Изобретение относится к области приборостроения и может использоваться при решении измерительных задач, в которых необходимо определять расход жидкости и газа с высокой точностью в дискретных точках или узком диапазоне измеряемой величины, например, при проведении метрологических работ с целью передачи размера единицы расхода другим средствам измерений или определении стабильности расхода.
Известно устройство для измерения расхода вещества в напорном трубопроводе [1], в котором поток измеряемой среды из трубопровода поступает в сопло и далее во внутренний канал подвижного тела, расположенного в измерительной камере. В подвижном теле поток плавно изменяет направление на 90 градусов от осевого на радиально-веерное и затем выходит из камеры. Изменение осевого количества движения потока в подвижном теле приводит к возникновению осевой силы, приложенной к этому телу и измеряемой датчиком силы.
Недостатком этого устройства является применение датчика силы, погрешность которого полностью входит в погрешность измерения расхода.
Настоящее изобретение направлено, с одной стороны, на упрощение конструкции, а с другой - на повышение точности за счет уменьшения доли погрешности датчика силы в общей погрешности измерения.
Технический результат, создаваемый настоящим изобретением, состоит в том, что в случае измерения расхода в дискретной точке датчик силы вообще исключается из устройства, его роль выполняет само подвижное тело, являющееся мерой веса и выступающее, таким образом, в качестве гири специальной формы, а измерительная информация считывается посредством электрического сигнала, возникающего в момент измерения. В случае измерения расхода в узком диапазоне применяется датчик силы, но он воспринимает только часть силы, остальная часть которой компенсируется весом подвижного тела. В этом случае погрешность датчика силы входит в общую погрешность измерения с коэффициентом, зависящим от соотношения между измеряемой и компенсируемой частями силы. В узком диапазоне расхода этот коэффициент существенно меньше единицы.
Указанный результат достигается тем, что устройство располагается в пространстве так, что его ось симметрии занимает вертикальное положение, а поток вещества набегает снизу вверх. Подвижное тело заключено в камеру с небольшим радиальным и осевым зазором и может в небольших пределах перемещаться вдоль оси.
Вариант устройства без датчика силы схематично представлен на чертеже, позиция а. Направление движения потока показано стрелками.
В нижней точке подвижное тело опирается на деталь, содержащую подводящее сопло, в верхней точке - в крышку камеры. Подвижное тело или полностью изготовлено из металла, или имеет металлические торцы. Деталь, содержащая подводящее сопло, и крышка содержат пары электродов, замыкающихся через торцы подвижного тела. Электроды включены во внешнюю электрическую цепь, содержащую источник питания и прибор для регистрации тока. При нахождении подвижного тела в нижней или верхней точках замыкаются соответственно нижние или верхние пары электродов. Ток, идущий через регистрирующий прибор при замыкании нижних и верхних электродов, имеет противоположный знак. Таким образом, по знаку тока можно определить положение подвижного тела. Если подвижное тело находится в безразличном равновесии между нижним и верхним положениями, ток равен нулю.
Устройство работает следующим образом.
При наличии потока вещества к подвижному телу приложены силы: сила F, равная скорости изменения осевого количества движения измеряемой среды в подвижном теле, вес подвижного тела в воздухе Р и архимедова сила Т, которые выражаются формулами


где ρис и ρnm - плотность измеряемой среды и подвижного тела (кг/м3), Q - объемный расход измеряемой среды (м3/с), S, m и Vnm - площадь входного отверстия (м2), масса (кг) и объем (м3) подвижного тела, g - ускорение силы тяжести (м/с2).
Результирующая сила, приложенная к телу, равна нулю при таком значении расхода Q0, при котором выполняется условие

Величина расхода Q0 равна
В выражении (3) величины m, g, S, ρnm являются постоянными, величина ρис зависит от измеряемой среды. Значения этих величин считаются известными.
В момент равновесия подвижного тела по выражению (3) определяется значение расхода.
При Q=Q0, когда подвижное тело находится в «невесомости», ток равен нулю. При незначительном уменьшении или увеличении расхода подвижное тело опускается вниз или поднимается вверх, замыкается соответствующая пара электродов, по знаку тока можно определить положение подвижного тела. Таким образом, в этом варианте устройства результатом измерения является информация о том, в каком интервале или точке находится значение расхода: Q<Q0, Q=Q0, Q>Q0.
