Изобретение относится к средствам наглядного отображения информации и может быть использовано в рекламно-информационных и демонстрационных установках, имеющих возможность последовательного повторного представления ряда изображений на рекламном поле, в частности в рекламных динамических установках.
Широко известны способы рекламирования, в которых усиление воздействия на потребителя целевой информации достигается различными приемами привлечения его внимания, например с использованием рекламных динамических установок, на которых отдельные фрагменты изображения, составляющие рекламно-информационное поле, размещают на сторонах поворотных элементов (обычно гранях трехгранных призм), установленных с возможностью вращательного движения. Исследования показывают, что способы смены изображения (позиций), при которых последовательно с заданной остановкой меняются отдельные информационные элементы, расположенные на разных сторонах поворотных элементов (например, гранях призм) эффективны и, что динамические рекламоносители в пять раз эффективнее статичных.
Основой таких установок являются механизмы передачи вращательного момента и именно от них в существенной степени зависит способ смены рекламного изображения. Наиболее распространены рекламные установки (см., например, патент RU №2165649, опубл. 20.04.2001 г.), содержащие связанный с двигателем ведущий вал с размещенными на нем ведущими звеньями, воздействующими при вращении вала на ведомые звенья, связанными с поворотными элементами - призмами. Конструкции рекламных установок предусматривают возможность использования двух и более двигателей (например, по обеим сторонам информационного поля), установку на ведущем валу «правых» и «левых» ведущих звеньев и различные комбинации их расположения с целью получения различных вариантов смены информационного изображения. Ведущие звенья могут быть установлены на ведущем валу с последовательно заданным угловым (например, по винтовой линии вокруг вала) смещением. При таком расположении при включении двигателя поворот элементов с компонентами рекламно-информационного изображения происходит с некоторым запаздыванием поворота каждого последующего элемента от предыдущего, а изображение меняется по принципу «бегущей волны»
Известен из патента РФ №2230374 (опубл. 2004.06.10) способ демонстрации информационных полей, в котором предпринята попытка для реализации эффекта по принципу «бегущей волны» регламентировать принцип выбора расстояния Н между осями соседних элементов одной позиции таким образом, чтобы обеспечить свободное вращение элементов различными видами в любом направлении, как слева направо, так и справа налево. Для этого по патенту расстояние Н между осями соседних элементов одной позиции выбирают не менее H≥2 L, ширину элементов выбирают не более L≤173·R, где L - ширина элемента информационного поля, a R - радиус вращения крайних по ширине точек элементов, при этом каждый элемент располагают на расстоянии от своей оси вращения, равном половине радиуса вращения крайних точек элемента b=R/2, где b - кратчайшее расстояние от элемента до оси его вращения. Причем, когда задается начало вращения одного концевого элемента и среднего элемента в направлении к другому концевому элементу, в этом случае также вращение может быть задано как слева направо, так и справа налево, кроме этого возможен вариант: начало вращения концевых элементов навстречу друг другу к середине информационного поля, причем вращение каждого элемента и в этом случае может осуществляться как по часовой стрелке, так и против часовой стрелки.
Недостатком предложенного технического решения является то, что для обеспечения указанных вариантов беспрепятственного вращения элементов расстояния между осями вращения соседних элементов выбирается как минимум в два раза превышающее ширину элемента, что не обеспечивает наглядности сформированного изображения.
Известно из заявки на патент РФ №2002109110 (опубл. 2003.12.20), выбранное в качестве прототипа устройство для размещения рекламы, содержащее набор поворотных элементов-колонок, симметричных относительно своих продольных осей с возможностью поворота вокруг них, размещенного таким образом, что при повороте всех колонок образуется последовательно замещаемый носитель информации, при этом каждая колонка закреплена на кронштейне с приводом для поворота колонки, а углы поворота колонок задаются и контролируются командаппаратом, к которому подключены привода всех колонок. Устройство содержит датчик направления ветра, связанный с командаппаратом таким образом, что при изменении направления ветра командаппарат имеет возможность менять направление поворота колонок с помощью приводов. При смене изображения колонки поворачивают либо в ту, либо в другую сторону одновременно или в последовательности, соответствующей направлению поворота колонок.
Общим недостатком известных способов и рекламных установок служит небольшое количество применяемых приемов смены позиций рекламного поля, а также их однотипность при смене одной позиции на другую.
В основу настоящего изобретения поставлена задача - создание такого способа рекламирования и устройства для его осуществления, которые позволяют расширить функциональные возможности и повысить занимательность подачи информации для повышения эффективности воздействия рекламирования за счет увеличения используемых для этапов смены изображения количества приемов, использующих регулируемые средством управления работой устройства параметры и качественные характеристики условий смены изображения независимо от конфигурации рекламно-информационного поля и механизма привода рекламных установок с вращающимися поворотными элементами.
