идентичным подающему блоку 11. Приемный блок 19, вращающийся против часовой стрелки вокруг оси 20, параллельной оси 6 карусели, содержит платформу 21 и расположенный над ней диск 22, имеющий по окружности множество выемок 3, каждая из которых служит для размещения соответствующего контейнера 2, стоящего на платформе 21. Затем контейнеры 2 один за другим выводятся из приемного блока 19 вторым прямолинейным конвейером 24 и транспортируются к следующей машине, схематично изображенной в виде прямоугольника 25.
На фиг.1 также схематично изображены первое и второе устройства известного типа, представляющие собой аппликатор и/или маркировочное устройство, обозначенные соответственно позициями 26 и 27. Эти устройства установлены вдоль конечного участка транспортировочной траектории 17. Функция аппликатора состоит в прикреплении этикетки (не показана) к заданному участку 28 боковой поверхности 29 каждого контейнера 2, а функция маркировочного устройства - в нанесении на том же заданном участке боковой поверхности надписи и/или изображения, и/или логотипа, или графического символа. Устройства 26 и 27 могут быть оба аппликаторами этикеток или оба маркировочными устройствами, или же одно из них может быть аппликатором, а другое - маркировочным устройством.
Как показано на фиг.1 и 2, вращающийся конвейер 4 содержит средства определения и управления, установленные на круглой платформе 7 и связанные с каждой опорной подставкой 8. Эти средства, обозначенные в целом позицией 30, содержат датчики 31 изображения типа приборов с зарядовой связью (ПЗС), способные обнаруживать и распознавать на боковой поверхности 29 контейнера 2 заданный контур 32, играющий роль ориентира для правильного размещения этикетки и/или маркировки. На каждую опорную подставку 8 приходится по одному ПЗС-датчику 31.
Отдельные ПЗС-датчики 31 изображения обычного типа содержат модуль 33 обработки, включающий память 34 для идентификации и хранения очертаний контура-образца в качестве эталона, и модуль 35 считывания и управления для сравнения степени подобия контура-образца и контура 32, обнаруженного на поверхности 29 контейнера 2.
Средства определения и управления содержат также главный блок 36 управления, соединенный со стороны входа с модулем 33 обработки, а со стороны выхода - с двигателем 9 карусели и с группой двигателей 37, каждый из которых связан с соответствующей опорной подставкой 8, так что каждая опорная подставка 8 может поворачиваться вокруг соответствующей оси 38.
При работе машины контейнеры 2, движущиеся один за другим по первому прямолинейному конвейеру 16, поступают на подающее устройство 10, где каждый из них направляется подающим блоком 11 на соответствующую опорную подставку 8 на круглой платформе 7 карусели, которая непрерывно вращается вокруг оси 5 двигателем 9.
При перемещении контейнера 2 по круговой транспортировочной траектории 17 и повороте соответствующей опорной подставки 8 вокруг оси 38 двигателем 37 средства 30 определения и управления, в частности датчик 31 изображения, связанный с этой опорной подставкой 8, сканируют боковую поверхность 29 контейнера 2. В ходе сканирования опорная подставка 8 поворачивается вокруг своей оси и позволяет датчику 31 изображения сканировать всю боковую поверхность 29 контейнера 2, в результате чего датчик 31 идентифицирует заданный контур 32 и подает соответствующий сигнал в модуль 33 обработки, который с помощью модуля 35 считывания и управления и памяти 34 определяет степень подобия между эталонным контуром-образцом и контуром 32, обнаруженным на поверхности 29 контейнера 2.
В случае соответствия указанных контуров модуль 33 обработки посылает сигнал в главный блок 36 управления, который, в свою очередь, посылает управляющие сигналы на двигатель 37 опорной подставки 8, на которой стоит сканируемый контейнер 2, в результате чего эта подставка поворачивается на определенный угол и устанавливается в положение, соответствующее заданному положению, выбранному и запрограммированному в соответствии с положением аппликатора и/или маркировочного устройства 26, 27.
Следует отметить, что контейнеры 2 могут подводиться к аппликатору и/или маркировочному устройству 26, 27, когда опорные подставки 8 не поворачиваются или когда они продолжают поворачиваться в том или ином направлении до тех пор, пока упомянутый участок 28 боковой поверхности 29 не совпадет с местом наложения этикетки и/или с местом маркировки.
