Изобретение относится к стендовым испытаниям систем автоматического управления и контроля газотурбинных двигателей (САУК ГТД).
Известны способ испытаний систем регулирования турбокомпрессорного контура двигателя и стенд для его реализации, содержащий насос и регулятор частоты вращения ротора, причем в качестве силового привода насоса применяются гидроприводы на базе объемных гидронасосов и гидродвигателей и электроприводы с электромагнитными муфтами и тиристорными преобразователями [Черкасов Б.А. Автоматика и регулирование воздушно-реактивных двигателей: Учебник для вузов по специальности «Авиационные двигатели.». - М.: Машиностроение, 1988. - 360 с].
Недостатком указанного способа является высокая стоимость проведения комплексных испытаний САУК и невозможность моделирования отказов.
Недостатком указанного стенда является большая масса и габариты, а также невозможность моделирования отказов.
Наиболее близким техническим решением, выбранным за прототип, является способ полунатурных испытаний САУ ГТД, заключающийся в имитационном моделировании двигателя, датчиков и исполнительных механизмов (ИМ) в реальном масштабе времени.
Операции этого способа осуществляются стендом для испытаний САУ ГТД, содержащим электронную систему управления (ЭСУ), которая посредством имитаторов исполнительных механизмов соединена с машинной моделью ГТД, которая, в свою очередь, связана с имитаторами датчиков, выход из блока имитаторов датчиков соединен с входом электронной системы управления; машинная модель ГТД включает в себя интегратор, сумматор и два усилителя с коэффициентами А и В, причем выходы данных коэффициентов усилителя подключены к входам общего сумматора. Динамика газотурбинного двигателя моделируется путем определения производной  выходного сигнала на каждом шаге моделирования как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, что соответствует системе дифференциальных уравнений в пространстве состояний: =Ax(t)+Bu(t) [Абдулнагимов А.И., Арьков В.Ю. Полунатурный стенд для испытаний систем автоматического управления газотурбинных двигателей // XXXII Гагаринские чтения. Научные труды Международной молодежной научной конференции в 8 томах. - М.: МАТИ, 2006. - Т.2. - С.161-162].
выходного сигнала на каждом шаге моделирования как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, что соответствует системе дифференциальных уравнений в пространстве состояний: =Ax(t)+Bu(t) [Абдулнагимов А.И., Арьков В.Ю. Полунатурный стенд для испытаний систем автоматического управления газотурбинных двигателей // XXXII Гагаринские чтения. Научные труды Международной молодежной научной конференции в 8 томах. - М.: МАТИ, 2006. - Т.2. - С.161-162].
Недостатком указанного способа является невозможность проверки функций контроля отказов из-за того, что моделируется только исправное состояние двигателя, исполнительных механизмов и датчиков и отсутствует модель отказов.
Недостатком указанного стенда является невозможность моделирования отказов.
Задачей, на решение которой направлено заявляемое изобретение, является повышение надежности комплексных испытаний САУК за счет моделирования отказов.
Поставленная задача решается способом полунатурных испытаний систем автоматического управления и контроля газотурбинных двигателей, заключающийся в имитации в реальном масштабе времени параметров двигателя, исполнительных механизмов и датчиков, причем динамику газотурбинного двигателя моделируют путем определения производной выходного сигнала на каждом шаге моделирования как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, отличающийся тем, что выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА1...ΔAn и ΔВ1...ΔBn, выбираемые в зависимости от вида моделируемого отказа, моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения исполнительного механизма или имитации движения исполнительного механизма с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, причем логику переключения ключей для имитации отказов датчиков, исполнительных механизмов и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле.
