Настоящее изобретение относится к конвейерной установке для контейнеров. В частности, настоящее изобретение относится к области рабочих установок для контейнеров, выполненных с возможностью перемещать контейнер вдоль заданного направления подачи и выполнять в процессе перемещения множество автоматических операций с ним (например, этикетирование, наполнение, укупорка и так далее) посредством заданных блоков, соединенных вдоль направления подачи.
В настоящее время конвейерные установки, используемые для работы с контейнерами, относятся по меньшей мере в большинстве случаев к типу поворотной карусели. На своей периферии карусель имеет заданные опорные базы (обычно определяемые "пластиной"), на которых размещены обрабатываемые контейнеры. В частности, карусель имеет центральную ось поворота и имеет соответствующие оси поворота для пластин, параллельные центральной оси.
Каждая пластина выполнена с возможностью поворота вокруг собственной оси за счет механического перемещения от поворота карусели (например, посредством кулачковых элементов или другим способом) или, в более современных установках, содержит собственный электрический двигатель, управляемый посредством блока управления независимо от поворота карусели.
Таким образом, контейнер, погруженный на пластину, может быть повернут в зависимости от рабочих блоков, расположенных вдоль карусели. Например, для выполнения операций этикетирования на контейнере необходимо выполнить предварительный поворот контейнера вокруг собственной оси для обнаружения положения нанесения этикетки (посредством соответствующего датчика обнаружения), чтобы затем расположить контейнер в упомянутом положении перед этикетировочным блоком или на нем.
Тем не менее, данный уровень техники содержит некоторые недостатки.
Фактически, в зависимости от требуемой скорости производства, в зависимости от количества этикеток, которое необходимо нанести на контейнер, и в зависимости от диаметра контейнера, требуется время от времени изменять диаметр карусели, количество пластин и количество блоков этикетирования. Например, карусель, имеющая диаметр 600 мм, достаточна только лишь для размещения четырех блоков этикетирования. Если необходимо добавить дополнительную этикетировочную группу или, например, лазерный принтер или систему наблюдения для контроля этикетирования, доступного свободного пространства для этого не будет, поэтому необходим будет переход к карусели с большим диаметром.
Чем больше диаметр карусели, тем больше длина ее периферии и, таким образом, тем больше возможностей присоединения модулей к ней.
Таким образом, каждая карусель имеет максимальное количество модулей, которые могут быть применены, при этом если требуется добавить другие модули, то необходимо изменить карусель (со всеми вытекающими недостатками).
Кроме того, если требуется увеличить скорость производства, необходимо увеличить количество пластин, что, конечно, подразумевает необходимость увеличения диаметра карусели. После того, как диаметр карусели и количество пластин определены, автоматически определяется шаг установки, то есть, расстояние между одним контейнером и другим.
