Изобретение относится к радиолокационной технике и может быть использовано для точного определения координат объекта, например, при контроле за обстановкой в зоне аэродрома, при наблюдении за искусственными космическими объектами и т.п.
Известен способ моноимпульсного определения угловых координат, при котором расстановка парциальных лучей, а следовательно, и дискриминаторная (разностная) характеристика жестко зависят от конструкции антенны. Кроме того, используется только линейная часть дискриминаторной характеристики.
При усложнении требований к РЛС и переходе от зеркальных антенн к фазированным антенным решеткам (ФАР) возникает зависимость формы парциальных лучей от угла электронного отклонения, т.е. от заданного на антенну целеуказания.
Известен способ моноимпульсного определения угловых координат объекта в системе с ФАР, при котором совокупность делителей, фазовращателей и сумматоров представляет собой так называемую лучеобразующую матрицу, с выхода которой снимаются пять искомых парциальных сигналов моноимпульса, образованных из принятого сигнала. Далее из парциальных образуются сигналы рассогласования, по которым определяются угловые координаты по известной крутизне эталонной дискриминаторной характеристике (ЭДХ). В принципе матричные схемы можно рассматривать применительно как к элементам, так и к группам элементов (секциям).
Основной недостаток этого способа заключается в том, что взаимное расположение парциальных лучей и ориентация их связки в пространстве не регулируются в зависимости от целеуказания. Кроме того, никак не учитывается влияние текущих неисправностей собственно ФАР (отдельных элементов или секций) и других устройств пространственной обработки сигнала, не приводящих к полному отказу РЛС.
Аналоговая матрица может быть заменена цифровой, но при прямом функциональном "копировании" результат останется тем же.
Отмеченные недостатки ограничивают точность угловых измерений РЛС с ФАР.
Использование только линейной части дискриминаторной характеристики (ДХ) также ограничивает возможности РЛС.
Целью изобретения является повышение точности угловых измерений моноимпульсным методом, а также расширение рабочего участка ДХ применительно к РЛС с ФАР.
Это достигается тем, что для каждого произвольного целеуказания связку парциальных лучей формируют индивидуально, что позволяет каждый раз формировать ДХ оптимально, т.е. выбирать углы разделения и ориентацию плоскостей пеленгации в пространстве с учетом искажений за счет электронного сканирования, что является техническим результатом. Также индивидуально для каждого целеуказания рассчитывают ЭДХ с учетом текущих неисправностей. ЭДХ аппроксимируют кусочно-линейной зависимостью с расчетными опорными точками, что позволяет использовать не только линейный участок ДХ, но и прилегающие к нему монотонные участки.
Техническая реализация способа достигается за счет двухступенчатой схемы фазирования при использовании матрицы (цифровой или аналоговой) с управляемыми фазовыми сдвигами. Для определения направления каждого парциального луча используется специально введенная подвижная система координат. ЭДХ рассчитывается для двух плоскостей пеленгации на идеализированной имитационной математической модели с учетом текущих неисправностей.
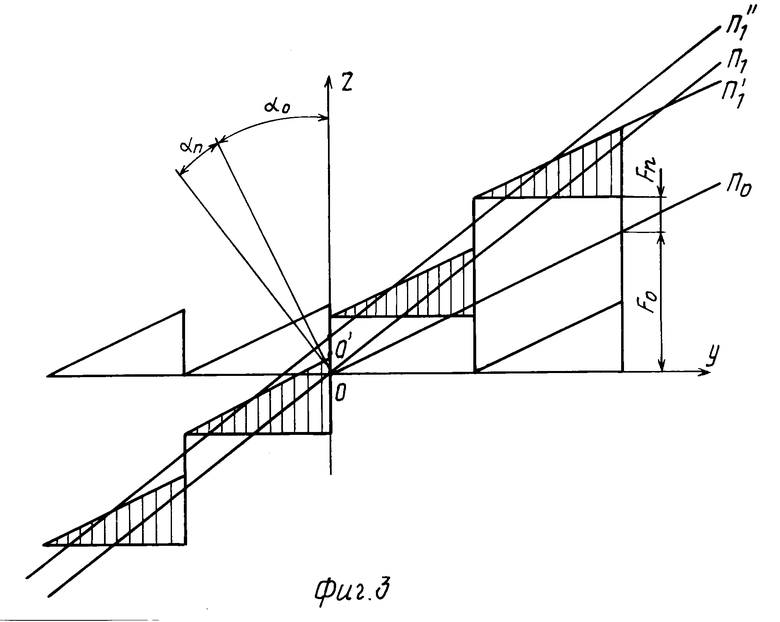
На фиг. 1 показана структурная схема аппаратуры РЛС, осуществляющей так называемую пространственную обработку приемного сигнала и определение угловых координат, где 1 N секций ФАР, 2 N элементов ФАР с управляющими фазами, 3 матрица, 4 суммарно-разностный преобразователь, 5 определитель углового положения объекта, 6 вычислитель фаз для элементов ФАР, 7 вычислитель фазовых подставок секций, 8 вычислитель ЭДХ; на фиг. 2, 3 схема двухступенчатого фазирования центрального и отклоненного луча соответственно.
