Изобретение относится к области систем автоматического управления (САУ) переходными режимами газотурбинного двигателя (ГТД).
Известны САУ частотой вращения ротора ГТД, воздействующие на расход топлива в основную камеру сгорания, содержащие основной регулятор режима, регулятор разгона, регулятор сброса, выходные сигналы которых воздействуют через селектор минимального сигнала, селектор максимального сигнала и изодромный регулятор на исполнительное устройство, дозирующее топливо в камеру сгорания ГТД [Интегральные системы автоматического управления силовыми установками самолетов / под ред. А.А.Шевякова. - М.: Машиностроение, 1983. - 283 с. Стр. 111, рис.3.11; Адаптивные системы управления газотурбинными двигателями летательных аппаратов / В.Ю. Рутковский, Б.Г.Ильясов, Ю.С.Кабальнов и др. - М.: Изд-во МАИ, 1994. - 224 с. Стр. 149, рис.3.26].
Наиболее близкой по достигаемому техническому результату, выбранной за ближайший аналог, является САУ частотой вращения ротора ГТД, содержащая задатчики частоты вращения ротора, скорости изменения частоты вращения ротора на режиме разгона и скорости изменения частоты вращения ротора на режиме сброса, первый, второй и третий элементы сравнения, регулятор частоты вращения ротора, статический регулятор разгона и статический регулятор сброса, селектор минимального сигнала, селектор максимального сигнала, изодромный регулятор, исполнительное устройство, газотурбинный двигатель, измеритель частоты вращения ротора, дифференциатор [Адаптивные системы управления газотурбинными двигателями летательных аппаратов / В.Ю.Рутковский, Б.Г.Ильясов, Ю.С.Кабальнов и др. - М.: Изд-во МАИ, 1994. - 224 с. Стр. 149, рис.3.26].
Передаточная функция ГТД по частоте вращения ротора при изменении расхода топлива
 Передаточная функция изодромного регулятора
Передаточная функция изодромного регулятора
Пусть передаточная функция регулятора частоты вращения ротора
а передаточная функция статического регулятора разгона
[Адаптивные системы управления газотурбинными двигателями летательных аппаратов / В.Ю.Рутковский, Б.Г.Ильясов, Ю.С.Кабальнов и др. - М.: Изд-во МАИ, 1994. - 224 с. Стр. 149, рис.3.26].
Если передаточные функции исполнительного устройства  , измерителя частоты вращения ротора
, измерителя частоты вращения ротора  , дифференциатора
, дифференциатора  , то передаточные функции отдельных разомкнутых каналов САУ имеют следующий вид:
, то передаточные функции отдельных разомкнутых каналов САУ имеют следующий вид:
- канал регулирования частоты вращения ротора:
 ;
;
- канал разгона:
 .
.
Следовательно, канал разгона является статическим по скорости изменения частоты вращения ротора.
Аналогично это можно показать для канала сброса частоты вращения ротора ГТД.
Недостатком такой САУ является то, что каналы разгона и сброса являются статическими и в результате возникают погрешности в реализации программ разгона и сброса ГТД по частоте вращения ротора. Это подтверждается графиками по скорости изменения частоты вращения ротора [Адаптивные системы управления газотурбинными двигателями летательных аппаратов / В.Ю.Рутковский, Б.Г.Ильясов, Ю.С.Кабальнов и др. - М.: Изд-во МАИ, 1994. - 224 с. Стр. 153, рис.3.28].
Задачей, на решение которой направлено заявляемое изобретение, является повышение точности системы по скорости изменения частоты вращения ротора за счет введения астатизма в каналы управления по разгону и сбросу. Это приводит к улучшению динамических характеристик ГТД по времени и уменьшению статических погрешностей реализации программ управления, что способствует улучшению приемистости ГТД и увеличению его тяги на режиме разгона.