Кроме того, дополнительно следует учесть, что нанесение этикетки на контейнер, либо с использованием проклеенной бумаги, либо в случае самоклеющейся этикетки, должно быть выполнено так, чтобы периферийные скорости этикетки и контейнера были равны (для предотвращения образования складок, взаимного скольжения или ненадлежащего размещения этикетки). Таким образом, длина этикетки, а также физические размеры контейнера, представляют собой данные, которые должны быть учтены на этапе определения размера шага установки. Другими словами, трудно реализовать нанесение этикетки, которая длиннее шага установки.
Следовательно, шаг установки также определяет максимальную длину этикетки, которая может быть нанесена.
Кроме того, поскольку периферия карусели является круглой, присоединение модулей этикетирования к ней выполняется на закругленной поверхности, что трудновыполнимо применительно к линейной установке (в настоящее время она редко используется).
Наконец, следует отметить, что для гарантии правильного нанесения этикетки на контейнер периферийные скорости контейнера и этикетки должны быть одинаковыми. Это означает, что периферийная скорость этикетки должна совпадать с произведением угловой скорости карусели и суммы радиуса карусели и радиуса контейнера. Таким образом, чем больше радиус контейнера, тем больше должна быть скорость этикетки.
С учетом вышеизложенного, проблема, на решение которой направлено настоящее изобретение, заключается в создании конвейерной установки для контейнеров, которая устранила бы вышеупомянутые недостатки.
В частности, проблема, на решение которой направлено настоящее изобретение, заключается в создании конвейерной установки для контейнеров, выполненной с возможностью модификации эксплуатационных характеристик за счет сокращения физических модификаций, которые должны быть выполнены на установке или на блоках обработки контейнеров.
Дополнительная проблема, на решение которой направлено настоящее изобретение, заключается в создании конвейерной установки для контейнеров, выполненной с возможностью нанесения этикетки различной длины на контейнеры при их перемещении, независимо от скорости производства и/или кривизны карусели.
Указанные выше проблемы по существу решаются конвейерной установкой для контейнеров в соответствии с прилагаемой формулой изобретения.
Дополнительные признаки и преимущества настоящего изобретения более ясны из подробного описания некоторых предпочтительных, но не исключающих, вариантов осуществления транспортирующей установки для контейнеров, которые показаны на прилагаемых чертежах, где:
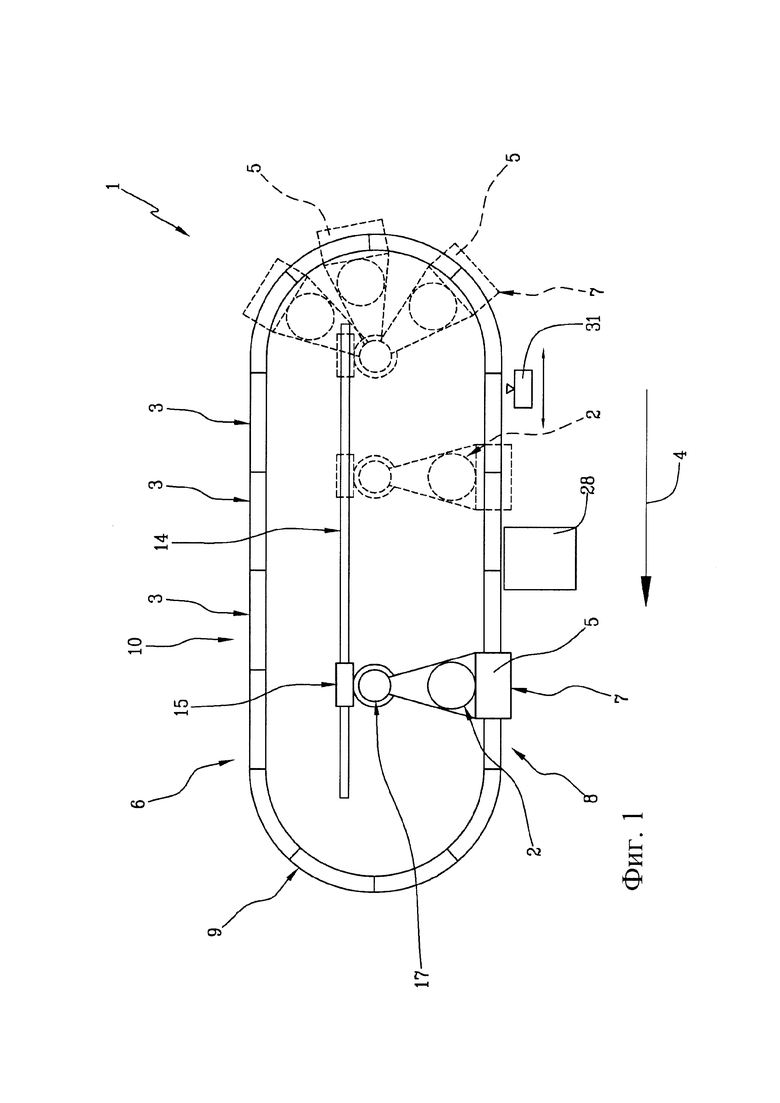
на фиг. 1 на схематическом виде сверху показана транспортирующая установка контейнеров согласно настоящему изобретению;
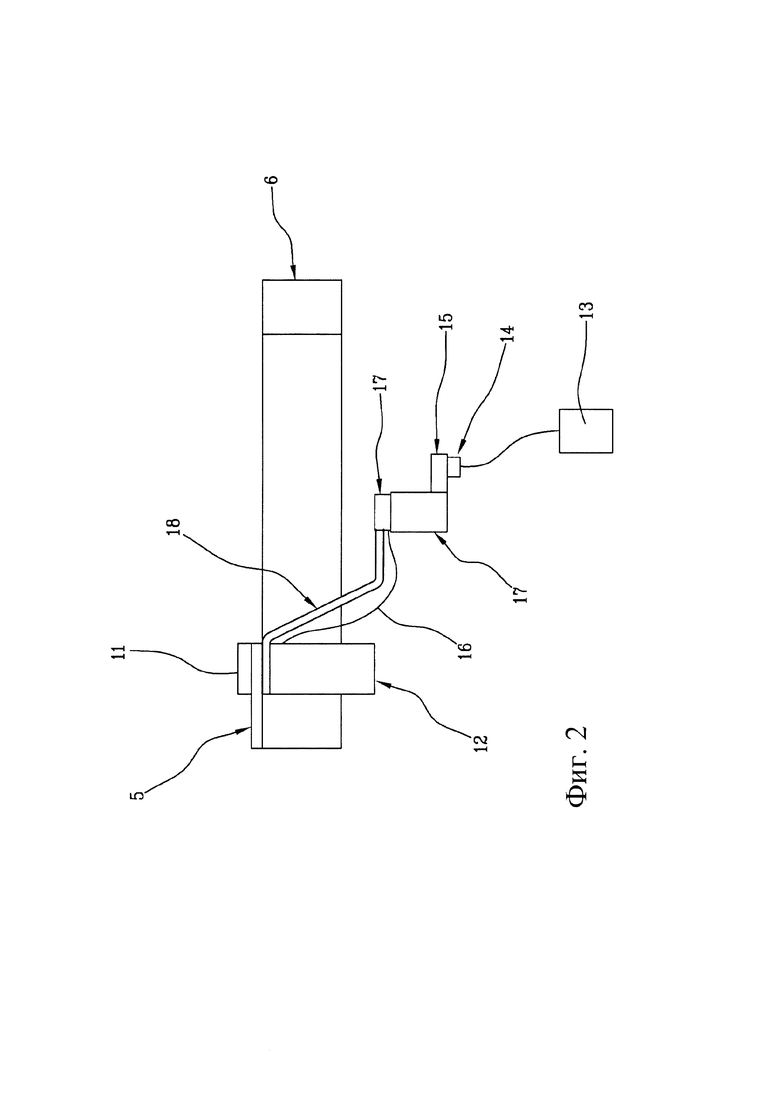
на фиг. 2 на схематическом виде в разрезе показаны детали транспортирующей установки с на фиг. 1;
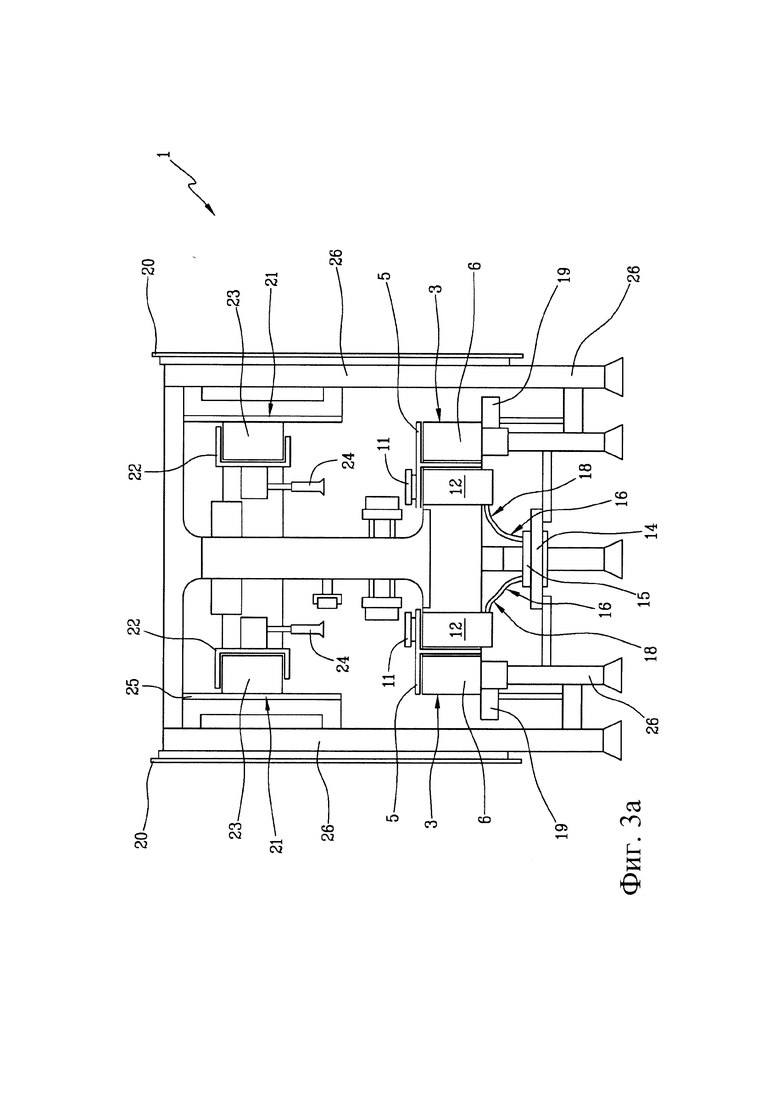
на фиг. 3а на виде сбоку в разрезе показан первый вариант осуществления транспортирующей установки для контейнеров;
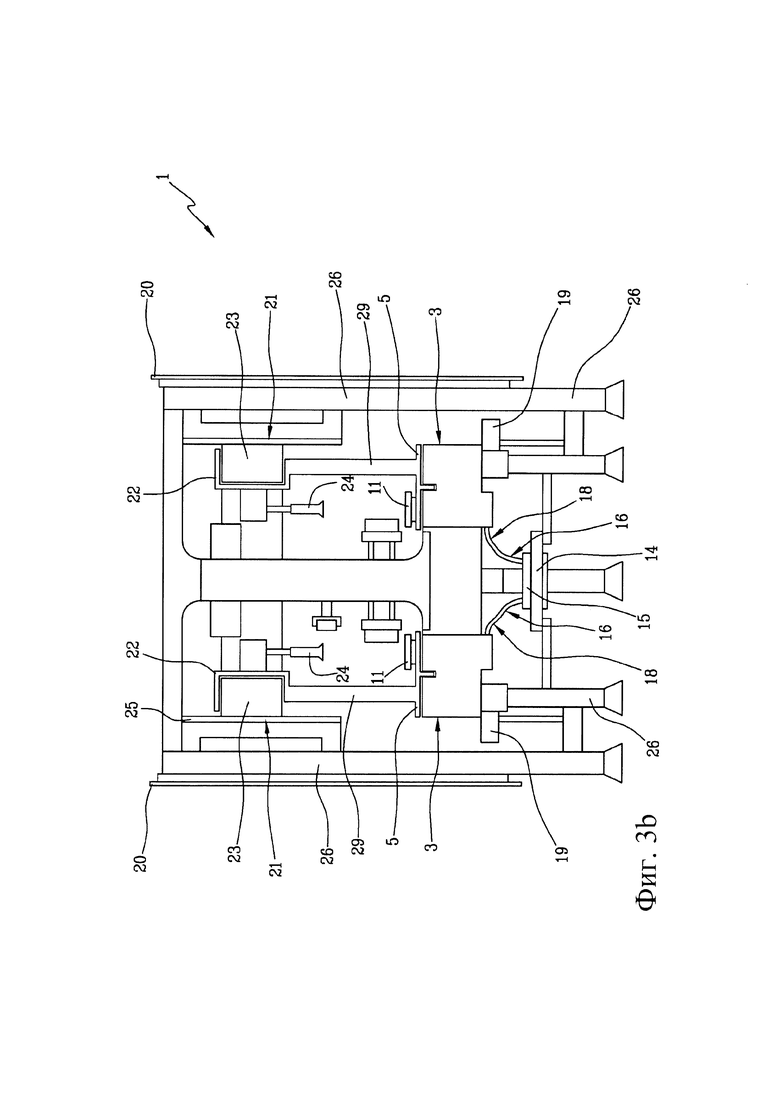
на фиг. 3b на виде сбоку в разрезе показана первая модификация первого варианта осуществления транспортирующей установки для контейнеров;
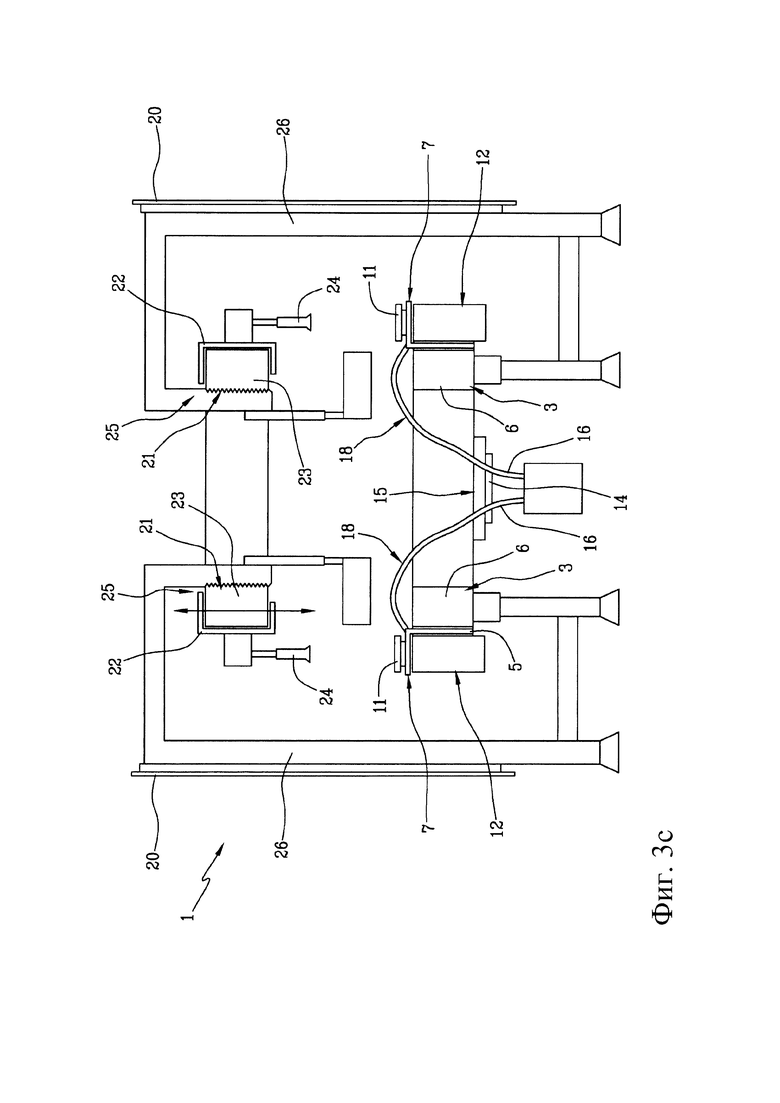
на фиг. 3с на виде сбоку в разрезе показана вторая модификация первого варианта осуществления транспортирующей установки для контейнеров;
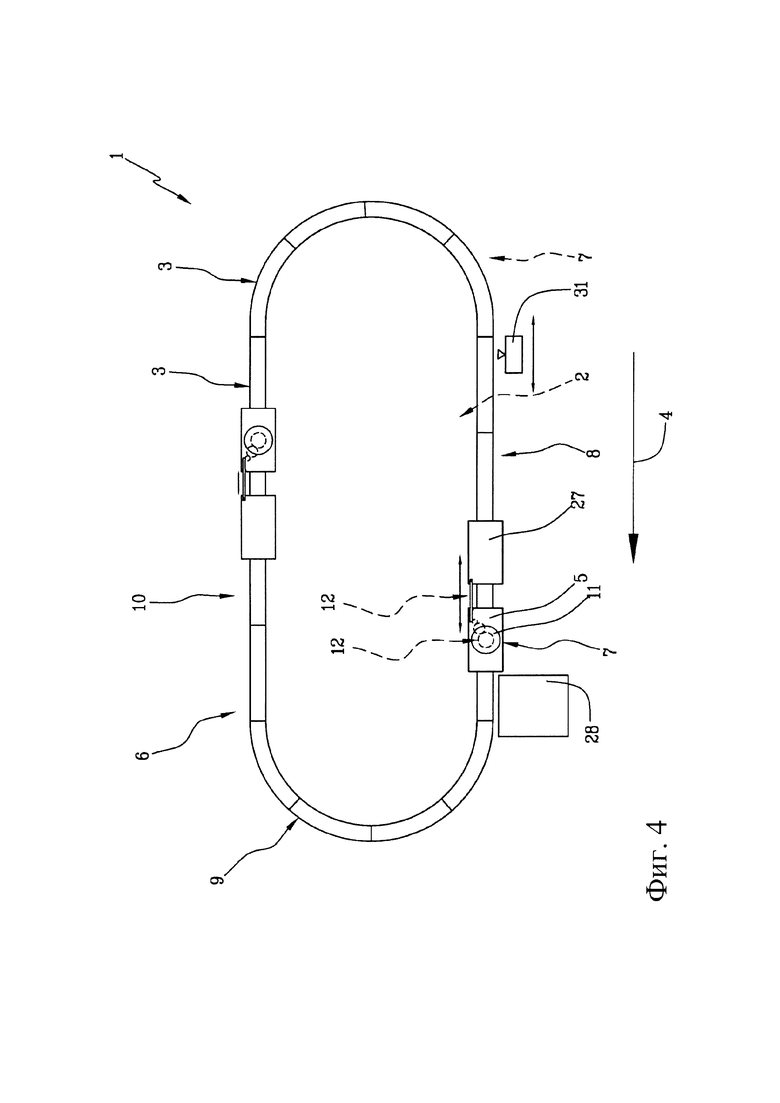
на фиг. 4 на схематическом виде сверху показан второй вариант осуществления транспортирующей установки контейнеров;
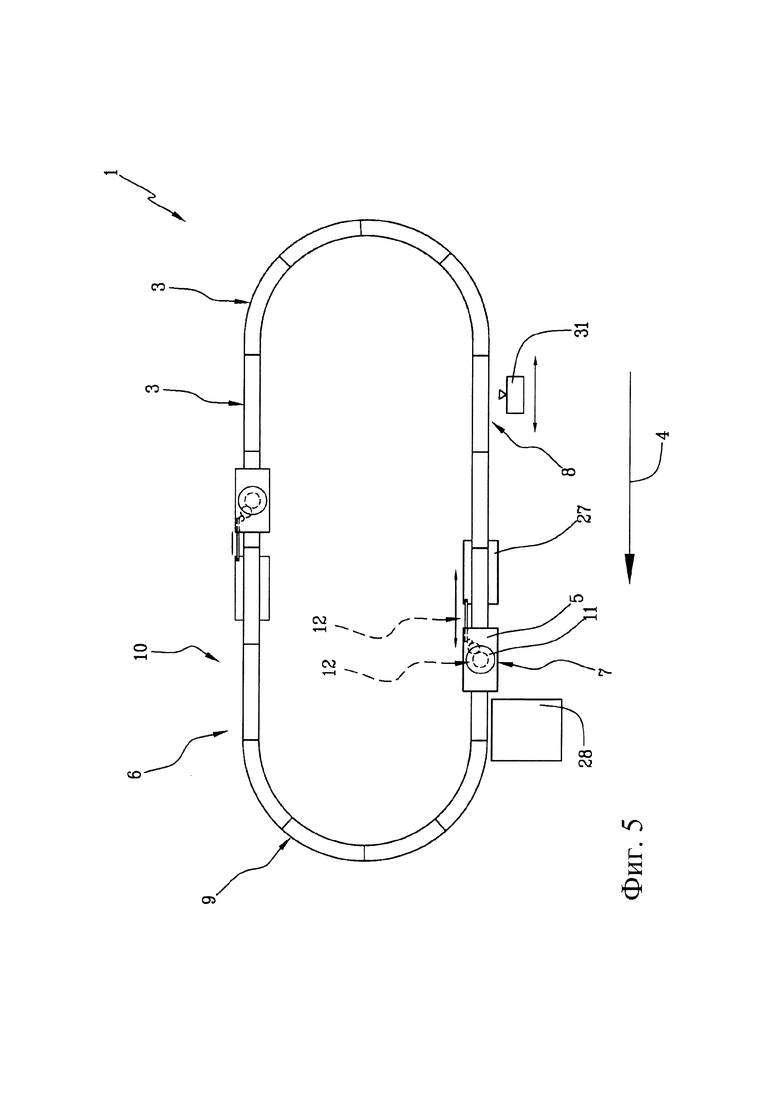
на фиг. 5 на схематическом виде сверху показана модификация второго варианта осуществления транспортирующей установки контейнеров;
