Изобретение относится к стендовым испытаниям систем автоматического управления и контроля газотурбинных двигателей (САУК ГТД).
Известен способ испытаний систем регулирования турбокомпрессорного контура двигателя, заключающийся в моделировании контура регулирования температуры газа, причем электрический регулятор температуры подключается к модели двигателя без преобразователя, регулятор температуры воздействует на створки реактивного сопла, гидроцилиндры сопла имитируются одним гидроцилиндром с механической обратной связью с агрегатом управления соплом, дополнительный гидроцилиндр дает возможность имитировать нагрузку от давления газов на створки сопла, преобразование хода гидроцилиндра в напряжение осуществляется с помощью потенциометра [Черкасов Б.А. Автоматика и регулирование воздушно-реактивных двигателей: Учебник для вузов по специальности «Авиационные двигатели.». - М., Машиностроение, 1988. - 360 с.].
Известен стенд для испытания топливо-регулирующей аппаратуры, содержащий насос и регулятор частоты вращения ротора двигателя (или насос-регулятор), причем в качестве силового привода применяются гидро- и электроприводы [Черкасов Б.А. Автоматика и регулирование воздушно-реактивных двигателей: Учебник для вузов по специальности «Авиационные двигатели.». - М., Машиностроение, 1988. - 360 с.].
Недостатком указанного способа является высокая стоимость проведения комплексных испытаний САУК и невозможность моделирования отказов.
Недостатком указанного стенда является большая масса и габариты, а также невозможность моделирования отказов.
Наиболее близким техническим решением, выбранным за прототип, является способ полунатурных испытаний САУК ГТД, заключающийся в имитации в реальном масштабе времени параметров двигателя, исполнительных механизмов и датчиков. Динамика ГТД моделируется путем определения производной  выходного сигнала как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной. Выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА(j) и ΔB(j), выбираемые в зависимости от вида моделируемого отказа (где j=1...n - номер отказа):
выходного сигнала как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной. Выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА(j) и ΔB(j), выбираемые в зависимости от вида моделируемого отказа (где j=1...n - номер отказа):

Отказы исполнительных механизмов (ИМ) моделируются путем обрыва или замыкания входной электрической цепи имитатора ИМ и фиксации положения или имитации движения с постоянной скоростью до положения ограничения. Отказы датчиков моделируются путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, причем логику переключения ключей для имитации отказов датчиков, ИМ и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле.
Операции этого способа осуществляются стендом для испытаний САУК ГТД, содержащим электронную систему управления (ЭСУ), имитатор исполнительных механизмов, усилитель с коэффициентами усиления A+ΔA(j) (где j=5...n+4), усилитель с коэффициентами усиления B+ΔB(j) (где j=5...n+4), сумматор, интегратор, имитатор датчиков, источник питания, k кнопок включения отказов, наборное поле, представляющее собой массив k(n+6) тумблеров Тij (i=1...k, j=1...n+6). Напряжение питания Uп, поступающее с k кнопок включения отказов через k(n+6) тумблеров в наборном поле на управляющие обмотки n+6 реле, вызывает соответствующие переключения в стенде, что позволяет имитировать в стенде три состояния датчиков и исполнительных механизмов: обрыв провода, короткое замыкание и исправное состояние, а также различные отказы двигателя. Для одновременной имитации нескольких отказов (например, обрыв цепи датчика и отказ в двигателе) инженер должен нажать соответствующие кнопки включения отказов. 1-й, 2-й, 3-й, 4-й управляющие выходы наборного поля соединены с соответствующими 1-м, 2-м, 3-м, 4-м управляющими входами имитатора исполнительных механизмов на включение короткого замыкания, обрыва, фиксации и движения исполнительных механизмов с постоянной скоростью. Управляющие выходы с 5-го по (n+4)-й наборного поля соединены с управляющими входами усилителей A+ΔA(j) и B+ΔB(j) на включение j-го отказа двигателя (где j=1...n), (n+5)-й и (n+6)-й выходы наборного поля соединены с управляющими входами имитатора датчиков на включение короткого замыкания и обрыва датчиков. [Абдулнагимов А.И., Арьков В.Ю. Способ полунатурных испытаний систем автоматического управления и контроля газотурбинных двигателей и стенд для его реализации // XXXIII Гагаринские чтения. Научные труды Международной молодежной научной конференции в 8 томах - М.: МАТИ, 2007. - Т.4 - с.5-7.].
