Изобретение относится к области измерений, а именно к измерениям основных технических характеристик (масса, коэффициент преобразования по заряду, коэффициент преобразования по напряжению, ёмкость электрическая, тангенс угла диэлектрическаих потерь, знак полярности поляризации) механоэлектрических преобразователей (МЭП) с емкостным выходом (например, пьезоэлектрических элементов /ПЭ/ и пьезопленок). Изобретение может быть использовано при исследованиях и производстве механоэлектрических преобразователей в условиях научных и производственных лабораторий и цехов.
Известны устройства для измерения пьезомодуля d33 статическим и квазистатическим методами (пьезомодуль d33 является параметром пьезоматериала и численно совпадает с коэффициентом преобразования по заряду D пьезоэлемента). В ОСТ 11 0444–87 (введен в действие 01.01.1988 г. Министерством электронной промышленности СССР, статус действующий) описано устройство для измерения пьезомодуля в квазистатическом режиме. При измерении этим методом образец подвергается действию переменной механической силы с частотой на порядок ниже собственной резонансной частоты измеряемого образца, но не ниже 30 Гц. Сущность метода заключается в том, что измеряемый образец вставляют в держатель, подвергают воздействию стабилизированной переменной механической силы развиваемой вибратором, нагружают образец на конденсатор емкостью не менее чем в 20 раз превышающей его собственную емкость и измеряют падение напряжения на конденсаторе. Значение пьезомодуля рассчитывают по определённой формуле. В ОСТ 11 0444–87 также описано устройство для измерения пьезомодуля в статическом режиме. При измерении этим методом пьезомодуль определяют путем измерения значения заряда на электродах образца в момент снятия нагрузки, приложенной по оси поляризации
Известны устройства для измерения пьезомодуля: Пьезоанализатор D33 (Sonipat, Индия. Компания Concord Transducers And Instruments Company https://www.indiamart.com/concordtransducers/piezo-d33-test-meter.html), Пьезометрические системы d33 (Фирма “PIEZOTEST” Пьезотест Pte. LTD. СИНГАПУР, https://www.piezotest.com/d33piezometer.php) и Измеритель широкого диапазона D33 APC International, Ltd. USA Piezo d33 Test System https://www.americanpiezo.com/standard-products/d33-meter.html.
Вышеприведенные приборы имеют отдельные узлы механического нагружения, выполненные на базе электродинамических вибраторов со встроенными, или внешними, тестовыми образцами для контроля или стабилизации переменной силы. Фактически результатом измерения коэффициента преобразования испытуемого образца является отношение зарядов, генерируемых испытуемым и тестовым образцами при воздействии на них одинаковых сил. Для того чтобы механический и электрический контакт испытуемого образца с держателями не нарушался даже при отрицательном направлении переменной составляющей силы создается начальное сжимающее усилие существенно превышающее амплитуду переменной силы. Начальное сжимающее усилие регулируется вручную и обеспечивается жесткостью подвески штока вибратора, а контролируется на слух по достижению прекращения дребезга с некоторым запасом.
Наиболее близким по выполнению и достигаемому результату является устройство для измерения коэффициета преобразования, содержащее генератор механической силы, связанный механически с датчиком механического усилия, измеритель отношения напряжений, включающий также эталонный резистор (а.с. SU № 1205073 A, кл. G01R 29/22, опубл. в БИ, 15.01.1986).
Это устройство не позволяет однозначно судить о результате измерения, так как этот результат получается путем измерения отношения напряжений с выходов исследуемого пьезоэлемента и тестового образца, который механически связан с исследуемым пьезоэлементом, при этом для калибровки используют пьезоэлемент с известным пьезомодулем. Однако не раскрывается что такое пьезоэлемент с известным пьезомодулем при том, что поверочной схемы, позволяющей проследить единицу измерения пьезомодуля не существует.
Техническим результатом изобретения является возможность получения результатов измерений коэффициента преобразования по заряду D с использованием единиц измерения системы СИ без сравнения с показателями механоэлектрических преобразователей (например, пьезоэлементов) с известным коэффициентом преобразования по заряду D (пьезомодулем) и обеспечение возможности измерения нескольких технических характеристик механоэлектрических преобразователей одним устройством.
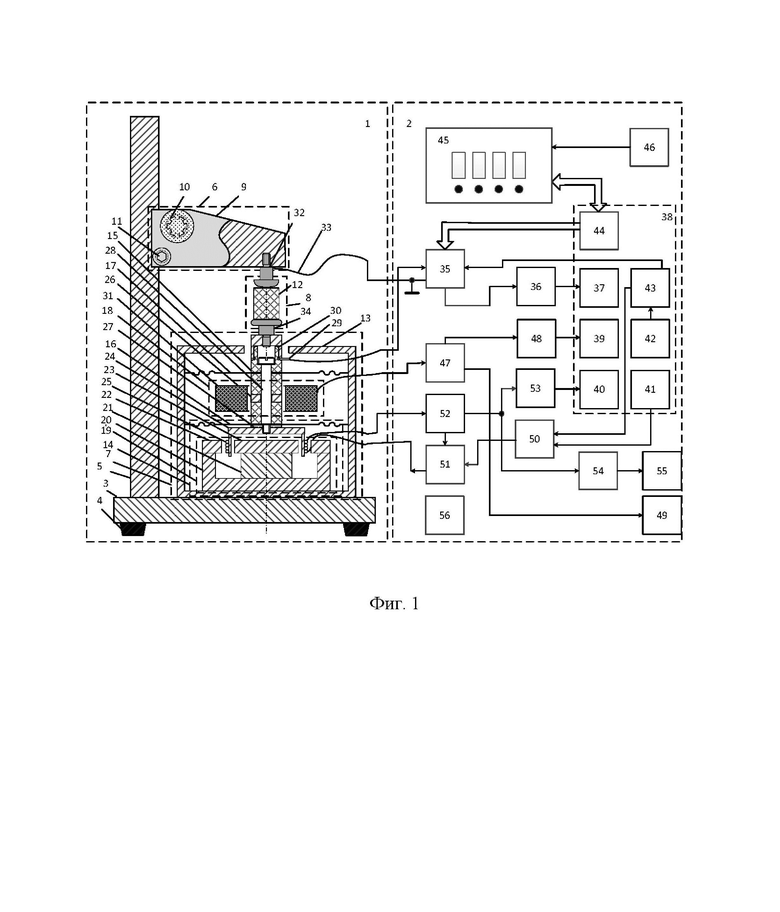
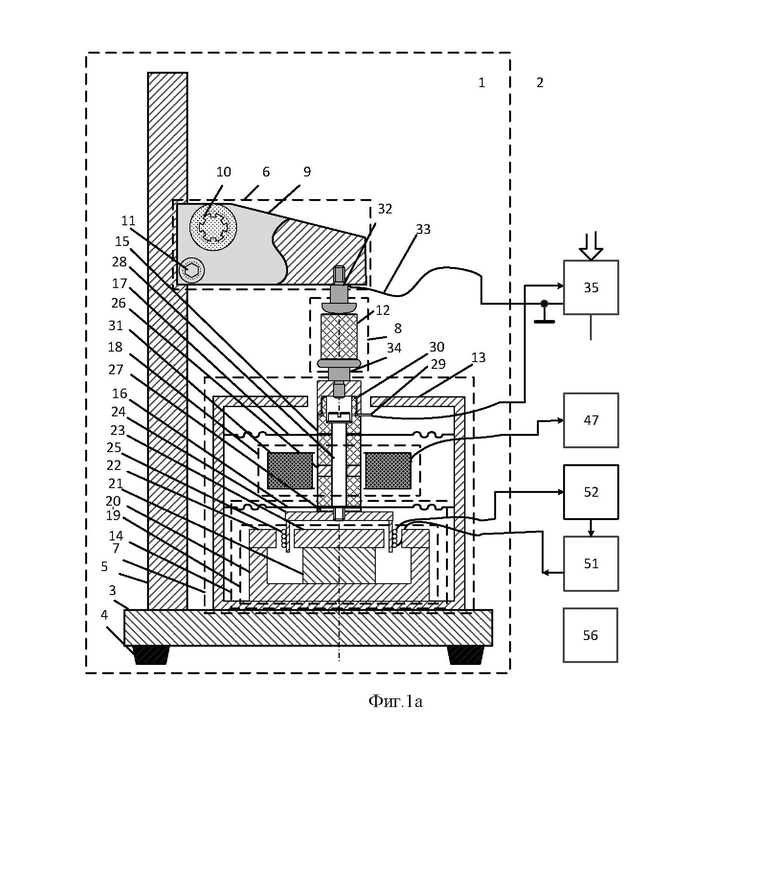
Технический результат достигается тем, что устройство для измерения технических параметров механоэлектрических преобразователей с емкостным выходом включает узел механического нагружения 1 (предназначенный для установки испытуемого образца с целью измерения его параметров) и узел блока управления, обработки сигналов и индикации 2 (предназначенный для выработки сигналов управления режимами работы, приема и обработки сигналов измерительной информации, взаимодействия с оператором, индикацию результатов измерения);