на фиг. 6, 7 на схематическом виде сбоку показаны два возможных альтернативных варианта осуществления модификации второго варианта осуществления с фиг. 5; и
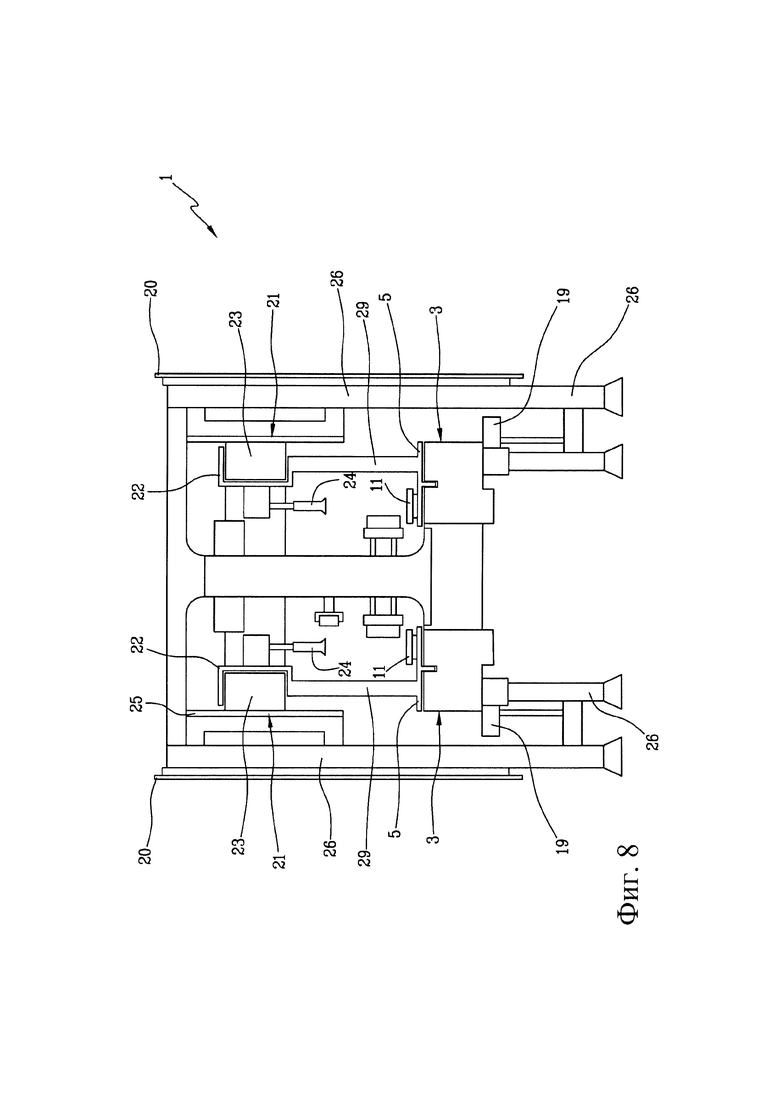
на фиг. 8 на виде сбоку в разрезе показана дополнительная модификация второго варианта осуществления транспортирующей установки для контейнеров.
Как показано на чертежах, ссылочное обозначение 1 соответствует в целом конвейерной установке для контейнеров 2 согласно настоящему изобретению.
Конвейерная установка 1 содержит по меньшей мере один опорный модуль 3, имеющий заданную длину в соответствии с направлением 4 подачи контейнеров 2, и по меньшей мере поддерживающую каретку 5 для контейнеров 2, установленную с возможностью скольжения на упомянутом опорном модуле 3 и подвижную вдоль упомянутого направления 4 подачи для перемещения контейнеров 2. Таким образом, каретка 5 и опорный модуль 3 образуют по меньшей мере часть основного контура подачи.
В частности, опорный модуль 3 и каретка 5 образуют вместе линейный двигатель, в котором статор 6 образован опорным модулем 3, а ротор 7 образован кареткой 5. Линейный двигатель предпочтительно относится к типу, в котором опорный блок содержит множество последовательных электрических обмоток вдоль направления 4 подачи и выполнен с возможностью генерации электромагнитного поля по команде. Каретка 5 содержит один или более постоянных магнитов, расположенных в положении взаимодействия с упомянутыми обмотками. Таким образом, путем подачи питания на электрические обмотки в последовательности вдоль направления 4 подачи создается смещение электромагнитного поля и, таким образом, смещение каретки 5 вследствие взаимодействия с постоянными магнитами.
Этот линейный двигатель дополнительно не описывается, поскольку он является частью известного уровня техники.
В предпочтительном варианте осуществления каретка 5 установлена выше опорного модуля 3 или сбоку относительно опорного модуля 3 или ниже опорного модуля в соответствии с вертикальным опорным направлением.
Как можно видеть на прилагаемых чертежах, установка 1 содержит множество опорных модулей 3, соединенных последовательно для образования единого статора 6, проходящего вдоль направления 4 подачи контейнеров 2. Другими словами, множество опорных модулей 3 выполнены с возможностью конфигурироваться между состоянием взаимного зацепления, в котором опорные модули 3 соединены последовательно для образования единой модульного статора 6, проходящего вдоль направления 4 подачи контейнеров 2, и состоянием разъединения, в котором они взаимно разъединены.
Таким образом, основной контур подачи является модульным, то есть, преимущественно можно увеличить или уменьшить длину или форму статора 6 в зависимости от количества блоков обработки контейнеров 2, применяемых в установке 1.
Предпочтительно имеются прямые опорные модули 3 и изогнутые опорные модули 3. Эти модули расположены вдоль направления 4 подачи так, чтобы образовать заданную траекторию.
