Изобретение относится к области радиолокации и может быть использованию в системах поиска и слежения за воздушными объектами. Известно устройство определения дальности, изложенное в книге «Радиотехнические системы». Ю.М.Козаринов, 1990 г., стр.194-197. В нем измеряется дальность путем определения времени следования отраженного от объекта сигнала. В момент излучения зондирующего импульса с выхода передающего устройства на вход приемного устройства поступает сигнал, обеспечивающий первичную обработку принимаемого отраженного от объекта импульса, который преобразуется из электромагнитного в электрический и выделяется по характеристикам, присущим ожидаемым объектам. Известно устройство определения дальности, изложенное в книге Васин В.В., Степанов Б.М. «Справочник-задачник по радиолокации». М., 1977, стр.214, фиг.9.7
В нем увеличивается точность определения дальности. Принцип его работы заключается в следующем. Синхронизатор выдает синхроимпульс как команду передающему устройству на излучение зондирующего импульса. При этом на вход приемного устройства в этот момент поступает сигнал для обеспечения первичной обработки. Отраженный от объекта электромагнитный сигнал в приемном устройстве преобразуется в электрический и выделяется по характеристикам, соответствующим ожидаемому объекту. С выхода приемного устройства выделенный сигнал поступает в преобразователь временного интервала в код, куда ранее на другой вход поступил синхроимпульс с синхронизатора. Код с выхода преобразователя, характеризующий дальность, отображается на индикаторе. Однако точность определения дальности не всегда удовлетворяет предъявленным требованиям. С помощью предлагаемого устройства увеличивается точность определения дальности. Достигается это введением второго преобразователя временного интервала в код, постоянного запоминающего устройства, двух вычитателей и блока преобразования амплитуды в код, состоящего из: блока параллельных инверторов, блока вычитателей амплитуд, блока элементов совпадения и датчика напряжения, при этом выход синхронизатора соединены с первым входом второго преобразователя временного интервала в код, имеющий второй вход и группу выходов, соответственно соединенные с выходом передающего устройства и с первой группой входов первого вычитателя, имеющего вторую группу входов и группу выходов, соответственно соединенные с группой выходов первого преобразователя временного интервала в код и с первой группой входов второго вычитателя, имеющего группу выходов и вторую группу входов, соответственно соединенные с группой входов индикатора и через постоянное запоминающее устройство, через группу выходов блока преобразования амплитуды в код, через блок параллельных инверторов, с группой выходов блока вычитателей амплитуд, первая группа входов которого соединена с входом преобразователя амплитуды в код, соединенного также с выходом приемного устройства, и с входом блока элементов совпадения, имеющего группу выходов и группу входов, соответственно соединенные с второй группой входов блока вычитателей амплитуд и с группой выходов датчика напряжений.
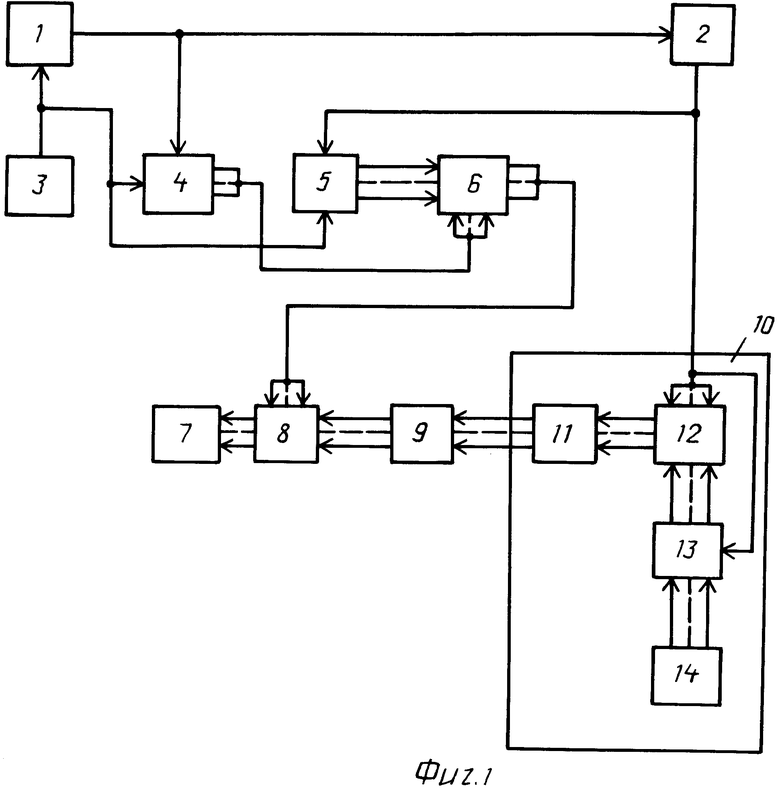
На фиг.1 и в тексте приняты следующие обозначения:
1 - передающее устройство;
2 - приемное устройство;
3 - синхронизатор;
4,5 - преобразователи временного интервала в код;
6 - вычитатель;
7 - индикатор;
8 - вычитатель;
9 - постоянное запоминающее устройство;
10 - блок преобразования амплитуды в код;
11 - блок параллельных инверторов;
12 - блок вычитателей амплитуд;
13 - блок элементов совпадения;
14 - датчик напряжений,
при этом выход синхронизатора 1 соединен с первыми выходами преобразователей временного интервала в код 4, 5 и через передающее устройство 1 - с вторым входом преобразователя 4, а также через приемное устройство 2 со вторым входом преобразователя 5, группа выходов которого соединена с второй группой входов вычитателя 6, имеющего первую группу входов и группу выходов, соответственно соединенных с группой выходов преобразователя временного интервала в код 4 и с первой группой входов вычитателя 8, группа выходов которого и вторая группа входов соответственно соединены с группой входов индикатора 7, и через постоянное запоминающие устройство 9, через группу выходов блока преобразования амплитуды в код 10, через блок параллельных инверторов 11 - с группой выходов блока вычитателей амплитуд 12, имеющего первую группу входов, соединенную с входом блока элементов совпадения 13 и с входом блока преобразования амплитуды в код 10, соединенного также с выходом приемного устройства 2, а вторая группа входов блока вычитателем амплитуд 12 соединена с группой выходов блока элементов совпадения 13, имеющего группу входов, соединенную с группой выходов датчика напряжений 14.