Недостатком указанного способа и стенда является невозможность автоматического включения отказов двигателя, датчиков и исполнительных механизмов в заданной последовательности.
Задачей, на решение которой направлено заявляемое изобретение, является повышение надежности комплексных испытаний САУК за счет моделирования «следственных» отказов, т.е. автоматического включения отказов двигателя, датчиков и исполнительных механизмов в заданной последовательности.
Поставленная задача решается способом полунатурных испытаний систем автоматического управления и контроля газотурбинных двигателей, заключающимся в имитации в реальном масштабе времени параметров двигателя, исполнительных механизмов и датчиков, по которому динамику газотурбинного двигателя моделируют путем определения производной выходного сигнала как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔА(j) и ΔB(j), выбираемые в зависимости от вида моделируемого отказа (где j=1...n - номер отказа), моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения или имитации движения с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, логику переключения ключей для имитации отказов датчиков, ИМ и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле, в отличие от прототипа в заданные моменты времени формируют управляющие сигналы по заранее составленному расписанию на последовательное включение нескольких отказов, путем подачи на вход интегратора постоянного положительного напряжения питания, и полученный в результате интегрирования линейно возрастающий сигнал подают с помощью k переключателей Si (где i=1...k) на первые входы k компараторов Ki (где i=1...k), полученный постоянный уровень напряжения с i-го потенциометра Ri (где i=1...k) подают на 2-ой вход i-го компаратора Ki (где i=1...k), в определенный момент времени, когда линейно нарастающее напряжение превысит установленный с помощью i-го потенциометра Ri (где i=1...k) уровень, выходной сигнал i-го компаратора Ki (где i=1...k) в виде напряжения питания поступает на вход наборного поля, причем для выбора момента включения i-го отказа заранее настраивают положение среднего контакта i-го потенциометра Ri (где i=1...k) и соответствующее выходное напряжение i-го потенциометра Ri (где i=1...k), которые пропорциональны моменту времени от начала моделирования, когда должен включиться тот или иной i-й отказ.
Поставленная задача решается также с помощью полунатурного стенда для испытаний систем автоматического управления и контроля газотурбинных двигателей, включающего электронную систему управления, имитатор исполнительных механизмов, усилитель с коэффициентами усиления A+ΔA(j) (где j=5...n+4), усилитель с коэффициентами усиления B+ΔВ(j) (где j=5...n+4), первый сумматор, первый интегратор, имитатор датчиков, источник питания, наборное поле, представляющее собой массив k(n+6) тумблеров Tij (где i=1...k, j=1...n+6), причем i-й вход наборного поля (где i=1...k) соединен с первыми контактами тумблеров Tij (где j=1...n+6), j-й выход наборного поля (где j=1...n+6) соединен со вторыми контактами тумблеров Tij (где i=1...k), 1-й, 2-й, 3-й, 4-й