Поставленная задача решается тем, что в системе автоматического управления частотой вращения ротора газотурбинного двигателя, содержащей последовательно соединенные задатчик частоты вращения ротора, первый элемент сравнения, регулятор частоты вращения ротора и селектор минимального сигнала, изодромный регулятор, последовательно соединенные исполнительное устройство, газотурбинный двигатель, измеритель частоты вращения ротора, дифференциатор, второй элемент сравнения и статический регулятор разгона, задатчик скорости изменения частоты вращения ротора на режиме разгона, причем выход измерителя частоты вращения ротора соединен со вторым входом первого элемента сравнения, а второй вход второго элемента сравнения соединен с выходом задатчика скорости изменения частоты вращения ротора на режиме разгона, последовательно соединенные задатчик скорости изменения частоты вращения ротора на режиме сброса, третий элемент сравнения, статический регулятор сброса и селектор максимального сигнала, причем выход дифференциатора соединен со вторым входом третьего элемента сравнения, в отличие от прототипа выход селектора минимального сигнала соединен со вторым входом селектора максимального сигнала, выход изодромного регулятора подключен к входу исполнительного устройства, дополнительно введены управляемый интегратор, вход которого соединен с выходом селектора максимального сигнала, а выход с входом изодромного регулятора, первое логическое устройство, входы которого соединены с входами селектора минимального сигнала, а выход с первым входом элемента вычитания, второе логическое устройство, входы которого соединены с входами селектора максимального сигнала, а выход со вторым входом элемента вычитания, выход которого соединен с входом сброса управляемого интегратора и через первый умножитель с входом начального значения управляемого интегратора, причем выход селектора максимального сигнала подключен ко второму входу первого умножителя.
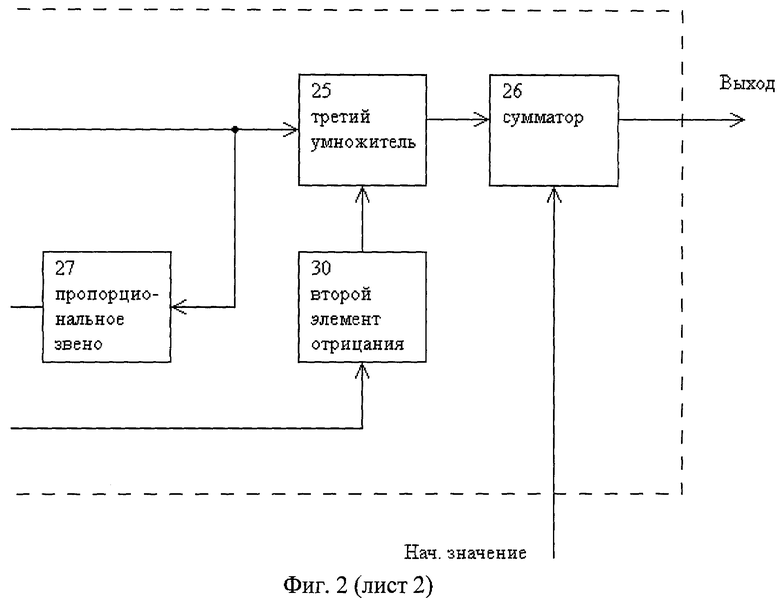
Кроме того, в системе автоматического управления частотой вращения ротора газотурбинного двигателя управляемый интегратор может содержать последовательно соединенные второй умножитель, четвертый элемент сравнения, интегратор, третий умножитель и сумматор, причем выход интегратора через последовательно соединенные пропорциональное звено и четвертый умножитель соединен со вторым входом четвертого элемента сравнения, входом управляемого интегратора является первый вход второго умножителя, а выходом - выход сумматора, вход сброса управляемого интегратора соединен со вторым входом третьего умножителя и через первый и второй элементы отрицания соответственно со вторыми входами второго и четвертого умножителей, вход начального значения управляемого интегратора соединен со вторым входом сумматора.