Устройство работает следующим образом.
Синхронизатор 3 выдает синхроимпульс как команду передающему устройству 1 на излучение зондирующего импульса. Одновременно с передающего устройства 1 на вход приемного устройства 2 поступает сигнал для обеспечения первичной обработки, например, так, как указано в книге «Радиотехнические системы». Ю.М.Казаринов. М., Высшая школа, стр.195, рис.7,5.
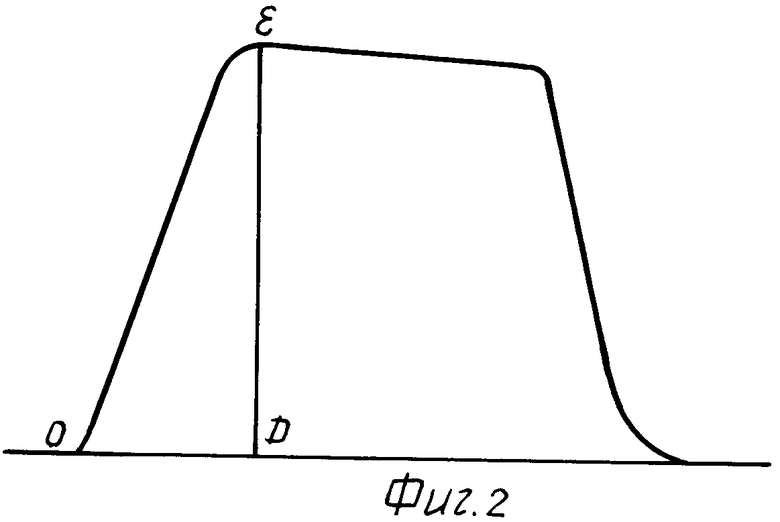
В приемном устройстве 2 отраженный от объекта электромагнитный сигнал преобразуется в электрический и выделяется по характеристикам, соответствующим ожидаемому объекту. Этот сигнал далее поступает на второй вход преобразователя временного интервал в код 5, на первый вход которого ранее поступил синхроимпульс с синхронизатора 3. Исполнение преобразователя 5 изложено в материалах справочника, представленном в вышеупомянутом главном аналоге. Информация с преобразователя 5, представляющая из себя грубую дальность, далее уточняется с помощью вновь введенных узлов. Предварительно с помощью преобразователя временного интервала в код 4 определяется временное рассогласование между синхроимпульсом, поступающим на его первый вход, и вышеупомянутым сигналом с передающего устройства 1. Эти рассогласования могут иметь нестабильный характер. Код с группы выходов преобразователя 4 вычитается в вычитателе 6 из кода с группы выходов преобразователя 5, и происходит первое уточнение дальности. Далее этот код поступает на первую группу входов вычитателя 8. Одновременно с приемного устройства 2 выделенный сигнал поступает на вход блока преобразования амплитуды в код 10. На фиг.2 показана форма зондирующего импульса, где показан плавно нарастающий его участок ОЕД. Также известно, что дальность обнаружения согласно уравнению дальности зависит от длительности зондирующего импульса. В связи с этим можно сделать вывод, что передняя часть отраженного от объекта импульса может быть не зафиксирована в приемном устройстве и чем меньше мощность импульса, а следовательно, и его амплитуда, тем больше будет погрешность определения дальности и тем больше измеренная дальность до объекта будет превышать фактическую. Поэтому для определения этой погрешности при известной длительности зондирующего импульса вводится блок преобразования амплитуды в код 10, постоянное запоминающее устройство 9 и вычитатель 8. Блок 10 состоит из ряда узлов. Поясним их работу. Датчик напряжения 14 выдает со своей группы выходов определенное количество напряжений разной величины на группу входов блока элементов совпадения 13, пропускающего эти напряжения в момент прихода сигнала с приемного устройства 2, на вторую группу входов блока вычитателей 12. А на первую группу входов этого блока поступают равные амплитуды сигнала с приемного устройства 2 благодаря разветвлению входа блока преобразования амплитуды в код 10. При этом количество разветвлений равно количеству напряжений с датчика 14. Поэтому с группы выходов блока вычитания амплитуд 12 будут одновременно поступать сигналы, характеризующие разности амплитуды с приемного устройства и амплитуд с блока элементов совпадения 13, и там, где амплитуды будут равны на входах соответствующего вычитателя, на его выходе будет иметь место отсутствие сигнала. Сигналы с группы выходов блока вычитателей амплитуд 12 поступают на группу входов блока параллельных инверторов 11, где сработает тот инвертор, у которого на входе будет присутствовать сигнал, в то время как на других выходах инверторов сигналы будут отсутствовать. Следовательно, после поступления сигнала с приемного устройства 2 на группе выходов блока 11 будет фиксироваться десятичный код, характеризующий погрешность определения дальности, зависящую от амплитуды принимаемого сигнала.