Поставленная задача решается тем, что в способе рекламирования, содержащем этап позиционирования, при котором на, по меньшей мере, одном заданном участке рекламного поля, образованном фрагментами рекламно-информационного изображения, размещенных на предварительно определенных в соответствии с выбранными позициями сторонах поворотных элементов, установленных на заданном расстоянии между осями соседних поворотных элементов и с возможностью вращения каждого из них вокруг своей оси, поворотные элементы удерживают некоторое время в статическом состоянии положения заданной позиции, а также этап смены позиций заданной длительности, при котором на, по меньшей мере, одном заданном участке осуществляют поворот всех поворотных элементов на заданный угол, при этом вращение в заданном направлении и остановку поворотных элементов обеспечивают требуемым воздействием приводных средств, каждое из которых приспособлено для обеспечения требуемого воздействия на заданное количество поворотных элементов и связано со средством управления, устроенным для выработки избирательно подаваемых на приводные средства управляющих сигналов, посредством одного из которых, интерпретируемого как сигнал первого типа, достигается вращение поворотных элементов, а посредством другого, интерпретируемого как сигнал второго типа, достигается остановка вращения поворотных элементов, при этом используют заранее заданное условие, определяющее последовательность подачи сигналов каждого типа, новым является то, что на этапе смены позиций в, по меньшей мере, одной выбранной группе соседних приводных средств заданного участка, имеющей первое и второе крайние приводные средства, при повороте поворотных элементов от первого выбранного угла до второго выбранного угла длительность сигнала первого типа, подаваемого на каждое последующее приводное средство, начиная от выбранного первого крайнего приводного средства, последовательно уменьшают, при этом вращение поворотных элементов, связанных с различными приводными средствами, осуществляют с отличающимися друг от друга значениями угловых скоростей. Целесообразно при этом, чтобы заранее заданное условие предусматривало по выбору подачу сигналов второго типа последовательно, если сигналы первого типа подавали одновременно, или подачу сигналов второго типа одновременно, если сигналы первого типа подавали последовательно, или подачу сигналов второго типа последовательно, начиная со второго крайнего приводного средства, если сигналы первого типа подавали последовательно, начиная с выбранного первого крайнего приводного средства.
Целесообразно, чтобы для каждого заранее заданного условия первое крайнее приводное средство выбирали с учетом заданного направления вращения поворотных элементов и некоторого постоянного для каждой пары соседних поворотных элементов, связанных с различными приводными средствами параметра, характеризующего зону их возможного пересечения при вращении. В качестве упомянутого постоянного параметра целесообразно использовать параметрический угол, определяемый для каждой пары соседних поворотных элементов в статическом состоянии положения заданной позиции как угол, лежащий в плоскости сечения, перпендикулярной осям вращения поворотных элементов и вершина которого совпадает с осью вращения одного из поворотных элементов, одна из сторон проходит через ту крайнюю точку стороны поворотного элемента, на которой демонстрируют рекламное изображение и которая является ближайшей к соседнему поворотному элементу, а другая сторона этого угла проходит через дальнюю по отношению к наблюдателю точку пересечения принадлежащих этой же плоскости двух условных окружностей, в одну из которых вписано поперечное сечение одного из поворотных элементов, а в другую - поперечное сечение соседнего с ним поворотного элемента
Предпочтительно при заранее заданном условии, предусматривающем подачу сигналов первого типа одновременно, а подачу сигналов второго типа последовательно в выбранной группе приводных средств, в которой все упомянутые параметрические углы имеют значение меньше 60°, упомянутое первое крайнее приводное средство выбрать так, чтобы направление последовательности подачи сигналов второго типа совпадало с видимым со стороны наблюдателя направлением перемещения сторон поворотных элементов.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа одновременно, а подачу сигналов второго типа последовательно в выбранной группе приводных средств, в которой все параметрические углы имеют значение меньше 60°, первое крайнее приводное средство выбирать так, чтобы направление последовательности подачи сигналов второго типа было противоположно видимому со стороны наблюдателя направлению перемещения сторон поворотных элементов.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа одновременно, а подачу сигналов второго типа последовательно в выбранной группе приводных средств, в которой, по меньшей мере, один параметрический угол больше или равен 60°, первое крайнее приводное средство выбрать так, чтобы направление последовательности подачи сигналов второго типа совпадало с видимым со стороны наблюдателя направлением перемещения сторон поворотных элементов, причем выбранную группу формируют с учетом упомянутого параметрического угла.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа последовательно, а подачу сигналов второго типа одновременно в выбранной группе приводных средств, в которой все упомянутые параметрические углы имеют значение меньше 60°, первое крайнее приводное средство выбрать так, чтобы направление последовательности подачи сигналов первого типа совпадало с видимым со стороны наблюдателя направлением перемещения сторон поворотных элементов.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа последовательно, а подачу сигналов второго типа одновременно в выбранной группе приводных средств, в которой все параметрические углы имеют значение меньше 60°, первое крайнее приводное средство выбрать так, что направление последовательности подачи сигналов первого типа противоположно видимому со стороны наблюдателя направлению перемещения сторон поворотных элементов.