управляющие выходы наборного поля соединены с соответствующими 1-м, 2-м, 3-м, 4-м управляющими входами имитатора исполнительных механизмов на включение короткого замыкания, обрыва, фиксации и движения исполнительных механизмов с постоянной скоростью, управляющие выходы с 5-го по (n+4)-й наборного поля соединены с управляющими входами усилителей A+ΔA(j) и B+ΔB(j) на включение j-го отказа двигателя (где j=1...n), (n+5)-й и (n+6)-й выходы наборного поля соединены с управляющими входами имитатора датчиков на включение короткого замыкания и обрыва датчиков, выход электронной системы управления соединен с входом имитатора исполнительных механизмов, выход имитатора исполнительных механизмов соединен с входом усилителя с коэффициентами усиления B+ΔB(j), выход которого соединен с первым входом первого сумматора, выход первого сумматора соединен с входом первого интегратора, выход первого интегратора соединен со входом усилителя с коэффициентами усиления A+ΔA(j) и с входом имитатора датчиков, выход усилителя с коэффициентами усиления A+ΔA(j) соединен со вторым входом первого сумматора, выход имитатора датчиков соединен с входом электронной системы управления, в отличие от прототипа дополнительно содержит кнопку запуска моделирования Sзап., второй интегратор, k кнопок включения отказов Si (где i=1...k), k компараторов Ki (где i=1...k), k потенциометров Ri (где i=1...k), причем первый контакт кнопки запуска моделирования соединен с положительной шиной источника питания, отрицательная шина источника питания заземлена, третий контакт кнопки запуска моделирования соединен с входом второго интегратора, второй контакт кнопки запуска моделирования заземлен, выход второго интегратора соединен с первыми контактами k кнопок включения отказов Si (где i=1...k), третий контакт i-й кнопки включения отказов Si (где i=1...k) соединен с первым входом соответствующего компаратора Ki (где i=1...k), второй контакт кнопки включения отказов Si (где i=1...k) заземлен, первые контакты k потенциометров Ri (где i=1...k) соединены с положительной шиной источника питания, вторые контакты k потенциометров Ri (где i=1...k) заземлены, выход i-го потенциометра Ri (где i=1...k) соединен со вторым входом соответствующего i-го компаратора Ki (где i=1...k), выход i-го компаратора Ki (где i=1...k) соединен с i-м входом наборного поля.
Сущность изобретения поясняется чертежами.
На фиг.1 представлена схема заявляемого стенда.
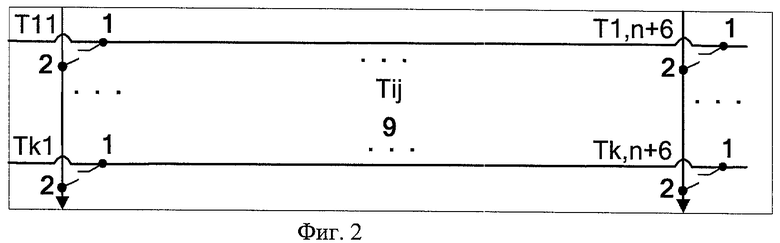
На фиг.2 представлена схема наборного поля стенда.
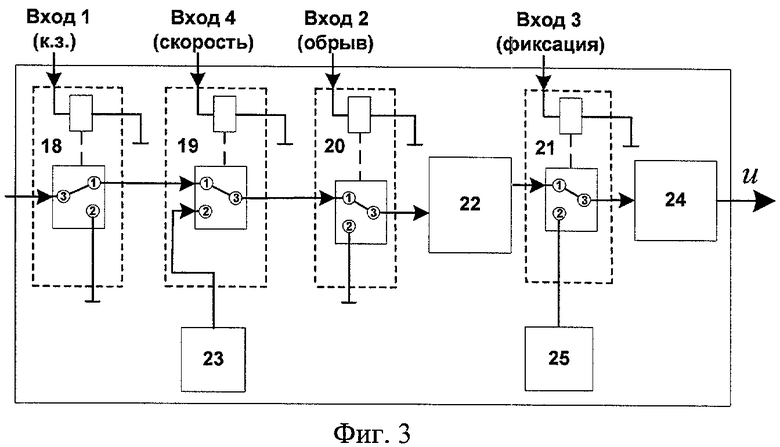
На фиг.3 представлена схема имитаторов исполнительных механизмов.
На фиг.4 приведен график положения ИМ u(t) при отказе в виде короткого замыкания, приводящего к фиксации механизма в положении ограничения.
На фиг.5 представлен график положения ИМ u(t) при отказе в виде обрыва электрической цепи, приводящем к фиксации механизма в одном положении.
На фиг.6 представлен график положения ИМ u(t) при отказе, приводящем к движению механизма, с постоянной скоростью до уровня ограничения.
На фиг.7 представлена схема машинной модели ГТД.