Предложенный способ заключается в том, что принятый от объекта сигнал (см. фиг. 1) предварительно фазируют в элементах раскрыва 2, суммируют в пределах каждой секции 1 и преобразуют в матрице 3 в пять парциальных сигналов путем пятикратной весовой обработки n-мерного массива сигналов секций пятью независимыми n-мерными массивами фазовых подставок, определяющими индивидуальную независимость установки каждого из пяти парциальных лучей.
Таким образом, фазирование осуществляется как в элементах ФАР, так и в матрице.
Рассмотрим двухступенчатое фазирование более подробно (см. фиг. 2, 3) на примере линейки из четырех секций.
Для поворота луча на угол αo методом электронного сканирования необходимо сформировать наклонный по отношению к раскрыву фазовый фронт По (фиг. 2). Фазу каждого элемента в раскрыве можно представить в виде двух слагаемых: линейно меняющегося в пределах секций, но повторяющегося для всех секций ("пила") и постоянного в пределах секций, но скачкообразно меняющегося от одной секции к другой ("подставка").
Так как в пределах секции фаза для каждого элемента обычно рассчитывается (в вычислителе 6) путем последовательного прибавления постоянной величины ΔF 2πa/λ sin αo (где а/λ относительный шаг решетки), а подставка Fo в зависимости от координаты центра секции относительно центра ФАР, в раскрыве ФАР устанавливается фазовый фронт По1, параллельный заданному По, что не влияет на результирующую амплитудную диаграмму направленности (ДН).
Для получения смещенного на угол αп парциального луча необходимо сформировать фазовый фронт П1, для чего ввести фазовое слагаемое типа "подставка" Fп (см. фиг. 3). Как и в предыдущем случае, П1трансформируется в П11, но в отличие от По это изначально ломаная линия, а угол разворота αo+ αп определяется ее линейной составляющей П111. Смещение фазового центра ОО1 в обоих случаях одинаково, а следовательно, при прочих равных условиях фазовые центры парциальных лучей совпадают.
Если "пила" реализуется в фазовращателях секций, а суммарная подставка Fo + Fп в матрице (цифровой или аналоговой с управляемыми фазовыми сдвигами), имеем двухступенчатую схему фазирования в чистом виде, которая позволяет формировать парциальные лучи независимо друг от друга, как это и предлагается в заявке. В предельном случае, когда секция состоит из одного элемента, переходим в смысле фазирования к так называемой активной решетке.
Если "пила" и Fo реализуются в фазовращателях секций, а Fп в матрице с неуправляемыми фазовыми сдвигами, имеем одноступенчатую схему фазирования, где матрица только "размножает" лучи, но не управляет их относительным расположением в зависимости от заданного целеуказания (в нашем примере αo). Введение управляемых фазовращателей в матрицу, обрабатывающую только Fп, технически бессмысленно.
Расстановка парциальных лучей, сводящаяся к расчету пятимерных массивов фазовых весовых коэффициентов в вычислителе 7 (см. фиг. 1), производится в подвижной системе координат, что позволяет скорректировать угол разделения в зависимости от целеуказания и сохранить взаимную перпендикулярность плоскостей пеленгации в пространстве.
Суммарно-разностный преобразователь 4 трансформирует пять парциальных сигналов в два нормированных сигнала рассогласования, несущих информацию об отклонении объекта от целеуказания.
Вычислитель ЭДХ с учетом направлений парциальных лучей, рабочей частоты и текущих неисправностей, информация о которых поступает к нему от секций 1, рассчитывает заданное количество точек ЭДХ (5-7 точек для каждой плоскости пеленгации).
Этот прием позволяет максимально использовать монотонную часть дискриминаторной характеристики с учетом ее растяжения в зависимости от отклонения целеуказания от нормали к раскрыву ФАР.