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа последовательно, а подачу сигналов второго типа одновременно в выбранной группе приводных средств, в которой, по меньшей мере, один упомянутый параметрический угол больше или равен 60°, первое крайнее приводное средство выбрать так, что направление последовательности подачи сигналов первого типа совпадает с видимым со стороны наблюдателя направлением перемещения сторон поворотных элементов, причем выбранную группу формируют с учетом упомянутого параметрического угла.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа последовательно от первого выбранного крайнего приводного средства, а подачу сигналов второго типа последовательно от второго крайнего приводного средства, в выбранной группе приводных средств, в которой все упомянутые параметрические углы имеют значение меньше 60°, первое крайнее приводное средство выбрать так, что направление последовательности подачи сигналов первого типа совпадает с видимым со стороны наблюдателя направлением перемещения сторон поворотных элементов.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа последовательно от первого выбранного крайнего приводного средства, а подачу сигналов второго типа последовательно от второго крайнего приводного средства для выбранной группы приводных средств, в которой, по меньшей мере, один упомянутый параметрический угол больше или равен 60°, первое крайнее приводное средство выбрать так, что направление последовательности подачи сигналов первого типа совпадает с видимым со стороны наблюдателя направлением перемещения сторон поворотных элементов, причем выбранную группу формируют с учетом упомянутого параметрического угла.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа последовательно от первого выбранного крайнего приводного средства, а подачу сигналов второго типа последовательно от второго крайнего приводного средства для выбранной группы приводных средств, в которой все упомянутые параметрические углы имеют значение меньше 60°, первое крайнее приводное средство выбрать так, что направление последовательности подачи сигналов первого типа противоположно видимому со стороны наблюдателя направлению перемещения сторон поворотных элементов.
Возможно при заранее заданном условии, предусматривающем подачу сигналов первого типа последовательно от первого выбранного крайнего приводного средства, а подачу сигналов второго типа последовательно от второго крайнего приводного средства, при этом для выбранной группы приводных средств, в которой, по меньшей мере, один упомянутый параметрический угол больше или равен 60°, первое крайнее приводное средство выбирают так, что направление последовательности подачи сигналов первого типа противоположно видимому со стороны наблюдателя направлению перемещения сторон поворотных элементов, причем выбранную группу формируют с учетом упомянутого параметрического угла.
Целесообразно, чтобы первый выбранный угол имел по существу нулевое значение, а второй угол имел значение по существу равное заданному углу.
Возможно, чтобы первый выбранный угол имел значение, превышающее нулевое, а второй угол имел значение, по существу равное заданному углу. Предпочтительно при этом, чтобы значение упомянутого первого выбранного угла было меньше 60°.
Кроме того, первый выбранный угол может иметь значение, превышающее нулевое, а второй угол при этом имеет значение меньше, чем упомянутый заданный угол.
Предпочтительно, чтобы значение длительности этапа смены позиций или значение угловой скорости вращения поворотных элементов являлись изменяемыми параметрами.
Целесообразно, чтобы, по меньшей мере, одно приводное средство выбранной группы было приспособлено для вращения одного поворотного элемента и содержало один электродвигатель.
Возможно, чтобы, по меньшей мере, одно приводное средство выбранной группы было приспособлено для вращения, по меньшей мере, двух поворотных элементов и содержало один электродвигатель.
Целесообразно, чтобы выбранная группа соседних приводных средств являлась приводными средствами заданного участка. Предпочтительно, чтобы стороны поворотных элементов, связанных с приводными средствами выбранной группы, на этапе позиционирования образовывали рекламное поле.
Возможно, чтобы этапы смены, по меньшей мере, двух, следующих друг за другом позиций осуществляли с использованием отличающихся друг от друга заранее заданных условий, при этом средство управления было выполнено с возможностью изменения заранее заданного условия для выбранной группы. Предпочтительно, чтобы этапы смены, по меньшей мере, двух, следующих друг за другом позиций осуществляли с использованием отличающихся друг от друга заранее заданных условий, и чтобы при этом средство управления было выполнено с возможностью изменения упомянутой выбранной группы.
Целесообразно, чтобы средство управления содержало множество заранее заданных условий заданных условий, из которых выбирают конкретное заранее заданное условие, чтобы использовать для каждого одного или более этапа смены позиций на одном или более заданных участках для одной или более упомянутых выбранных групп, при этом средство управления содержит средство для выбора конкретного заранее заданного условия.
Целесообразно, чтобы, по меньшей мере, один заданный участок имел, по меньшей мере, две упомянутые выбранные группы приводных средств, для которых применяют одинаковые заранее заданные условия. Возможно при этом, чтобы выбранные первые крайние приводные средства каждой выбранной группы являлись соседними или чтобы второе крайнее приводное средство одной выбранной группы являлось соседним с выбранным первым крайним приводным средством другой выбранной группы или чтобы вторые крайние приводные средства каждой выбранной группы являлись соседними.