Поставленная задача решается также с помощью полунатурного стенда для испытаний систем автоматического управления и контроля газотурбинных двигателей, который включает электронную систему управления, первый интегратор, первый сумматор, имитатор датчиков, причем выход первого сумматора соединен со входом первого интегратора, выход первого интегратора соединен со входом имитатора датчиков, в отличии от прототипа дополнительно содержит источники постоянного напряжения А, В, С, ΔA1...ΔAn и ΔB1...ΔBn, шесть реле, n спаренных реле, блок ограничения амплитуды, второй интегратор, второй сумматор, третий сумматор, первый умножитель, второй умножитель, наборное поле, соединенное с управляющей обмоткой реле, k(n+6) тумблеров в наборном поле, k кнопок включения отказов и источник напряжения, причем выход электронной системы управления соединен с третьим контактом первого реле, второй контакт первого реле заземлен, первый контакт первого реле соединен с первым контактом второго реле, выход источника постоянного напряжения С соединен со вторым контактом второго реле, третий контакт второго реле соединен с третьим контактом третьего реле, первый контакт третьего реле соединен со входом второго интегратора, выход второго интегратора соединен с первым контактом четвертого реле, второй контакт четвертого реле заземлен, третий контакт четвертого реле соединен со входом блока ограничения амплитуды, выход блока ограничения амплитуды соединен с входом первого умножителя, выход второго умножителя соединен со вторым входом первого сумматора, выход первого умножителя соединен с первым входом первого сумматора, выход второго сумматора соединен со вторым входом первого умножителя, выход третьего сумматора соединен со вторым входом второго умножителя, выход источника постоянного напряжения В соединен с первым входом второго сумматора, выход источника постоянного напряжения А соединен с первым входом третьего сумматора, третьи контакты с первого по n-е спаренных реле соединены со вторым входом второго сумматора, шестые контакты с первого по n-е спаренных реле соединены со вторым входом третьего сумматора, выходы источников напряжения с ΔА1 по ΔAn соединены с пятыми контактами с первого по n-е спаренных реле, выходы источников напряжения с ΔВ1 по ΔBn соединены со вторыми контактами с первого по n-е спаренных реле, выход первого интегратора соединен с первым входом второго умножителя, выход блока имитатор датчиков соединен с первым контактом пятого реле, второй контакт пятого реле заземлен, третий контакт пятого реле соединен с первым контактом шестого реле, третий контакт шестого реле соединен с входом электронной системы управления, первый контакт кнопки включения отказов соединен с входом источника напряжения, второй контакт кнопки включения отказов соединен с входом наборного поля, первые контакты управляющих обмоток реле с первого по n+6-е соединены с соответствующими выходами наборного поля, вторые контакты управляющей обмотки заземлены.
Сущность изобретения поясняется чертежами.
На фиг.1 представлена схема заявляемого стенда.
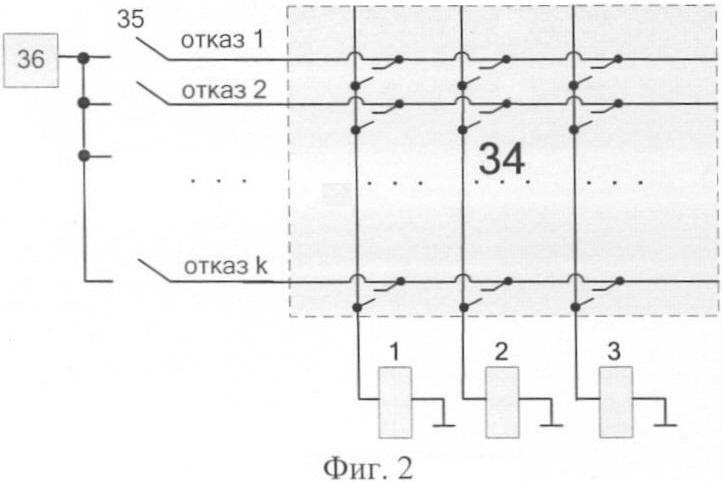
На фиг.2 представлена схема наборного поля стенда.
