Изобретение относится к области систем автоматического управления (САУ) газотурбинного двигателя (ГТД).
Известна САУ ГТД, в которой для устранения отрицательного влияния взаимодействия регуляторов на характеристики системы управления с одним регулирующим фактором содержатся измерители частоты вращения ротора ГТД и температуры газа, регуляторы этих параметров, селектор минимального сигнала, исполнительное устройство, воздействующее на расход топлива [1].
Недостатком этой схемы является то, что взаимодействие каналов управления сохраняется на переходных режимах. Эта САУ ГТД имеет невысокую динамическую точность и заброс по температуре при селектировании, что можно объяснить следующим образом.
ГТД имеет различные динамические характеристики по разным выходным координатам объекта управления относительно расхода топлива.
Рассмотрим САУ ГТД как двухмерный объект с одним управляющим воздействием, в котором используется алгебраический селектор минимального сигнала. Первый канал этой САУ является каналом управления, определяющим режим работы объекта по выходной координате Y1, его заданная величина Y10 зависит от времени. Второй канал - канал ограничения, его заданная величина Y20 является постоянной и определяет максимальный режим работы объекта по координате Y2.
Передаточные функции объекта управления:
по координате Y1:

по координате Y2:

где p - оператор преобразования Лапласа;
K1, K2 - коэффициенты передачи;
A1(p), A2(p), B(p) - полиномы, зависящие от вида объекта.
Примем, что порядок A1(p) меньше, чем порядок В(р), а порядок A2(p) равен порядку В(p). Такое математическое описание характерно, например, для динамических характеристик ГТД по частоте вращения ротора и температуре газа при изменении расхода топлива в камеру сгорания.
Передаточная функция общего изодромного регулятора

Передаточные функции регулятора первого - W1(p) и второго - W2(p) каналов выбираются исходя из заданных требований к динамическим характеристикам каждого из них. Это можно сделать следующим образом. Потребуем, чтобы передаточные функции отдельных разомкнутых каналов без учета запаздывания измерителей координат удовлетворяли равенствам:


где Wм1(p) и Wм2(p) - передаточные функции эталонных моделей
разомкнутых каналов. Тогда


Если передаточные функции отдельных разомкнутых каналов выбрать в виде

то для получения необходимого качества регулирования выходных координат регуляторы, согласно (6) и (7), должны иметь, например, следующие передаточные функции:


При этом инерционность датчика температуры должна быть скорректирована так, чтобы измерители параметров были безынерционными.
Как известно [2], обычно применяется принцип селектирования, согласно которому регулируется параметр ГТД, наиболее приблизившийся к величине, определяемой программой регулирования. Следовательно, для получения необходимого качества регулирования переключение селектора должно происходить в момент равенства рассогласований между текущими значениями выходных координат и их задающими значениями, т.е. в момент равенства сигналов перед регуляторами

Проведенный анализ показывает, что регулятор температуры газа является инерционным по отношению к регулятору частоты вращения ротора ГТД, поэтому селектор переключается с канала частоты вращения ротора на канал температуры газа с запаздыванием. В результате происходит заброс по температуре газа.
Наиболее близкой по достигаемому техническому результату, выбранной за ближайший аналог, является САУ ГТД, содержащая каналы регулирования частоты вращения ротора и температуры газа, селектор минимального сигнала, исполнительное устройство, два корректирующих звена, два суммирующих элемента, логическое устройство (компаратор) и ключ [3].
В этой САУ за счет включения двух перекрестных корректирующих звеньев с передаточными функциями


происходит изменение задающего воздействия разомкнутого канала ограничения температуры газа и выполнение условия

при переключении САУ на канал ограничения температуры газа при равенстве сигналов на входах селектора минимального сигнала