Определение углового положения цели производят сравнением двух сигналов рассогласования с эталонными в предположении, что ЭДХ аппроксимируется двумя цилиндрами с линейной образующей и кусочно-линейными направляющими с расчетными опорными точками.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| СПОСОБ НАСТРОЙКИ УГЛОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2002 |
|
RU2208810C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| СПОСОБ ЮСТИРОВКИ ПО УГЛОВЫМ КООРДИНАТАМ ПОДВИЖНОГО РАДИОЛОКАТОРА | 1992 |
|
RU2030759C1 |

Использование: радиолокационная техника. Сущность изобретения: устройство, реализующее способ, содержит N секций фазированных антенных решеток (ФАР) 1, N элементов ФАР 2, матрицу 3, суммарно - разностный преобразователь 4, определитель 5 углового положения объектов, вычислитель 6 фаз для элементов ФАР, вычислитель 7 фазовых подставок секций, вычислитель 8 эталонных дискриминаторных характеристик 8, что позволяет за счет двухступенчатого фазирования при использовании матрицы с управляемыми фазовыми сдвигами повысить точность угловых измерений и расширить рабочий участок дискриминаторной характеристики применительно к радиолокационным станциям с ФАР. 3 ил.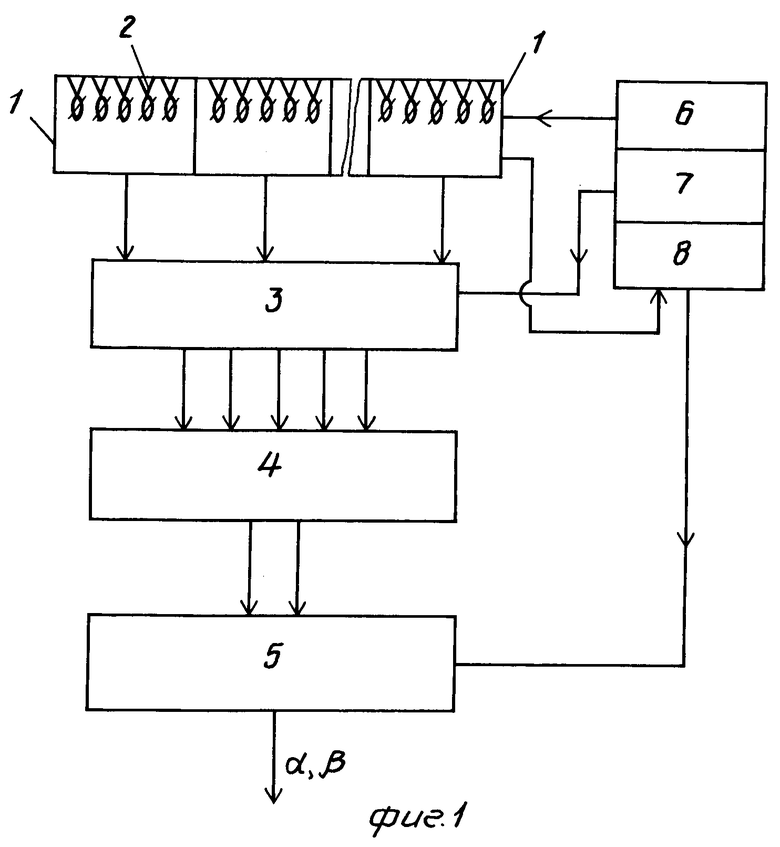
СПОСОБ МОНОИМПУЛЬСНОГО ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА, заключающийся в том, что принимают сигналы от объекта, преобразуют принятые сигналы в парциальные, определяемые расстановкой парциальных лучей относительно целеуказания, путем размножения каждого из принятых сигналов на составляющие, количество которых равно искомому числу парциальных лучей, в каждую составляющую принятого сигнала вводят фазовый сдвиг, суммируют одноименные составляющие принятого сигнала, при этом каждая сумма является парциальным сигналом, парциальные сигналы преобразуют в сигналы рассогласования, по которым определяют угловые координаты объекта, отличающийся тем, что величины фазовых сдвигов, формирующих парциальные составляющие, вводимых в каждую составляющую принятого сигнала, рассчитывают индивидуально и независимо одна от другой для каждого целеуказания с помощью подвижной системы координат, полярная ось которой совпадает с целеуказанием, а перед определением угловых координат цели формируют эталон дискриминаторной характеристики с теми же фазовыми сдвигами индивидуально для каждого целеуказания с учетом коррекции ошибок, вносимых неисправностями аппаратуры, аппроксимируют эталон дискриминаторной характеристики кусочно-линейной зависимостью с расчетными опорными точками, сравнивают сигналы рассогласования с эталоном дискриминаторной характеристики, по результатам сравнения определяют интервал на эталоне дискриминаторной характеристики между точками, соответствующий полученному сигналу рассогласования, определяют угловое отклонение от равносигнального направления объекта, считая, что зависимость дискриминаторной характеристики от угла внутри интервала линейна.
| Леонов А.И | |||
| и Фомичев К.И | |||
| Моноимпульсная радиолокация | |||
| М.: Сов.радио, 1970, с.72-83. |