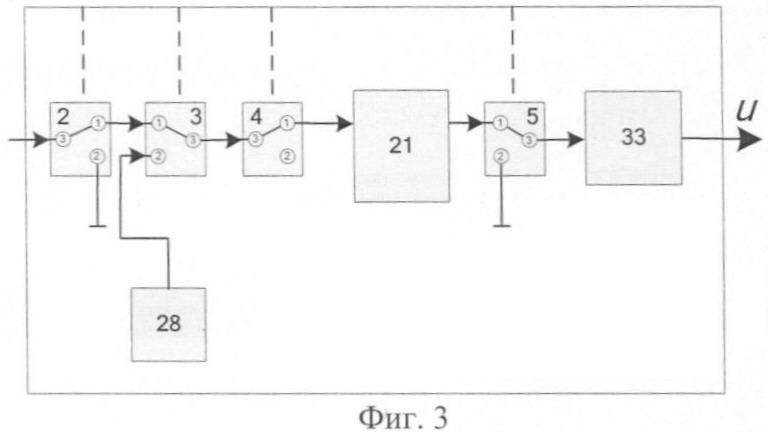
На фиг.3 представлена схема имитаторов исполнительных механизмов.
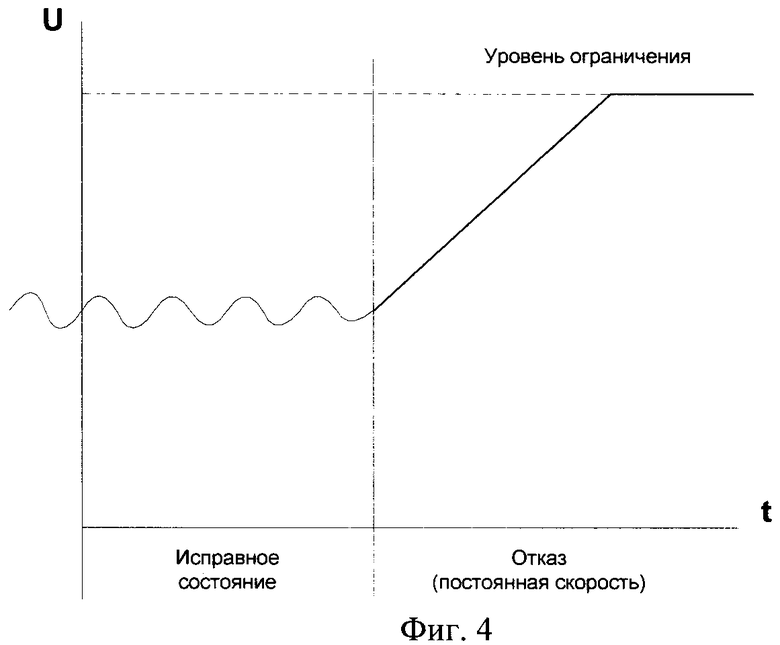
На фиг.4 представлен график положения ИМ u(t) при отказе, приводящем к движению механизма с постоянной скоростью до уровня ограничения.
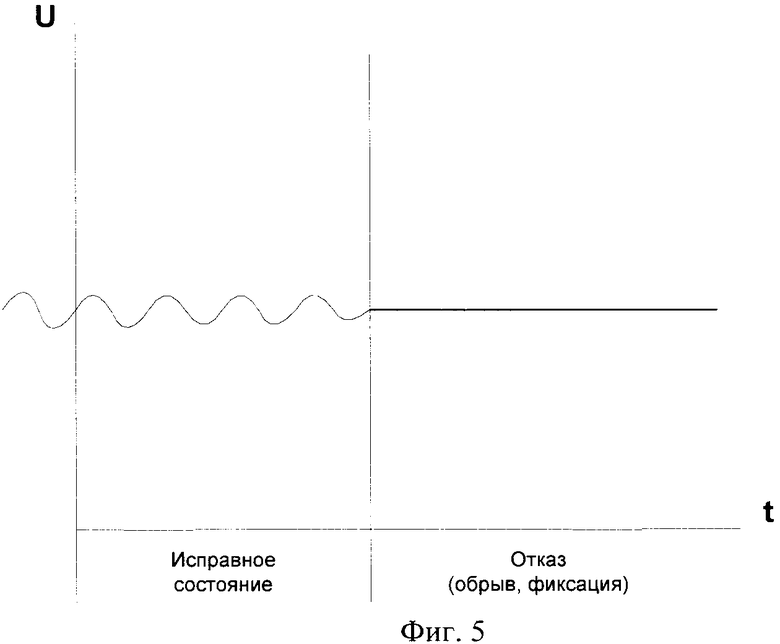
На фиг.5 представлен график положения ИМ u(t) при отказе в виде обрыва электрической цепи, приводящем к фиксации механизма в одном положении.
