Изобретение относится к области систем автоматического регулирования (CAP) газотурбинного двигателя (ГТД).
Известна CAP ГТД, воздействующая на один регулирующий фактор, содержащая измерители выходных параметров, элементы сравнения и исполнительный механизм, причем сигнал с регулятора температуры газа непосредственно действует на настройку регулятора частоты вращения ротора ГТД [Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. М.: Машиностроение, 1983. - 283 с. С.108, рис.3.7].
Недостатком такой схемы является уменьшение запасов устойчивости, уменьшение допустимых коэффициентов усиления в канале управления и ухудшение динамической точности регулирования при совместной работе регуляторов.
Известна CAP ГТД, в которой содержатся измерители частоты вращения ротора ГТД и температуры газа, регуляторы этих параметров, селектор минимума, исполнительное устройство, воздействующее на расход топлива [Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. М.: Машиностроение, 1983. - 283 с. С.126, рис.3.26].
Эта CAP двухмерным объектом с одним управляющим воздействием, в которой используется алгебраический селектор. Первый канал этой CAP является каналом управления, определяющим режим работы объекта по выходной координате Y1, его заданная величина Y10 зависит от времени. Второй канал - канал ограничения, его заданная величина Y20 является постоянной и определяет максимальный режим работы объекта по координате Y2.
Эта CAP ГТД имеет невысокую динамическую точность и заброс по температуре при селектировании, что можно объяснить следующим образом.
ГТД имеет различные динамические характеристики по разным выходным параметрам управления относительно расхода топлива.
Для получения необходимого качества регулирования переключение селектора должно происходить в момент равенства рассогласований между текущими значениями параметров и уставками параметров [Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. М.: Машиностроение, 1983. - 283 с. С.110], то есть сигналов перед регуляторами. Из анализа видно, что регулятор температуры газа является инерционным по отношению к регулятору частоты вращения ротора ГТД, поэтому селектор переключается с запаздыванием. В результате происходит заброс по температуре газа.
Наиболее близкой по достигаемому техническому результату выбранной в качестве ближайшего аналога является CAP ГТД, содержащая каналы регулирования частоты вращения ротора ГТД и температуры газа, первый и второй элементы сравнения, селектор минимума, исполнительный механизм, ГТД, измерители частоты вращения ротора и температуры газа, задатчики частоты вращения ротора и температуры газа, корректирующее звено канала частоты вращения ротора, разностное корректирующее звено, запоминающее устройство, компаратор, дифференциатор, эталонную модель канала ограничения температуры газа, устройство самонастройки, суммирующее устройство [Патент РФ №2172857, МПК 7 F02С 9/28, 27.08.2001].
Передаточные функции объекта управления:
по координате Y1:

по координате Y2:
где K01, K02 - коэффициенты передачи;
А1(p), А2(p), В(p) - полиномы, зависящие от вида объекта.
Порядок А1(p) меньше, чем порядок В(p), а порядок А2(p) равен порядку В(p).
Такое математическое описание характерно, например, для динамических характеристик газотурбинного двигателя по частоте вращения ротора и температуре газа при изменении расхода топлива в камеру сгорания.
Передаточная функция исполнительного устройства такой системы имеет вид:

Корректирующее звено канала частоты вращения ротора включено постоянно, его передаточная функция

Корректирующее звено канала температуры газа с передаточной функцией
реализуется при включении канала температуры газа подключением Wк1(p) разностного корректирующего звена с передаточной функцией

по логическому сигналу L компаратора 16, где L=0 при работе канала управления и L=1 при работе канала ограничения. При этом Wм1(p) и Wм2(p) - передаточные функции моделей разомкнутых каналов соответственно управления и ограничения.
Таким образом, при селектировании происходит структурное изменение корректирующего звена системы, которое приводит к появлению импульсного сигнального возмущения CAP выходным сигналом разностного корректирующего звена, зависящим от динамических характеристик объекта управления.
Это вызывает скачок по температуре газа или режим обратного переключения каналов, что существенно ухудшает качество работы канала ограничения. Следовательно, необходима компенсация динамической погрешности CAP в момент селектирования.