при этом узел механического нагружения 1 включает привод механический 6 (предназначенный для обеспечения возможности измерения параметров образцов различной высоты), выполненный с возможностью вертикального перемещения, включает также измерительную позицию 8 (предназначенную для размещения, испытуемого образца), включающую верхний держатель 32, связанный с приводом механическим 6 и общим проводом 33 (предназначенным для связи с блоком управления), и нижний держатель 34, и при этом выполненную с возможностью размещения в ней испытуемого образца 12, оснащенного электродами, с возможной через его нижний электрод связью с нижним держателем 34 и лепестком контактным 29, а через верхний электрод связью с её верхним держателем 32 и с общим проводом; узел механического нагружения включает также генератор механической силы 7 (предназначенный для создания нормированных сил статического сжатия и динамического воздействия на испытуемый образец), включающий преобразователь электрического тока в силу электродинамический (ЭДП) 14, состоящий из неподвижной магнитной системы 19, составленной из магнитопровода 20, магнита 21 и полюсных наконечников 22 и 23 (формирующих радиально направленное равномерное магнитное поле в зазоре между ними), и подвижной части, составленной из катушки 24 с намотанной на неё обмоткой 25, расположенной в зазоре между полюсными наконечниками, включающий также шток 15 (предназначенный для передачи силы к испытуемому образцу), подвешенный на двух мембранах 16 и 17 (устанавливающих его положение по горизонтали и обеспечивающих его возможное перемещение строго в вертикальном направлении) и связанный с катушкой 24 и с измерительной позицией 8 через её нижний держатель 34; генератор механической силы 7 включает также датчик положения бесконтактный (ДП) 18 (предназначенный для контроля положения штока 15 в вертикальном направлении) со связанным со штоком 15 подвижным элементом 26 (выполненным с возможностью его перемещения совместно со штоком 15), который связан без механического взаимодействия (например, посредством электромагнитного поля высокой частоты или иным бесконтактным методом) с неподвижным элементом 31 (выполненным с возможностью регулировки положения по высоте, т.е. юстировки начального положения), связанным, в свою очередь, с магнитопроводом 20 магнитной системы 19 (например, через корпус 13 и связанное с ним основание 3);
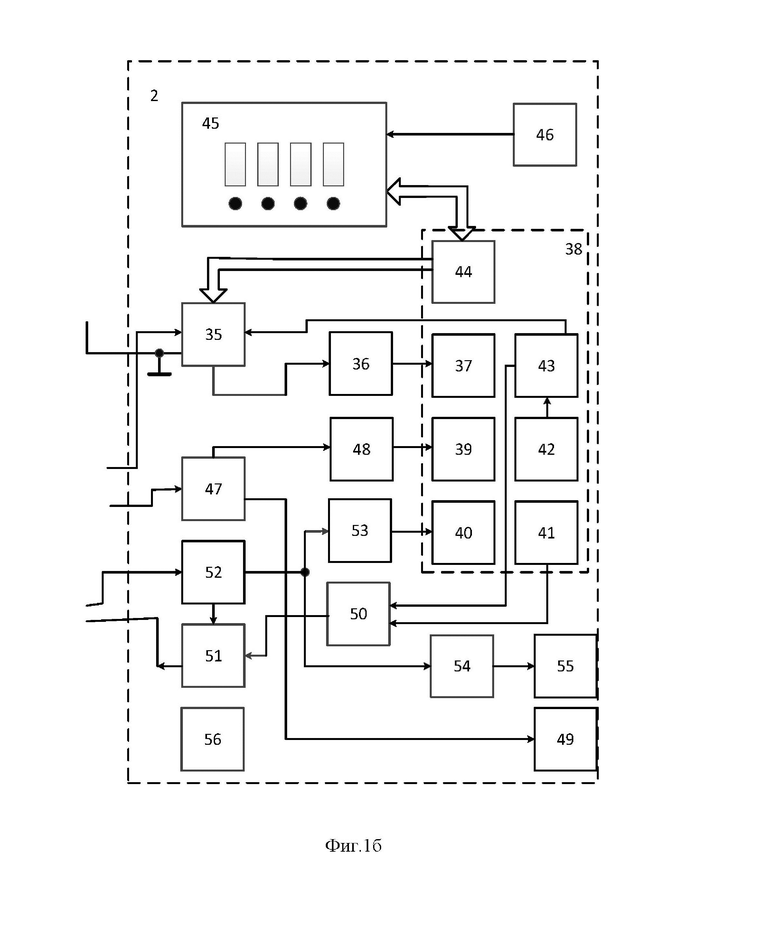
при этом узел блока управления, обработки сигналов и индикации 2, включает систему питания 56 (обеспечивающую на своих выходах несколько стабилизированных напряжений постоянного тока для питания всех узлов блока 2), связанную со всеми его узлами, усилитель измерительный 35, вход которого активным электродом соединён с нижним электродом испытуемого образца 12 через нижний держатель 34 (например, соединительным проводом с лепестком контактным 29, и через колпачок резьбовой 30 штока 15) и пассивным электродом соединён через верхний держатель 32 и общий провод 33 с верхним электродом испытуемого образца 12, а выход усилителя измерительного 35 через буфер аналого-цифрового преобразователя № 0 (буфер АЦП0) 36 связан со входом аналого-цифрового преобразователя № 0 (АЦП0) 37, являющегося составной частью микроконтроллера 38 (который является центральным вычислительным и управляющим ядром блока управления, обработки сигналов и индикации 2, работающий под управлением загруженной в него программы), который также содержит связанные между собой аналого-цифровой преобразователь №1 (АЦП1) 39, аналого-цифровой преобразователь № 2 (АЦП2) 40, цифро-аналоговый преобразователь № 0 (ЦАП0) 41, цифро-аналоговый преобразователь № 1 (ЦАП1) 42, коммутатор цифро-аналогового преобразователя № 1 (коммутатор ЦАП1) 43, связанный своим выходом с усилителем измерительным 35, и группу цифровых входов/выходов 44, связанных своим выходом также с усилителем измерительным 35 (через которую микроконтроллер управляет режимами работы усилителя измерительного 35), а своим входом/выходом связанных (для обмена информацией) с терминалом 45 и через него с рычагом управления 46;
узел блока управления 2 включает также нормализатор датчика положения 47, своим входом, связанный с неподвижной частью 31 бесконтактного датчика положения 18, а выходом с буфером аналого-цифрового преобразователя №1 (буфер АЦП1) 48, связанным со входом АЦП1 39, и, через второй выход, связанный с контрольным гнездом датчика положения 49;
узел блока управления 2 включает также датчик тока 52, который своим входом связан с обмоткой 25 катушки 24 ЭДП 14, а своим выходом через буфер аналого-цифрового преобразователя №2 (буфер АЦП2) 53 связан со входом АЦП2 40, а через нормализатор датчика тока катушки 54 связан с контрольным гнездом датчика тока катушки 55; своим выходом датчик тока 52 также связан с усилителем тока катушки 51, связанным своим выходом с обмоткой 25 катушки 24 ЭДП 14, а своим входом через сумматор токов 50 связан с ЦАП0 41 и ЦАП1 42 через коммутатор 43.