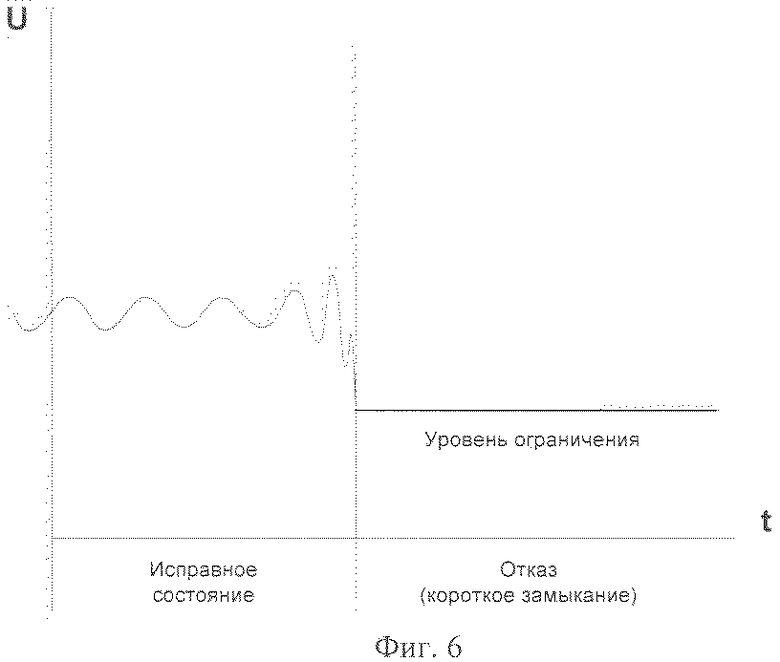
На фиг.6 приведен график положения ИМ u(t) при отказе в виде короткого замыкания, приводящего к фиксации механизма в положении ограничения.
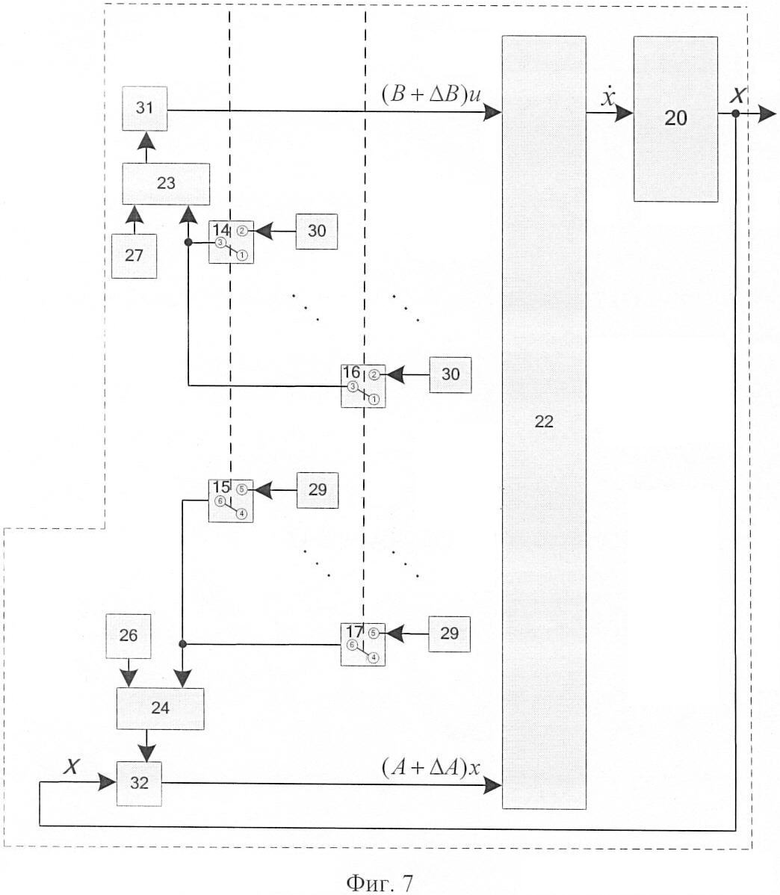
На фиг.7 представлена схема машинной модели ГТД.