Модули предпочтительно расположены последовательно вдоль направления 4 подачи, имеющего по меньшей мере прямую переднюю часть 8, изогнутую часть 9 и прямую возвратную часть 10. Изогнутая часть 9 образована одним или более изогнутыми модулями, расположенными последовательно так, чтобы образовать изогнутую часть 9. Изогнутая часть 9 предпочтительно образует изгиб, составляющий 180°, и может быть образована одним или более изогнутыми модулями, соединенными последовательно. Таким образом, статор 6 имеет прямую поступательную часть, прямую возвратную часть и изогнутую часть, расположенную между этими первыми двумя частями. Кроме того, статор 6 содержит дополнительную изогнутую часть 9, расположенную между возвратной частью и поступательной частью так, чтобы образовать замкнутый контур. На практике этот замкнутый контур имеет по существу форму "0" (ноль).
Другими словами, множество модулей образует замкнутый контур. Следует также отметить, что изогнутая часть 9 имеет постоянный радиус (то есть, после установки она остается неизменной для любой конфигурации прямых модулей). Прямая часть является модульной, то есть, обеспечена возможность последовательно добавлять различные опорные модули 3.
На практике, каждый опорный модуль 3 может проходить вдоль прямого или изогнутого направления.
В альтернативном варианте осуществления направление 4 подачи является круглым или кольцевым, при этом составляющие его опорные модули 3 имеют изогнутое удлинение, предпочтительно с постоянным радиусом. Другими словами, статор 6 имеет круглую форму. Таким образом, преимущественно можно оптимизировать длину периметра траектории относительно вышеупомянутой формы "0".
Поскольку изогнутые модули имеют заданный постоянный радиус, установка 1 преимущественно обеспечивает возможность взаимодействия с звездообразными конвейерами с заданным постоянным радиусом для контейнеров 2 без необходимости в подгонке радиуса карусели, как определено в разделе описания, относящемся к уровню техники (изобретение, конечно, не включает в себя карусель).
Кроме того, установка содержит по меньшей мере блок 28 нанесения отметки распознавания на контейнер 2, расположенный сбоку относительно направления 4 подачи так, чтобы наносить отметку распознавания на контейнер 2. Этот блок 28 нанесения предпочтительно представляет собой блок этикетирования или модуль печати или дополнительно другое устройство, прямо не упомянутое в настоящем документе. Ниже ссылка в основном делается на предпочтительный (но не исключительный) случай блока этикетирования.
Кроме того, согласно предпочтительному варианту осуществления, установка 1 содержит множество кареток 5, выполненных с возможностью перемещаться независимо друг от друга. Другими словами, каретки 5 могут перемещаться независимо друг от друга так, что они могут изменять взаимное расстояние, а также скорость по отношению друг к другу. В частности, опорные модули 3 содержат электрические обмотки, управляемые по отдельности так, чтобы создавать электромагнитные поля в различных зонах блока опорных модулей 3 для обеспечения возможности управления различными каретками 5 независимо друг от друга.
Установка 1 содержит блок 13 управления, функционально соединенный с кареткой 5 так, чтобы управлять ее перемещением вдоль направления подачи. Дополнительно блок 13 управления выполнен с возможностью обнаруживать положение каретки 5 вдоль направления 4 подачи.
Кроме того, установка 1 содержит поддерживающую пластину 11 для контейнеров 2, установленную с возможностью поворота на каретке 5 и выполненную с возможностью поворота вокруг своей оси, перпендикулярной направлению 4 подачи контейнеров 2, таким образом, чтобы поворачивать соответствующий контейнер 2, размещенный в процессе эксплуатации на пластине 11, вокруг самого себя.