Средства определения и управления могут состоять из одного датчика 39 изображения, установленного неподвижно относительно конвейера 4. В этом случае конвейер 4 будет перемещаться двигателем 9 прерывисто, чтобы датчик 39 мог сканировать боковую поверхность 29 каждого контейнера 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕЙЕРНАЯ УСТАНОВКА ДЛЯ КОНТЕЙНЕРОВ | 2016 |
|
RU2721634C2 |
| МАРКИРОВОЧНАЯ МАШИНА | 2014 |
|
RU2652949C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПРИКРЕПЛЕНИЯ ЭТИКЕТОК НА ЕМКОСТЯХ | 2002 |
|
RU2286927C2 |
| МАШИНА И СПОСОБ МАРКИРОВКИ ИЗДЕЛИЙ | 2014 |
|
RU2628957C2 |
| СПОСОБ И МАШИНА ДЛЯ ЭТИКЕТИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ КОНТЕЙНЕРОВ ПОСРЕДСТВОМ РЯДА НЕЗАВИСИМЫХ ЭТИКЕТИРОВОЧНЫХ СТАНЦИЙ | 2003 |
|
RU2323862C2 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ И ТЕРМОУСАДКИ ПЛАСТИКОВЫХ ЭТИКЕТОК И СПОСОБ НАНЕСЕНИЯ ТАКИХ ЭТИКЕТОК | 2004 |
|
RU2333873C2 |
| МАШИННО-СЧИТЫВАЕМАЯ ЭТИКЕТКА И СПОСОБ ИДЕНТИФИКАЦИИ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ИЗДЕЛИЯ | 1992 |
|
RU2115167C1 |
| Устройство этикетировки и датировки | 2024 |
|
RU2840616C1 |
| УПРАВЛЯЕМОЕ КОМПЬЮТЕРОМ ЭТИКЕТИРОВОЧНОЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ НАКЛЕЙКИ ЭТИКЕТОК (ВАРИАНТЫ) | 1994 |
|
RU2134651C1 |
| СИСТЕМЫ И СПОСОБЫ НАНЕСЕНИЯ УСАДОЧНЫХ ЭТИКЕТОК | 2014 |
|
RU2601926C2 |
Изобретение относится к устройствам для нанесения этикеток. Машина для нанесения этикеток содержит подающий конвейер, установленный с возможностью вращения вокруг вертикальной оси и снабженный по окружности множеством опорных подставок, несущих отдельные контейнеры. Машина также содержит приводные средства, связанные соответственно с конвейером для направления контейнеров по заданной транспортировочной траектории и с отдельными опорными подставками для поворота каждой из них вокруг соответствующей вертикальной оси. Машина также содержит аппликатор, установленный вдоль заданной транспортировочной траектории, и средства определения углового положения контейнеров и управления угловым положением контейнеров. Средства определения и управления содержат множество ПЗС-датчиков изображения для обнаружения и распознавания заданного контура на контейнерах, причем указанные ПЗС-датчики изображения жестко закреплены на подающем конвейере и каждый из них связан с соответствующей опорной подставкой, несущей контейнер. Изобретение обеспечивает создание устройства со средствами определения углового положения контейнеров и управления положением контейнеров различных типов. 8 з.п. ф-лы, 2 ил.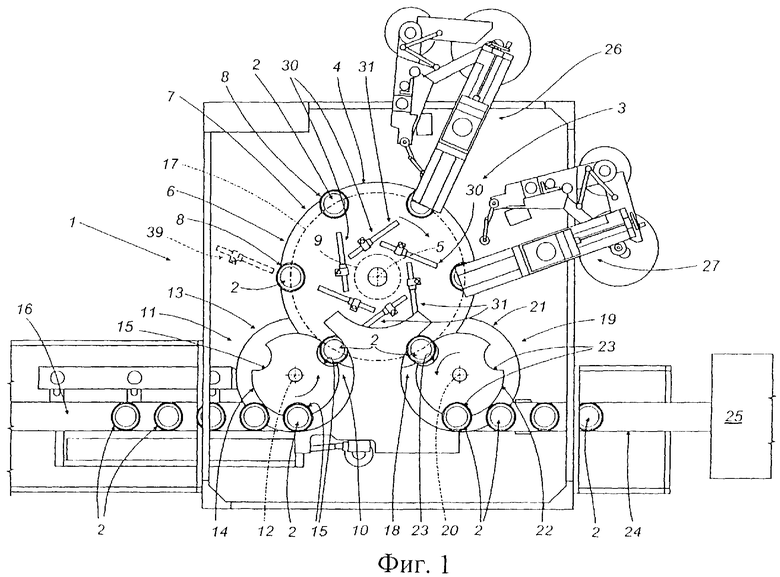
| DE 20115480 U1, 16.05.2002 | |||
| EP1197468 A1, 17.04.2002 | |||
| DE 19927668 A, 28.12.2000 | |||
| СПОСОБ НАМОТКИ ПОЛОСЫ В РУЛОН | 2007 |
|
RU2342207C1 |
| Способ упаковки швейной нити, намотанной на цилиндрический бумажный патрон крестовой намоткой, и приспособление к этикеточной машине для осуществления этого способа | 1951 |
|
SU98697A1 |