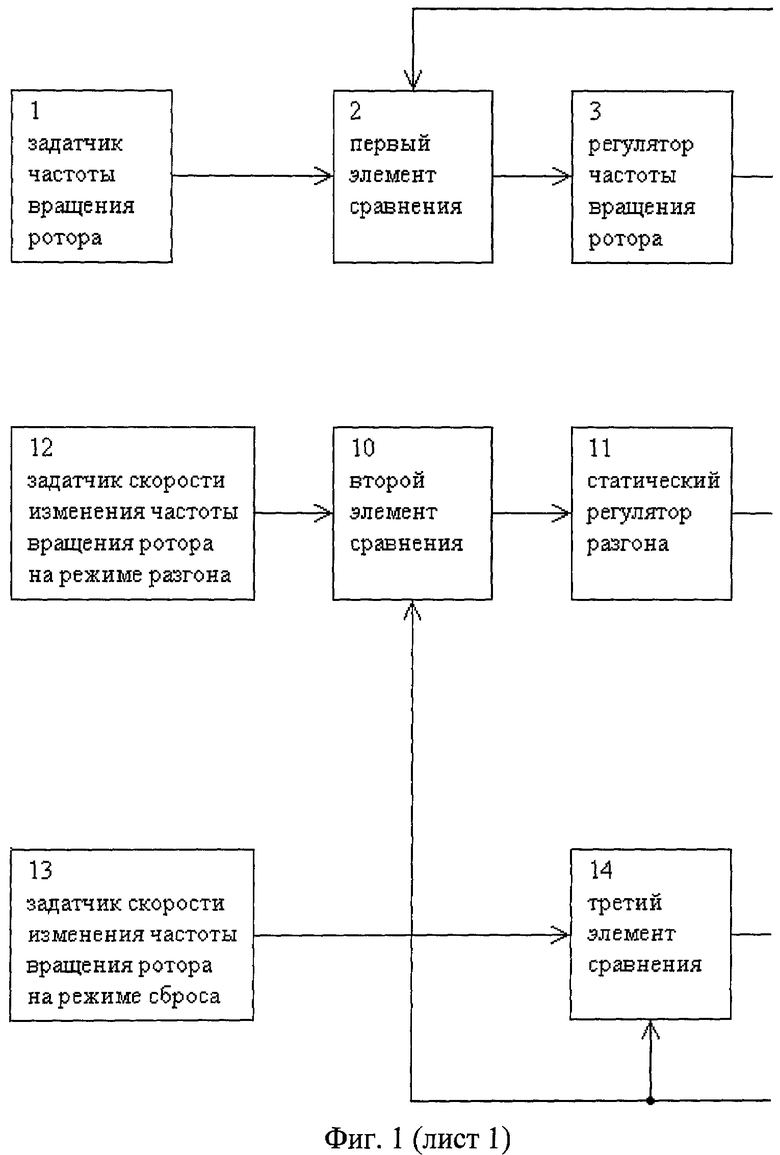
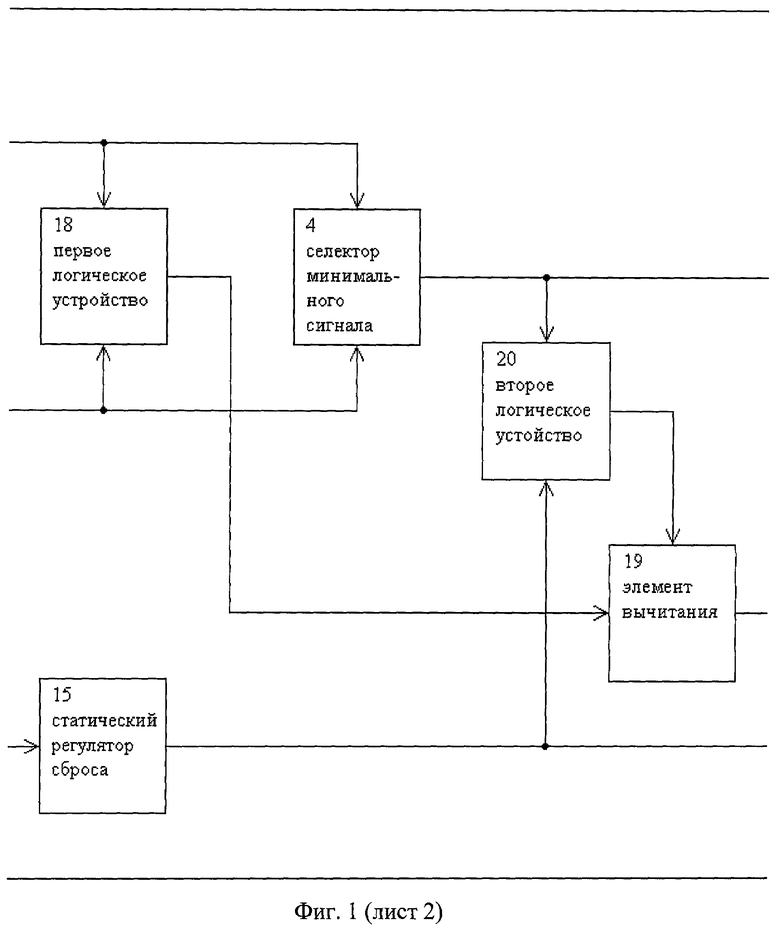
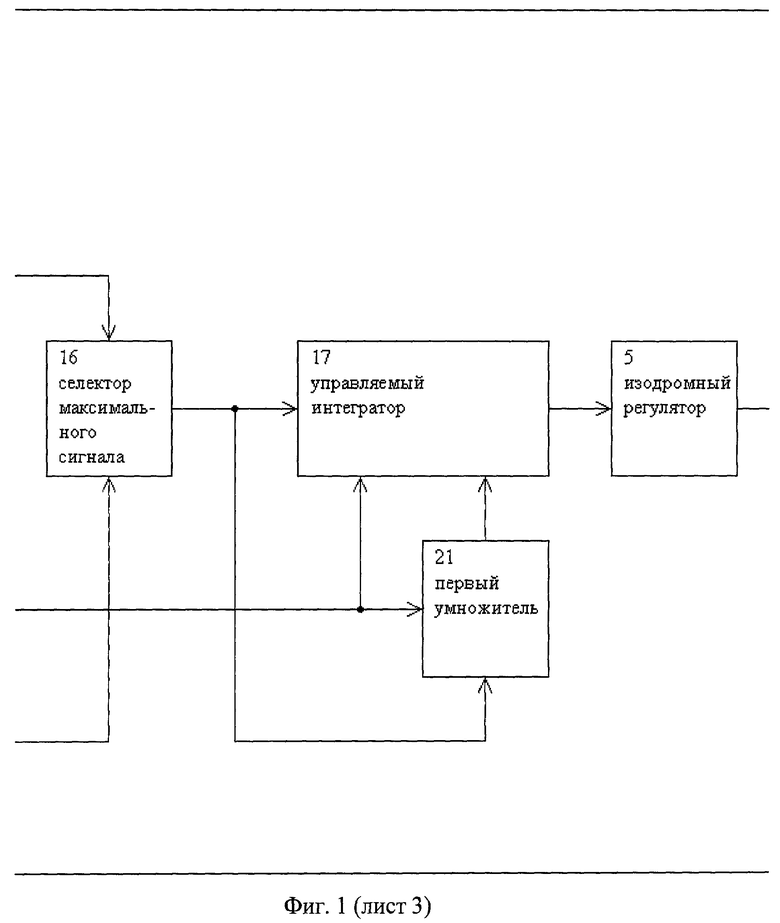
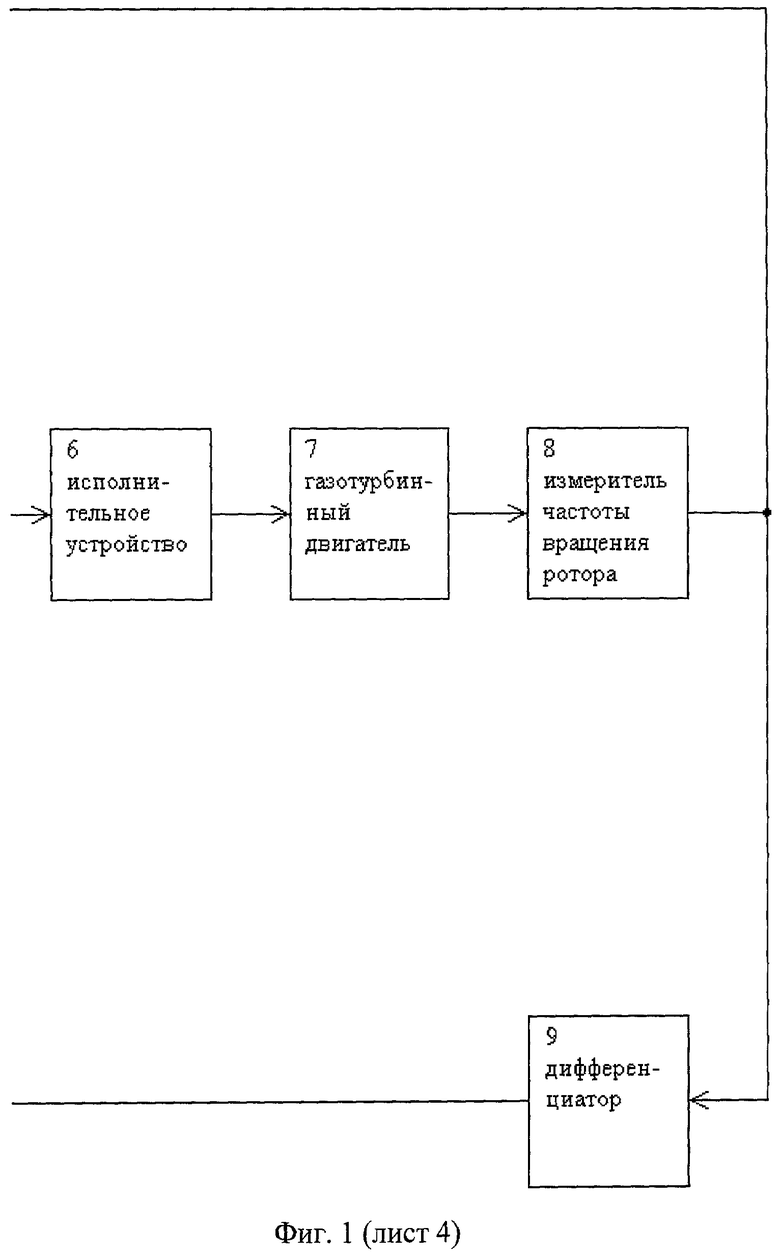
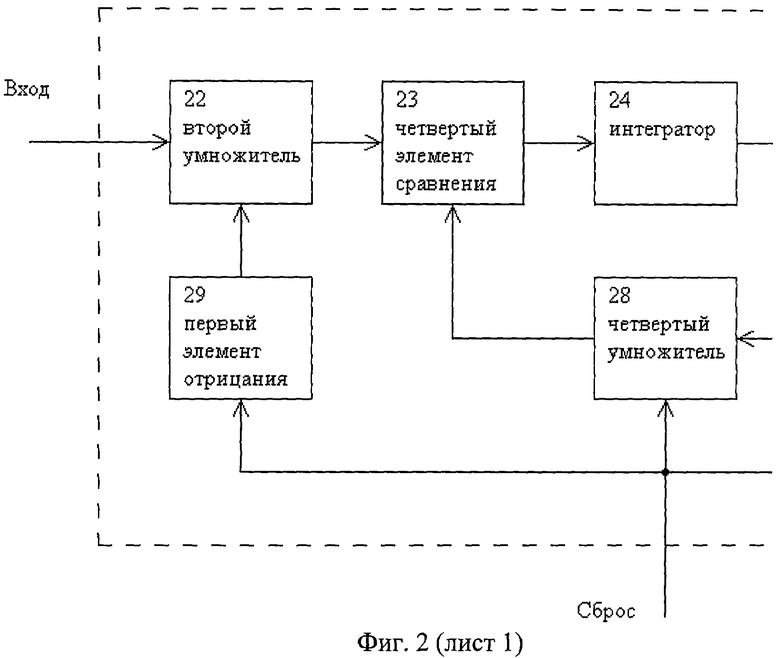
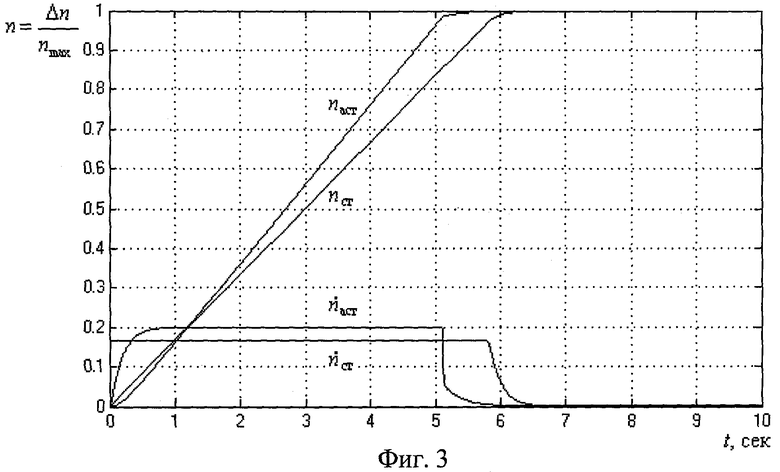
Существо системы поясняется чертежами. На фиг.1 представлена блок-схема системы автоматического управления частотой вращения ротора газотурбинного двигателя, на фиг.2 - блок-схема управляемого интегратора, на фиг.3 - результаты моделирования переходных процессов разгона по частоте вращения ротора и скорости изменения частоты вращения ротора для статического и астатического регуляторов разгона, при этом заданное значение скорости изменения частоты вращения ротора  ; коэффициент передачи разомкнутой системы К=5 с-1.
; коэффициент передачи разомкнутой системы К=5 с-1.