Пластина 11 выполнена с возможностью поддержки контейнера 2 за его основание. Альтернативно пластина 11 содержит удерживающие средства, выполненные с возможностью поддержки контейнера 2 за верхнюю часть контейнера 2 (например, посредством манипуляции с горлышком). В последнем случае пластина 11 обращена вниз в соответствии с вертикальным направлением.
Установка 1 содержит средства 12 перемещения пластины 11, причем эти средства функционально соединены с пластиной 11 для обеспечения возможности поворота пластины 11 вокруг собственной оси.
Имеются два предпочтительных варианта осуществления для реализации упомянутых средств 12 перемещения: в первом варианте осуществления (фиг. 1, 2, 3а, 3b, 3с) средства 12 перемещения содержат электрический двигатель, а во втором варианте осуществления (фиг. 4-8) средства 12 перемещения содержат механическую систему перемещения для взаимодействия между двумя каретками.
В отличие от того, что показано, средства 12 перемещения могут содержать механическую систему перемещения для взаимодействия с фиксированной внешней механической частью.
Следует отметить, что блок 13 управления функционально соединен со средствами 12 перемещения пластины 11 для активации поворота пластины 11 или для блокировки пластины 11 в требуемом повернутом угловом положении.
Согласно настоящему изобретению блок 13 управления выполнен с возможностью:
- управления положением каретки 5 вдоль направления 4 подачи;
- активации поворота пластины 11 до того, как каретка 5, на которой установлена пластина 11, достигнет блока 28 нанесения, для приведения погруженного на ней контейнера 2 в требуемое угловое положение;
- последующего нанесения отметки распознавания на контейнер 2 в повернутом угловом положении.
Другими словами, для правильного нанесения отметки распознавания на соответствующей части контейнера 2 важно знать положение контейнера 2 в блоке 28 нанесения.
В частности, имеются два различных режима работы:
1 - блок 13 управления выполнен с возможностью сохранения пластины 11 в повернутом угловом положении в процессе прохождения каретки 5 к блоку 28 нанесения (например, этикетирование горлышка или стандартный адгезив), в этом случае средства 12 перемещения пластины 11 могут содержать останавливающую систему для удержания пластины 11 заблокированной в требуемом угловом положении поворота; или
2 - блок 13 управления выполнен с возможностью поворачивания пластины 11, начиная из повернутого углового положения (известного) в процессе прохождения каретки 5 к блоку 28 нанесения (например, роликовая подача, этикетирование с использованием термоклея или с использованием адгезива при повороте).
Таким образом, предпочтительно можно нанести этикетку, или разгладить ее, на заданной части контейнера 2 после того, как контейнер 2 был повернут и его положение известно.
В любом случае блок управления обнаруживает положение каретки 5 и управляет поворотом пластины до достижения блока 28 этикетирования. Таким образом, контейнер 2 достигает блока 28 этикетирования, будучи уже ориентированным в правильном положении.
Как упомянуто выше, после идентификации правильного положения, нанесение отметки распознавания может происходить на неподвижной бутылке или посредством ее поворота вокруг собственной оси.
В соответствии с первым вариантом осуществления (перемещение с помощью двигателя), средства 12 перемещения содержат электрический двигатель, функционально соединенный с поддерживающей пластиной 11 для ее поворота. Другими словами, двигатель установлен на каретке 5. В предпочтительном случае наличия множества кареток 5 каждая каретка 5 имеет отдельный двигатель.
Двигатель может питаться от батареи, размещенной непосредственно на каретке 5, или может питаться посредством внешней линии подачи питания.
В любом случае блок 13 управления функционально соединен (посредством кабелей или беспроводным образом или иным способом, не описанным явно в данном документе) с электрическим двигателем и выполнен с возможностью управления ее поворотом.
В случае, когда двигатель питается через внешнюю линию подачи питания, блок 13 управления предпочтительно соединен с ним для управления подачей питания на основе электрической энергии.
На фиг. 1, 2 показан пример реализации соединения каждого электрического двигателя соответствующей пластины 11 с источником электрической энергии.
В этом примере установка 1 содержит направляющую 14, отдельную от опорного модуля 3 и расположенную сбоку от него, ползун 15, выполненный с возможностью скольжения на направляющей 14, и кабели 16 подачи электрического питания двигателя, проходящие между поддерживающей кареткой 5 и блоком 17 электрического соединения, установленным на скользящем ползуне 15. Упомянутый блок 17 электрического соединения содержит поворотный электрический соединитель, подсоединенный между кабелями подачи электрического питания двигателя и кабелями электрического питания, соединяемыми с источником электрического питания. Поворотный блок 17 электрического соединения выполнен с возможностью передачи электрической энергии от источника электрического питания двигателя и кабелей 16 подачи электрического питания, соединяемых с источником электрического питания. Дополнительно следует отметить, что между кареткой 5 и блоком 17 электрического соединения имеется жесткий соединительный элемент 18.
Блок 13 управления предпочтительно соединен с электрическим двигателем посредством управляющих электрических кабелей, сгруппированных вместе с кабелями 16 электрического питания и соединенных с блоком 17 электрического соединения. В частности, блок 17 электрического соединения расположен вдоль управляющих электрических кабелей так, чтобы переносить соответствующий сигнал управления от блока 13 управления к электрическому двигателю пластины 11. Другими словами, блок 13 управления генерирует соответствующий сигнал управления, посылаемый в электрический двигатель через управляющие электрические кабели.
Альтернативно, блок 13 управления может быть установлен непосредственно на пластине 11. В этом случае установка 1 содержит множество блоков 13 управления, каждый из которых установлен на соответствующей каретке 5.
В частности, эта система электрического соединения является предпочтительной в случае, когда упомянутая направляющая 14 и упомянутый ползун 15 расположены между упомянутой поступательной частью 8 и упомянутой возвратной частью 10, когда статор 6 (образованный блоком опорных блоков) образует замкнутый контур. Таким образом, кабели 16 подачи питания электрического двигателя фактически следуют за перемещением каретки 5 вдоль замкнутого контура благодаря блоку 17 электрического соединения, в отношении изогнутых частей 9, и благодаря скользящему ползуну 15 для прямых частей 8, 10.
В любом случае следует отметить, что блок 13 управления выполнен с возможностью управления электрическими двигателями каждой пластины 11 независимо друг от друга так, чтобы независимо поворачивать соответствующие пластины 11.
Соответствующий электрический активирующий блок предпочтительно соединен с каждым электрическим двигателем, регулирующим его перемещения. Соединение между активирующим блоком и двигателем реализовано локально на каретке 5, или двигатель может содержать встроенный активирующий блок. Соединение между одним активирующим блоком и другим активирующим блоком выполняется последовательно ("гирляндное соединение"). Таким образом, имеется одна группа кабелей 16, приходящих от поворотного блока электрического соединения и идущих по направлению к первому активирующему блоку, и затем дополнительная группа кабелей от одного активирующего блока к другому.
В соответствии со вторым вариантом осуществления (механическое перемещение), установка 1 содержит вспомогательную каретку 27, функционально связанную с соответствующей поддерживающей кареткой 5 и подвижную по отношению к ней так, чтобы приближаться или удаляться, или сохранять постоянное расстояние от нее. На практике вспомогательная каретка 27 следует за поддерживающей кареткой 5 или упреждает ее.
Средства 12 перемещения расположены между поддерживающей кареткой 5 и вспомогательной кареткой 27 и выполнены с возможностью поворота пластины 11 вокруг собственной оси в случае взаимного приближения или удаления поддерживающей каретки 5 и вспомогательной каретки 27 и блокировки пластины 11 в заданном положении в случае сохранения постоянного расстояния между этими двумя каретками.
Следует отметить, что вспомогательная каретка 27 образует ротор линейного двигателя, который может быть тем же самым линейным двигателем, частью которого является поддерживающая каретка 5, или другим линейным двигателем, отличным от первого и отсоединенным от него.
Другими словами, в первом случае (фиг. 4) вспомогательная каретка 27 установлена на опорном модуле 3, принадлежащем основному контуру подачи поддерживающей каретки 5.
Во втором случае (фиг. 5) вспомогательная каретка 27 установлена по меньшей мере на вспомогательном модуле 30 (предпочтительно на множестве), принадлежащем вспомогательному контуру, отличному от основного контура подачи и имеющему параллельное ему направление подачи. Вспомогательный контур образует линейный двигатель, в котором вспомогательная каретка 27 является ротором.