Возможность вертикального перемещения механического привода 6, может быть реализована, например, выполнением его в виде приспособления, включающего каретку 9, выполненную с возможностью безлюфтового перемещения её по стойке 5, закрепленной на основании 3 (предназначенного для установки на нем всех прочих элементов конструкции и обеспечения, тем самым, единства, прочности и необходимой жесткости устройства в целом), перпендикулярно к нему, посредством рукоятки 10 привода механического 6 с фиксацией в нужном положении фиксатором 11, обеспечивающим трение покоя, достаточное для обеспечения неподвижности каретки 9 и, соответственно, необходимой жесткости упора для испытуемого образца при проведении всех видов измерений кроме взвешивания. При этом каретка выполняется связанной с верхним держателем 32 измерительной позиции 8 (например, столиком) и с возможностью её перемещения, например, до касания верхнего держателя с верхним электродом испытуемого образца, создавая, тем самым, механический упор и электрический контакт верхнего электрода образца с измерительной схемой.
Возможность вертикального перемещения механического привода может быть реализована также и электромеханическим способом, обеспечивающим жесткое стопорение по окончании перемещения.
Измерительная позиция 8 предназначена для размещения в ней испытуемого образца 12 оснащенного верхним и нижним электродами (на чертеже представленными утолщённой линией без указания цифрами для упрощения изображения), приложения к нему сил, создаваемых генератором механической силы 7 и обеспечения электрической связи с блоком управления 2. Держатели могут быть выполнены в виде сменных верхнего 32 и нижнего 34 столиков, расположенных соосно друг другу вдоль вертикальной оси координат. Верхний столик 32 может иметь резьбовое соединение с кареткой 9 привода механического 6, а нижний может быть ввинчен в шток 15 генератора механической силы через его колпачок 30. Такая связь передаёт от катушки 24 генератора механической силы 7 через шток 15 (через его колпачок 30 и нижний столик 34) силовое воздействие на испытуемый образец 12, упирающийся в верхний столик 32, обеспечивая в то же время электрическую связь испытуемого образца с усилителем измерительным 35 блока управления 2 за счёт связи нижнего электрода испытуемого образца через нижний держатель (и, например, колпачок 30 и лепесток контактный 29, присоединённый к соединительному проводу) с активным электродом входа усилителя измерительного 35 и, за счёт связи верхнего электрода через верхний держатель 32 измерительной позиции 8 и через общий провод 33, с пассивным электродом входа усилителя измерительного 35.
Соосность столиков может быть обеспечена юстировкой стойки 5. Штатные столики могут быть заменены на другие для повышения точности за счет согласования их механических характеристик с испытуемым образцом и обеспечения возможности измерения параметров образцов сложных конфигураций.
Генератор механической силы может быть установлен в отдельном корпусе 13.
Датчик положения бесконтактный (ДП) 18 генератора механической силы контролирует положение штока 15 и, вместе с ним, катушки 24 по вертикали и предназначен для обеспечения проведения измерений при строго фиксированном его положении, что полностью исключает влияние нелинейности ЭДП 14 на результирующую погрешность измерения коэффициента преобразования (что обеспечивает возможностьь получения результатов измерений без использования сравнения с эталонными образцами). Наличие ДП 18 также обеспечивает возможность взвешивания испытуемого образца 12 компенсационным методом. Кроме того ДП 18 выполняет основную роль при самотестировании устройства. ДП 18 должен иметь высокую разрещающую способность. Для обеспечения возможности контроля положения штока внешними приборами ДП 18 оснащен контрольным гнездом 49, подключенным через нормализатор 47 и может быть откалиброван по коэффициенту преобразования перемещения штока в напряжение на гнезде 49.
Подвижный элемент 26 ДП 18 связан со штоком, при этом, например, может быть зажат винтом между частями штока, может быть вклеен в шток или встроен в шток каким либо иным способом (например нанесением кольцеобразной металлизации на сам шток). Неподвижный элемент 31 ДП 18 связан механически бесконтактно (например, посредством электромагнитного поля высокой частоты) с подвижной частью 26 ДП 18 и механически непосредственно с магнитопроводом 20 (например, через корпус 13 и, через связанное с ним основание 3), относительно которого перемещается шток.
ДП 18 также может быть выполнен и на других физических принципах, например электростатическом, оптическом и т.п.
Преобразователь электрического тока в силу электродинамический (ЭДП) 14 генератора механической силы 7 служит для преобразования электрического тока через катушку 24 в механическую силу приложенную к штоку 15. ЭДП может быть закреплён в корпусе 13 для экранирования. Конструктивно ЭДП 14 представлен по классической схеме, подобной конструкции электродинамической головки громкоговорителя. (Справочник по радиоэлектронным устройствам. В 2-х томах. Т. 2 Под ред.Д. П. Линде - М.: Энергия, 1978. Стр. 225). Катушка 24 ЭДП 14 может быть выполнена укороченной для увеличения коэффициента преобразования тока в силу, так как перемещение катушки практически отсутствует и нелинейность ЭДП не влияет на результат измерений.
Шток 15 (являющийся самостоятельной частью генератора механической силы 7), предназначенный для передачи силы к испытуемому образцу от катушки 24, выполнен предпочтительно из электроизоляционного материала и может быть связан с катушкой через шайбу 27 винтом 28. Связь с измерительной позицией 8 через её нижний держатель 34 может быть осуществлена выполнением держателя с возможностью быть ввинченным в резьбовое отверстие металлического колпачка 30, навинченного (или закрепленного иным способом) на верхний торец штока 15. Электрическая связь с измерительным усилителем 35 может быть осуществлена через проводник, например, с закреплённым на нём контактным лепестком 29, соединением лепестка с колпачком 30 штока, соединённого с нижним держателем 34. Связь с подвижным элементом 26 ДП 18 может быть осуществлена, например, закреплением его между частями штока винтом, подвижный элемент 26 может быть вклеен в шток или встроен в шток каким либо иным способом (например нанесением кольцеобразной металлизации на сам шток).
Магнитная система 19 может быть выполнена на основе высокоэффективного неодимового постоянного магнита (могут быть использованы магниты из других материалов, другой формы и электромагниты). Катушка 24 выполнена жестко связанной со штоком 15 и вместе с ним подвешена на двух мембранах 16 и 17 для обеспечения высокой гибкости подвеса в направлении движения (по вертикали) и предотвращения возможных смещений и наклонов в поперечном направлении. Такая конструкция обеспечивает необходимую точность размещения обмотки 25 катушки 24 в зазоре между полюсными наконечниками 22 и 23 (в котором сформировано радиально направленное постоянное магнитное поле) магнитной системы 19 и обеспечивает практическое отсутствие потерь силы на ответвление в подвес и, соответственно, высокую точность передачи формируемых сил к испытуемому образцу 12. При взаимодействии электрического тока, протекающего через обмотку 25, с постоянным магнитным полем в зазоре между полюсными наконечниками 22 и 23 магнитной системы 19 по закону Ампера возникает сила, направленная перпендикулярно к направлению магнитного поля и тока в катушке, и выталкивающая катушку из зазора вверх или вниз от среднего положения, в зависимости от направления тока.
Ток через обмотку 25 катушки 24 обеспечивается усилителем тока катушки 51, который преобразует небольшой ток поступающий на его вход от сумматора токов 50, суммирующего токи ЦАП0 41 и ЦАП1 42, через коммутатор 43, в ток, достаточный для питания катушки 24 ЭДП 14. Работа усилителя тока катушки 51, в режиме генератора тока обеспечивает независимость создаваемой ЭДП 14 силы от изменения сопротивления обмотки 25 его катушки 24 за счет ее разогрева при работе и изменения температуры окружающей среды. Усилитель тока катушки 51, сопряжен с датчиком тока (ДТ) 52, выходное напряжение которого пропорционально току через обмотку 25 катушки 24 используется для измерения посредством АЦП2 40 через буфер 53 и для контроля внешними средствами измерений (СИ) при поверке. Гнездо для контроля тока внешними СИ 55 подключено к выходу датчика тока 52 через нормализатор 54.