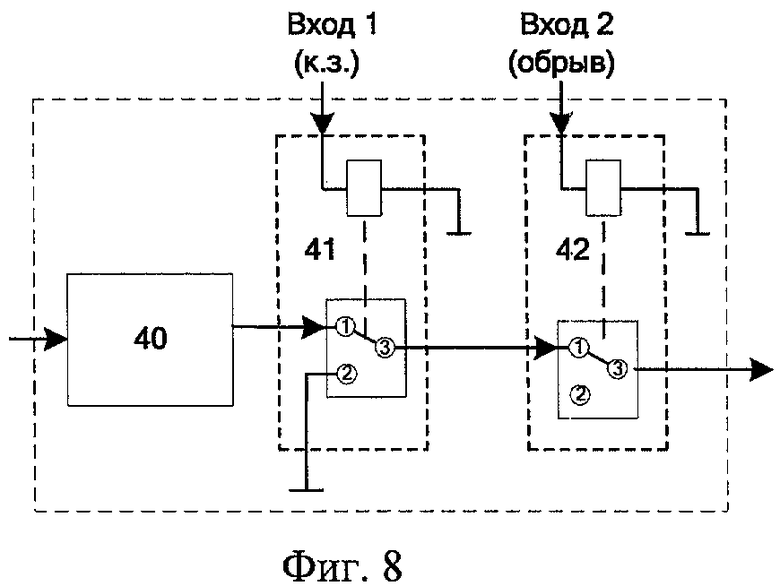
На фиг.8 представлена схема имитаторов датчиков.
Стенд содержит (см. фиг.1) электронную систему управления 1, имитатор исполнительных механизмов 2, усилитель с коэффициентами усиления A+ΔA(j) 3 (где j=5...n+4), усилитель с коэффициентами усиления B+ΔB(j) 4 (где j=5...n+4), первый сумматор 5, первый интегратор 6, имитатор датчиков 7, источник питания 8, наборное поле 9, представляющее собой массив k(n+6) тумблеров Тij (i=1...k, j=1...n+6), кнопку запуска моделирования Sзап. 10, второй интегратор 11, k кнопок включения отказов Si 12-13 (где i=1...k), k потенциометров Ri 14-15 (где i=1...k), k компараторов Ki 16-17 (где i=1...k), причем i-й вход наборного поля 9 (где i=1...k) (см. фиг.2) соединен с первыми контактами тумблеров Tij (где j=1...n+6), j-й выход наборного поля 9 (где j=1...n+6) соединен со вторыми контактами тумблеров Tij (где i=1...k), 1-й, 2-й, 3-й, 4-й управляющие выходы наборного поля 9 соединены с соответствующими 1-м, 2-м, 3-м, 4-м управляющими входами имитатора исполнительных механизмов 2 на включение короткого замыкания, обрыва, фиксации и движения исполнительных механизмов с постоянной скоростью, управляющие выходы с 5-го по (n+4)-й наборного поля соединены с управляющими входами усилителей A+ΔA(j) 3 и B+ΔB(j) 4 на включение j-го отказа двигателя (где j=1...n), (n+5)-й и (n+6)-й выходы наборного поля 9 соединены с управляющими входами имитатора датчиков 7 на включение короткого замыкания и обрыва датчиков, выход электронной системы управления 1 соединен с входом имитатора исполнительных механизмов 2, выход имитатора исполнительных механизмов 2 соединен с входом усилителя с коэффициентами усиления B+ΔB(j) 4, выход которого соединен с первым входом первого сумматора 5, выход первого сумматора 5 соединен с входом первого интегратора 6, выход первого интегратора 6 соединен с входом усилителя с коэффициентами усиления A+ΔA(j) 3 и с входом имитатора датчиков 7, выход усилителя с коэффициентами усиления A+ΔA(j) 3 соединен со вторым входом первого сумматора 5, выход имитатора датчиков 7 соединен с входом электронной системы управления 1, первый контакт кнопки запуска моделирования 10 соединен с положительной шиной источника питания 8, отрицательная шина источника питания заземлена, третий контакт кнопки запуска моделирования 10 соединен с входом второго интегратора 11, второй контакт кнопки запуска моделирования 10 заземлен, выход второго интегратора 11 соединен с третьими контактами k кнопок включения отказов Si 12-13 (где i=1...k), первый контакт i-й кнопки включения отказов Si 12-13 (где i=1...k) соединен с первым входом соответствующего компаратора Ki 16-17 (где i=1...k), второй контакт кнопки включения отказов Si 12-13 (где i=1...k) заземлен, первые контакты k потенциометров Ri 14-15 (где i=1...k) соединены с положительной шиной источника питания, вторые контакты k потенциометров Ri 14-15 (где i=1...k) заземлены, выход i-го потенциометра Ri 14-15 (где i=1...k) соединен со вторым входом соответствующего i-го компаратора Ki 16-17 (где i=1...k), выход i-го компаратора Ki 16-17 (где i=1...k) соединен с i-м входом наборного поля 9.
