Изобретение относится к авиаприборостроению, а именно к системам автоматического регулирования (САР) газотурбинных двигателей (ГТД).
Наиболее близкой по технической сущности и достигаемому результату к заявленному является САР ГТД, в которой для повышения динамической точности регулирования при селектировании используется устранение заброса температуры, скачков по температуре и зоны совместной работы каналов. Система содержит последовательно соединенные измеритель частоты вращения ротора, первый элемент сравнения, алгебраический селектор минимума, корректирующее звено канала частоты вращения ротора и суммирующее устройство, последовательно соединенные разностное корректирующее звено и ключ, причем выход алгебраического селектора минимума соединен со входом разностного корректирующего звена, а выход ключа соединен со вторым входом суммирующего устройства, последовательно соединенные исполнительное устройство, газотурбинный двигатель, измеритель температуры газа и второй элемент сравнения, причем выход суммирующего устройства соединен со входом исполнительного устройства, второй выход газотурбинного двигателя соединен с измерителем частоты вращения ротора, а выход второго элемента сравнения соединен со вторым входом алгебраического селектора минимума, последовательно соединенные компаратор, дифференциатор и запоминающее устройство, причем входы компаратора подключены к выходам первого и второго элементов сравнения, а выход соединен со вторым входом ключа, выход разностного корректирующего звена соединен со вторым входом запоминающего устройства, ко второму входу первого элемента сравнения подключен задатчик частоты вращения ротора, а ко второму входу второго элемента сравнения подключен задатчик температуры газа, отличающаяся тем, что дополнительно содержит устройство компенсации, вход которого соединен с выходом запоминающего устройства, а выход соединен с третьим входом суммирующего устройства [патент РФ №2319026, МПК F02C 9/28. 10.03.2008].
Недостатком прототипа является невысокая точность при изменении режимов работы устройства, связанных с изменением высоты и скорости полета летательного аппарата, а также физических свойств авиационного топлива (плотность, вязкость и т.д.).
Задачей, на решение которой направлено заявляемое изобретение, является повышение качества функционирования системы автоматического регулирования короткоресурсного ГТД на всех режимах и во всех условиях его применения в составе беспилотного летательного аппарата.
Поставленная задача решается тем, что система автоматического регулирования газотурбинного двигателя, содержащая последовательно соединенные блок формирования управляющего воздействия, первое сравнивающее устройство, электронный регулятор, исполнительный механизм и газотурбинный двигатель, в отличие от протипа дополнительно содержит математическую модель газотурбинного двигателя и математическую модель исполнительного механизма, реализованные как устройства в бортовом цифровом компьютере летательного аппарата, второе и третье сравнивающие устройства, первый и второй датчики, логический блок, причем модель исполнительного механизма последовательно соединена с моделью газотурбинного двигателя, выходы которых соединены соответственно со вторым и третьем сравнивающими устройствами, выходы которых через логический блок соединены с электронным регулятором.
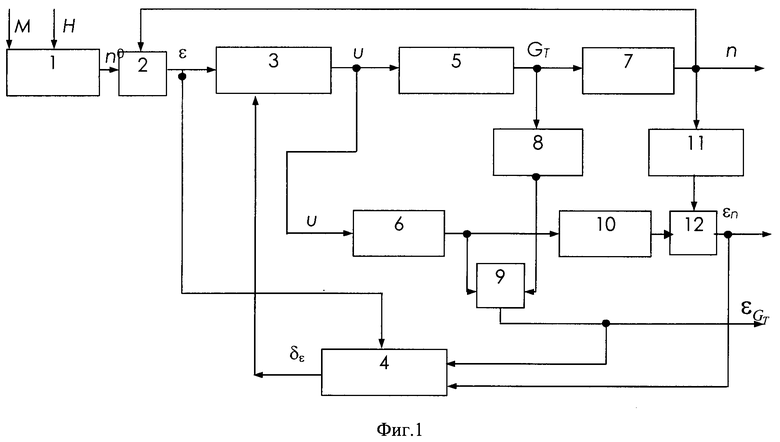
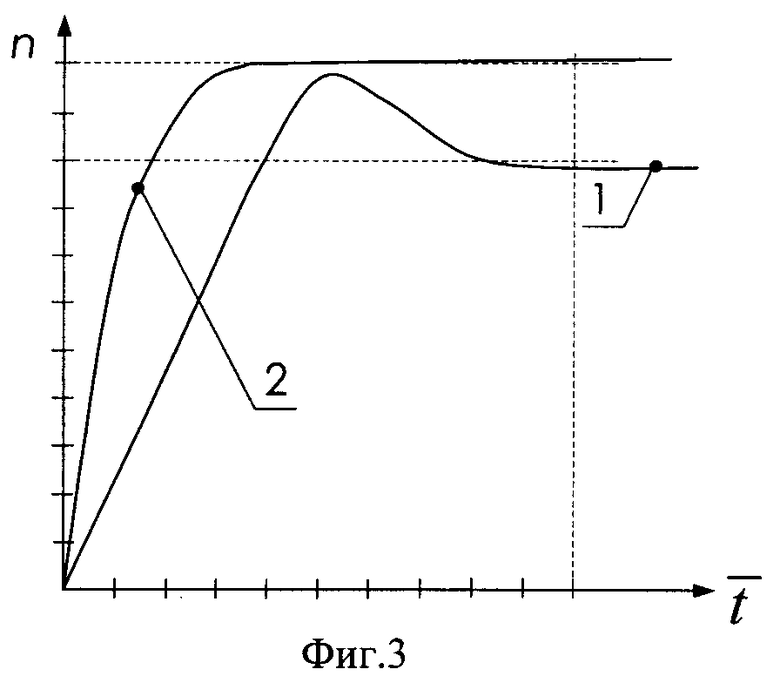