Целесообразно, чтобы, по меньшей мере, один заданный участок имел, по меньшей мере, две упомянутые выбранные группы приводных средств, в которых используют различные заранее заданные условия. Возможно при этом, чтобы выбранные первые крайние приводные средства каждой упомянутой выбранной группы являлись соседними или чтобы вторые крайние приводные средства каждой упомянутой выбранной группы являлись соседними или чтобы второе крайнее приводное средство одной выбранной группы являлось соседним с выбранным первым крайним приводным средством другой выбранной группы.
Целесообразно, чтобы приводные средства, по меньшей мере, одной выбранной группы обеспечивали возможность реверсивного вращения поворотных элементов этой группы в направлении по требованию средства управления.
Кроме того, управляющий сигнал первого типа содержит информацию о направлении вращения и выбранной угловой скорости вращения поворотных элементов, связанных с тем приводным средством, на который подается упомянутый управляющий сигнал.
Целесообразно, чтобы управляющий сигнал второго типа в течение своей длительности обеспечивал фиксированное состояние поворотных элементов в том положении, которое они занимают в момент подачи упомянутого сигнала на связанное с ними приводное средство.
Предпочтительно, чтобы упомянутая выбранная группа содержала, по меньшей мере, три приводных средства.
Целесообразно, чтобы поворотные элементы были выполнены в виде трехсторонних призмообразных элементов, предпочтительно трехгранных призм, при этом заданный угол по существу равен 120°.
Предпочтительно, чтобы средство управления было выполнено с возможностью изменения значения, по меньшей мере, одного регулируемого средством управления параметра работы приводного средства, выбираемого из множества значений.
Целесообразно, чтобы средство управления было устроено так, что с его помощью осуществлялся любой из вышеописанных способов рекламирования.
Целесообразно при выборе длительности сигнала первого типа, подаваемого на каждое последующее приводное средство, начиная от выбранного первого крайнего, использовать модель расчета, основанную на том, что при вращении соседних поворотных элементов, связанных с различными приводными средствами, углы поворота в каждой паре соседних поворотных элементов, связанных с различными приводными средствами подбирают так, чтобы один из поворотных элементов этой пары не заходил в зону их возможного пересечения до тех пор, пока другой из нее не вышел.
Желательно, чтобы согласно упомянутой модели расчета, значение длительности сигнала первого типа, подаваемого на каждое последующее приводное средство задавали в зависимости от длительности сигнала первого типа, подаваемого на ближайшее к нему предыдущее приводное средство и угла поворота поворотных элементов, связанных с упомянутым предыдущим приводным средством на момент подачи управляющих сигналов на последующее приводное средство, при этом упомянутый угол поворота выбирают из заранее определенного диапазона.
Целесообразно, чтобы заданное расстояние между осями соседних поворотных элементов выбирали из диапазона согласно условию:

где H - расстояние между осями двух соседних поворотных элементов,
с° - измеряемый со стороны наблюдателя угол между двумя линиями, проходящими через крайние точки тех сторон двух соседних поворотных элементов, на которых демонстрируют рекламное изображение выбранной позиции,
b - кратчайшее расстояние от линии, соединяющей крайние точки стороны поворотного элемента до оси его вращения, выбираемое из диапазона:  ,
,
где S - толщина стороны поворотного элемента в ее крайней точке,
L - длина отрезка, соединяющего две крайние точки стороны поворотного элемента.
Поставленная задача решается также тем, что предлагается динамическая рекламная установка, содержащая множество установленных с возможностью вращения вокруг своей оси поворотных элементов, стороны которых с размещенными на них в соответствии с выбранными позициями фрагментами рекламно-информационного изображения на этапе позиционирования образуют рекламное поле, множество приводных средств, каждое из которых приспособлено для обеспечения требуемого воздействия на заданное количество поворотных элементов для их остановки или вращения на этапе смены позиций заданной длительности, при котором на, по меньшей мере, одном заданном участке осуществляют поворот всех поворотных элементов на заданный угол, связанное с приводными средствами средство управления, устроенное для выработки избирательно подаваемых на приводные средства управляющих сигналов, посредством одного из которых, интерпретируемого как сигнал первого типа, достигается вращение поворотных элементов в заданном направлении, а посредством другого, интерпретируемого как сигнал второго типа, достигается остановка вращения поворотных элементов, при этом поворотные элементы установлены на заранее заданном расстоянии между осями соседних поворотных элементов, а средство управления устроено для подачи на этапе смены позиций управляющих сигналов в соответствии с заранее заданным условием, определяющим последовательность подачи сигналов каждого типа.
Новым является то, что средство управления выполнено так, что на этапе смены позиций при повороте поворотных элементов от первого выбранного угла до второго выбранного угла длительность сигнала первого типа, подаваемого на каждое последующее приводное средство, начиная от выбранного первого крайнего приводного средства, последовательно уменьшается, а вращение поворотных элементов, связанных с различными приводными средствами, осуществляется с отличающимися друг от друга значениями угловых скоростей.