Способ реализуют следующим образом.
Динамика газотурбинного двигателя моделируется с помощью системы дифференциальных уравнений в пространстве состояний  .
.
В качестве входа имитационной модели ГТД u(t) выступают массовый расход топлива и другие управляющие факторы. В качестве переменных состояния x(t) выбирают частоту вращения ротора турбокомпрессора. При этом переменные состояния одновременно являются выходными переменными.
В заданные моменты времени формируют управляющие сигналы по заранее составленному расписанию на последовательное включение нескольких отказов, путем подачи на вход второго интегратора 11 постоянного положительного напряжения питания 8 и полученный в результате интегрирования линейно возрастающий сигнал подают с помощью k переключателей Si 12-13 (где i=1...k) на первые входы k компараторов Ki 16-17 (где i=1...k), полученный постоянный уровень напряжения с i-го потенциометра Ri 14-15 (где i=1...k) подают на 2-ой вход i-го компаратора Ki 16-17 (где i=1...k), в определенный момент времени, когда линейно нарастающее напряжение превысит установленный с помощью i-го потенциометра Ri 14-15 (где i=1...k) уровень, i-й входной сигнал компаратора Ki 16-17 (где i=1...k) подают на вход наборного поля 9, причем для выбора момента включения i-го отказа заранее настраивают положение среднего контакта i-го потенциометра Ri 14-15 (где i=1...k) и соответствующее выходное напряжение i-го потенциометра Ri 14-15 (где i=1...k), которые пропорциональны моменту времени от начала моделирования, когда должен включиться тот или иной i-й отказ.
Тумблеры Тij (где i=1...k, j=1...n) в наборном поле 9 заранее устанавливают в состояние «замкнуто» или «разомкнуто», чтобы при выборе номера отказа вызывать соответствующие переключения в стенде и имитировать три состояния датчиков и исполнительных механизмов: обрыв провода, короткое замыкание и исправное состояние, а также исправное состояние и различные отказы двигателя.
Имитатор ИМ может быть реализован следующим образом (см. фиг.3). Имитатор содержит реле 18, 19, 20, 21, третий интегратор 22, источник постоянного напряжения С 23, блок ограничения амплитуды 24, источник постоянного напряжения 25, и имеет 4 управляющих входа: «короткое замыкание» 1, «обрыв» 2, «фиксация» 3 и «скорость» 4.
При имитации короткого замыкания входной электрической цепи ИМ на первый управляющий вход имитатора ИМ поступает напряжение питания с наборного поля 9. Этот сигнал вызывает срабатывание реле 18, в результате производится замыкание второго и третьего контактов реле 18, а первый и третий контакты размыкаются. При этом остальные реле находятся в исходном состоянии (замкнуты первый и третий контакты). В этом случае выходная электрическая цепь ЭСУ 1 замыкается на "землю". Кроме того, выходной сигнал из ИМ обнуляется (см. фиг.4).
При имитации обрыва входной электрической цепи ИМ на второй управляющий вход имитатора ИМ поступает напряжение питания с наборного поля 9. Данный сигнал вызывает срабатывание реле 20, в результате замыкаются второй и третий контакты реле 20, а первый и третий контакты размыкаются. При этом остальные реле находятся в исходном состоянии (замкнуты первый и третий контакты). В этом случае на вход третьего интегратора 22 поступает нулевой сигнал и его выходной сигнал остается постоянным (см. фиг.5). При этом положение исполнительного органа остается постоянным.
