Изобретение относится к радиолокации и рационавигации и может быть использовано для измерения угловых координат в системах со сверхсканированием.
Цель изобретения - повышение точности измерений.
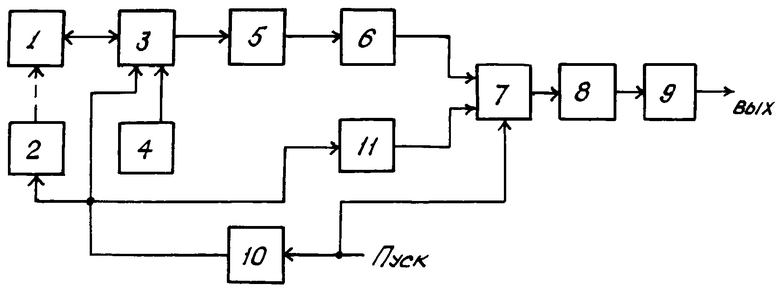
На чертеже представлено устройство, реализующее способ.
Устройство содержит: антенну 1, систему 2 управления антенной 2 (СУД), антенный переключатель 3 (АП), передатчик 4, приемник 5, блок формирования импульса окончания счета 6 (БФИОС), триггер 7, измеритель временного интервала 8 (ИВИ), микропроцессор 9, синхрогенератор 10, счетчик-делитель на 2 11.
Система, реализующая данный способ, работает следующим образом.
Пусковой импульс на пусковом входе устройства переводит триггер 7 в начальное состояние и запускает синхрогенератор 10. В начальном состоянии на выходе триггера 7 должен быть нулевой потенциал. По первому импульсу с синхрогенератора 10 АП 3 подключает выход передатчика 4 ко входу антенны 1, а СУА 2 при этом обеспечивает сканирование луча антенны 1 за время длительности импульса передатчика 4 в заданном секторе (θ1, θ1+ θобз) по закону θпр (t). Этот же первый импульс с выхода синхрогенератора 10 поступает на вход счетчика-делителя на 2 11. По окончанию действия импульса передатчика 4 СУА 2 переводит луч антенны 1 в начальное направление θ1. По второму импульсу синхрогенератора 10 АП 3 подключает выход антенны 1 ко входу приемника 5, а СУА обеспечивает сканирование луча антенны 1 за определенное время строба в секторе обзора (θ1, θ1+ θобз) по закону θпр (t). Этот же второй импульс синхрогенератора 10 поступает на вход счетчика-делителя на 2 11, на выходе которого появляется сигнал. Сигнал с выхода счетчика-делителя на 2 11 поступает на вход установки в единичное состояние триггера 7, в результате чего на выходе триггера 7 появится высокий потенциал, который подается на вход ИВИ 8, который начинает измерение. Отраженный от цели радиосигнал принимается антенной 1 и через АП 3 поступает на вход приемника 5. С выхода приемника 5 видеоимпульс поступает на вход УФИ ОС 6. УФИ ОС 6 формирует импульс, фронт которого соответствует времени спада видеоимпульса с выхода приемника 5. Этот импульс поступает на вход установки в нулевое состояние триггера 7, на выходе которого в результате этого появится нулевой потенциал. Нулевой потенциал с выхода триггера 7 поступает на вход ИВИ 8, что соответствует моменту окончания измерения.
Результат измерения с выхода ИВИ 8 поступает на вход микропроцессора 9, который вычисляет направление на цель θ = θ2- θ0, где θ2= θпр (t). θо - угол определяемый из уравнения Fp(θ)= k, Fp(θ) - диаграмма направленности по мощности, к ≅0,5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛА НАБЛЮДЕНИЯ ОБЪЕКТА | 1992 |
|
RU2037836C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В СИСТЕМАХ СО СВЕРХСКАНИРОВАНИЕМ | 1994 |
|
RU2093855C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1992 |
|
RU2101726C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ВНЕШНЕЙ КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА ВО ВНУТРЕННЮЮ ОБЛАСТЬ НАБЛЮДЕНИЯ | 1994 |
|
RU2129718C1 |
| Способ определения путевой скорости объекта | 1991 |
|
SU1807429A1 |
| Способ определения тангенциальной составляющей скорости объекта | 1991 |
|
SU1809400A1 |
| Способ определения радиальной скорости объекта | 1991 |
|
SU1809399A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ (ВАРИАНТЫ) | 2011 |
|
RU2476902C1 |
| Способ обнаружения наземных движущихся целей бортовой радиолокационной станцией | 2018 |
|
RU2691771C1 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1999 |
|
RU2172964C1 |
Сущность изобретения: способ измерения угловых координат позволяет повысить точность измерения благодаря учету закона быстрого сканирования и учета возможного местоположения цели в образующихся слоях видимости. 1 ил.
СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ, основанный на излучении импульсного сигнала в заданном угловом секторе θ1 , θ1 + θобз , где θ1 - начальное направление диаграммы направленности (ДН) антенны, θ1 + θобз - конечное направление (ДН) антенны, сканирование диаграммы направленности антенны в этом угловом секторе при приеме отраженного от объекта сигнала и фиксации угла θ2 , соответствующего моменту времени Δt с начала сканирования антенны до уменьшения амплитуды принимаемого сигнала до величины Uс, кратной максимальному значению Uc.max принятого сигнала с коэффициентом k ≅ 0,5, характеризующим пеленгационную чувствительность
θ2 = θпp(Δτ) ;
Uc = kUc.max ,
где θпp(Δτ) - закон сканирования диаграммы направленности антенны при приеме отраженного от объекта сигнала,
отличающийся тем, что, с целью повышения точности измерений, направление на объект измеряют по формуле
θ = θ2 - θ0 ,
где θ0 - угол, определяемый из уравнения
Fp(θ) = k
Fp(θ) - диаграмма направленности по мощности.