Целесообразно, чтобы динамическая рекламная установка была устроена так, чтобы на ней осуществлялся любой из вышеописанных способов рекламирования.
Наиболее полно понять и разобраться можно в приведенном далее подробном описании со ссылками на примеры и чертежи, на которых представлено
на фиг.1 - схематичное представление рекламной установки,
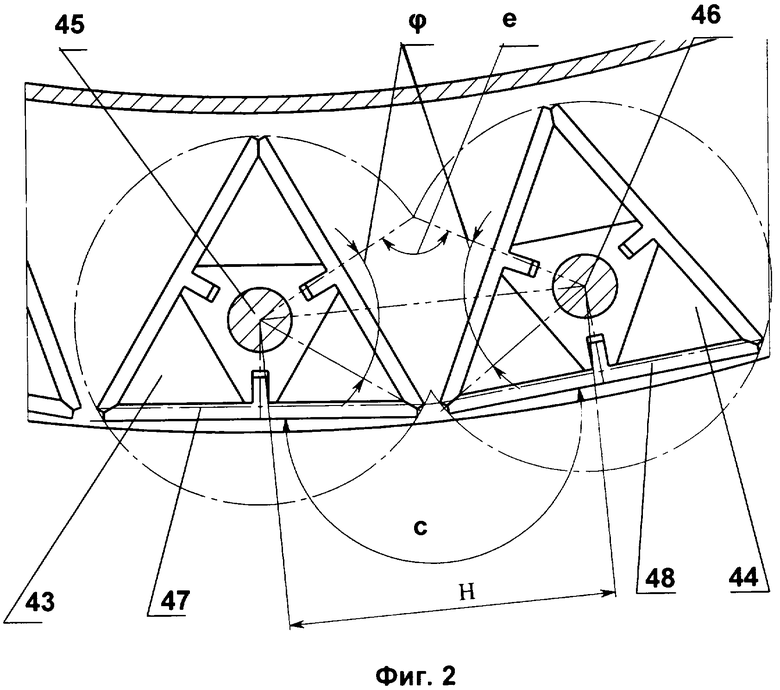
на фиг.2 - представлены поперечные сечения двух соседних поворотных элементов, связанных с различными приводными средствами на участке выпуклой кривизны для иллюстрации параметрического угла и расчетных зависимостей,
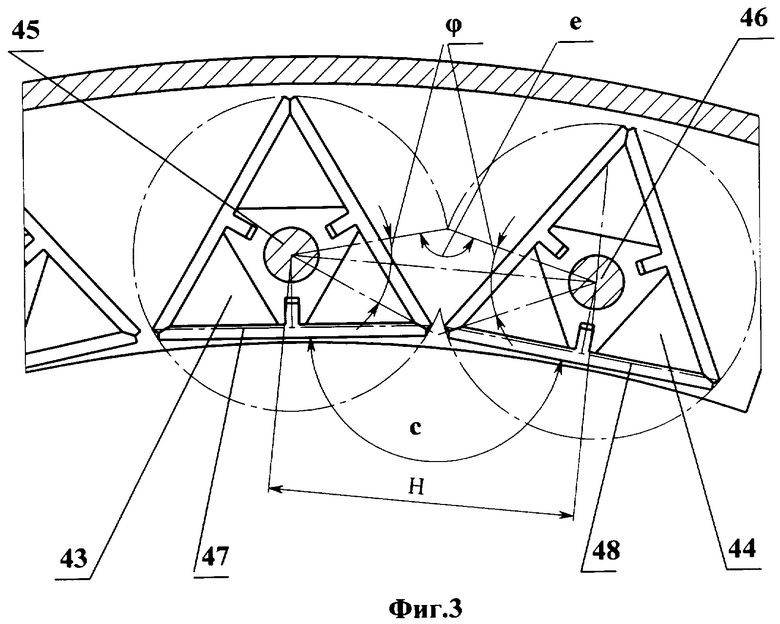
на фиг.3 - представлены поперечные сечения двух соседних поворотных элементов, связанных с различными приводными средствами на участке вогнутой кривизны для иллюстрации параметрического угла и расчетных зависимостей,
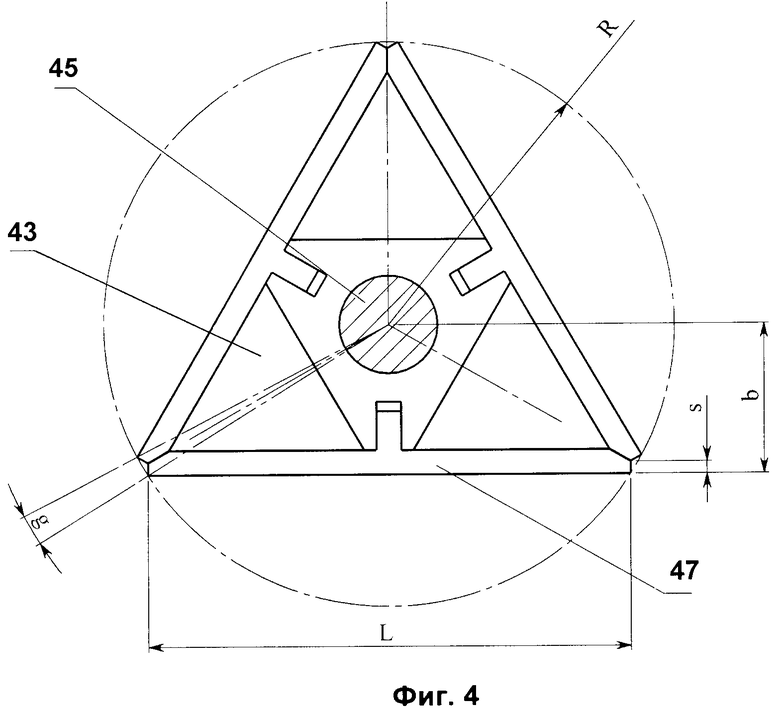
на фиг.4 - представлено поперечное сечение поворотного элемента для иллюстрации расчетных зависимостей.