Усилитель измерительный 35 преобразует сигнал с испытуемого образца 12 во всех режимах измерения параметров и передает его через буфер АЦП0 36 на вход аналого-цифрового преобразователя АЦП0 37 для дальнейшей обработки. Усилитель измерительный 35 выполнен по схеме преобразователя заряда в напряжение (зарядового усилителя). Усилитель измерительный 35 оснащен средствами управления коэффициентом передачи для обеспечения большого динамического диапазона измерений. Усилитель измерительный 35 может переводиться в рабочий режим только на время, необходимое для проведения измерения. В остальное время входная цепь усилителя измерительного 35 может иметь низкое сопротивление постоянному току, что обеспечивает, перед измерением, разряд статического заряда, накопленного на исследуемом образце 12 (например за счет пироэффекта). Кроме того, в состав усилителя измерительного 35 могут быть включены цепи формирования сигнала для измерения емкости (C) и тангенса угла потерь (tgδ). Управление режимами работы усилителя измерительного 35 осуществляется программным модулем управления микроконтроллера 38 блока управления 2 через группу цифровых входов/выходов 44.
Система питания 56 это электронное устройство, входом подключающееся к электрической сети 220 В переменного тока, обеспечивающее на своих выходах несколько стабилизированных напряжений постоянного тока для питания всех узлов блока 2 (на фиг.1 связи не показаны). В качестве системы питания может быть использовано устройство, включающее, например, три источника питания: двуполярный силовой нестабилизированный источник для питания усилителя тока катушки 51, двуполярный стабилизированный источник для питания аналоговых узлов обработки измерительных сигналов и однополярный стабилизированный источник, питающий все цифровые цепи и цепи индикации. В качестве системы питания может быть использован также универсальный многоканальный лабораторный блок питания или одновременно несколько стандартных блоков.
Отличием предлагаемого устройства явяляется использование датчика положения бесконтактного (ДП) 18 в системе, связывающей испытуемый образец с блоком управления 2 и преобразователем электрического тока в силу электродинамическим (ЭДП) 14 (включающим магнитную систему 19), позволяющее обеспечить точность размещения обмотки 25 катушки 24 в зазоре между полюсными наконечниками 22 и 23 магнитной системы 19, что значительно снижает влияние нелинейности преобразования тока в силу и обеспечивает практическое отсутствие потерь силы на ответвление в подвес и, соответственно, высокую точность передачи формируемых сил к испытуемому образцу 12, что приводит к возможности проведения измерений без сравнения последних с эталонными показателями тестового образца.
На фиг. 1, 1а и 1б приведена схема конкретного устройства, где 1-узел механического нагружения, 2-блок управления, 3-основание (предназначено для установки на нем всех прочих элементов конструкции и обеспечения, тем самым, единства, прочности и необходимой жесткости устройства в целом), 4-амортизирующие ножки основания, 5-стойка (жестко закреплена на основании 3 перпендикулярно к нему, обеспечивая возможность перемещения по ней привода механического 6 в направлении перпендикулярном основанию 3), 6 - привод механический, 7 - генератор механической силы, 8 - измерительная позиция, 9 - каретка, 10 - рукоятка привода механического, 11 - фиксатор, 12 - испытуемый механоэлектрический преобразователь (образец), 13 - корпус генератора механической силы (установленный на основании 3), 14 - преобразователь электрического тока в силу электродинамический (ЭДП) (закреплен на корпусе 13), 15 - шток, 16 - мембрана нижняя, 17 - мембрана верхняя, 18 - датчик положения бесконтактный, 19 - магнитная система, 20 - магнитопровод, 21 - магнит, 22 - полюсный наконечник магнита, 23 - полюсный наконечник магнита, 24 - катушка, 25 - обмотка катушки, 26 - подвижная часть датчика положения, 7 - шайба, 28 - винт, 29 - лепесток контактный, 30 - колпачёк резьбовой, 31 - неподвижная часть датчика положения, 32 - сменный верхний держатель (столик) измерительной позиции, 33 - общий провод, 34 - сменный нижний держатель (столик) измерительной позиции, 35 - усилитель измерительный, 36 - буфер аналого-цифрового преобразователя № 0 (буфер АЦП0), 37 - АЦП0 (аналого-цифровой преобразователь № 0), 38 - микроконтроллер с программой, 39 - АЦП1 (аналого-цифровой преобразователь № 1), 40 - АЦП2 (аналого-цифровой преобразователь № 2), 41 - ЦАП0 (цифро-аналоговый преобразователь № 0), 42 - ЦАП1 (цифро-аналоговый преобразователь № 1), 43 - коммутатор ЦАП1, 44 - группа цифровых входов/выходов, 45 - терминал, 46 - рычаг управления, 47 - нормализатор датчика положения, 48 - буфер АЦП1, 49 - контрольное гнездо датчика положения, 50 - сумматор токов ЦАП0 и ЦАП1, 51 - усилитель тока катушки, 52 - датчик тока, 53 - буфер АЦП2, 54 - нормализатор датчика тока катушки, 55 - контрольное гнездо датчика тока катушки, 56 - система питания.
Технический результат (в части возможности получения результатов измерений коэффициента преобразования по заряду D без сравнения с показателями механоэлектрических преобразователей с известным коэффициентом преобразования) достигается также тем, что способ измерения коэффициента преобразования по заряду механоэлектрического преобразователя с емкостным выходом, характеризуется тем, что испытуемый образец, упирающийся в верхний держатель 32, подвергают воздействию перепада силы заданной величины, определяемой выбранными значениями сил нагружения, создаваемых воздействием на него катушки ЭДП 24 через вертикально расположенный шток 15 с нижним держателем 34 в вышеописанном устройстве, измеряют заряд, выработывемый испытуемым образцом за счет пьезоэффекта, и рассчитывают результат измерения как отношение амплитуды заряда к амплитуде перепада силы по формуле D = ΔQ / ΔF, где ΔF –амплитуда перепада силы, ΔQ = Q2 – Q1, где Q1 остаточный заряд перед воздействием перепада силы, Q2 – заряд после перепада силы.
Величина перепада силы выбирается достаточной для достижения минимального влияния внешних помех, создаваемых, в том числе, вибрацией и электромагнитными полями, присутствующими в месте размещения устройства. Значение статической силы нагружения выбирается большим, чем значение перепада с некоторым запасом, так чтобы не допустить нарушения механической и электрической связи образца 12 с держателями (столиками) 32 и 34.
Отличием предлагаемого способа является отсутствие необходимости использования показаний тестового образца, поскольку точность передачи силы к образцу, а следовательно и точность измерения, обеспечивается расположением катушки строго в одном положении (устраняющим потери силы на преодоление упругости мембран подвеса и предотвращающее влияние нелинейности преобразования тока в силу, возникающей при перемещении катушки ЭДП в неидеально равномерном магнитном поле), контролируемом датчиком положения бесконтактным, а именно, в зазоре между полюсными наконечниками, и движением штока строго в вертикальном направлении. При этом обеспечивается возможность калибровки и поверки создаваемых сил эталонами массы (гирями).
Технический результат (в части возможности получения результатов измерений коэффициента преобразования по заряду D без сравнения с показателями механоэлектрических преобразователей с известным коэффициентом преобразования) достигается также тем, что способ измерения коэффициента преобразования по заряду механоэлектрического преобразователя с емкостным выходом, характеризуется тем, что испытуемый образец, упирающийся в верхний держатель 32 подвергают воздействию переменной силы синусоидальной формы, с частотой ниже его собственной резонансной частоты амплитудой F~, и сжимающей образец статической силы, достаточной, чтобы не допустить нарушения механической и электрической связи образца 12 с держателями 32 и 34, которые создаются воздействием на него катушки ЭДП 24 через вертикально расположенный шток 15 с нижним держателем 34 в вышеописанном устройстве, а вырабатывемый испытуемым образцом за счет пьезоэффекта заряд подвергают синхронной фильтрации, усреднению, определению амплитуды заряда (Q~) и рассчитывают результат измерения по формуле D = Q~/F~.
Частота переменной силы синусоидальной формы испытуемого образца выбирается значительно ниже его собственной резонансной частоты, предпочтительно не менее, чем на порядок, и достаточной для достижения минимального влияния внешних помех, создаваемых, в том числе, вибрацией и электромагнитными полями, присутствующими в месте размещения устройства.