Компенсация динамической погрешности CAP достигается использованием эталонной модели канала ограничения температуры газа, компенсацией сигнального возмущения постоянным сигналом при включении корректирующего звена канала температуры газа и последующим устранением влияния постоянного сигнала при работе канала ограничения выходным сигналом контура сигнальной самонастройки, который компенсирует постоянный сигнал. Формирование постоянного сигнала осуществляется с помощью запоминающего устройства в момент селектирования, определяемый с помощью компаратора и дифференциатора. Таким образом, без сигнальной самонастройки в системе возникает статическая ошибка [Патент РФ №2172857, МПК 7 F02С 9/28, 27.08.2001, фиг.2, а].
Недостатком такой схемы является то, что эта задача решается достаточно сложно.
Задачей, на решение которой направлено заявляемое изобретение, является обеспечение астатизма системы по возмущению и тем самым улучшение динамических характеристик CAP путем устранения заброса температуры, скачков по температуре и зоны совместной работы каналов, что приводит к повышению ресурса ГТД и упрощению структуры CAP.
Поставленная задача решается тем, что система автоматического регулирования газотурбинного двигателя, содержащая последовательно соединенные измеритель частоты вращения ротора, первый элемент сравнения и алгебраический селектор минимума, последовательно соединенные корректирующее звено канала частоты вращения ротора и суммирующее устройство, последовательно соединенные разностное корректирующее звено и ключ, причем выход ключа соединен со вторым входом суммирующего устройства, последовательно соединенные газотурбинный двигатель, измеритель температуры газа, второй элемент сравнения, компаратор, дифференциатор и запоминающее устройство, причем второй выход газотурбинного двигателя соединен с измерителем частоты вращения ротора, выход второго элемента сравнения соединен со вторым входом алгебраического селектора минимума, второй вход компаратора подключен к выходу первого элемента сравнения, а выход соединен со вторым входом ключа, выход разностного корректирующего звена соединен со вторым входом запоминающего устройства, выход запоминающего устройства подключен к третьему входу суммирующего устройства, ко второму входу первого элемента сравнения подключен задатчик частоты вращения ротора, а ко второму входу второго элемента сравнения подключен задатчик температуры газа, в отличие от прототипа дополнительно содержит электронный изодромный регулятор и статическое исполнительное устройство, причем вход электронного изодромного регулятора соединен с выходом алгебраического селектора минимума, а его выход соединен со входом корректирующего звена канала частоты вращения ротора и со входом разностного корректирующего звена, вход статического исполнительного устройства соединен с выходом суммирующего устройства, а выход подключен ко входу газотурбинного двигателя.
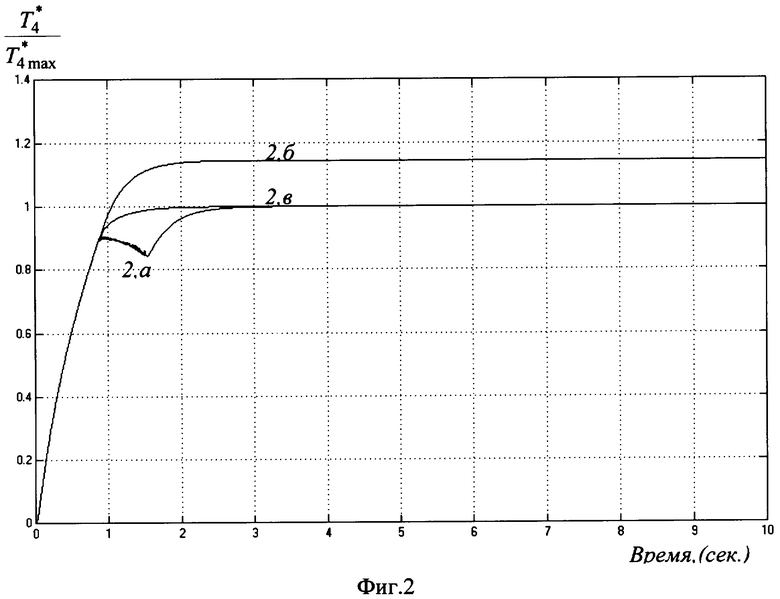
Сущность системы поясняется чертежами. На фиг.1 изображена структурная схема системы автоматического регулирования газотурбинного двигателя, на фиг.2 изображены результаты моделирования переходных процессов при селектировании, причем:
на фиг.2, а - переходной процесс в системе при отсутствии компенсации, при котором возникает скользящий режим работы;
на фиг.2, б - переходной процесс с компенсацией постоянным сигналом на выходе запоминающего устройства в прототипе без контура самонастройки;
на фиг.2, в - переходной процесс в заявляемой системе.