Это позволяет получить необходимое качество переходного процесса по температуре газа при включении этого канала.
Недостатком такой САУ является то, что при обратном переключении с канала температуры газа на канал частоты вращения ротора структура, параметры корректирующих звеньев и место включения корректирующего сигнала должны изменяться, т.е. эта система не является адаптивной к изменению ее структуры при селектировании каналов и не обеспечивает в этом случае заданного качества переходных процессов.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение динамических характеристик САУ путем устранения забросов и обеспечения заданного качества переходных процессов по выходным координатам ГТД при прямом и обратном включении селектором различных каналов системы, что приводит к улучшению качества системы управления и к повышению ресурса работы двигателя.
Решение поставленной задачи достигается тем, что в систему автоматического управления газотурбинного двигателя, содержащую последовательно соединенные регулятор частоты вращения ротора, селектор минимального сигнала, изодромный регулятор, газотурбинный двигатель, измеритель частоты вращения ротора и первый элемент сравнения, задатчик частоты вращения ротора, выход которого подключен к второму входу первого элемента сравнения, последовательно соединенные измеритель температуры газа, второй элемент сравнения, первый суммирующий элемент, регулятор температуры газа и логическое устройство, задатчик температуры газа, выход которого подключен к второму входу второго элемента сравнения, причем выход регулятора частоты вращения ротора соединен со вторым входом логического устройства, выход регулятора температуры газа соединен со вторым входом селектора минимального сигнала, а второй выход газотурбинного двигателя соединен с входом измерителя температуры газа, в отличие от прототипа дополнительно введены последовательно соединенные селектор максимального сигнала, третий элемент сравнения, блок согласования, переключатель и второй суммирующий элемент, причем первый и второй входы селектора максимального сигнала соединены соответственно с первым и вторым входами селектора минимального сигнала, выход которого соединен со вторым входом третьего элемента сравнения, выход первого элемента сравнения соединен со вторым входом второго суммирующего элемента, выход которого подключен к входу регулятора частоты вращения ротора, выход логического устройства соединен со вторым входом переключателя, второй выход которого подключен к второму входу первого суммирующего элемента.
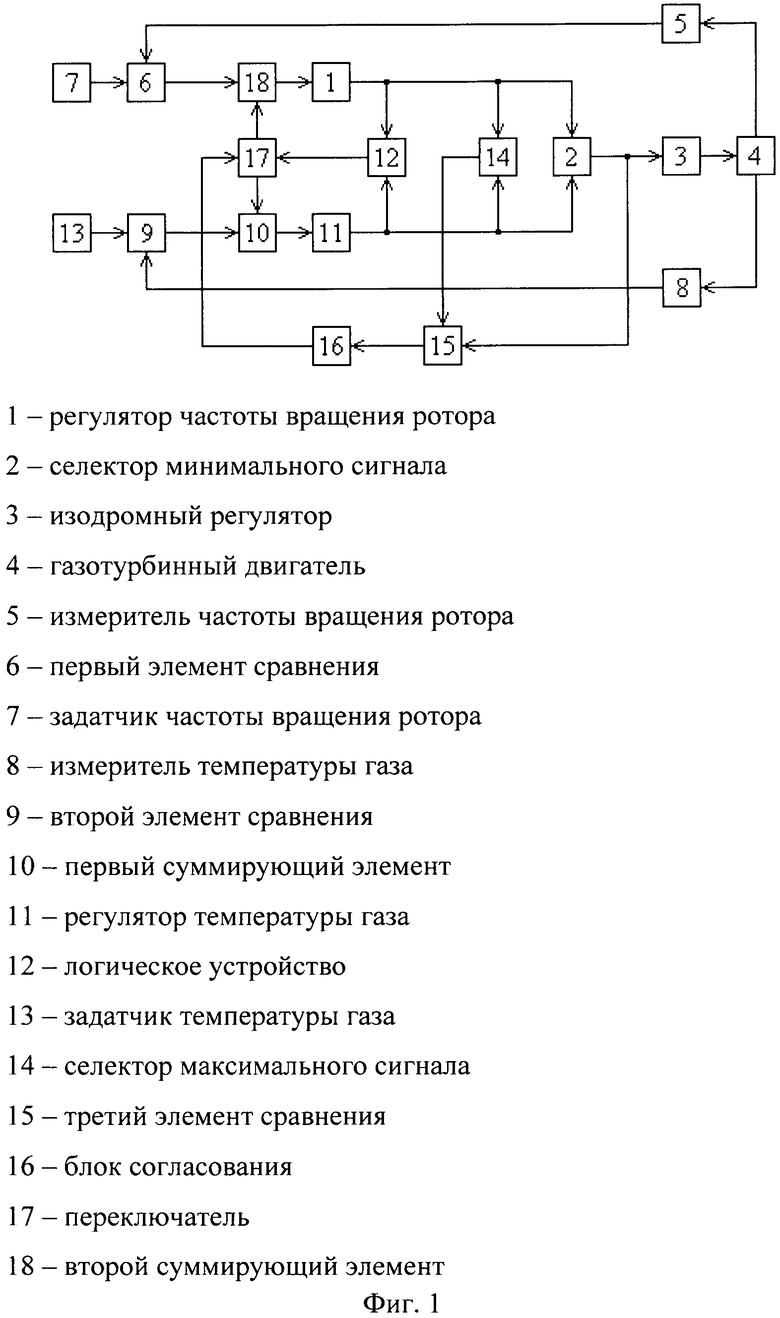
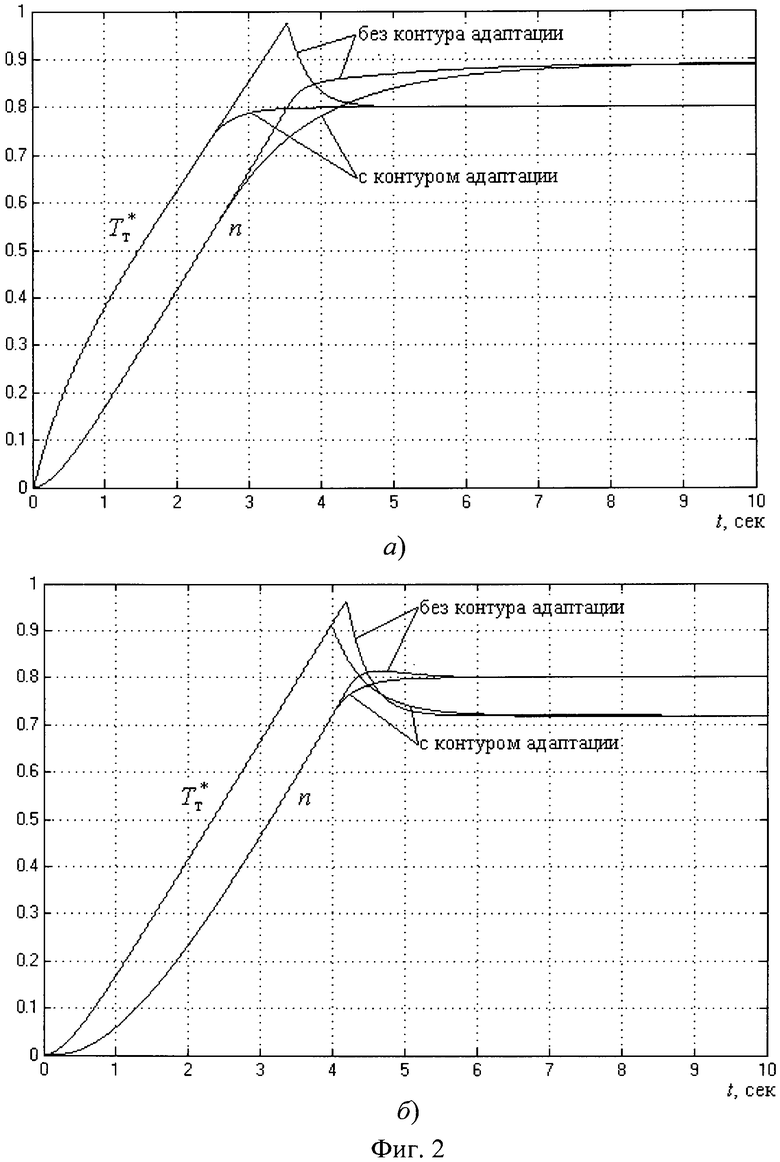
Существо системы поясняется чертежами. На фиг.1 представлена блок-схема системы автоматического управления газотурбинного двигателя; на фиг.2 - результаты моделирования переходных процессов в САУ ГТД при различных переключениях каналов селектором минимального сигнала:
а) с канала частоты вращения ротора на канал температуры газа, б) с канала температуры газа на канал частоты вращения ротора, с контуром и без контура адаптации, при этом выходные координаты ГТД представлены в относительном виде

Система автоматического управления газотурбинного двигателя содержит последовательно соединенные регулятор частоты вращения ротора 1, селектор минимального сигнала 2, изодромный регулятор 3, газотурбинный двигатель 4, измеритель частоты вращения ротора 5 и первый элемент сравнения 6, задатчик частоты вращения ротора 7, выход которого подключен к второму входу первого элемента сравнения 6, последовательно соединенные измеритель температуры газа 8, второй элемент сравнения 9, первый суммирующий элемент 10, регулятор температуры газа 11 и логическое устройство 12, задатчик температуры газа 13, выход которого подключен к второму входу второго элемента сравнения 9, причем выход регулятора частоты вращения ротора 1 соединен со вторым входом логического устройства 12, выход регулятора температуры газа 11 соединен со вторым входом селектора минимального сигнала 2, а второй выход газотурбинного двигателя 4 соединен с входом измерителя температуры газа 8, при этом система дополнительно содержит последовательно соединенные селектор максимального сигнала 14, третий элемент сравнения 15, блок согласования 16, переключатель 17 и второй суммирующий элемент 18, причем первый и второй входы селектора максимального сигнала 14 соединены соответственно с первым и вторым входами селектора минимального сигнала 2, выход которого соединен со вторым входом третьего элемента сравнения 15, выход первого элемента сравнения 6 соединен со вторым входом второго суммирующего элемента 18, выход которого подключен к входу регулятора частоты вращения ротора 1, выход логического устройства 12 соединен со вторым входом переключателя 17, второй выход которого подключен к второму входу первого суммирующего элемента 10.
Система автоматического управления газотурбинного двигателя работает следующим образом.
В канале регулирования частоты вращения ротора ГТД 4 сигнал с измерителя частоты вращения ротора 5, пропорциональный частоте вращения ротора, поступает на первый элемент сравнения 6, где сравнивается с выходным сигналом задатчика частоты вращения ротора 7 и формируется выходной сигнал рассогласования E1, пропорциональный отклонению частоты вращения ротора от заданного значения. Этот сигнал через второй суммирующий элемент 18 поступает на вход регулятора частоты вращения ротора 1, выход которого U1 подключен к первому входу селектора минимального сигнала 2.
В канале регулирования температуры газа ГТД 4 сигнал с измерителя температуры газа 8, пропорциональный температуре газа, поступает на второй элемент сравнения 9, где сравнивается с выходным сигналом задатчика температуры газа 7 и формируется выходной сигнал рассогласования E2, пропорциональный отклонению температуры газа от заданного значения. Этот сигнал через первый суммирующий элемент 10 поступает на вход регулятора температуры газа 11, выход которого U2 подключен к второму входу селектора минимального сигнала 2.
На выход селектора минимального сигнала 2 проходит выходной сигнал

того канала регулирования, который в данный момент по условиям работы ГТД требует меньшего расхода топлива. Сигнал с селектора минимального сигнала 2 через изодромный регулятор 3, который выполняет функцию и исполнительного устройства, изменяет расход топлива в камеру сгорания газотурбинного двигателя 4.
Выходные сигналы регулятора частоты вращения ротора 1 U1 и регулятора температуры газа 11 U2 поступают на входы селектора максимального сигнала 14, на выходе которого формируется сигнал

На выходе третьего элемента сравнения 15 определяется разность сигналов на выходе регуляторов

где Uзам - выходной сигнал регулятора замкнутого канала;
Uраз - выходной сигнал регулятора разомкнутого канала.
Выходные сигналы U1 и U2 поступают также на вход логического устройства 12, на выходе которого формируется логический сигнал L, определяющий замкнутый канал САУ

Выходной сигнал ε третьего элемента сравнения 15 через блок согласования 16 и переключатель 17 поступает на вход соответствующего регулятора разомкнутого канала с помощью первого 10 или второго 18 суммирующего элемента, что определяется состоянием переключателя 17 в соответствии с логическим сигналом L логического устройства 12. Так как ε меньше нуля, то этот сигнал уменьшает задающее воздействие разомкнутого канала и тем самым корректирует момент переключения каналов.
Как было отмечено выше, регуляторы частоты вращения ротора 1 и температуры газа 11 имеют разные динамические характеристики, в результате чего условие переключения селектора минимального сигнала 2

отличается от необходимого эталонного условия переключения САУ - равенства рассогласований между текущими значениями выходных координат и их задающими воздействиями

Следовательно, необходимо согласование этих условий. Как известно [4], согласование поведения отдельных каналов САУ возможно за счет контура управления их относительным движением. В данном случае оно обеспечивается за счет введения контура сигнальной самонастройки по разности сигналов ε на выходе регуляторов с воздействием на задающее воздействие разомкнутого канала системы. Это позволяет построить САУ ГТД, адаптивную к изменению ее структуры при переключении каналов селектором.
Пусть замкнутым является канал регулирования частоты вращения ротора, т.е. первый канал. Тогда выход контура сигнальной самонастройки включен с помощью первого суммирующего элемента 10 на вход регулятора температуры газа 11 второго разомкнутого канала.
Сигнал на выходе регулятора частоты вращения ротора

Сигнал на выходе регулятора температуры газа

где Wc(p) - передаточная функция блока согласования 16.
Тогда разность сигналов на выходе регуляторов

При Wc(p), равном K, и K, достаточно большом, получаем
ε→0; U2→U1,
или

где m - достаточно малая величина.
Таким образом, за счет работы контура сигнальной самонастройки момент переключения селектора минимального сигнала 2

приближается к условию переключения каналов по ошибкам каналов

Это, соответственно, позволяет ликвидировать заброс и обеспечить необходимое качество переходного процесса при замыкании и включении в работу регулятора температуры газа 11. При U1, равном U2, происходит переключение каналов, и далее при U1, большем по сравнению с U2, - изменение состояния каналов: первый канал становится разомкнутым, а второй канал - замкнутым. Это приводит к изменению также и структуры контура самонастройки.
Аналогичные процессы характерны для САУ и при переключении селектора с замкнутого канала температуры газа на канал частоты вращения ротора. В этом случае выходной сигнал контура самонастройки включается с помощью переключателя 17 и второго суммирующего элемента 18 на вход регулятора частоты вращения ротора 1, изменяя задающее воздействие первого канала.
Так как порядок знаменателей передаточных функций отдельных регуляторов W1(p) и W2(p) двухвального ГТД не выше двух, то контур самонастройки обеспечивает хорошее качество переходных процессов при достаточно высоких значениях коэффициента передачи K.
Результаты моделирования рассмотренной САУ ГТД, приведенные на фиг.2, при задающих воздействиях каналов

и выполнении условия (8) показывают, что при прямом и обратном переключении каналов селектором качество переходных процессов включаемого канала существенно улучшается при введении контура самонастройки. САУ сохраняет заданное качество при изменении структуры, т.е. является адаптивной.
Итак, заявляемое изобретение позволяет осуществить адаптивное управление различными выходными координатами ГТД с помощью селектора каналов и контура сигнальной самонастройки. Устраняются забросы выходных координат двигателя, обеспечивается заданное качество переходных процессов включаемого канала системы, что способствует повышению ресурса ГТД.
Источники литературы
1. Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. - М.: Машиностроение, 1983. - 283 с., стр.126, рис.3.26.
2. Интегральные системы автоматического управления силовыми установками самолетов. / Под ред. А.А.Шевякова. - М.: Машиностроение, 1983. - 283 с., стр.110.
3. Свидетельство РФ №2416 на полезную модель. МПК 6 F02C 9/28. Система автоматического регулирования газотурбинного двигателя. / В.И.Петунин, А.И.Фрид, В.В.Васильев, Ф.А.Шаймарданов. Заявка №95108046; заявл. 18.05.95; опубл. 16.07.96; Бюл. №7.
4. Мирошник И.В. Согласованное управление многоканальными системами. - Л.: Энергоатомиздат, 1990. - 128 с., стр.21, рис.1.8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МНОГОМЕРНЫМ ОБЪЕКТОМ | 2010 |
|
RU2446299C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2319026C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2221929C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2332580C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2418964C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2412366C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490492C1 |
Использование: в системах автоматического управления (САУ) газотурбинных двигателей (ГТД). Технический результат: адаптивное управление различными выходными координатами ГТД с помощью селектора каналов и контура сигнальной самонастройки, в результате чего устраняются забросы выходных координат двигателя, обеспечивается заданное качество переходных процессов включаемого канала САУ, что способствует повышению ресурса ГТД. Система дополнительно содержит последовательно соединенные селектор максимального сигнала, третий элемент сравнения, блок согласования, переключатель и второй суммирующий элемент, причем первый и второй входы селектора максимального сигнала соединены соответственно с первым и вторым входами селектора минимального сигнала, выход которого соединен со вторым входом третьего элемента сравнения, выход первого элемента сравнения соединен со вторым входом второго суммирующего элемента, выход которого подключен к входу регулятора частоты вращения ротора, выход логического устройства соединен со вторым входом переключателя, второй выход которого подключен к второму входу первого суммирующего элемента. 2 ил.
Система автоматического управления газотурбинного двигателя, содержащая последовательно соединенные регулятор частоты вращения ротора, селектор минимального сигнала, изодромный регулятор, газотурбинный двигатель, измеритель частоты вращения ротора и первый элемент сравнения, задатчик частоты вращения ротора, выход которого подключен ко второму входу первого элемента сравнения, последовательно соединенные измеритель температуры газа, второй элемент сравнения, первый суммирующий элемент, регулятор температуры газа и логическое устройство, задатчик температуры газа, выход которого подключен ко второму входу второго элемента сравнения, причем выход регулятора частоты вращения ротора соединен со вторым входом логического устройства, выход регулятора температуры газа соединен со вторым входом селектора минимального сигнала, а второй выход газотурбинного двигателя соединен с входом измерителя температуры газа, отличающаяся тем, что дополнительно содержит последовательно соединенные селектор максимального сигнала, третий элемент сравнения, блок согласования, переключатель и второй суммирующий элемент, причем первый и второй входы селектора максимального сигнала соединены соответственно с первым и вторым входами селектора минимального сигнала, выход которого соединен со вторым входом третьего элемента сравнения, выход первого элемента сравнения соединен со вторым входом второго суммирующего элемента, выход которого подключен к входу регулятора частоты вращения ротора, выход логического устройства соединен со вторым входом переключателя, второй выход которого подключен ко второму входу первого суммирующего элемента.
| Пулемет с затвором, управляемым кривошипным механизмом | 1925 |
|
SU2416A1 |
| Ножевой прибор в валичной чесальной машине | 1925 |
|
SU3008A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ п-МЕРИОГО ОБЪЕКТА С ОДНИМ РЕГУЛИРУЮЩИМ ВОЗДЕЙСТВИЕМ | 0 |
|
SU377731A1 |
| Способ регулирования энергетической установки | 1989 |
|
SU1758260A1 |
| WO 9324991 A, 09.12.1993 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ВЫСОКОТЕМПЕРАТУРНЫХ НАГРЕВАТЕЛЕЙ НА ОСНОВЕ ДИСИЛИЦИДА МОЛИБДЕНА | 1999 |
|
RU2184169C2 |