Отличием предлагаемого способа также является отсутствие необходимости использования показаний тестового образца, в виду точности измерения, обеспечиваемом расположением катушки строго в одном положении и движением штока строго в вертикальном направлении.
Устройство работает следующим образом.
Измерение массы образца
Измерение массы проводится компенсационным методом. Измеряется сила тока, протекающего через обмотку (25) катушки (24) после достижения компенсации внешней нагрузки на шток (15), осуществляемой механической силой, создаваемой электродинамическим преобразователем электрического тока в силу (ЭДП). измеренное значение тока, за вычетом его начального значения, соответствующего исходному положению штока 15 (при котором выходное напряжение датчика положения 18 равно нулю, что обеспечивается при размещении подвижной части 26 датчика положения 18 напротив середины по вертикали его неподвижной части 31) при отсутствии внешней нагрузки на него, пропорционально внешней нагрузке (массе исытуемого образца).
1. Измерение начального значения силы тока, соответствующего исходному положению штока при отсутствии нагрузки, создаваемой испытуемым образцом (используется для повышения точности измерения массы образца).
В исходном состоянии устройства, перед подачей электропитания, при неустановленном испытуемом механоэлектрическим преобразователем 12, фиксатор 11 освобожден, привод механический 6 поднят рукояткой 10 так, чтобы между верхним и нижним держателями (столиками) 32 и 34 образовался зазор, достаточный для свободной установки образца 12. После подачи питания устройства от электросети система питания 56 формирует и подает питание на все узлы блока управления 2. В результате устанавливаются электрические режимы работы всех узлов и запускается программа, записанная в памяти микроконтроллера 38, при этом программа запускает автоматический регулятор положения штока 15 (далее «регулятор»), в работе которого участвует цепь, состоящая из узла механического нагружения 1, включающего в том числе генератор механической силы (7) со штоком (15), с преобразователем электрического тока в силу электродинамическим (ЭДП) (14), включающим магнитную систему 19 катушку 24 с намотанной на неё обмоткой 25, и с датчиком положения бесконтактным (18), включающим подвижную (26) и неподвижную (31) его части, а также из элементов блока управления 2, включающего микроконтроллер с программой 38, нормализатор датчика положения 47, АЦП1 (39), АЦП2 (40), буфер АЦП1 (48), буфер АЦП2 (53), ЦАП0 (41), ЦАП1 (42), коммутатор ЦАП1 (43), сумматор 50, усилитель тока катушки 51, датчик тока 52, нормализатор датчика тока катушки 54 группу цифровых входов/выходов 44 и терминал 45, при этом загружаются начальные значения цифровых кодов в ЦАП0 (41) и ЦАП1 (42), которые создают на своих выходах токи , значения которых соответствуют загруженным кодам. Выходной ток ЦАП0 (41) поступает на первый вход сумматора токов 50 непосредственно, а выходной ток ЦАП1 (42) поступает на второй вход сумматора токов 50 через коммутатор ЦАП1 (43), направленный программой в сторону сумматора токов (50). Сумма токов ЦАП0 (41) и ЦАП1 (42) с выхода сумматора токов 50 поступает на вход усилителя тока катушки 51, который усиливает этот ток и подает его в обмотку 25 катушки 24. Ток, протекающий через обмотку 25 возвращается через первый выход датчика тока 52 в усилитель тока катушки 51, а напряжение, в которое преобразован ток и пропорциональное этому току, через второй его выход поступает через буфер АЦП2 (53) на вход АЦП2 (40), который измеряет его и преобразует в цифровой код для контроля программой. Кроме того, это же напряжение через нормализатор датчика тока катушки 54 подается на контрольное гнездо датчика тока катушки 55 для контроля внешними приборами при поверке. Электромагнитное взаимодействие тока через катушку 24 с постоянным магнитным полем, создаваемым магнитной системой 19 в зазоре между полюсными наконечниками 22 и 23 приводит к появлению силы, приложенной к катушке 24 в направлении вверх или вниз, в соответствии с положительным или отрицательным направлением тока через нее. Эта сила способна вызывать перемещение катушки 24 и всех, жестко связанных с ней узлов. Одновременно датчик положения бесконтактный 18, вырабатывает на своем выходе напряжение, значение и полярность которого, пропорционально размеру и направлению смещения своей подвижной части 26, связанной со штоком, относительно неподвижной части, связанной с основанием 3 через элементы конструкции. Это напряжение через нормализатор 47 и буфер 48 поступает на вход АЦП1 (39), а также, через второй выход нормализатора датчика положения 47, на контрольное гнездо датчика положения 49 для подключения внешних приборов при поверке. АЦП1 (39) измеряет это напряжение, преобразует в цифровой код и передает программе регулятора которая сравнивает этот код (фактически положение штока) с нулевым значением и, после обработки, корректирует коды ЦАП0 (41) и ЦАП1 (42), в соответствии с которыми изменяется ток через обмотку 25 катушки 24 таким образом чтобы установить шток в начальное положение. По завершению процесса установки штока в исходное положение, начальное значение тока, соответствующее ему при отсутствии внешней нагрузки на шток, запоминается в памяти микроконтроллера 38 и затем будет использовано при взвешивании, одновременно через группу цифровых входов/выходов 44 микроконтроллер 38 выводит на экран терминала 45 значение массы равное нулю. «Регулятор» продолжает работать и устройство готово к работе.
2. Измерение массы образца
При установке измеряемого образца 12 на нижний держатель (столик) 34 появляется сила равная весу образца, приложенная к столику, штоку 15, подвижной части 26 датчика положения 18, катушке 24 и всем связанным с ними узлам, подвешенным на мембранах 16 и 17.
Датчик положения 18, при перемещении штока 15 вместе с его подвижной частью 26 (под воздействием веса испытуемого механоэлектрического преобразователя 12), вырабатывает на выходе неподвижной части 31, соединенной со входом АЦП1 (39) через нормализатор датчика положения 47 и буфер АЦП1 (48), напряжение, соответствующее значению и направлению отклонения штока 15 от исходного начального положения. АЦП1 (39) измеряет это напряжение, а часть регулятора, состоящая из микроконтроллера с программой 38, ЦАП0 (41), ЦАП1 (42), коммутатора ЦАП1 (43), сумматора токов ЦАП0 и ЦАП1 (50) и усилителя тока катушки 51, изменяет ток через обмотку 25 катушки 24 генератора механической силы 7, компенсируя смещение штока под действием нижнего держателя силой электромагнитного взаимодействия катушки с током и постоянного магнитного поля, таким образом, чтобы вернуть шток в исходное положение, что с высокой точностью контролируется регулятором по достижению минимального напряжения на выходе датчика положения 18. По окончании процесса устанавливается ток через катушку 24 равный алгебраической сумме начального тока и тока, потребовавшегося для компенсации веса измеряемого образца противодействующей силой созданной ЭДП 14.
При этом разность между установившимся значением силы тока через катушку 24 и, значением начального тока, измеряемыми АЦП2 (40) через нормализатор датчика тока катушки (54) и буфер АЦП2 (53), пересчитывается микроконтроллером 38 в значение механической силы, действующей на нижний держатель и шток по формуле

F – механическая сила, действующая на нижний держатель (34), Н;
KF – коэффициент преобразования тока в силу генератором механической силы (7), Н/А;
ΔI – изменение тока через катушку (24), вызванное нагружением нижнего держателя (34) испытуемым образцом (разность между текущим и начальным значениями тока).
KF – коэффициент преобразования тока в силу генератором механической силы (7), Н/А определяется и устанавливается в устройство следующим образом:
Предварительно, при регулировке устройства, в память его микроконтроллера записывается ожидаемое значение коэффициента преобразования тока в силу генератором механической силы (KF’). На нижний столик устанавливается стандартная гиря массой m, которая весит P = m × g, [Н], где g – ускорение свободного падения, а «стандартная» означает, что она является средством измерения и срок её поверки не истек, и выполняется процедура взвешивания. В результате взвешивания получается значение массы m’, которое, как правило, отличается от действительной массы гири m.
Далее рассчитывается действительное значение KF по формуле

Полученным значением KF заменяется предварительно записанное в память.