Система автоматического регулирования газотурбинного двигателя содержит последовательно соединенные измеритель частоты вращения ротора 1, первый элемент сравнения 2 и алгебраический селектор минимума 3, последовательно соединенные корректирующее звено канала частоты вращения ротора 4 и суммирующее устройство 5, последовательно соединенные разностное корректирующее звено 6 и ключ 7, причем выход ключа 7 соединен со вторым входом суммирующего устройства 5, последовательно соединенные газотурбинный двигатель 8, измеритель температуры газа 9, второй элемент сравнения 10, компаратор 11, дифференциатор 12 и запоминающее устройство 13, причем второй выход газотурбинного двигателя 8 соединен с измерителем частоты вращения ротора 1, выход второго элемента сравнения 10 соединен со вторым входом алгебраического селектора минимума 3, второй вход компаратора 11 подключен к выходу первого элемента сравнения 2, а выход соединен со вторым входом ключа 7, выход разностного корректирующего звена 6 соединен со вторым входом запоминающего устройства 13, выход запоминающего устройства 13 подключен к третьему входу суммирующего устройства 5, ко второму входу первого элемента сравнения 2 подключен задатчик частоты вращения ротора 14, а ко второму входу второго элемента сравнения 10 подключен задатчик температуры газа 15, вход электронного изодромного регулятора 16 соединен с выходом алгебраического селектора минимума 3, а его выход соединен со входом корректирующего звена канала частоты вращения ротора 4 и со входом разностного корректирующего звена 6, вход статического исполнительного устройства 17 соединен с выходом суммирующего устройства 5, а выход подключен ко входу газотурбинного двигателя 8.
CAP работает следующим образом: в канале частоты вращения ротора ГТД сигнал с измерителя частоты вращения 1, пропорциональный частоте вращения, поступает на первое сравнивающее устройство 2, где сравнивается с заданным значением задатчика частоты вращения ротора 14 и формируется выходной сигнал рассогласования, пропорциональный отклонению частоты вращения ротора ГТД от заданного значения. Этот сигнал поступает на первый вход алгебраического селектора минимума 3. Выходной сигнал с алгебраического селектора минимума 3 поступает на вход электронного изодромного регулятора 16. Сигнал с электронного изодромного регулятора 16 идет на корректирующее устройство канала частоты вращения 4 и на разностное корректирующее звено 6. Сигнал с корректирующего устройства канала частоты вращения 4 идет на первый вход суммирующего устройства 5, а сигнал с разностного корректирующего звена 6 идет на первый вход ключа 7. Выход ключа 7 подключен к третьему входу суммирующего устройства 5.
В канале температуры газа за турбиной ГТД сигнал с измерителя температуры газа 9, пропорциональный среднему значению температуры газа за турбиной ГТД, поступает на вход второго сравнивающего устройства 10, где сравнивается с заданным значением температуры газа задатчика температуры газа 15 и формируется сигнал рассогласования, пропорциональный отклонению температуры газа от заданного значения. Этот сигнал поступает на второй вход алгебраического селектора минимума 3.
Одновременно сигналы рассогласования с первого сравнивающего устройства 2 и со второго сравнивающего устройства 10 поступают на компаратор 11. Выходной сигнал с компаратора 11 через дифференциатор 12, который определяет момент селектирования, поступает на первый вход устройства запоминания 13, второй вход которого соединен с выходом разностного корректирующего звена 6. Постоянный компенсирующий сигнал с выхода устройства запоминания 13, амплитуда которого равна величине импульсного возмущения, идет на второй вход суммирующего устройства 5. В результате на вход сумматора подается постоянный ступенчатый сигнал. Выход суммирующего устройства подключен к статическому исполнительному устройству 17, управляющему расходом топлива ГТД.