В последнем случае вспомогательный контур и основной контур подачи соответственно расположены друг над другом, предпочтительно смежным образом (фиг. 6, 7).
В обоих случаях второго варианта осуществления, средства 12 перемещения содержат первую часть, соединенную со вспомогательной кареткой 27, и вторую часть, соединенную с поддерживающей кареткой 5. Упомянутые первая и вторая части находятся во взаимном контакте так, что перемещение первой части относительно второй части создает поворот пластины (11). В частности, первая и вторая части средств 12 перемещения содержат механические зубчатые передачи.
Например, при рассмотрении фиг. 4-7 видно, что механические зубчатые передачи содержат рейку для первой части и по меньшей мере зубчатую шестерню для второй части для поворота пластины 11.
Вспомогательная каретка 27 предпочтительно механически соединена с поддерживающей кареткой 5 в процессе перемещения кареток таким образом, что эти две каретки движутся в паре, по существу с той же скоростью, кроме взаимных перемещений для осуществления поворота пластины, как описано выше.
Установка 1 предпочтительно содержит следящее устройство 31 контейнера для определения ориентации контейнеров 2 до того, как каждый из них достигает блока 28 нанесения.
В этом случае, поскольку нанесение этикеток предпочтительно выполняется вдоль прямой части 8, 10, следящее устройство 31 может быть выполнено для перемещения вперед и назад на другом линейном двигателе так, чтобы оставаться впереди контейнера 2 на части траектории, необходимой для выполнения замеров для последующего поворота контейнера 2. Каретка 5 предпочтительно может быть синхронизована с движением следящего устройства 31, замедляясь или ускоряясь, чтобы не требовалась слишком резкая динамика линейного двигателя следящего устройства 31.
Другими словами, следящее устройство 31 представляет собой внешнее устройство (предпочтительно содержащее детектор, такой как, например, телекамера), которое может следить за бутылкой по меньшей мере на заданной части траектории вверх по потоку от блока 28 нанесения с целью обнаружения углового положения отметки распознавания на ней.
В дополнительном альтернативном варианте осуществления, не показанном на прилагаемых чертежах, средства 12 перемещения относятся к механическому типу и содержат механическую передачу, функционально расположенную между пластиной 11 и опорным модулем 3 и предназначенную для принятия перемещения каретки 5 относительно опорного модуля 3 и для его передачи на пластину 11. Например, механические средства 12 перемещения могут содержать зубчатую рейку, расположенную вдоль статора 6, и шестерню, установленную на каретке 5 и зацепленную с упомянутой рейкой. В дополнительном примере средства 12 перемещения содержат кулачковый элемент, расположенный вдоль статора 6, и скользящий элемент (например, подшипник), установленный на каретке 5 функционально в контакте с кулачковым элементом. В этом случае кулачковый элемент профилирован так, чтобы вызывать поворот пластины 11 в положении заданных профилей.
Как упомянуто выше, установка 1 содержит один или более блоков 28 этикетирования, соединенных сбоку по отношению к опорному модулю 3 так, чтобы выполнять операции на контейнере 2 при перемещении. Блок 28 этикетирования предпочтительно соединен с зацепляющим поддерживающим элементом 19 вдоль прямой части статора 6 так, чтобы упростить операции фиксации и нанесения этикетки на контейнер 2, проходящий на каретке 5.
Соединение блоков 28 этикетирования на прямой части предпочтительно позволяет значительно упростить зацепление блоков 28 этикетирования с периферией установки 1 и позволяет существенно упростить операции выравнивания защитных ограждений 20 (обычно выполненных из плексигласа) при наличии функции взаимозаменяемости блока 28 этикетирования. Выполнение плоских поверхностей из плексигласа фактически намного проще, чем выполнение круглых или профилированных поверхностей.
Для нанесения этикетки на прямой части 8, 10 следует отметить, что на скорость распределения не влияет диаметр бутылки, и, таким образом, нанесение может быть выполнено с меньшей скоростью (более легкое нанесение).
В частности, блок 13 управления выполнен с возможностью поворота пластины 11 на заданный угол перед блоком 28 этикетирования так, чтобы привести контейнер 2 в положение этикетирования по меньшей мере на блоке 28 этикетирования в соответствии с направлением 4 подачи. Другими словами, блок 13 управления управляет электрическим двигателем пластины 11 для поворота контейнера 2 вокруг собственной оси на заданный угол.
Дополнительно блок 13 управления выполнен с возможностью перемещения кареток 5 вдоль направления 4 подачи между подающими, стационарными, реверсивными конфигурациями. Среди подающих конфигураций блок 13 управления выполнен с возможностью ускорения/замедления кареток 5 в зависимости от рабочих условий, которые должны быть выполнены на контейнерах 2.
Другими словами, блок 13 управления выполнен с возможностью модуляции скорости перемещения одиночных кареток 5. Например, блок 13 управления может быть выполнен с возможностью перемещения каретки 5 с меньшей скоростью впереди блока 28 этикетирования с целью нанесения этикетки в условиях "предпочтительной скорости", и затем ускорения в других частях.
Дополнительно, в контексте модуляции скорости кареток 5, блок 13 управления может быть выполнен с возможностью ускорения каретки 5 на первом блоке 28 этикетирования и ее торможения на втором блоке 28 этикетирования в зависимости от длины наносимых этикеток. Другими словами, "шаг установки 1" (расстояние между двумя пластинами 11) изменяется в зависимости от требований. Таким образом, в настоящем изобретении обеспечивается возможность нанесения более длинной этикетки, чем шаг установки 1.
Дополнительно, в варианте осуществления, показанном на фиг. 3, 4, установка 1 содержит, для каждого опорного модуля 3 и для каждой соответствующей каретки 5, соответствующий верхний модуль 21 и верхнюю каретку 22, удаленные в вертикальном направлении от первых; (ниже они называются верхний модуль и нижняя каретка 5).
Верхняя каретка 22 выполнена с возможностью двигаться синхронно с соответствующей нижней кареткой 5. В частности, верхняя каретка 22 содержит удерживающий блок 24, действующий на верхнюю часть контейнеров 2 так, чтобы удерживать контейнер 2 неподвижно в заданном положении.
Удерживающий блок 24 предпочтительно содержит толкатель, который, путем приложения давления на верхней части контейнера 2, поддерживает контейнер 2 направленным к пластине 11 так, чтобы удерживать его неподвижно в заданном положении. Прикладываемое давление позволяет пластине 11, контейнеру 2 и толкателю образовать вместе одно тело. В этом случае контейнер 2 в любом случае переносится нижней кареткой 5 в соответствии с тем, что обычно называют "транспортирование за нижнюю часть".
Другими словами, установка 1 содержит два статора 6, 23, расположенных друг над другом в вертикальном направлении и выровненных относительно друг друга. Другими словами, нижний статор 6 и верхний статор 23 следуют как по направляющим.
Кроме того, количество кареток 5, установленных на верхнем статоре 23, равно количеству кареток 22, установленных на нижнем статоре 6.
В альтернативном варианте количество кареток 5, установленных на верхнем статоре 23, отличается от количества кареток 22, установленных на нижнем статоре 6. Например, количество кареток 5, установленных на нижнем статоре 6, больше количества кареток 22, установленных на верхних модулях 23.
В частности, одна или более кареток 5, установленных на нижнем статоре 6, может содержать пластины 11, имеющие форму, отличную от пластин 11 по меньшей мере части остальных кареток 5. Таким образом, предпочтительно можно загружать контейнеры 2 только на каретках 5 с пластиной 11 требуемой формы в зависимости от рабочих условий. В рабочих условиях установки 1, каретки 5 с пластинами 11 нежелательной формы также перемещаются (под управлением блока 13 управления) вдоль направления 4 подачи, не сталкиваясь с другими каретками 5.
Каждый удерживающий блок 24 предпочтительно содержит толкатель, выполненный с возможностью приложения давления к контейнеру 2 в направлении нижней каретки 5 так, чтобы удерживать контейнер 2 неподвижно в заданном положении.
Для гарантии сохранения контейнера 2 в заданном положении, нижняя каретка 5 и соответствующая верхняя каретка перемещаются вровень, при этом блок 13 управления выполнен с возможностью перемещения кареток 5 с сохранением выравнивания.
На практике, перемещения каждой пары верхних и нижних кареток 5 воспроизводят перемещение бутылки вдоль направления 4 подачи, а поворачивающаяся пластина 11 гарантирует, что бутылка может поворачиваться вокруг ее оси.
Другими словами, каждая пара пластин 11 и толкатель перемещаются на двух параллельных горизонтальных плоскостях, причем их ось поворота одна и та же.