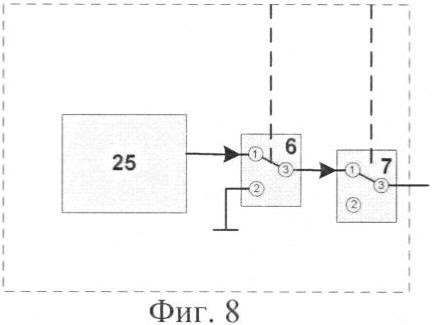
На фиг.8 представлена схема имитаторов датчиков.
Стенд содержит (см. фиг.1) электронную систему управления 1, шесть реле 2, 3, 4, 5, 6, 7 с управляющими обмотками 8, 9, 10, 11, 12, 13, n спаренных реле 14-15, 16-17 с управляющими обмотками 18, 19, интеграторы 20, 21, сумматоры 22, 23, 24, имитатор датчиков 25, источники постоянного напряжения 26, 27, 28, 29, 30, умножители 31, 32, блок ограничения амплитуды 33, наборное поле 34, соединенное с управляющими обмотками реле, k(n+6) тумблеров в наборном поле, k кнопок включения отказов 35, источник напряжения 36, причем выход электронной системы управления 1 соединен с третьим контактом первого реле 2, второй контакт первого реле 2 заземлен, первый контакт первого реле 2 соединен с первым контактом второго реле 3, выход источника постоянного напряжения С 28 соединен со вторым контактом второго реле 3, третий контакт второго реле 3 соединен с третьим контактом третьего реле 4, первый контакт третьего реле 4 соединен со входом второго интегратора 21, выход второго интегратора 21 соединен с первым контактом четвертого реле 5, второй контакт четвертого реле 5 заземлен, третий контакт четвертого реле 5 соединен со входом блока ограничения амплитуды 33, выход блока ограничения амплитуды 33 соединен с входом первого умножителя 31, выход второго умножителя 32 соединен со вторым входом первого сумматора 22, выход первого умножителя 31 соединен с первым входом первого сумматора 22, выход второго сумматора 23 соединен со вторым входом первого умножителя 31, выход третьего сумматора 24 соединен со вторым входом второго умножителя 32, выход источника постоянного напряжения В 27 соединен с первым входом второго сумматора 23, выход источника постоянного напряжения А 26 соединен с первым входом третьего сумматора 24, третьи контакты с первого по n-е спаренных реле 14 и 16 соединены со второго по n+1 входами второго сумматора 23, шестые контакты с первого по n-е спаренных реле 15 и 17 соединены со второго по n+1 входами третьего сумматора 24, выходы источников напряжения с ΔА1...ΔAn 29 соединены с пятыми контактами с первого по n-е спаренных реле 15 и 17, выходы источников напряжения с ΔВ1...ΔBn 30 соединены со вторыми контактами с первого по n-е спаренных реле 14 и 16, выход первого сумматора 22 соединен со входом первого интегратора 20, выход первого интегратора 20 соединен со входом имитатора датчиков 25, выход первого интегратора 20 соединен с первым входом второго умножителя 32, выход имитатора датчиков 25 соединен с первым контактом пятого реле 6, второй контакт пятого реле 6 заземлен, третий контакт пятого реле 6 соединен с первым контактом шестого реле 7, третий контакт шестого реле 7 соединен с входом электронной системы управления 1, первый контакт кнопки включения отказов 35 соединен с входом источника напряжения 36, второй контакт кнопки включения отказов 35 соединен с входом наборного поля 34, первые контакты управляющих обмоток реле с первого по n+6-е соединены с соответствующими выходами наборного поля 34, вторые контакты управляющих обмоток заземлены. Связь между реле и управляющими обмотками показана пунктиром.
Способ реализуют следующим образом.
Динамика газотурбинного двигателя моделируется с помощью системы дифференциальных уравнений в пространстве состояний =Ax{t)+Bu(t).