Кроме этого имеется возможность фиксации исполнительного органа в заданном состоянии, когда исполнительный механизм перестает выполнять команды регулятора. При этом на третий управляющий вход имитатора ИМ поступает напряжение питания с наборного поля 9. Этот сигнал вызывает срабатывание реле 21, в результате производится замыкание второго и третьего контактов реле 21, а первый и третий контакты размыкаются. При этом остальные реле находятся в исходном состоянии (замкнуты первый и третий контакты). В этом случае выход источника постоянного напряжения 25 соединяется со вторым контактом реле 21. На выходе блока ИМ устанавливается постоянный выходной сигнал, который не меняется при выходе.
При имитации движения исполнительного механизма в одну сторону с постоянной скоростью до ограничения на четвертый управляющий вход имитатора ИМ поступает напряжение питания с наборного поля 9, которое вызывает срабатывание реле 19. При этом реле 19 замыкает второй и третий контакты, а первый и третий контакты размыкаются. Остальные реле находятся в исходном состоянии (замкнуты первый и третий контакты). В этом случае постоянное напряжение с источника С 23 поступает на вход третьего интегратора 22 через замкнутые контакты реле 19 и 20. На выходе третьего интегратора 22 вырабатывается сигнал, изменяющийся с постоянной скоростью. Когда этот сигнал достигает заранее заданного уровня ограничения (что соответствует крайнему положению ИМ), этот сигнал ограничивается по амплитуде в блоке ограничения амплитуды 24. Форма полученного сигнала u(t), имитирующего выход ИМ, представлен на фиг.6.
Машинная модель ГТД может быть реализована следующим образом (см. фиг.7). Машинная модель ГТД содержит первый сумматор 5, первый интегратор 6, 2n реле 26-29, второй сумматор 30, третий сумматор 31, первый умножитель 32, второй умножитель 33, источники постоянного напряжения (В, A, ΔB1...ΔBn и ΔA1...ΔAn) 34-39, и имеет n управляющих входов для включения имитации отказов двигателя с 1-го по n-ый.
Нормальное функционирование двигателя при отсутствии отказов имитируется с помощью второго сумматора 30, третьего сумматора 31, первого умножителя 32, второго умножителя 33, источников постоянного напряжения В 34 и А 35. Коэффициенты А и В соответствуют исправному состоянию двигателя. Все реле с 26-29 находятся в исходном состоянии, т.е. замкнуты первый и третий контакты. Второй и третий контакты реле 26-29 разомкнуты, при этом на выходе второго сумматора 30 получаем сигнал, пропорциональный коэффициенту В, а на выходе третьего сумматора 31 - сигнал, пропорциональный коэффициенту А. В результате имитационная модель двигателя определяет величину производной в соответствии с формулой  .
.
Отказы двигателя моделируются путем изменения коэффициентов динамической модели. Модель внезапных отказов - это скачкообразное изменение коэффициента А на величины ΔА, В на ΔB. Величина этих скачков определяется заранее по термодинамической модели двигателя для каждого отказа. Например, в случае обрыва лопатки компрессора снижается КПД компрессора, что выражается в соответствующем изменении коэффициентов ΔА и ΔB в динамической модели. Другие отказы двигателя, например, прогорание камеры сгорания или разрушение лопатки турбины, приводит к другим изменениям коэффициентов ΔA и ΔB.
Таким образом, данная модель двигателя позволяет имитировать n типовых отказов двигателя с помощью соответствующих добавок к коэффициентам ΔA1...ΔAn и ΔB1...ΔBn.