Дополнительно, установка 1 содержит средства 25 изменения расстояния между верхней кареткой 22 и соответствующей нижней кареткой 5 для изменения расстояния в зависимости от высоты обрабатываемых контейнеров 2.
На фиг. 3 показан пример установки 1 с нижним статором 6 и соответствующим верхним статором 23. Выполнение средств 25 изменения расстояния обусловлено тем, что верхний статор 23 выполнен с возможностью скользить в вертикальном направлении на ползунах, что гарантирует возможность выполнения регулировки высоты.
На чертеже также показано, что установка 1 содержит основную раму 26, на которой установлены нижний статор 6 и верхний статор.
На фиг. 3 нижние пластины 11 скользят внутри нижнего статора 6. Поддерживающие элементы для зацепления блоков 28 этикетирования установлены на внешней периферии нижнего статора 6.
На фиг. 4 показан вариант осуществления, в котором нижние пластины 11 и верхние толкатели установлены на внешней стороне статора 6. В этом случае верхний статор 23 поддерживается своей внутренней частью.
Очевидно, что настоящее изобретение, описанное выше на примере установки 1, может быть осуществлено для конвейера, идущего от установки 1 или к ней (то есть, вверх или вниз по потоку), например, подобно звездообразному конвейеру или тому подобного.
На фиг. 3b, 8 показаны реализации модификации, в которых верхняя каретка 22 образует активный линейный двигатель и механически соединена (например, посредством стержня 29) фиксированным образом с нижней кареткой 5, сохраняемой деактивированной так, чтобы оставаться в нерабочем состоянии на опорном модуле 3 так, что верхняя каретка 22 тянет нижнюю каретку 5. Таким образом, нижняя каретка 5 может лишь скользить на основании 3, но не образует линейный двигатель.
На фиг. 3b показан случай, при котором средства 12 перемещения пластины 11 оснащены двигателем, при этом на фиг. 8 показан случай, когда средства 12 перемещения пластины 11 относятся к механическому типу.
Что касается функционирования установки 1, оно непосредственно следует из вышеописанного.
Установка 1 согласно настоящему изобретению обычно используется в более широком контексте конвейерной системы контейнеров 2, в которой каждый контейнер 2 переносится (посредством конвейерной ленты, делительных средств и входной звездочки) на пластине 11 установки 1, транспортирующей контейнер 2 вдоль направления 4 подачи до выходной звездочки, извлекающей контейнер 2 из установки 1.
Каждый контейнер 2 проходит через различные блоки вдоль направления 4 подачи.
Например, первым устройством, с которым встречается контейнер 2, является следящее устройство обнаружения, которое производит замеры профиля контейнера 2 при поиске отметки распознавания, с учетом которой должна быть нанесена первая этикетка.
После этого контейнер 2, за счет перемещения вдоль прямой поступательной части 8, встречает первый блок 28 этикетирования, наносящий первую этикетку, затем следует изгиб, и в прямой возвратной части 10 контейнер 2 встречает, например, вторую и третью группы этикетирования, соответственно наносящие вторую и третью этикетку.
Наконец, каретка 5 подбирает бутылку от выпускной звездочки и ее размещают на выходной конвейерной ленте.
В описанном случае контур подачи образован двумя изогнутыми частями (два изгиба на 180°) и двумя прямыми частями.
Операции, выполняемые на бутылке, такие как ориентация и нанесение этикеток, преимущественно происходят на двух прямых частях контура.
Понятно, что в случае необходимости задействовать новые блоки 28 этикетирования в контуре, достаточно удлинить только прямые части. Например, на каждой стороне может быть добавлена линейная часть для увеличения длины прямой траектории и, таким образом, пространства для добавления новых блоков 28 этикетирования.
Таким образом, настоящее изобретение решает поставленные проблемы.
Во-первых, настоящее изобретение позволяет сократить время проектирования установки 1, поскольку необходимо лишь определить длину прямых частей в зависимости от рабочих потребностей, тогда как остальное (зацепление и характеристики блока 28 этикетирования, радиусы кривизны и прочее) остается таким же и фиксированным.
Во-вторых, пространство, занимаемые установкой 1, меньше, чем в случае установки 1 с поворотной каруселью. Фактически, согласно настоящему изобретению, используется большая часть пространства, которое находилось бы в центральной части карусели известной из уровня техники установки 1, поскольку статор 6 по существу имеет форму "0" (ноль).
Дополнительно, настоящее изобретение позволяет модифицировать эксплуатационные характеристики и характеристики продуктивности установки 1 без физического повторного проектирования. Фактически, настоящее изобретение позволяет легко изменять количество пластин (достаточно добавить каретки 5), "шаг" установки 1 (достаточно соответственно ускорять или тормозить каретки 5) и размеры (достаточно добавить/удалить опорные модули 3).
Наконец, конвейерная система бутылок на пластинах (шнековый конвейер, звездообразный конвейер, и прочие) может оставаться той же самой по сравнению с тем, что использовалось до сих пор, поскольку достаточно согласовать радиус кривизны изогнутой части 9 с радиусом звездочки.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ОБРАБОТКИ ИЛИ ТРАНСПОРТИРОВКИ КОНТЕЙНЕРОВ | 2019 |
|
RU2778765C2 |
| МАШИНА ДЛЯ НАНЕСЕНИЯ ЭТИКЕТОК | 2003 |
|
RU2330796C2 |
| УПРАВЛЯЕМОЕ КОМПЬЮТЕРОМ ЭТИКЕТИРОВОЧНОЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ НАКЛЕЙКИ ЭТИКЕТОК (ВАРИАНТЫ) | 1994 |
|
RU2134651C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОЦЕССА ЭТИКЕТИРОВАНИЯ | 2015 |
|
RU2670409C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ЭТИКЕТОК НА ШИНЫ ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2683737C1 |
| УСТРОЙСТВО ДЛЯ ФИКСАЦИИ БУТЫЛОК | 2024 |
|
RU2837424C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС НАНЕСЕНИЯ ЭТИКЕТОК | 2006 |
|
RU2319648C1 |
| ЭТИКЕТИРОВОЧНАЯ МАШИНА | 2006 |
|
RU2319647C1 |
| СПОСОБ И МАШИНА ДЛЯ ЭТИКЕТИРОВАНИЯ ПОСЛЕДОВАТЕЛЬНОСТИ КОНТЕЙНЕРОВ ПОСРЕДСТВОМ РЯДА НЕЗАВИСИМЫХ ЭТИКЕТИРОВОЧНЫХ СТАНЦИЙ | 2003 |
|
RU2323862C2 |
| Чертежный прибор | 1989 |
|
SU1733273A1 |


Конвейерная установка (1) для контейнеров (2), содержащая по меньшей мере один опорный модуль (3) с заданной длиной в направлении (4) подачи контейнеров (2) и по меньшей мере поддерживающую каретку (5) для контейнеров (2), установленную с возможностью скольжения на упомянутом опорном модуле (3). Опорный модуль (3) и каретка (5) вместе образуют линейный двигатель, в котором статор (6) представляет собой опорный модуль (3), а ротор (7) представляет собой каретку (5). Установка (1) содержит поддерживающую пластину (11) для контейнеров (2), установленную с возможностью поворота на каретке (5), и средства (12) перемещения пластины (11), функционально соединенные с пластиной (11) для поворота ее вокруг собственной оси. 26 з.п. ф-лы, 10 ил.
1. Конвейерная установка (1) для контейнеров (2), содержащая:
по меньшей мере один опорный модуль (3), имеющий заданную длину вдоль направления (4) подачи контейнеров (2) для образования по меньшей мере части основного контура подачи;
по меньшей мере одну поддерживающую каретку (5) для контейнеров (2), установленную с возможностью скольжения на упомянутом опорном модуле (3) и выполненную с возможностью движения вдоль направления (4) подачи для перемещения самих контейнеров (2);
причем упомянутый опорный модуль (3) и каретка (5) вместе образуют линейный двигатель, в котором статор (6) содержит опорный модуль (3), а ротор (7) содержит каретку (5);
поддерживающую пластину (11) для поддержки контейнеров (2), установленную с возможностью поворота на каретке (5) и выполненную с возможностью поворота вокруг своей собственной оси, поперечной направлению (4) подачи контейнеров (2), таким образом, чтобы поворачивать соответствующий контейнер (2), размещенный в процессе эксплуатации на пластине (11), вокруг самого себя относительно каретки (5);
средства (12) перемещения поддерживающей пластины (11), функционально соединенные с пластиной (11) для поворота пластины вокруг самой себя;
по меньшей мере блок (28) нанесения отметки распознавания на контейнер (2), расположенный сбоку по отношению к направлению (4) подачи с возможностью нанесения отметки распознавания на контейнер;
блок (13) управления, функционально соединенный с кареткой (5) для управления ее перемещением вдоль направления подачи и функционально соединенный со средствами (12) перемещения пластины (11) для активации поворота пластины (11) или для блокировки пластины (11) в требуемом повернутом угловом положении;
отличающаяся тем, что упомянутый блок (13) управления выполнен с возможностью:
- управления положением каретки (5) вдоль направления (4) подачи;
- активации поворота пластины (11) до того, как каретка (5), на которой установлена пластина (11), достигает блока (28) нанесения, для приведения погруженного на нее контейнера (2) в требуемое угловое положение при достижении кареткой (5) блока (28) нанесения;
- последующего нанесения отметки распознавания на контейнер (2) в повернутом угловом положении.