Таким образом устанавливается связь создаваемых устройством сил с единицей измерения силы и KF используется в дальнейшем для расчета значений тока через катушку 24 при создании заданных значений силы, воздействующей на образец 12 при проведении измерения коэффициентов преобразования по заряду.
Поскольку направление возможного перемещения штока 15 совпадает с его осью симметрии, которая установлена вертикально, то измеренное значение силы совпадает с весом испытуемого механоэлектрического преобразователя 12. Полученное значение веса пересчитывается микроконтроллером 38 в значение массы, которое и выводится на экран терминала 45 через группу цифровых входов/выходов 44. Расчет проводится по формуле

m – масса испытуемого механоэлектрического преобразователя (12), кг;
g – ускорение свободного падения, равное 9,8 м/с2 с погрешностью 0,2%.
Такой способ взвешивания практически полностью исключает ошибки вызываемые нелинейностями гибкости подвеса.
Измерение коэффициента преобразования по заряду и полярности испытуемого образца статическим методом
Принцип измерения коэффициента преобразования этим методом заключается в приложении к испытуемому образцу (12) перепада силы известной величины, создаваемого перепадом тока через катушку, одновременного измерения заряда, выработанного им за счет пьезоэффекта и получении результата измерения расчетом отношения амплитуды заряда к амплитуде перепада силы.
Величина перепада силы выбирается предпочтительно достаточной для достижения минимального влияния внешних помех, создаваемых, в том числе, вибрацией и электромагнитными полями, присутствующими в месте размещения устройства. Значение статической силы нагружения выбирается большим, чем значение перепада с некоторым запасом, так чтобы не допустить нарушения механической и электрической связи образца 12 с держателями (столиками) 32 и 34.
Измерение проводится после завершения взвешивания, что определяется по факту отображения на экране терминала 45 результата в виде массы измеряемого образца. Режим измерения выбирается соответствующей кнопкой терминала 45, при этом в дополнение к узлам задействованным во взвешивании включается цепь состоящая из усилителя измерительного 35, буфера АЦП0 36 и АЦП0 37, а также рычаг управления 46 и части узла механического нагружения 1, включающие основание 3, стойку 5, привод механический 6, включающий каретку 9, рукоятку привода механического 10, фиксатор 11 и верхний держатель (столик) 32 с общим проводом 33. Микроконтроллер 38 запускает программу измерения коэффициента преобразования по заряду и полярности испытуемого образца статическим методом.
По команде нажатия (оператором) рычага управления 46, поступающей через терминал 45 и группу цифровых входов/выходов 44, программа записывает в память микроконтроллера 38 коды ЦАП0 41 и ЦАП1 42, соответствующие току через катушку 24 в результате взвешивания измеряемого образца, сохраняет этот ток, прекращает его регулирование и ожидает касания испытуемого образца верхним столиком 32.
При опускании каретки 9 привода механического 6 рукояткой 10 до прикосновения верхнего держателя 32 к верхнему электроду испытуемого механоэлектрического преобразователя 12, сигнал от датчика положения 18 через нормализатор датчика положения 47, буфер АЦП1 (48), АЦП1 (39), поступает на микроконтроллер 38, который через группу цифровых входов/выходов 44 отображает информацию об этом в виде специального символа на экране терминала 45. Появление символа сигнализирует оператору о необходимости фиксации привода механического 6 фиксатором 11, что приводит к обеспечению механической связи (упором) верхнего электрода испытуемого образца 12 с основанием 3 и магнитной системой 19 через верхний держатель (столик) 32, каретку 9, фиксатор 11 и стойку 5, а нижнего электрода испытуемого образца 12 с катушкой 24 через нижний держатель (столик) 34 колпачек 30, лепесток контактный 29 и шток 15 и электрической связи его со входом усилителя измерительного через держатель (столик) верхний 32, общий провод 33, держатель (столик) нижний 34, колпачек 30, лепесток контактный 29, а также возможность подачи команды на измерение отпусканием рычага управления 46. Эта процедура кроме того обеспечивает сохранение местоположения катушки 24 в зазоре магнитной системы 19 при измерениях испытуемых образцов различной высоты.
После отпускания рычага управления 46 программа плавно увеличивает силу нагружения до выбранного значения путем загрузки соответствующих кодов в ЦАП 0 (41) и ЦАП1 (42) и подачи, формируемых ими токов через сумматор 50, усилитель тока катушки 51 в обмотку 25 катушки 24, что приводит к плавному увеличению силы нагружения, возникающей между катушкой 24 и магнитной системой 19, создаваемой электромагнитным взаимодействием тока, протекающего через обмотку 25 катушки 24 с постоянным магнитным полем в зазоре магнитной системы 19 (сжимающей образец 12 между столиками 32 и 34, связанными с магнитной системой 19 и катушкой 24 соответственно) до установленного значения в дополнение к весу образца 12. После достижения установленного значения силы нагружения, остаточный заряд образца 12 (Q1) измеряется АЦП0 (37), усиленный усилителем измерительным 35 и переданный через буфер АЦП0 36. Далее сила нагружения скачком уменьшается на заданное значение (ΔF), меньшего ранее установленного (чтобы не допустить нарушения механической и электрической связи образца 12 со столиками 32 и 34), и измеряется новое значение и полярность заряда (Q2), выработанного образцом 12, после чего сила нагружения плавно снижается до исходного значения.
Микроконтроллер 38, рассчитывает ΔQ = Q2 – Q1, вычисляет коэффициент преобразования по заряду (D) по формуле
D = ΔQ / ΔF
и выводит его значение на экран терминала 45.
Одновременно по полярности заряда определяется и выводится на экран знак полярности испытуемого образца 12, соответствующий полярности генерируемого заряда на его верхнем электроде при сжатии.
Измерение коэффициента преобразования по заряду и полярности испытуемого образца квазистатическим методом
Принцип измерения коэффициента преобразования этим методом заключается в приложении к испытуемому образцу 12 переменной механической силы синусоидальной формы с частотой значительно ниже (не менее, чем на порядок) его собственной резонансной частоты амплитудой F~ (достаточной для достижения минимального влияния внешних помех, создаваемых, в том числе, вибрацией и электромагнитными полями, присутствующими в месте размещения устройства), измерении заряда, выработанного за счет пьезоэффекта в результате воздействия силы синусоидальной формы, и получении результата измерения расчетом отношения амплитуды заряда к амплитуде переменной силы.
Одновременно образец 12 подвергается воздействию одноосной статической нагрузки, которая необходима для обеспечения безотрывности механического и электрического контакта образца с держателями (столиками) 32 и 34.
Измерение проводится следующим образом.
Режим измерения выбирается соответствующей кнопкой терминала 45 и отображается символом на его экране. Предварительные операции проводятся также, как при измерении статическим методом, но, после плавного достижения установленного значения силы статического нагружения, добавляется переменная составляющая силы синусоидальной формы амплитудой F~ меньшей, чем статическая составляющая (обычно от 2 до 10 раз). Формирование этих сил осуществляется программой микроконтроллера 38, создавая ток в катушке 24 посредством узлов ЦАП0 (41) и ЦАП1 (42), коммутатора ЦАП1 (43), сумматора 50, усилителя тока катушки 51 и контролируется датчиком тока 52, буфером АЦП2 (53) и АЦП2 (40). Одновременно измерительный усилитель 35 переключается в активный режим и его выходное напряжение, пропорциональное заряду вырабатываемому измеряемым образцом 12, подается на вход АЦП0 (37) через буфер АЦП0 (36), оцифровывается и поступает для обработки программой микроконтроллера 38. Микроконтроллер проводит синхронную фильтрацию, усреднение, сравнение фазы заряда с фазой приложенной переменной силы и определение амплитуды заряда (Q~ ) и его полярности. Рассчитанное по формуле D = Q~ / F значение D, сопровождаемое знаком полярности, выводится на экран терминала 45. Знак полярности определяется по результату сравнения фазы заряда с фазой приложенной переменной силы.