Система автоматического управления частотой вращения ротора газотурбинного двигателя, содержащая последовательно соединенные задатчик частоты вращения ротора 1, первый элемент сравнения 2, регулятор частоты вращения ротора 3 и селектор минимального сигнала 4, изодромный регулятор 5, последовательно соединенные исполнительное устройство 6, газотурбинный двигатель 7, измеритель частоты вращения ротора 8, дифференциатор 9, второй элемент сравнения 10 и статический регулятор разгона 11, задатчик скорости изменения частоты вращения ротора на режиме разгона 12, причем выход измерителя частоты вращения ротора 8 соединен со вторым входом первого элемента сравнения 2, а второй вход второго элемента сравнения 10 соединен с выходом задатчика скорости изменения частоты вращения ротора на режиме разгона 12, последовательно соединенные задатчик скорости изменения частоты вращения ротора на режиме сброса 13, третий элемент сравнения 14, статический регулятор сброса 15 и селектор максимального сигнала 16, причем выход дифференциатора 9 соединен со вторым входом третьего элемента сравнения 14, отличающаяся тем, что выход селектора минимального сигнала 4 соединен со вторым входом селектора максимального сигнала 16, выход изодромного регулятора 5 подключен к входу исполнительного устройства 6, дополнительно содержит управляемый интегратор 17, вход которого соединен с выходом селектора максимального сигнала 16, а выход с входом изодромного регулятора 5, первое логическое устройство 18, входы которого соединены с входами селектора минимального сигнала 4, а выход с первым входом элемента вычитания 19, второе логическое устройство 20, входы которого соединены с входами селектора максимального сигнала 16, а выход со вторым входом элемента вычитания 19, выход которого соединен с входом сброса управляемого интегратора 17 и через первый умножитель 21 с входом начального значения управляемого интегратора 17, причем выход селектора максимального сигнала 16 подключен ко второму входу первого умножителя 21.
Управляемый интегратор содержит последовательно соединенные второй умножитель 22, четвертый элемент сравнения 23, интегратор 24, третий умножитель 25 и сумматор 26, причем выход интегратора 24 через последовательно соединенные пропорциональное звено 27 и четвертый умножитель 28 соединен со вторым входом четвертого элемента сравнения 23, входом управляемого интегратора 17 является первый вход второго умножителя 22, а выходом - выход сумматора 26, вход сброса управляемого интегратора соединен со вторым входом четвертого умножителя 28 и через первый 29 и второй 30 элементы отрицания соответственно со вторыми входами второго 22 и третьего 25 умножителей, вход начальных условий управляемого интегратора 17 соединен со вторым входом сумматора 26.
САУ частотой вращения ротора ГТД работает следующим образом.
В канале регулирования частоты вращения ротора ГТД 7 сигнал с измерителя частоты вращения ротора 8, пропорциональный частоте вращения ротора, поступает на первое сравнивающее устройство 2, где сравнивается с выходным сигналом задатчика частоты вращения ротора 1 и формируется выходной сигнал рассогласования, пропорциональный отклонению частоты вращения ротора ГТД от заданного значения. Этот сигнал поступает на вход регулятора частоты вращения ротора 3, выход которого подключен к первому входу алгебраического селектора минимального сигнала 4.
В канале разгона ГТД 7 сигнал с измерителя частоты вращения ротора 8 дифференцируется в дифференциаторе 9 и поступает на вход второго сравнивающего устройства 10, где сравнивается с выходным сигналом задатчика скорости изменения частоты вращения ротора на режиме разгона 12 и формируется сигнал рассогласования, пропорциональный отклонению скорости изменения частоты вращения ротора от заданного значения. Этот сигнал поступает на вход статического регулятора разгона 11, выход которого подключен ко второму входу алгебраического селектора минимального сигнала 4. Выход селектора минимального сигнала 4 подключен к первому входу селектора максимального сигнала 16.
В канале сброса ГТД 7 сигнал с измерителя частоты вращения ротора 8 дифференцируется в дифференциаторе 9 и поступает на вход третьего сравнивающего устройства 14, где сравнивается с выходным сигналом задатчика скорости изменения частоты вращения ротора на режиме сброса 13 и формируется сигнал рассогласования, пропорциональный отклонению скорости изменения частоты вращения ротора от заданного значения. Этот сигнал поступает на вход статического регулятора сброса 15, выход которого подключен ко второму входу алгебраического селектора максимального сигнала 16.
Выходной сигнал с алгебраического селектора максимального сигнала 16 поступает на вход управляемого интегратора 17 и далее с его выхода на вход изодромного регулятора 5, который через исполнительное устройство 6 изменяет расход топлива в камеру сгорания газотурбинного двигателя 7.
Включение управляемого интегратора 17 в каналы разгона и сброса позволяет сделать их астатическими и, соответственно, повысить точность выдерживания программ управления на переходных режимах. Например, для канала разгона получаем следующую передаточную функцию разомкнутой системы

 ,
,
где Wуи(р)=1/р - передаточная функция управляемого интегратора 17.