При имитации выбранного i-го отказа двигателя на соответствующий управляющий вход машинной модели ГТД поступает напряжение питания с выходов 5 по n+4 наборного поля 9. Данный сигнал вызывает срабатывание соответствующих реле 26, 27, 28, 29, что приводит к замыканию первого и третьего контактов реле 26, 27, 28, 29, а второй и третий контакты разомкнуты. Сигналы с источников постоянного напряжения ΔBi 36-37 через соответствующие реле поступают на второй вход второго сумматора 30, а сигналы с источников постоянного напряжения ΔAi 38-39 - на второй вход третьего сумматора 31. На выходе второго сумматора 30 формируется постоянное напряжение величиной B+ΔBi, которое умножается на выходной сигнал ИМ u(t) в первом умножителе 32. На выходе третьего сумматора 31 формируется постоянное напряжение величиной A+ΔAi, которое умножается на выходной сигнал модели двигателя x(t) во втором умножителе 33. Полученные после умножения сигналы (A+ΔAi)x и (В+ΔВi)u складываются в первом сумматоре 5, полученный сигнал интегрируется в первом интеграторе 6. Таким образом, динамика газотурбинного двигателя в случае имитации i-го отказа двигателя моделируется с помощью дифференциального уравнения
 , т.е.
, т.е.

Имитатор датчиков может быть реализован следующим образом (см. фиг.8). Имитатор датчиков содержит блок имитатора датчиков 40 и реле 41, 42 и имеет 2 управляющих входа: «короткое замыкание» n+5 и «обрыв» n+6.
При имитации короткого замыкания блока имитатора датчиков на первый управляющий вход имитатора датчиков поступает напряжение питания с (n+5)-го выхода наборного поля 9. Этот сигнал вызывает срабатывание реле 41, в результате производится замыкание второго и третьего контактов реле 41, а первый и третий контакты разомкнуты. При этом реле 42 находится в исходном состоянии (замкнуты первый и третий контакты). В этом случае выход блока имитатора датчиков замкнут на нулевой провод источника питания, и на вход ЭСУ 1 поступает нулевой сигнал (см. фиг.4).
При имитации обрыва цепи датчика на второй управляющий вход блока имитатора датчиков поступает напряжение питания с выхода n+6 наборного поля 9. Этот сигнал вызывает срабатывание реле 42, в результате производится замыкание второго и третьего контактов реле 42, а первый и третий контакты разомкнуты. При этом реле 41 находится в исходном состоянии (замкнуты первый и третий контакты). В этом случае на входе ЭСУ 1 электрическая цепь разрывается.
Использование предлагаемого способа для испытаний САУК ГТД и стенда для его реализации обеспечивает по сравнению с прототипом следующие преимущества:
а) позволяет моделировать несколько отказов датчиков, исполнительных механизмов и двигателя при полунатурных испытаниях САУК ГТД в заранее заданной последовательности;
б) снижается объем натурных испытаний САУК ГТД на двигателе и самолете.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И КОНТРОЛЯ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И СТЕНД ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2331054C2 |
| АВИАЦИОННЫЙ ТРЕНАЖЕР | 1989 |
|
RU1723915C |
| Тренажер оператора энергоемких процессов | 1981 |
|
SU1043720A1 |
| Устройство для оптимального распределения нагрузок между энергоблоками | 1978 |
|
SU736131A1 |
| Устройство для формирования управляющего воздействия следящего привода | 1973 |
|
SU516016A1 |
| Устройство измерения давления с модулями преобразователей давления и способ работы устройства | 2018 |
|
RU2693742C1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НЕСТАЦИОНАРНОГО ОБЪЕКТА С ПЕРЕМЕННЫМ ЗАПАЗДЫВАНИЕМ | 1990 |
|
RU2027214C1 |




Использование: изобретение относится к стендовым испытаниям систем автоматического управления и контроля газотурбинных двигателей (САУК ГТД). Технический результат: повышение надежности комплексных испытаний САУК ГТД за счет моделирования нескольких отказов датчиков, исполнительных механизмов и двигателя в заранее заданной последовательности. Способ полунатурных испытаний САУК ГТД заключается в имитации в реальном масштабе времени параметров двигателя, исполнительных механизмов и датчиков. В заданные моменты времени формируют управляющие сигналы по заранее составленному расписанию на последовательное включение нескольких отказов. Способ реализуется полунатурным стендом для испытаний САУК ГТД, включающим электронную систему управления, имитатор исполнительных механизмов, усилители, первый сумматор, первый интегратор, имитатор датчиков, источник питания, наборное поле. Кроме того, стенд дополнительно содержит кнопку запуска моделирования, второй интегратор, кнопки включения отказов, компараторы, потенциометры. 2 н.п. ф-лы, 8 ил.