Сумматор 5 складывает три пришедших сигнала, формируя тем самым сигнал коррекции управляющего воздействия. Этот сигнал ограничивает управляющее воздействие с выхода газотурбинного двигателя 8 и таким образом обеспечивает компенсацию динамической погрешности CAP при включении корректирующего звена Wк2(p). Переходные процессы при этом имеют монотонный характер.
Статическая зависимость выходной величины от постоянного компенсирующего сигнала обычно является нежелательной, поскольку создает погрешность управления.
Поэтому статическую погрешность CAP необходимо ликвидировать [Юревич Е.И. Теория автоматического управления. - Л.: Энергия, 1975. - 416 с. С.73].
Статическое отклонение выходной координаты в CAP при действии постоянного компенсирующего сигнала, который получается после запоминающего устройства F, определяется следующим соотношением

При наличии возмущения F статическое отклонение выходной координаты будет отсутствовать, если при р=0 выражение передаточной функции замкнутой системы по возмущению  обратится в нуль.
обратится в нуль.
Принципиально это возможно, если передаточная функция разомкнутой системы W(0)=∞.
Равенство W(0)=∞ реализуется введением в САУ вне участка  интегрирующего звена, то есть переходом к астатической CAP по возмущению. Таким образом, условием устранения статического отклонения Y2ст от постоянного компенсирующего сигнала F является наличие интегрирующего звена в системе вне участка, описываемого передаточной функцией
интегрирующего звена, то есть переходом к астатической CAP по возмущению. Таким образом, условием устранения статического отклонения Y2ст от постоянного компенсирующего сигнала F является наличие интегрирующего звена в системе вне участка, описываемого передаточной функцией  .
.
При введении в статическую CAP интегрирующего звена вне участка системы от места приложения F до выходного сигнала Y2 статическое отклонение Y2ст будет равно нулю из-за наличия в знаменателе W(p) множителя p от передаточной функции  интегрирующего звена, а
интегрирующего звена, а  .
.
Следовательно, CAP приобретает астатические свойства по возмущению благодаря наличию электронного изодромного регулятора 16, содержащего интегрирующее звено.
Передаточная функция изодромного регулятора:
Тогда передаточная функция замкнутой системы, связывающая выходную величину и возмущение:
где Wир(p) - передаточная функция изодромного регулятора,
WF(p) - передаточная функция разомкнутой системы, связывающая выходную величину и возмущение.
В установившемся режиме при t→∞ и p→0  .
.
Получаем уравнение системы:
Y2=Y20+0·F,
где Y2 - выходная величина,
Y20 - заданное значение выходной величины;
F - возмущение.
То есть статическая погрешность от возмущения равна нулю.
Итак, заявляемое изобретение позволяет осуществлять управление выходными величинами по двум каналам: каналу температуры газа и каналу частоты вращения ротора. Благодаря включению в CAP электронного изодромного регулятора сразу после алгебраического селектора и до перестраиваемого корректирующего звена система приобретает астатизм по отношению к структурному возмущению. Вследствие чего в системе не наблюдается заброса по температуре в момент селектирования, скачков по температуре и зоны совместной работы каналов, то есть переходной процесс имеет монотонный характер, что отличает ее от ближайших аналогов и позволяет существенно повысить ресурс ГТД.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2319026C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2412366C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2446298C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2332580C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2418964C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2010 |
|
RU2446299C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2221929C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2409751C2 |