Рекламная установка в соответствии с предлагаемым изобретением, схематично в упрощенном варианте проиллюстрированная на фиг.1, содержит средство управления 1, связанное с каждым блоком управления двигателей (не изображены) приводных средств 2-10, воздействующих на связанные с ними поворотные элементы соответственно 11-25 с размещенными на их сторонах фрагментами рекламно-информационного изображения. Стороны поворотных элементов 11-25 при установке поворотных элементов так, что фрагменты изображения выбранной позиции, расположенные по существу на одной общей поверхности со стороны наблюдателя (по стрелке А) образуют рекламно-информационное поле.
Рекламное поле, если смотреть с лицевой стороны установки (со стороны наблюдателя), может иметь участки, на которых в плоскости сечения, перпендикулярной осям поворотных элементов линии, проведенные через оси поворотных элементов, связанных с различными приводными средствами будут иметь выгнутый (поворотные элементы 20-25), прямолинейный (поворотные элементы 16-20) или вогнутый (поворотные элементы 11-16) характер (далее для участков или рекламного поля в этом смысле применяется термин кривизна). В частных вариантах исполнения рекламная установка может быть выполнена так, что все рекламное поле будет образовано участками одной какой-либо кривизны. Наиболее широко используемым является рекламное поле по существу прямолинейной конфигурации.
Поворотные элементы 11-25 выполнены в виде трехсторонних призмообразных элементов (в плоскости сечения перпендикулярной осям поворотных элементов прямые соединяющие крайние точки сторон образуют треугольник). В вариантных исполнениях сторонам поворотных элементов может быть придана слегка изогнутая форма так, что они представляются выпуклыми или вогнутыми, если смотреть с лицевой стороны.
В частном и наиболее распространенном случае поворотные элементы выполняют в виде трехгранных призм.
Каждое приводное средство 2-10 содержит считающийся известным двигатель (не изображен), связанное с двигателем средство для передачи вращательного движения поворотным элементам (не изображено) и блока управления двигателем (не изображен), который обеспечивает задаваемую скорость вращения поворотных элементов в заданном направлении, а также их остановку и фиксацию в статическом положении по команде со средства управления 1.
Средство для передачи движения вращательного движения поворотным элементам может быть выполнено в виде известных механизмов передачи вращающего момента рекламных модулей (см., например, патент RU №2165649 или RU №2262140), которые устроены так, что некоторое количество поворотных элементов одновременно приводятся во вращение при включении одного или двух двигателей как приводного средства, например как показанные на фиг.1 поворотные элементы 14, 15 и 16, связанные с приводным средством 4. Поворотный элемент может быть напрямую связан с валом двигателя, например как показанные на фиг.1 поворотные элементы 20 или 21, связанные с приводными средствами соответственно 6 и 7. Вал двигателя может быть связан с парой поворотных элементов, например как показанные на фиг.1 поворотные элементы 11 и 12, связанные с приводным средством 2.
Рекламная установка в вариантных исполнениях может быть выполнена так, что каждое его приводное средство будет приводить во вращение один поворотный элемент или же каждое его приводное средство будет приводить во вращение несколько поворотных элементов.
Двигатель может представлять собой, например, известный электрический двигатель постоянного тока или же шаговый электрический двигатель.
Приводное средство позволяет обеспечить при помощи блока управления двигателем, принимающим управляющие сигналы от средства управления, различную скорость вращения поворотных элементов, задаваемую в соответствии с выполняемой программой управления.
Приводные средства всей рекламной установки или ее части могут быть выполнены с возможностью реверсивного вращения связанных с ним поворотных элементов, а блок управления двигателем регулирует в этом случае также и направление вращения поворотных элементов по требованию со средства управления.