Подвижное тело отрывается от нижней опоры, поднимается вверх и касается верхней опоры при одном и том же значении расхода, незначительно превышающего значение Q0. Для того чтобы отрыв от нижней опоры и контакт с верхней опорой происходили при значениях расхода, отличающихся на заданную величину, между верхней опорой и подвижным телом устанавливается пружина, работающая на сжатие (чертеж, позиция б). При движении тела вверх пружина сжимается и обеспечивает добавку к силе, приложенной к подвижному телу сверху вниз. Таким образом, отрыв подвижного тела от нижней опоры происходит при значении расхода Q≅Q1, а контакт с верхней опорой происходит при значении расхода Q≅Q2, Q2>Q1. Ток равняется нулю в интервале расхода Q1<Q<Q2. В этом варианте устройства результатом измерения является информация о том, в каком из трех интервалов находится значение расхода: Q<Q1, Q1≤Q≤Q2, Q>Q2. Значения Q1 и Q2 близки друг к другу.
Роль пружины может играть пара постоянных магнитов, обращенных друг к другу одноименными полюсами. Один магнит устанавливается в подвижном теле, другой - в верхней крышке (чертеж, позиция в). Так как при сближении магнитов сила отталкивания увеличивается, сила, приложенная к подвижному телу сверху вниз в его верхнем положении, больше той же силы в его нижнем положении.
Вариант устройства с датчиком силы схематично представлен на чертеже, позиция г. Датчик силы, установленный в верхней крышке, предназначен для измерения силы, действующей со стороны подвижного тела, когда оно входит в соприкосновение с датчиком. Когда подвижное тело находится в нижнем положении, между датчиком силы и подвижным телом существует зазор. Такое положение сохраняется до тех пор, пока расход Q не превысит «равновесное» значение Q0. При Q>Q0 подвижное тело поднимается вверх и нагружает датчик силой f, равной

Значение расхода вычисляется по формуле
В формуле (5) f является значением измеренной силы (H). В этом варианте устройства результатом измерения является конкретное значение расхода в интервале Q≥Q0.
В погрешность измерения расхода погрешность измерения силы f входит с коэффициентом f/(mg+f). При небольших значениях этого коэффициента высокая точность измерения расхода обеспечивается при сравнительно невысокой точности измерения силы.
Обозначения на чертежах:
Источники информации
1. Патент RU 2134866 С1. Устройство для измерения расхода вещества в напорном трубопроводе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ВЕЩЕСТВА В НАПОРНОМ ТРУБОПРОВОДЕ | 1996 |
|
RU2134866C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ВОЗМОЖНОСТЬЮ ДИСТАНЦИОННОЙ ГРАДУИРОВКИ И СПОСОБ ИЗМЕРЕНИЯ ПОСРЕДСТВОМ ТАКОГО ДАТЧИКА | 2011 |
|
RU2502955C2 |