В качестве входа имитационной модели ГТД u(t) выступают массовый расход топлива и другие управляющие факторы. В качестве переменных состояния x(t) выбирают частоту вращения ротора турбокомпрессора. При этом переменные состояния одновременно являются выходными переменными.
Напряжение питания Uп 36, поступающее с k кнопок включения отказов 35 через k(n+6) тумблеров в наборном поле 34 (см. фиг.2) на управляющие обмотки n+6 реле, вызывает соответствующие переключения в стенде, что позволяет имитировать в стенде три отказа (состояния) датчиков и исполнительных механизмов: обрыв провода, короткое замыкание и исправное состояние, а также различные отказы двигателя. Для одновременной имитации нескольких отказов (например, обрыв цепи датчика и отказ в двигателе) инженер должен нажать соответствующие кнопки включения отказов.
Имитация работы и отказов ИМ (см. фиг.3) имитируется с помощью реле 2, 3, 4, 5, второго интегратора 20, источника постоянного напряжения С 28 и блока ограничения амплитуды 33, причем реле 4 имитирует обрыв провода, а реле 2 и 5 - короткое замыкание. Кроме этого, рассматриваем возможность фиксации исполнительного органа в каком-либо состоянии, когда механизм перестает подчиняться управляющим сигналам регулятора.
Также имитируется движение исполнительного механизма в одну сторону с постоянной скоростью до ограничения. Для этого второе реле 3 замыкает второй и третий контакты, а остальные реле находятся в обычном состоянии (замкнуты первый и третий контакты). В этом случае постоянное напряжение с источника С 28 поступает на вход второго интегратора 21. На выходе второго интегратора 21 вырабатывается сигнал, изменяющийся с постоянной скоростью. Этот сигнал ограничивается по амплитуде в блоке ограничения амплитуды 33. Форма полученного сигнала u(t), имитирующего выход ИМ, представлена на фиг.4.
Обрыв входной электрической цепи ИМ имитируется путем замыкания второго и третьего контактов реле 4, при этом остальные реле находятся в обычном состоянии (замкнуты первый и третий контакты). В этом случае на входе второго интегратора 21 сигнал отсутствует и его выходной сигнал остается постоянным (см. фиг.5). Здесь имитируется фиксация (застревание) ИМ в одном положении.
Короткое замыкание входной электрической цепи ИМ имитируется путем замыкания вторых и третьих контактов реле 2 и 5, при этом остальные реле находятся в обычном состоянии (замкнуты первый и третий контакты). В этом случае выходная электрическая цепь электронной системы управления (ЭСУ) 1 замыкается на "землю". Кроме того, выходной сигнал из ИМ обнуляется (см. фиг.6). При необходимости, моделирование короткого замыкания может включать в себя замыкание выходной цепи ЭСУ (первое реле 2 замыкает второй и третий контакты) и движение ИМ с постоянной скоростью до ограничителя (четвертое реле 5 замыкает второй и третий контакты). Для этого замыкаются и переключаются соответствующие переключатели в наборном поле 34. Таким образом использование наборного поля позволяет без дополнительных затрат исследовать на испытательном стенде различные варианты развития отказов.
Отказы в двигателе (см. фиг.7) имитируются с помощью первого интегратора 20, сумматоров 22, 23, 24, источников постоянного напряжения А, В, ΔА1...ΔAn и ΔВ1...ΔBn, умножителей 31, 32 и n спаренных реле.
Отказы двигателя моделируются путем изменения коэффициентов динамической модели. Модель внезапных отказов - это скачкообразное изменение коэффициента А на величины ΔА, В на ΔB. Величина этих скачков определяется заранее по термодинамической модели двигателя для каждого отказа. Например, в случае обрыва лопатки компрессора снижается КПД компрессора, что выражается в соответствующем изменении коэффициентов ΔА и ΔВ в динамической модели. Другие отказы двигателя, например прогорание камеры сгорания или разрушение лопатки турбины, приводят к другим изменениям коэффициентов ΔА и ΔВ.