Средство управления 1, предназначенное для формирования на выходе сигналов управляющих воздействий в виде электрических сигналов, избирательно подаваемых на входы блоков управления электродвигателями приводных средств 2-10, содержит дешифратор управляющих воздействий 26, дешифратор вариантов смены позиций 27, счетчик тактовых импульсов 28, счетчик позиций 29, генератор тактовых импульсов 30, таймер 31 и блок начальной установки 32.
Первый вход дешифратора управляющих воздействий 26 по линии связи 33 соединен с первым выходом дешифратора вариантов смены позиций 27, а второй вход дешифратора управляющих воздействий 26 по линии связи 34 соединен с выходом счетчика тактовых импульсов 28. Выход счетчика 28 по линии связи 34 также связан со вторым входом дешифратора вариантов смены 27, при этом первый вход дешифратора вариантов смены 27 по линии связи 35 соединен с выходом счетчика позиций 29. Второй выход дешифратора вариантов смены позиций 27 по линии 36 связан с первым входом таймера 31, а третий выход дешифратора вариантов смены позиций 27 связан по линии 37 со вторым входом таймера 31, первый выход которого по линии 38 связан с первым входом счетчика позиций 29. Второй выход таймера 31 по линии 39 соединен с первым входом счетчика тактовых импульсов 28. Третий выход таймера 31 связан по линии связи 40 с входом генератора тактовых импульсов 30, выход которого связан по линии 41 со вторым входом счетчика тактовых импульсов 28. Блок начальной установки 32 по линии связи 42 соединен своим выходом с третьим входом таймера 31, вторым входом счетчика позиций 29 и третьим входом счетчика тактовых импульсов 28.
Дешифратор управляющих воздействий 26 предназначен для подачи сигналов управляющих воздействий в виде электрических сигналов первого или второго типа.
Управляющий сигнал первого типа обеспечивает вращение поворотных элементов каждого приводного средства с выбранной для каждого приводного средства угловой скоростью в течение определенного интервала времени, одинакового для всех приводных средств. Длительность определенного интервала времени равна длительности периода следования тактовых импульсов с генератора 30.
Сигнал первого типа содержит информацию о заданном направлении и выбранной угловой скорости вращения поворотных элементов, связанных с тем приводным средством, на который подается управляющий сигнал. Информация о выбранной угловой скорости вращения поворотных элементов может быть передана блоку управления приводного средства в виде уровня напряжения или силы тока или частоты следования импульсов. Управляющий сигнал второго типа в течение своей длительности обеспечивает фиксированное состояние поворотного элемента в том положении, которое он занимает на момент подачи сигнала. В каждый момент времени блоку управления приводным средством подается сигнал или первого или второго типа. Сигнал первого типа отключает сигнал второго типа, который в свою очередь отключает сигнал первого типа. Сигналы управляющих воздействий на выходе дешифратора управляющих воздействий 26 формируются в зависимости от сигналов, поступающих на его первый вход с выхода дешифратора вариантов смены позиций 27 и второй вход с выхода счетчика тактовых импульсов 28.
Счетчик позиций 29 предназначен для последовательного цикличного подсчета порядкового номера варианта смены текущей позиции на последующую позицию из общего количества вариантов, и подачи этого номера на первый вход дешифратора вариантов смены позиций 27.
Дешифратор вариантов смены позиций 27 предназначен для подачи со своего выхода на первый вход дешифратора управляющих воздействий 26 сигнала о номере текущего варианта смены позиций, соответствующего порядковому номеру варианта смены, полученного с выхода счетчика позиций 29. Кроме этого, дешифратор 27 предназначен для подачи по окончании этапа смены позиций со своего второго выхода на первый вход таймера 31 сигнала, несущего информацию о длительности этапа позиционирования после текущего варианта смены позиций, а со своего третьего выхода на второй вход таймера 31 сигнала об окончании этапа смены.
При включении установки блок начальной установки 32 подает со своего выхода на: третий вход таймера 31, второй вход счетчика позиций 29, третий вход счетчика тактовых импульсов 28 кратковременный сигнал сброса. По сигналу сброса счетчик тактовых импульсов 28 обнуляется, а счетчик позиций 29 устанавливается в начальное состояние, например, обнуляется. Дешифратор вариантов смены позиций 27 по состоянию выхода счетчика позиций 29 устанавливает на своем выходе сигнал о номере варианта смены текущей позиции, подаваемый на первый вход дешифратора управляющих воздействий 26. При этом дешифратор вариантов смены позиций 27 на своем втором выходе устанавливает сигнал о длительности этапа позиционирования текущей позиции, поступающий на первый вход таймера 31, который после снятия сигнала сброса начинает отсчет времени этапа позиционирования.
По истечению времени этапа позиционирования текущей позиции таймер 31 с третьего выхода подает на вход генератора тактовых импульсов 30 сигнал, разрешающий его работу. По этому сигналу генератор тактовых импульсов 30 осуществляет с заданным периодом следования подачу тактовых импульсов на второй вход счетчика тактовых импульсов 28. Счетчик тактовых импульсов 28 в течение всего этапа смены позиции осуществляет суммирование тактовых импульсов с генератора 30 и подает сигнал о количестве просуммированных импульсов на второй вход дешифратора управляющих воздействий 26 и на второй вход дешифратора вариантов смены позиций 27.