| Устройство для измерения технических характеристик механоэлектрических преобразователей с емкостным выходом и способ измерения коэффициента преобразования по заряду (варианты) | 2023 |
|
RU2797751C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕПЛОПРОВОДНОСТИ ФЛЮИДОНАСЫЩЕННЫХ ПОД ДАВЛЕНИЕМ ПОРИСТЫХ ТЕЛ | 2012 |
|
RU2492455C1 |
| Способ определения гистерезисных потерь крутильной системой при повышенных температурах | 2018 |
|
RU2680976C2 |
| Способ определения гистерезисных потерь крутильной системой | 2015 |
|
RU2614647C1 |
| РАСХОДОМЕР РОТОРНЫЙ | 2014 |
|
RU2562936C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕПЛОЭФФЕКТИВНОСТИ ТЕПЛООБМЕННИКОВ | 2009 |
|
RU2395756C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЭЛЕКТРОПРОВОДНОЙ ЖИДКОСТИ | 2011 |
|
RU2474790C1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗМЕРЕНИЯ ВЫСШЕЙ И НИЗШЕЙ УДЕЛЬНОЙ ТЕПЛОТЫ СГОРАНИЯ ГОРЮЧИХ ГАЗОВ | 2000 |
|
RU2171466C1 |
Изобретение относится к области приборостроения и может использоваться при решении измерительных задач, в которых необходимо определить расход жидкости и газа с высокой точностью. Технический результат направлен на упрощение конструкции и на повышение точности. Устройство для измерения расхода жидкости и газа с помощью плавающей гири содержит цилиндрическое подвижное тело, помещенное с небольшим зазором в цилиндрическую измерительную камеру с возможностью свободного осевого перемещения между нижней и верхней опорами и имеющее внутренний канал для преобразования направления поступающего из сопла потока измеряемой среды на 90 градусов из осевого в радиально-веерное с соотношением площадей входного и выходного отверстий, обеспечивающим равенство статических давлений на входе и выходе. При этом ось подвижного тела располагается вертикально, поток поступает снизу вверх, положение подвижного тела зависит от соотношения веса подвижного тела и силы, приложенной к нему со стороны потока и зависящей от расхода. Причем значение расхода определяется точно при равновесном состоянии подвижного тела, когда оно находится между нижней и верхней опорами, в каждой из которых установлены электроды, включенные в электрическую цепь, содержащую источник питания и прибор регистрации тока, электроды замыкаются через торцы подвижного тела с возможностью изменения значения тока при нарушении или возникновении контакта с электродами. Кроме того, ток, протекающий через верхние и нижние электроды при регистрации имеет разный знак. 2 з. п. ф-лы, 1 ил.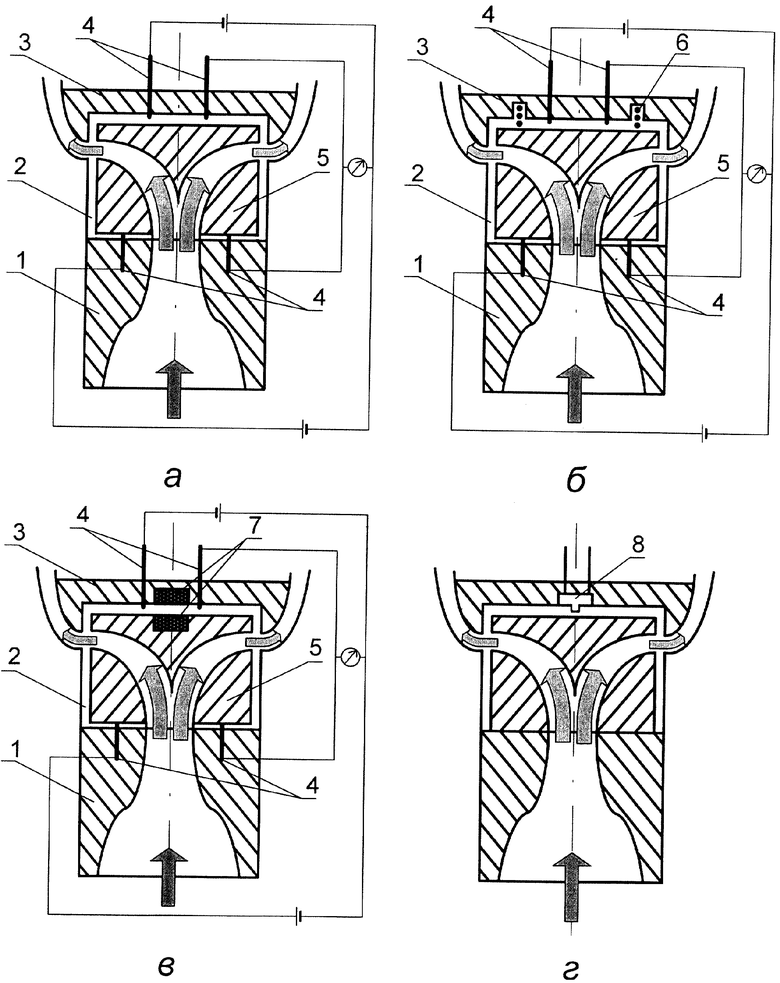
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ВЕЩЕСТВА В НАПОРНОМ ТРУБОПРОВОДЕ | 1996 |
|
RU2134866C1 |
| US 4307601 А, 29.12.1981 | |||
| US 4479377 А, 30.10.1984 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ГАЗА | 1995 |
|
RU2116628C1 |