Таким образом выбирается n типовых отказов двигателя для имитации на испытательном стенде, с помощью соответствующих добавок к коэффициентам ΔА1...ΔAn и ΔВ1...ΔBn.
При имитации выбранного i-го отказа двигателя инженер нажимает соответствующую i-ю кнопку включения отказа. В этом случае напряжение питания Un 36 через наборное поле поступает на соответствующие спаренные реле с номерами с первого по n-е. Это приводит к замыканию первого и третьего контактов реле 14, 16 и четвертого и шестого контактов реле 15, 17, причем сигналы с источников постоянного напряжения ΔАi 29 через соответствующие реле поступают на второй сумматор 23, a ΔBi 30 - на третий сумматор 24. На выходе второго сумматора 23 формируется постоянное напряжение величиной В+ΔВi, которое умножается на выходной сигнал ИМ u(t) в первом умножителе 31. На выходе третьего сумматора 24 формируется постоянное напряжение величиной А+ΔАi, которое умножается на выходной сигнал модели двигателя x(t) во втором умножителе 32. Полученные после умножения сигналы (А+ΔАi)х и (В+ΔВi)u складываются в первом сумматоре 22, полученный сигнал интегрируется в первом интеграторе 20. Таким образом, динамика газотурбинного двигателя в случае имитации i-го отказа двигателя моделируется с помощью дифференциального уравнения
=(А+ΔiA)x(t)+(B+ΔiB)u(t), т.е.

Отказы в блоке имитаторов датчиков (см. фиг.8) имитируются с помощью реле 6 и 7 и блока имитаторов датчиков 25.
Обрыв выходного сигнала из имитатора датчиков имитируется путем замыкания второго и третьего контактов шестого реле 7, при этом остальные реле находятся в обычном состоянии (замкнуты первый и третий контакты). В этом случае на входе ЭСУ 1 сигнал отсутствует и его выходной сигнал остается постоянным (см. фиг.5).
Короткое замыкание выходного сигнала из имитатора датчиков имитируется путем замыкания второго и третьего контактов пятого реле 6, при этом остальные реле находятся в обычном состоянии (замкнуты первый и третий контакты). В этом случае выходной сигнал из шестого реле 7 на ЭСУ 1 обнуляется (см. фиг.6).
Использование предлагаемого способа для испытаний САУК ГТД и стенда для его реализации обеспечивает по сравнению с прототипом следующие преимущества:
а) позволяет моделировать отказы различных элементов, датчиков, исполнительных механизмов, двигателя при полунатурных испытаниях САУК ГТД;
б) снижается объем натурных испытаний электронных регуляторов на двигателе и самолете.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И КОНТРОЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2340883C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2418964C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЦИФРОВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, КОНТРОЛЯ И ДИАГНОСТИКИ МНОГОДВИГАТЕЛЬНЫМИ СИЛОВЫМИ УСТАНОВКАМИ | 2013 |
|
RU2554667C2 |
| СПОСОБ ИСПЫТАНИЯ ЭЛЕКТРОННЫХ РЕГУЛЯТОРОВ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2098790C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ИНФОРМАЦИИ ИЗМЕРИТЕЛЬНОГО КАНАЛА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2445483C1 |
| Устройство измерения давления с модулями преобразователей давления и способ работы устройства | 2018 |
|
RU2693742C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2332580C1 |
| Стенд для испытания гидравлического регулятора оборотов газотурбинного двигателя | 1980 |
|
SU979942A1 |
| ПОМЕХОУСТОЙЧИВЫЙ САМОНАСТРАИВАЮЩИЙСЯ ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2601712C2 |
| ИЗМЕРИТЕЛЬ ТЕМПЕРАТУРЫ ГАЗА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2617221C1 |
Использование: изобретение относится к стендовым испытаниям систем автоматического управления и контроля газотурбинных двигателей (САУК ГТД). Технический результат: повышение надежности комплексных испытаний САУК ГТД за счет моделирования отказов. Сущность изобретения: в способе проведения комплексных испытаний САУК ГТД в реальном масштабе времени параметров газотурбинного двигателя, исполнительных механизмов и датчиков, причем динамику газотурбинного двигателя моделируют путем определения производной  выходного сигнала на каждом шаге моделирования как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА1...ΔAn и ΔВ1...ΔBn, выбираемые в зависимости от вида моделируемого отказа, моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения исполнительного механизма или имитации движения исполнительного механизма с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, причем логику переключения ключей для имитации отказов датчиков, исполнительных механизмов и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле. Способ реализуется полунатурным стендом для испытаний САУК ГТД. 2 н.п. ф-лы, 8 ил.