Аналогично это можно показать и для канала сброса.
Однако при работе САУ на режиме стабилизации частоты вращения ротора управляемый интегратор 17 должен быть выключен, так как он нарушает требуемые динамические характеристики этого канала
 .
.
Для этого в САУ вводятся логическое устройство 18, выдающее сигнал Lmin, какой из каналов на входе селектора минимального сигнала 4 включается в работу,


и логическое устройство 20, выдающее сигнал Lmax, какой из каналов на входе селектора максимального сигнала 16 включается в работу,

Разность выходных сигналов логических устройств 18 и 20
ΔL=Lmin-Lmax,
определяемая в элементе вычитания 19, далее используется для формирования алгоритма работы управляемого интегратора 17.
При работе канала регулирования частоты вращения ротора выходной сигнал ΔL элемента вычитания 19 подается на вход сброса управляемого интегратора 17, обнуляя его входной и выходной сигналы. Одновременно логический сигнал ΔL используется для установки начального значения управляемого интегратора 17, изменяя коэффициент передачи первого умножителя 21, через который выходной сигнал селектора максимального сигнала 16 подается на вход начального значения управляемого интегратора 17. В результате, если ΔL=0, управляемый интегратор 17 безударно включается в САУ, если ΔL=1, то управляемый интегратор 17 выключается из САУ и выходной сигнал селектора максимального сигнала подключается к входу изодромного регулятора 5.
Управляемый интегратор 17 работает следующим образом.
Выходной сигнал управляемого интегратора 17 определяется в сумматоре 26 как сумма выходного сигнала интегратора 24 и сигнала, поступающего на вход начального значения управляемого интегратора 17. Передаточная функция интегратора 24
 .
.
Входной сигнал управляемого интегратора 17 поступает на вход интегратора 24 через последовательно соединенные второй умножитель 22 и четвертый элемент сравнения 23.
Если ΔL=0, то есть сигнал сброса управляемого интегратора 17 равен нулю, то на управляющие входы второго 22 и третьего 25 умножителей через элементы отрицания 29 и 30 поступают сигналы, равные единице, а на управляющий вход четвертого умножителя 28 - сигнал, равный нулю. При этом входной сигнал управляемого интегратора 17 поступает на вход интегратора 24, а его выходной сигнал - на выход управляемого интегратора 17, так как на втором входе сумматора 26 сигнал начального значения управляемого интегратора 17 равен нулю. Таким образом, интегратор 24 включается в САУ.
Если ΔL=1, то есть сигнал сброса управляемого интегратора 17 равен единице, то на управляющие входы второго 22 и третьего 25 умножителей через элементы отрицания 29 и 30 поступают сигналы, равные нулю, а на управляющий вход четвертого умножителя 28 - сигнал, равный единице. При этом интегратор 24 охватывается через последовательно соединенные пропорциональное звено 27 и четвертый умножитель 28 жесткой отрицательной обратной связью, то есть становится статическим инерционным звеном Wсз(p) и отключается от входа и выхода управляемого интегратора 17
 ,
,
где Wпз(р)=Кпз - передаточная функция пропорционального звена 27. Это позволяет избежать неконтролируемого изменения выходного сигнала интегратора 24. Таким образом, интегратор 24 выключается из САУ, а выходной сигнал управляемого интегратора 17 становится равным выходному сигналу селектора максимального сигнала 16.