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема системы автоматического регулирования газотурбинного двигателя; на фиг.2 показаны кривые изменения коэффициентов k, τ=f(δε), служащих для коррекции параметров электронного регулятора с передаточной функцией в виде изодромного звена; на фиг.3 приведены переходные процессы в системе управления частотой вращения ГТД, полученные для следующих случаев:
1 - система регулирования по прототипу с электронным регулятором, передаточная функция которого есть изодромное звено;
2 - предлагаемая система с коррекцией по выбранному комплексу ошибок δε.
Система автоматического регулирования газотурбинного двигателя содержит последовательно соединенные блок 1 формирования управляющего воздействия и первое сравнивающее устройство 2, которое соединено с электронным регулятором 3, а также с логическим блоком 4, в свою очередь электронный регулятор 3 соединен с исполнительным механизмом 5, а также с моделью исполнительного механизма 6, реализованной как устройство в бортовом цифровом компьютере летательного аппарата, исполнительный механизм 5 соединен с газотурбинным двигателем 7 и первым датчиком 8, который, как и модель исполнительного механизма 6, соединен со вторым сравнивающим устройством 9, в свою очередь модель исполнительного механизма 6 соединена с моделью ГТД 10, газотурбинный двигатель 7 соединен со вторым датчиком 11, в свою очередь второй датчик 11 и модель ГТД 10 соединены с третьим сравнивающим устройством 12, которое вместе со вторым сравнивающим устройством 9 соединено с логическим блоком 4, который соединен с электронным регулятором 3.
CAP работает следующим образом: в канале частоты вращения ротора ГТД сигнал n поступает на первое сравнивающее устройство 2, где сравнивается с заданным значением n° блока 1 формирования управляющего воздействия, и подается на электронный регулятор 3, после регулирования CAP сигнал подается на исполнительный механизм 5 и на модель исполнительного механизма 6, которая реализована как устройство в бортовом цифровом компьютере летательного аппарата. От модели исполнительного механизма 6 сигнал поступает на сравнивающее устройство 9 и модель ГТД 10, которая реализована как устройство в бортовом цифровом компьютере летательного аппарата, с самого исполнительного механизма 5 сигнал поступает на вход ГТД 7 и на первый датчик 8, где преобразуется в безразмерную величину и поступает на второе сравнивающее устройство 9, на выходе которого выдается ошибка по расходу топлива, которая поступает на логический блок 4. Чтобы получить ошибку по частоте вращения, которая также поступает на логический блок 4, снимаются сигналы со второго датчика 11 и модели ГТД 10, эти сигналы поступают на третье сравнивающее устройство 12. В логическом блоке сравнивается два отношения: ошибки по частоте вращения к общей ошибке и ошибки по расходу топлива к общей ошибке, наибольшее из них поступает на регулятор 3.
Согласно схеме (фиг.1) вводятся следующие понятия: общая ошибка - ε; ошибка по расходу топлива  ; ошибка по частоте вращения - εn; комплексная ошибка - δε.
; ошибка по частоте вращения - εn; комплексная ошибка - δε.
Ошибки вычисляются по разнице между сигналами с объекта регулирования - ГТД и его модели, по разнице между сигналами с исполнительного механизма и его модели.
Далее ошибки приводятся к безразмерному виду, проходят через логический блок и подаются в электронный регулятор для коррекции его параметров.