Измерение квазистатическим методом обеспечивает более высокую точность чем статическим, так как оно проводится в течение нескольких периодов переменной составляющей силы с усреднением и качественной фильтрацией помех, наводящихся на испытуемый образца 12 и, соответственно, на вход измерительного усилителя 35. С целью повышения точности и расширения динамического диапазона измерения возможно разбиение всего диапазона на поддиапазоны. Это позволяет измерять параметры образцов с малыми значениями коэффициента преобразования, которыми обладают монокристаллические, высокотемпературные и иные низкочувствительные образцы.
Измерение электрической емкости и тангенса диэлектрических потерь образца
Измерение электрической ёмкости испытуемого образца (CПЭ) основано на измерении отношения падения напряжений на образцовой (Co) (значение емкости которой точно известно) и измеряемой емкости, включенных последовательно и протекании через них одного и того же общего тока. Значение ёмкости может быть рассчитано по формуле

C0 – ёмкость образцового конденсатора;
CПЭ –емкость, испытуемого образца;
U1 – падение напряжения на емкости C0;
U2 – падение напряжения на емкости CПЭ.
Реальная схема сконструирована так, что значение U2 поддерживается постоянным. Значение C0 тоже является константой. Поэтому существует постоянный коэффициент Kc равный отношению значения емкости образцового конденсатора (C0) к значению U2. Соответственно измерение ёмкости проводится согласно выражению:
CПЭ = U1 × Kc
Измерение тангенса угла потерь tgδ испытуемого образца 12 заключается в измерении ортогональных составляющих U1 и расчете по формуле:

где  – вещественная часть U1;
– вещественная часть U1;
 – мнимая часть U1.
– мнимая часть U1.
Измерение проводится после завершения взвешивания. Режим измерения выбирается соответствующей кнопкой терминала 45, отображается символами на его экране и запускает программу измерения емкости и тангенса угла потерь.
Предварительные операции подготовки к измерению емкости и тангенса угла потерь, состав используемых узлов и связи между ними такие же, как при измерении квазистатическим методом, кроме того, что выход ЦАП1 42 перенаправляется коммутатором ЦАП1 43 в сторону второго входа усилителя измерительного 35. После плавного достижения установленного значения силы статического нагружения (необходима для обеспечения надежного электрического контакта между электродами испытуемого образца и держателями), ЦАП1 (42) генерирует ток синусоидальной формы, получая соответствующую кодовую последовательность от программы, и через коммутатор ЦАП1 (43) этот ток поступает в цепь второго входа усилителя измерительного 35, который предварительно через группу цифровых входов/выходов переведен в режим измерения емкости, при котором емкость измеряемого образца 12, подключенного к первому входу усилителя 35 и емкость образцового конденсатора (Co), являющегося компонентом усилителя, включаются последовательно. В усилителе измерительном 35, ток со второго входа передается в последовательную цепь конденсаторов и его амплитуда автоматически регулируется таким образом, чтобы обеспечить известное стабильное значение U2 , при этом напряжение U1, выделившееся на конденсаторе Co, передается на его выход и через буфер АЦП0 (36) поступает на вход АЦП0 (37), который его оцифровывает передает программе. Программа проводит фильтрацию, детектирование, усреднение, вычисляет результат измерения емкости и передает его на экран терминала 45. Для расширения диапазона измерения емкости, он может быть разбит на поддиапазоны. Для повышения точности измерения емкости (особенно малых её значений) может быть измерена входная емкость усилителя измерительного 35 вместе с держателями.
Одновременно с вычислением результата измерения емкости, программа обрабатывает оцифрованный АЦП0 (37) сигнал с выделением его вещественной и мнимой частей, вычисляет результат измерения тангенса угла потерь и передает его на экран терминала 45. Программа может увеличивать точность измерения за счет усложнения расчета путем учета паразитных параметров конкретной конструкции устройства. В частности могут быть учтены паразитные емкости и сопротивления входных цепей устройства.
Измерение коэффициента преобразования по напряжению
Измерение коэффициента преобразования по напряжению в устройстве реализовано статическим и квазистатическим методами.
Измерение коэффициента преобразования по напряжению обоими методами выполняется расчетным способом. Расчет проводится микроконтроллером (38) под управлением программы по результатам измерения коэффициента преобразования по заряду и электрической ёмкости по формуле:

где G – коэффициент преобразования образца по напряжению;
CПЭ – электрическая ёмкость образца;
D - коэффициент преобразования образца по заряду.
Таким образом, предлагаемое устройство позволяет получить результаты измерений с использованием единиц измерения системы СИ без сравнения с показателями механоэлектрических преобразователей (например пьезоэлементов) с известным коэффициентом преобразования по заряду D (пьезомодулем) и позволяет измерять несколько технических характеристик механоэлектрических преобразователей одним устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
| МНОГОКАНАЛЬНЫЙ ИЗМЕРИТЕЛЬ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ | 2019 |
|
RU2709709C1 |
| УСТРОЙСТВО ВЛАГОМЕТРИИ ТЕХНОЛОГИЧЕСКИХ ЖИДКОСТЕЙ | 2019 |
|
RU2699241C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРЕЦИЗИОННЫМ НУЛЬ-ТЕРМОСТАТОМ | 2006 |
|
RU2352911C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2018 |
|
RU2686441C1 |
| МАССОВЫЙ РАСХОДОМЕР КОРИОЛИСА ДЛЯ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ | 2003 |
|
RU2285245C2 |
| Акустический способ измерения микротвердости | 1988 |
|
SU1744586A2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОЛЬШИХ ТОКОВ | 2014 |
|
RU2580410C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СОСТОЯНИЯ МОТОРИЗИРОВАННОЙ ЗАПОРНОЙ АРМАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2771227C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ И ФАЗОЧАСТОТНЫХ ХАРАКТЕРИСТИК ТОКОВЫХ ШУНТОВ | 2013 |
|
RU2528588C1 |
Группа изобретений относится к измерительной технике. Использование датчика положения бесконтактного в системе, связывающей испытуемый образец с блоком управления и преобразователем электрического тока в силу электродинамическим (ЭДП), включающим магнитную систему, позволяет обеспечить точность размещения обмотки катушки в зазоре между полюсными наконечниками магнитной системы, что значительно снижает влияние нелинейности преобразования тока в силу и обеспечивает практическое отсутствие потерь силы на ответвление в подвес и, соответственно, высокую точность передачи формируемых сил к испытуемому образцу, что приводит к возможности проведения измерений без сравнения последних с эталонными показателями тестового образца. 3 н. и 12 з.п. ф-лы, 3 ил.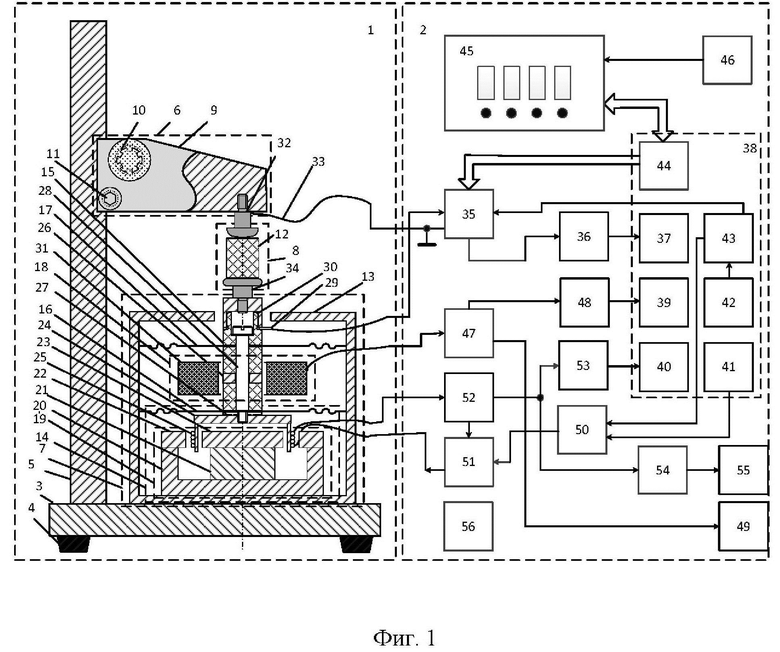
1. Устройство для измерения технических параметров механоэлектрических преобразователей с емкостным выходом, характеризующееся тем, что устройство включает узел механического нагружения (1) и узел блока управления, обработки сигналов и индикации (2);