Как известно, повышение порядка астатизма САУ приводит к уменьшению установившихся значений ошибки системы, в данном случае ошибок выдерживания программы управления по скорости изменения частоты вращения ротора ГТД на режимах разгона и сброса [Юревич Е.И. Теория автоматического управления. Учебник для студентов вузов. - СПб.: БХВ - Петербург, 2007. - 560 с. Стр. 94]. Для САУ частотой вращения ротора ГТД, результаты моделирования которой приведены на фиг.3, видно, что скорость изменения частоты вращения ротора при введении управляемого интегратора на режиме разгона точно равна заданному значению 
Итак, заявляемое изобретение позволяет осуществить астатическое управление частотой вращения ротора ГТД на режимах разгона и сброса. Благодаря включению управляемого интегратора в САУ ГТД уменьшаются ошибки выдерживания программы управления по скорости изменения частоты вращения ротора ГТД на режимах разгона и сброса, не нарушая при этом работу системы на режиме стабилизации частоты вращения ротора. Вследствие чего в системе увеличивается скорость изменения частоты вращения ротора и сохраняется заданное качество переходных процессов, что отличает ее от ближайших аналогов и позволяет существенно повысить приемистость ГТД и тягу на режиме разгона.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2446298C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2319026C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2010 |
|
RU2446299C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2412366C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1989 |
|
SU1732734A1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2409751C2 |
Изобретение относится к системам автоматического управления (САУ) переходными режимами газотурбинных двигателей (ГТД). Технический результат - повышение точности системы по скорости изменения частоты вращения ротора за счет введения астатизма в каналы управления по разгону и сбросу и тем самым улучшение динамических характеристик ГТД по времени и уменьшение статических погрешностей реализации программ управления, что приводит к улучшению приемистости ГТД и увеличению его тяги на режиме разгона. Данная система, в которой выход селектора минимального сигнала соединен со вторым входом селектора максимального сигнала, выход изодромного регулятора подключен к входу исполнительного устройства, дополнительно содержит управляемый интегратор, вход которого соединен с выходом селектора максимального сигнала, а выход с входом изодромного регулятора, первое логическое устройство, входы которого соединены с входами селектора минимального сигнала, а выход с первым входом элемента вычитания, второе логическое устройство, входы которого соединены с входами селектора максимального сигнала, а выход со вторым входом элемента вычитания, выход которого соединен с входом сброса управляемого интегратора и через первый умножитель с входом начального значения управляемого интегратора, причем выход селектора максимального сигнала подключен ко второму входу первого умножителя. 1 з.п. ф-лы, 7 ил.
1. Система автоматического управления частотой вращения ротора газотурбинного двигателя, содержащая последовательно соединенные задатчик частоты вращения ротора, первый элемент сравнения, регулятор частоты вращения ротора и селектор минимального сигнала, изодромный регулятор, последовательно соединенные исполнительное устройство, газотурбинный двигатель, измеритель частоты вращения ротора, дифференциатор, второй элемент сравнения и статический регулятор разгона, задатчик скорости изменения частоты вращения ротора на режиме разгона, причем выход измерителя частоты вращения ротора соединен со вторым входом первого элемента сравнения, а второй вход второго элемента сравнения соединен с выходом задатчика скорости изменения частоты вращения ротора на режиме разгона, последовательно соединенные задатчик скорости изменения частоты вращения ротора на режиме сброса, третий элемент сравнения, статический регулятор сброса и селектор максимального сигнала, причем выход дифференциатора соединен со вторым входом третьего элемента сравнения, отличающаяся тем, что выход селектора минимального сигнала соединен со вторым входом селектора максимального сигнала, выход изодромного регулятора подключен к входу исполнительного устройства, дополнительно содержит управляемый интегратор, вход которого соединен с выходом селектора максимального сигнала, а выход - с входом изодромного регулятора, первое логическое устройство, входы которого соединены с входами селектора минимального сигнала, а выход с первым входом элемента вычитания, второе логическое устройство, входы которого соединены с входами селектора максимального сигнала, а выход со вторым входом элемента вычитания, выход которого соединен с входом сброса управляемого интегратора и через первый умножитель с входом начального значения управляемого интегратора, причем выход селектора максимального сигнала подключен ко второму входу первого умножителя.
2. Система автоматического управления по п.1, отличающаяся тем, что управляемый интегратор содержит последовательно соединенные второй умножитель, четвертый элемент сравнения, интегратор, третий умножитель и сумматор, причем выход интегратора через последовательно соединенные пропорциональное звено и четвертый умножитель соединен со вторым входом четвертого элемента сравнения, входом управляемого интегратора является первый вход второго умножителя, а выходом - выход сумматора, вход сброса управляемого интегратора соединен со вторым входом третьего умножителя и через первый и второй элементы отрицания соответственно со вторыми входами второго и четвертого умножителей, вход начального значения управляемого интегратора соединен со вторым входом сумматора.
| РУТКОВСКИЙ В.Ю | |||
| и др | |||
| Адаптивные системы управления газотурбинными двигателями летательных аппаратов | |||
| - М.: МАИ, 1994, с.149, рис.3-26 | |||
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ДИНАМИЧЕСКИХ РЕЖИМАХ РАЗГОНА И ДРОССЕЛИРОВАНИЯ | 2006 |
|
RU2337250C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2001 |
|
RU2204044C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2006 |
|
RU2319025C1 |
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |
| US 5212943 А, 25.05.1993. | |||