2. Установка (1) по п. 1, отличающаяся тем, что блок (13) управления выполнен с возможностью управления угловым положением пластины (11) в процессе прохождения кареткой (5) блока (28) нанесения.
3. Установка (1) по любому из пп. 1, 2, отличающаяся тем, что блок (13) управления выполнен с возможностью сохранения пластины (11) в повернутом угловом положении в процессе прохождения кареткой (5) блока (28) нанесения, или с возможностью поворота пластины (11), начиная от упомянутого повернутого углового положения, в процессе прохождения кареткой (5) блока (28) нанесения.
4. Установка (1) по любому из пп. 1-3, отличающаяся тем, что содержит вспомогательную каретку (27), функционально связанную с соответствующей поддерживающей кареткой (5) и подвижную по отношению к ней с возможностью приближаться или удаляться, или сохранять постоянное расстояние от нее; при этом упомянутые средства (12) перемещения расположены между поддерживающей кареткой (5) и вспомогательной кареткой (27) и выполнены с возможностью поворота пластины (11) вокруг самой себя в случае взаимного приближения или удаления поддерживающей каретки (5) и вспомогательной каретки (27) и блокировки пластины (11) в заданном положении в случае сохранения постоянного расстояния между этими двумя каретками.
5. Установка (1) по п. 4, отличающаяся тем, что вспомогательная каретка (27) образует ротор линейного двигателя.
6. Установка (1) по любому из пп. 4, 5, отличающаяся тем, что вспомогательная каретка (27) установлена на опорном модуле (3), принадлежащем основному контуру подачи поддерживающей каретки (5).
7. Установка (1) по любому из пп. 4, 5, отличающаяся тем, что вспомогательная каретка (27) установлена по меньшей мере на вспомогательном модуле (30), принадлежащем вспомогательному контуру, отличному от основного контура подачи и имеющему параллельное ему направление подачи.
8. Установка (1) по п. 7, отличающаяся тем, что вспомогательный контур и основной контур подачи соответственно расположены друг над другом.
9. Установка (1) по любому из пп. 4-8, отличающаяся тем, что средства (12) перемещения содержат первую часть, соединенную со вспомогательной кареткой (27), и вторую часть, соединенную с поддерживающей кареткой (5); причем упомянутые первая и вторая части находятся во взаимном контакте так, что перемещение первой части относительно второй части вызывает поворот пластины (11).
10. Установка (1) по п. 9, отличающаяся тем, что первая и вторая части средств (12) перемещения содержат механические зубчатые передачи.
11. Установка (1) по любому из пп. 4-10, отличающаяся тем, что вспомогательная каретка (27) выполнена с возможностью механического соединения с поддерживающей кареткой (5) в процессе перемещения кареток.
12. Установка (1) по любому из пп. 1-9, отличающаяся тем, что средства (12) перемещения содержат электрический двигатель, функционально соединенный с поддерживающей пластиной (11) для ее поворота; при этом упомянутая установка (1) содержит блок (13) управления, функционально соединенный с электрическим двигателем и выполненный с возможностью управления ее поворотом.
13. Установка (1) по п. 12, отличающаяся тем, что она содержит: направляющую (14), отдельную от опорного модуля (3) и расположенную сбоку от него;
ползун (15), выполненный с возможностью скольжения на направляющей (14);
кабели подачи электрического питания двигателя, проходящие между поддерживающей кареткой (5) и блоком (17) электрического соединения, установленным на скользящем ползуне (15).
14. Установка (1) по п. 13, отличающаяся тем, что упомянутая направляющая (14) и ползун (15) размещены между поступательной частью основного контура подачи и возвратной частью основного контура подачи; при этом упомянутый блок (17) электрического соединения содержит поворотный электрический соединитель, соединенный между кабелями подачи электрического питания двигателя и кабелями электрического питания, соединяемыми с источником электрического питания.
15. Установка (1) по любому из пп. 1-14, отличающаяся тем, что средства (12) перемещения относятся к механическому типу и содержат механическую передачу, функционально расположенную между пластиной (11) и опорным модулем (3) и выполненную с возможностью принятия перемещения каретки (5) относительно опорного модуля (3) и передачи его пластине (11).
16. Установка (1) по п. 14, отличающаяся тем, что содержит множество кареток (5), выполненных с возможностью перемещения независимо друг от друга.
17. Установка (1) по любому из пп. 1-13 или 15, отличающаяся тем, что содержит множество кареток (5), выполненных с возможностью перемещения независимо друг от друга.
18. Установка (1) по п. 16, отличающаяся тем, что блок (13) управления выполнен с возможностью управления электрическими двигателями каждой пластины (11) независимо друг от друга так, чтобы независимо поворачивать соответствующие пластины (11).
19. Установка (1) по любому из пп. 1-18, отличающаяся тем, что пластина (11) выполнена с возможностью поддержки контейнера (2) посредством его основания или пластина (11) содержит удерживающие средства, выполненные с возможностью поддержки контейнера (2) посредством верхней части контейнера (2).
20. Установка (1) по любому из пп. 1-19, отличающаяся тем, что содержит для каждого опорного модуля (3) и для каждой соответствующей каретки (5) соответствующий верхний модуль (21) и верхнюю каретку (22), удаленные в вертикальном направлении от опорного модуля (3) и нижней каретки (5); причем упомянутая верхняя каретка (22) выполнена с возможностью перемещения синхронно с соответствующей нижней кареткой (5); при этом верхняя каретка (22) содержит удерживающий блок (24), воздействующий на верхнюю часть контейнеров (2) так, чтобы удерживать контейнер (2) неподвижно в заданном положении.
21. Установка (1) по п. 20, отличающаяся тем, что верхняя каретка (22) образует активный линейный двигатель и механически соединена фиксированным образом с нижней кареткой (5), сохраняемой деактивированной так, чтобы оставаться в нерабочем состоянии на опорном модуле (3) так, чтобы верхняя каретка (22) тянула нижнюю каретку (5).
22. Установка (1) по п. 20, отличающаяся тем, что количество кареток (5), установленных на нижних модулях (3), больше количества кареток (22), установленных на верхних модулях (21).
23. Установка (1) по любому из пп. 1-22, отличающаяся тем, что по меньшей мере две каретки (5), установленные на опорных модулях (3), имеют соответствующие пластины (11), имеющие различные размеры для того, чтобы принимать контейнеры (2) разных размеров.
24. Установка (1) по любому из пп. 1-23, отличающаяся тем, что содержит множество опорных модулей (3), конфигурируемых между состоянием взаимного зацепления, в котором опорные модули (3) соединены последовательно для образования одиночного модульного статора (6), проходящего вдоль направления (4) подачи контейнеров (2), и состоянием расцепления, в котором они взаимно расцеплены.
25. Установка (1) по п. 24, отличающаяся тем, что модули являются прямыми и изогнутыми; при этом упомянутые модули размещены вдоль направления (4) подачи, имеющего по меньшей мере одну прямую поступательную часть (8), одну изогнутую часть (9) и одну прямую возвратную часть (10).
26. Установка (1) по любому из пп. 1-25, отличающаяся тем, что опорный блок содержит множество последовательных электрических обмоток вдоль направления (4) подачи и выполнен с возможностью генерации электромагнитного поля по команде; причем упомянутая каретка (5) содержит один или более постоянных магнитов, расположенных в положении взаимодействия с упомянутыми обмотками.
27. Установка (1) по любому из пп. 1-26, отличающаяся тем, что она содержит следящее устройство (31) контейнера для определения ориентации контейнеров (2) до того, как каждый из них достигнет блока (28) нанесения.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| EP 2848382 A1, 18.03.2015 | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Инструментальный захват | 1987 |
|
SU1616798A1 |