при этом узел механического нагружения (1) включает привод механический (6), выполненный с возможностью вертикального перемещения, включает также измерительную позицию (8), включающую верхний держатель (32), связанный с приводом механическим и общим проводом (33), и нижний держатель (34), и при этом выполненную с возможностью размещения в ней испытуемого образца (12), оснащенного электродами, с возможной через его нижний электрод связью с нижним держателем и лепестком контактным (29), а через верхний электрод связью с её верхним держателем и с общим проводом; узел механического нагружения включает также генератор механической силы (7), включающий преобразователь электрического тока в силу электродинамический (ЭДП) (14), состоящий из магнитной системы (19), составленной из магнитопровода (20), магнита (21) и полюсных наконечников (22) и (23), и подвижной части, составленной из катушки (24) с намотанной на неё обмоткой (25), расположенной в зазоре между полюсными наконечниками, включающий также шток (15), подвешенный на двух мембранах (16) и (17) и связанный с катушкой (24) и с измерительной позицией (8) через её нижний держатель (34); генератор механической силы (7) включает также датчик положения бесконтактный (ДП) (18) со связанным со штоком (15) подвижным элементом (26), который связан без механического взаимодействия с неподвижным элементом (31), связанным, в свою очередь, с магнитопроводом (20) магнитной системы (19);
при этом узел блока управления, обработки сигналов и индикации (2) включает систему питания (56), связанную со всеми его узлами, усилитель измерительный (35), вход которого активным электродом соединён с нижним электродом испытуемого образца (12) через нижний держатель (34) и пассивным электродом соединён через верхний держатель (32) с нижним электродом испытуемого образца (12), и пассивным электродом соединён через верхний держатель (32) и общий провод (33) с верхним электродом испытуемого образца (12), а выход усилителя измерительного (35) через буфер аналого-цифрового преобразователя № 0 (буфер АЦП0) (36) связан со входом аналого-цифрового преобразователя № 0 (АЦП0) (37), являющегося составной частью микроконтроллера (38), который также содержит аналого-цифровой преобразователь №1 (АЦП1) (39), аналого-цифровой преобразователь № 2 (АЦП2) (40), цифро-аналоговый преобразователь № 0 (ЦАП0) (41), цифро-аналоговый преобразователь № 1 (ЦАП1) (42), коммутатор цифро-аналогового преобразователя № 1 /коммутатор ЦАП1/ (43), связанный своим выходом с усилителем измерительным (35), и группу цифровых входов/выходов (44), связанных своим выходом также с усилителем измерительным (35), а своим входом/выходом связанных с терминалом (45) и с рычагом управления (46);
узел блока управления (2) включает также нормализатор датчика положения (47), своим входом, связанный с неподвижной частью бесконтактного датчика положения (18), а выходом с буфером аналого-цифрового преобразователя №1 (буфером АЦП1) (48), связанным со входом АЦП1 (39), и, через второй выход, связанный с контрольным гнездом датчика положения (49);
узел блока управления (2) включает также датчик тока (52), который своим входом связан с обмоткой (25) катушки (24) ЭДП (14), а своим выходом через буфер аналого-цифрового преобразователя №2 (буфер АЦП2) (53) связан со входом АЦП2 (40), а через нормализатор датчика тока катушки (54) связан с контрольным гнездом датчика тока катушки (55); своим выходом датчик тока (52) также связан с усилителем тока катушки (51), связанным своим выходом с обмоткой (25) катушки (24) ЭДП (14), а своим входом через сумматор токов (50) связан с ЦАП0 (41) и коммутатором (43).
2. Устройство по п.1, характеризующееся тем, что механический привод (6) выполнен в виде приспособления, включающего каретку (9), связанную с верхним держателем (32) измерительной позиции (8), выполненную с возможностью перемещения её по стойке (5), закреплённой на основании (3), посредством рукоятки (10) с фиксацией в нужном положении фиксатором (11).
3. Устройство по п.2, характеризующееся тем, что держатели измерительной позиции (8) выполнены в виде столиков, при этом верхний столик (32) имеет резьбовое соединение с кареткой (9), а нижний столик (34) ввинчен в шток (15) генератора механической силы (7) через его колпачок (30).
4. Устройство по п.1 или 2, характеризующееся тем, что генератор механической силы установлен в отдельном корпусе (13).
5. Устройство по п.4, характеризующееся тем, что магнитопровод (20) магнитной системы (19) связан с неподвижным элементом (31) ДП (18) через корпус (13) устройства и связанное с ним основание (3) устройства.
6. Устройство по п.1, характеризующееся тем, что шток (15) связан с катушкой (24) через шайбу (27) винтом (28).
7. Устройство по п.1, характеризующееся тем, что шток (15) связан с подвижным элементом (26) датчика положения /ДП/ (18) закреплением его между частями штока.
8. Устройство по п.1, характеризующееся тем, что вход усилителя измерительного (35) активным электродом соединён с нижним электродом испытуемого образца (12) через нижний держатель (34) соединительным проводом с лепестком контактным (29), и через колпачок резьбовой (30) штока (15).
9. Устройство по п.1, характеризующееся тем, что подвижный элемент (26) датчика положения (ДП) (18) соединён с неподвижным элементом (31) датчика положения (ДП) (18) посредством электромагнитного поля высокой частоты.
10. Способ измерения коэффициента преобразования по заряду механоэлектрического преобразователя с емкостным выходом, характеризующийся тем, что испытуемый образец, упирающийся в верхний держатель (32), подвергают воздействию перепада силы заданной величины, определяемой выбранными значениями сил нагружения, создаваемых воздействием на него катушки ЭДП (24) через вертикально расположенный шток (15) с нижним держателем (34) в устройстве по п.1 формулы изобретения, измеряют заряд, вырабатывемый испытуемым образцом за счет пьезоэффекта, и рассчитывают результат измерения как отношение амплитуды заряда к амплитуде перепада силы по формуле D = ΔQ / ΔF, где ΔF – амплитуда перепада силы, ΔQ = Q2 – Q1, где Q1 остаточный заряд перед воздействием перепада силы, Q2 – заряд после перепада силы.
11. Способ по п.10, характеризующийся тем, что величину перепада силы выбирают достаточной для достижения минимального влияния внешних помех, создаваемых, в том числе, вибрацией и электромагнитными полями, присутствующими в месте размещения устройства.
12. Способ по п.10, характеризующийся тем, что значение силы нагружения выбирают большим, чем значение перепада, таким образом, чтобы не допустить нарушения механической и электрической связи образца (12) с держателями (32 и 34).
13. Способ измерения коэффициента преобразования по заряду механоэлектрического преобразователя с емкостным выходом, характеризующийся тем, что испытуемый образец, упирающийся в верхний держатель, подвергают воздействию переменной силы синусоидальной формы, с частотой ниже его собственной резонансной частоты амплитудой F~, и сжимающей образец статической силы, достаточной, чтобы не допустить нарушения механической и электрической связи образца (12) с держателями (32 и 34), которые создаются воздействием на него катушки ЭДП (24) через вертикально расположенный шток (15) с нижним держателем (34) в устройстве по п.1 формулы изобретения, а вырабатывемый испытуемым образцом за счет пьезоэффекта заряд подвергают синхронной фильтрации, усреднению, определению амплитуды заряда Q~ и рассчитывают результат измерения по формуле D = Q~/F~.
14. Способ по п.13, характеризующийся тем, частоту переменной силы синусоидальной формы испытуемого образца выбирают ниже его собственной резонансной частоты, не менее чем на порядок.
15. Способ по п.13, характеризующийся тем, амплитуду F~ выбирают достаточной для достижения минимального влияния внешних помех, создаваемых вибрацией и электромагнитными полями, присутствующими в месте размещения устройства.
| Устройство для измерения пьезомодуля | 1982 |
|
SU1205073A1 |
| Устройство аэродрома | 1925 |
|
SU2097A1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВЫСОКОТОЧНОГО ИЗМЕРЕНИЯ ФИЗИКО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 2007 |
|
RU2353925C1 |
| US 2008141783 A1, 19.06.2008. | |||