выходного сигнала на каждом шаге моделирования как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА1...ΔAn и ΔВ1...ΔBn, выбираемые в зависимости от вида моделируемого отказа, моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения исполнительного механизма или имитации движения исполнительного механизма с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, причем логику переключения ключей для имитации отказов датчиков, исполнительных механизмов и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле. Способ реализуется полунатурным стендом для испытаний САУК ГТД. 2 н.п. ф-лы, 8 ил.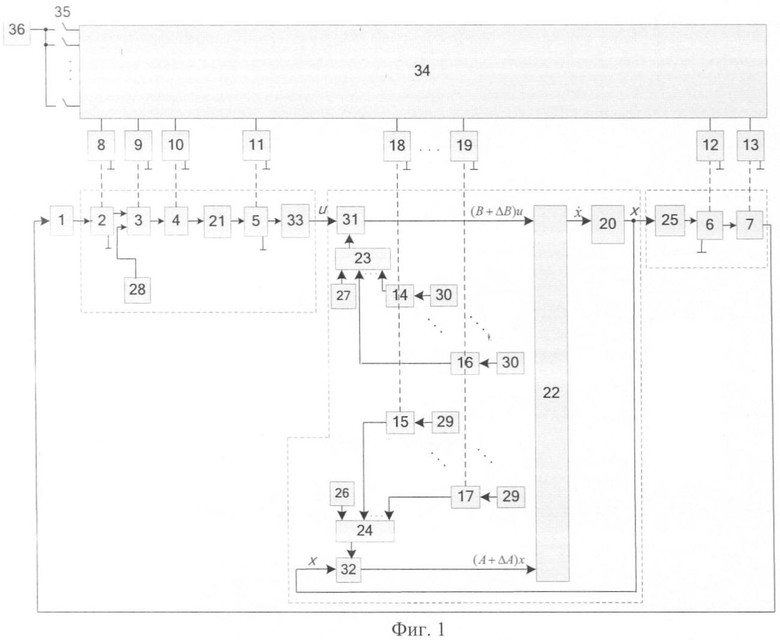
 выходного сигнала на каждом шаге моделирования как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, отличающийся тем, что выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА1...ΔAn и ΔB1...ΔBn, выбираемые в зависимости от вида моделируемого отказа, моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения исполнительного механизма или имитации движения исполнительного механизма с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, причем логику переключения ключей для имитации отказов датчиков, исполнительных механизмов и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле.
выходного сигнала на каждом шаге моделирования как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, отличающийся тем, что выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА1...ΔAn и ΔB1...ΔBn, выбираемые в зависимости от вида моделируемого отказа, моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения исполнительного механизма или имитации движения исполнительного механизма с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, причем логику переключения ключей для имитации отказов датчиков, исполнительных механизмов и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле.
| АБДУЛНАГИМОВ А.И | |||
| и др | |||
| Полунатурный стенд для испытаний систем автоматического управления газотурбинных двигателей | |||
| XXXII Гагаринские чтения | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| - М.: МАТИ, 10.03.2006, том 2, с.161-162 | |||
| СПОСОБ ИСПЫТАНИЯ ЭЛЕКТРОННЫХ РЕГУЛЯТОРОВ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2098790C1 |
| RU 2063622 C1, 10.07.1996 | |||
| Машина для намотки кишок | 1929 |
|
SU18107A1 |
| СПОСОБ ПОЛУНАТУРНОГО ИССЛЕДОВАНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ | 1992 |
|
RU2039963C1 |
| US 6262550 B1, 17.07.2001 | |||
| US 5396793 A, 14.03.1995. | |||