 выходного сигнала как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔA(j) и ΔB(j), выбираемые в зависимости от вида моделируемого отказа (где j=1...n - номер отказа), моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения или имитации движения с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, логику переключения ключей для имитации отказов датчиков, ИМ и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле, отличающийся тем, что в заданные моменты времени формируют управляющие сигналы по заранее составленному расписанию на последовательное включение нескольких отказов, путем подачи на вход интегратора постоянного положительного напряжения питания, и полученный в результате интегрирования линейно возрастающий сигнал подают с помощью k переключателей Si (где i=1...k) на первые входы k компараторов Кi (где i=1...k), полученный постоянный уровень напряжения с i-го потенциометра Ri (где i=1...k) подают на 2-й вход i-го компаратора Кi (где i=1...k), в определенный момент времени, когда линейно нарастающее напряжение превысит установленный с помощью i-го потенциометра Ri (где i=1...k) уровень, выходной сигнал i-го компаратора Ki (где i=1...k) в виде напряжения питания поступает на вход наборного поля, причем для выбора момента включения i-го отказа заранее настраивают положение среднего контакта i-го потенциометра Ri (где i=1...k) и соответствующее выходное напряжение i-го потенциометра Ri (где i=1...k), которые пропорциональны моменту времени от начала моделирования, когда должен включиться тот или иной i-й отказ.
выходного сигнала как суммы значения выходного сигнала x(t), умноженного на величину коэффициента А, и входного сигнала u(t), умноженного на величину коэффициента В, и интегрирования полученной производной, выбирают один или несколько имитируемых отказов путем нажатия k кнопок включения отказов, моделируют n отказов газотурбинного двигателя путем изменения коэффициентов динамической модели А и В на приращения ΔA(j) и ΔB(j), выбираемые в зависимости от вида моделируемого отказа (где j=1...n - номер отказа), моделируют отказы исполнительных механизмов путем обрыва или замыкания входной электрической цепи имитатора исполнительного механизма и фиксации положения или имитации движения с постоянной скоростью до положения ограничения, моделируют отказы датчиков путем обрыва или короткого замыкания выходной электрической цепи имитатора датчика, логику переключения ключей для имитации отказов датчиков, ИМ и двигателя задают заранее с помощью k(n+6) тумблеров в наборном поле, отличающийся тем, что в заданные моменты времени формируют управляющие сигналы по заранее составленному расписанию на последовательное включение нескольких отказов, путем подачи на вход интегратора постоянного положительного напряжения питания, и полученный в результате интегрирования линейно возрастающий сигнал подают с помощью k переключателей Si (где i=1...k) на первые входы k компараторов Кi (где i=1...k), полученный постоянный уровень напряжения с i-го потенциометра Ri (где i=1...k) подают на 2-й вход i-го компаратора Кi (где i=1...k), в определенный момент времени, когда линейно нарастающее напряжение превысит установленный с помощью i-го потенциометра Ri (где i=1...k) уровень, выходной сигнал i-го компаратора Ki (где i=1...k) в виде напряжения питания поступает на вход наборного поля, причем для выбора момента включения i-го отказа заранее настраивают положение среднего контакта i-го потенциометра Ri (где i=1...k) и соответствующее выходное напряжение i-го потенциометра Ri (где i=1...k), которые пропорциональны моменту времени от начала моделирования, когда должен включиться тот или иной i-й отказ.
| АБДУЛНАГИМОВ А.И | |||
| и др | |||
| Способ полунатурных испытаний систем автоматического управления и контроля газотурбинных двигателей и стенд для его реализации XXXIII Гагаринские чтения | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| - М.: МАТИ, 03.2007, том 4, с.5-7 | |||
| СПОСОБ ИСПЫТАНИЯ ЭЛЕКТРОННЫХ РЕГУЛЯТОРОВ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2098790C1 |
| RU 2063622 С1, 10.07.1996 | |||
| Машина для намотки кишок | 1929 |
|
SU18107A1 |