Использование: в системах автоматического регулирования (CAP) газотурбинных двигателей (ГТД). Технический результат: повышение динамической точности регулирования при селектировании путем устранения заброса температуры, скачков по температуре и зоны совместной работы каналов. Сущность изобретения: CAP ГТД содержит последовательно соединенные измеритель частоты вращения ротора, первый элемент сравнения и алгебраический селектор минимума, последовательно соединенные корректирующее звено канала частоты вращения ротора и суммирующее устройство, последовательно соединенные разностное корректирующее звено и ключ, причем выход ключа соединен со вторым входом суммирующего устройства, последовательно соединенные газотурбинный двигатель, измеритель температуры газа, второй элемент сравнения, компаратор, дифференциатор и запоминающее устройство, причем второй выход газотурбинного двигателя соединен с измерителем частоты вращения ротора, выход второго элемента сравнения соединен со вторым входом алгебраического селектора минимума, второй вход компаратора подключен к выходу первого элемента сравнения, а выход соединен со вторым входом ключа, выход разностного корректирующего звена соединен со вторым входом запоминающего устройства, выход запоминающего устройства подключен к третьему входу суммирующего устройства, ко второму входу первого элемента сравнения подключен задатчик частоты вращения ротора, а ко второму входу второго элемента сравнения подключен задатчик температуры газа. Система дополнительно содержит электронный изодромный регулятор и статическое исполнительное устройство, причем вход электронного изодромного регулятора соединен с выходом алгебраического селектора минимума, а его выход соединен со входом корректирующего звена канала частоты вращения ротора и со входом разностного корректирующего звена, вход статического исполнительного устройства соединен с выходом суммирующего устройства, а выход подключен ко входу газотурбинного двигателя. 2 ил.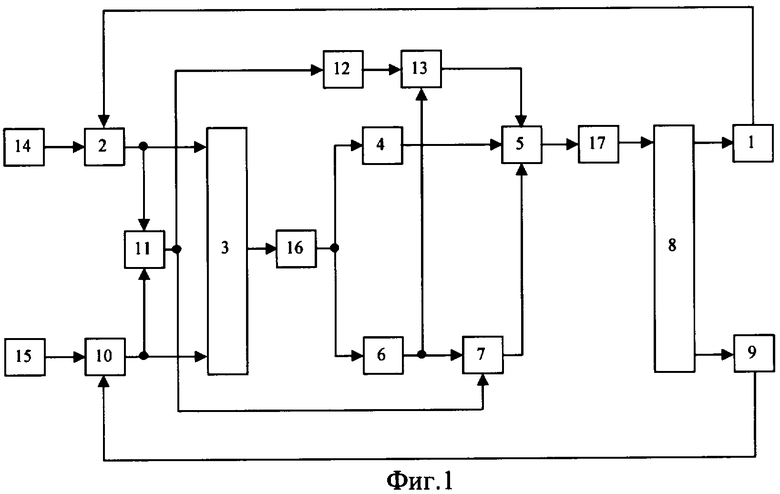
Система автоматического регулирования газотурбинного двигателя, содержащая последовательно соединенные измеритель частоты вращения ротора, первый элемент сравнения и алгебраический селектор минимума, последовательно соединенные корректирующее звено канала частоты вращения ротора и суммирующее устройство, последовательно соединенные разностное корректирующее звено и ключ, причем выход ключа соединен со вторым входом суммирующего устройства, последовательно соединенные газотурбинный двигатель, измеритель температуры газа, второй элемент сравнения, компаратор, дифференциатор и запоминающее устройство, причем второй выход газотурбинного двигателя соединен с измерителем частоты вращения ротора, выход второго элемента сравнения соединен со вторым входом алгебраического селектора минимума, второй вход компаратора подключен к выходу первого элемента сравнения, а выход соединен со вторым входом ключа, выход разностного корректирующего звена соединен со вторым входом запоминающего устройства, выход запоминающего устройства подключен к третьему входу суммирующего устройства, ко второму входу первого элемента сравнения подключен задатчик частоты вращения ротора, а ко второму входу второго элемента сравнения подключен задатчик температуры газа, отличающаяся тем, что дополнительно содержит электронный изодромный регулятор и статическое исполнительное устройство, причем вход электронного изодромного регулятора соединен с выходом алгебраического селектора минимума, а его выход соединен со входом корректирующего звена канала частоты вращения ротора и со входом разностного корректирующего звена, вход статического исполнительного устройства соединен с выходом суммирующего устройства, а выход подключен ко входу газотурбинного двигателя.
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| Интегральные системы автоматического управления силовыми установками самолетов | |||
| Под ред | |||
| ШЕВЯКОВА А.А | |||
| - М.: Машиностроение, 1983, с.108, рис.3.7 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2001 |
|
RU2204044C2 |
| Ножевой прибор в валичной чесальной машине | 1925 |
|
SU3008A1 |
| Пулемет с затвором, управляемым кривошипным механизмом | 1925 |
|
SU2416A1 |
| ПО Г-СО ЮЗ НА Я | 0 |
|
SU306064A1 |
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |