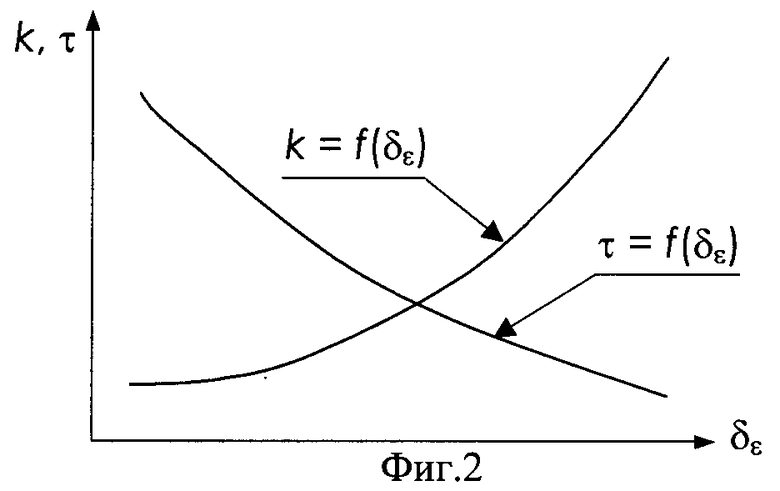
Существует несколько различных вариантов вычисления конечного параметра δε. Самый простейший - параметры электронного регулятора с передаточной функцией в виде изодромного звена
 ,
,
где k, τ=f(δε) изменяются, как показано на фиг.2.
Анализ качества полученных переходных процессов на фиг.3 показывает преимущества предлагаемой CAP, поскольку именно по кривой 2 можно видеть, что переходный процесс носит апериодический характер, а время регулирования меньше, чем в прототипе.
Таким образом, предложенное изобретение позволяет повысить качество функционирования CAP за счет более быстрой адаптации к различным режимам работы, связанным с изменением высоты и скорости полета, и позволяет в конечном итоге повысить качество регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2319026C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| УСТРОЙСТВО АВАРИЙНОГО УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА В ОСНОВНУЮ КАМЕРУ СГОРАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2432477C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2418964C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ НАПРАВЛЯЮЩИХ АППАРАТОВ КОМПРЕССОРА ДВУХКОНТУРНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2009 |
|
RU2422682C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2501964C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2409751C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2446298C1 |
Использование: авиаприборостроение, а именно в системах автоматического регулирования (CAP) газотурбинных двигателей (ГТД). Технический результат: повышение качества функционирования системы автоматического управления короткоресурсного ГТД на всех режимах и во всех условиях его применения в составе беспилотного летательного аппарата. Сущность изобретения: CAP ГТД содержит последовательно соединенные блок и первое сравнивающее устройство, которое соединено с электронным регулятором, а также с логическим блоком, в свою очередь электронный регулятор соединен с исполнительным механизмом, а также с моделью исполнительного механизма, реализованной как устройство в бортовом цифровом компьютере летательного аппарата, исполнительный механизм соединен с газотурбинным двигателем и первым датчиком, который, как и модель исполнительного механизма, которая соединена последовательно с моделью ГТД, соединен со вторым сравнивающим устройством, газотурбинный двигатель соединен со вторым датчиком, в свою очередь второй датчик и модель ГТД соединены с третьим сравнивающим устройством, которое вместе со вторым сравнивающим устройством соединено с логическим блоком, который соединен с электрическим регулятором. 3 ил.
Система автоматического регулирования газотурбинного двигателя, содержащая последовательно соединенные блок формирования управляющего воздействия, первое сравнивающее устройство, электронный регулятор, исполнительный механизм и газотурбинный двигатель, отличающаяся тем, что дополнительно содержит математическую модель газотурбинного двигателя и математическую модель исполнительного механизма, реализованные как устройства в бортовом цифровом компьютере летательного аппарата, второе и третье сравнивающие устройства, первый и второй датчики, логический блок, причем модель исполнительного механизма последовательно соединена с моделью газотурбинного двигателя, выходы которых соединены соответственно со вторым и третьим сравнивающими устройствами, выходы которых через логический блок соединены с электронным регулятором.
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2006 |
|
RU2319026C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| Электромагнитный сепаратор | 1949 |
|
SU80510A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2000 |
|
RU2172857C1 |
| US 6568166 B2, 27.05.2003 | |||
| ТКАНЬ С ПЕРЕПЛЕТЕНИЕМ ШИЛОВА | 2002 |
|
RU2228977C1 |