Группа выходов блока 11 соединена с группой входов постоянного запоминающего устройства 9, где каждому значению десятичного кода будет соответствовать определенный запомненный двоичный код. Этот код вычитается в вычитателе 8 из вышеупомянутого кода, поступающего с группы выходов вычитателя 6, и происходит второе уточнение дальности. Разность с группы выходов вычитателя 8 поступает на группу входов индикатора 7 для отображения. Пример конкретного исполнения блока вычитания амплитуд 12 представлен в вышеупомянутой книге «Радиотехнические системы», стр. 408, рис.18.13.
Предлагаемое устройство может быть использовано в системах управления воздушными движением и в системах предупреждений столкновений. Оно может быть внедрено в действующих радиолокаторах. Таким образом, использование предлагаемого устройства обеспечит экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2004 |
|
RU2253879C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2010 |
|
RU2416104C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2000 |
|
RU2208813C2 |
| РАДИОЛОКАТОР | 1995 |
|
RU2096806C1 |
Изобретение относится к области радиолокации и может быть использовано в системах поиска и слежения за воздушными объектами. Достигаемый технический результат - увеличение точности определения дальности. Указанный результат достигается благодаря тому, что заявленное устройство содержит определенным образом соединенные между собой передающее устройство, приемное устройство, синхронизатор, два преобразователя временного интервала в код, индикатор, постоянное запоминающее устройство, два вычитателя, блок преобразования амплитуды в код, состоящий из блока параллельных инверторов, блока вычитателей амплитуд, блока элементов совпадения, датчика напряжений. 2 ил.
Устройство определения дальности, состоящее из передающего устройства, приемного устройства, синхронизатора, преобразователя временного интервала в код и индикатора, где выход синхронизатора соединен с входом передающего устройства, а также с первым входом преобразователя временного интервала в код, имеющим второй вход, соединенный с выходом приемного устройства, отличающееся тем, что вводится второй преобразователь временного интервала в код, постоянное запоминающее устройство, два вычитателя и блок преобразования амплитуды в код, состоящий из блока параллельных инверторов, блока вычитателей амплитуд, блока элементов совпадения и датчика напряжений, при этом выход синхронизатора соединен с первым входом второго преобразователя временного интервала в код, имеющим второй вход и группу выходов, соответственно соединенные с выходом передающего устройства и с первой группой входов первого вычитателя, имеющего вторую группу входов и группу выходов, соответственно соединенные с группой выходов первого преобразователя временного интервала в код и с первой группой входов второго вычитателя, имеющего группу выходов и вторую группу входов, соответственно соединенные с группой входов индикатора и через постоянное запоминающее устройство, через группу выходов блока преобразования амплитуды в код, через блок параллельных инверторов, с группой выходов блока вычитателей амплитуд, первая группа входов которого соединена с входом преобразователя амплитуды в код, соединенного также с выходом приемного устройства, и с входом блока элементов совпадения, имеющего группу выходов и группу входов, соответственно соединенные с второй группой входов блока вычитателей амплитуд и с группой выходов датчика напряжений.
| ВАСИН В.В | |||
| и др | |||
| Справочник-задачник по радиолокации | |||
| - М., 1977, с.214, фиг.9.7 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2009 |
|
RU2413241C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2000 |
|
RU2208813C2 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ МЕЖДУ ВОЗДУШНЫМИ СУДАМИ | 2007 |
|
RU2346293C2 |
| US 7978123 В2, 12.07.2011 | |||
| US 20110260909 A1, 27.10.2011 | |||
| US 4905009 А, 27.02.1990 | |||
| CN 101982794 А, 02.03.2011. | |||