Дешифратор вариантов смены позиций 27 осуществляет определение момента окончания этапа смены позиции по количеству просуммированных счетчиком 28 импульсов, которые сопоставлены текущему варианту смены. При достижении заданного количества импульсов дешифратор смены позиций 27 подает со своего второго выхода на первый вход таймера 31 информацию о времени отображения текущей позиции, а с третьего выхода второй вход таймера 31 сигнал об окончании этапа смены позиции, по которому таймер 31 начинает отсчет времени этапа позиционирования, снимает с третьего выхода сигнал, разрешающий работу генератора тактовых импульсов 30, а также подает со второго выхода кратковременный сигнал сброса на первый вход счетчика 28, а с первого выхода на вход счетчика позиций 29 сигнал, по которому счетчик 29 изменяет состояние своего выхода с номера предыдущей позиции на номер текущей позиции.
Средство управления может быть выполнено за одно целое с блоками управления приводных средств.
Средство управления и связанные с ним блоки управления двигателями образуют в совокупности устройство регулирования работой рекламной установки, способное управлять в соответствии с предлагаемым изобретением.
Устройство управления в целом может быть реализовано многими способами. Так, например, в нем могут быть дискретные элементы, позволяющие реализовать электронное устройство. Желательно использовать программируемые цифровые компоненты типа микроконтроллера. Устройство управления может быть размещено в специальном блоке, или же наоборот, может быть интегрировано в блок, реализующий одновременно и другие функции управления рекламной установкой.
Сигналы управляющих воздействий на выходе дешифратора управляющих воздействий 26 формируют в соответствии с программой работы установки, соответствующей набору вариантов этапа смены позиций, каждый из которых характеризуется для выбранной группы приводных средств заранее заданным условием, определяющим последовательность подачи сигналов первого типа на момент начала смены выбранной позиции после этапа позиционирования или начала работы установки, а также последовательность подачи сигналов второго типа по завершению этапа смены выбранной позиции.
Программа определяет последовательность подачи управляющих воздействий и задает режимы работы приводных средств.
В программе должно быть заранее установлено соответствие варианта смены позиций кривизне заданного участка и конфигурации рекламного поля и его участков.
Значения длительности этапа смены позиций и угловой скорости вращения поворотных элементов являются изменяемыми параметрами и задаются средством управления, которое выполнено с возможностью изменения как их значения, так и других регулируемых параметров работы приводного средства.
Информация о выбранной угловой скорости поворотных элементов, связанных с тем приводным средством, на который подается соответствующий управляющий сигнал первого типа, а также информация о длительности подаваемых управляющих сигналов предварительно определена для одного (или множества) этапов смены позиций в зависимости от определенного заранее варианта заданного условия (или множества вариантов) этапа смены позиций с учетом постоянного для конкретной рекламной установки параметра, характеризующего положение друг относительно друга в статическом состоянии положения позиционирования сторон двух соседних поворотных элементов, связанных с различными приводными средствами.
В качестве такого параметра выбран параметрический угол ϕ, проиллюстрированный на фиг.2 (для случая выгнутого участка), и фиг.3 (для случая вогнутого участка).
Как показано на фиг.2 и 3 параметрический угол ϕ определяют для каждой пары соседних поворотных элементов 43 и 44, связанных с различными приводными средствами, как угол, лежащий в плоскости сечения, перпендикулярной осям вращения 45 и 46 поворотных элементов. Вершина угла ϕ совпадает с осью 45 (или соответственно 46) вращения поворотного элемента 43 (или 44), одна из сторон проходит через ту крайнюю точку стороны 47 (или 48) поворотного элемента 43 (или 44), на которой демонстрируют рекламное изображение и которая является ближайшей к другому поворотному элементу, а вторая сторона этого угла проходит через дальнюю по отношению к наблюдателю точку пересечения принадлежащих этой же плоскости двух условных окружностей с радиусом R, в одну из которых вписано поперечное сечение поворотного элемента 43, а в другую - поперечное сечение соседнего с ним поворотного элемента 44.
Параметрический угол ϕ (фиг.2 или 3) характеризует зону возможного пересечения соседних поворотных элементов при их вращении и зависит от заранее заданного расстояния Н между осями вращения 45 и 46, которое меньше 2L и выбрано для всех поворотных элементов установки из диапазона, удовлетворяющего условию (1):
где H - расстояние между осями двух соседних поворотных элементов (фиг.2 или 3);
с° - измеряемый со стороны наблюдателя угол между двумя линиями, проходящими через крайние точки тех сторон двух соседних поворотных элементов, на которых демонстрируют рекламное изображение выбранной позиции (фиг.2 или 3);
b - кратчайшее расстояние от линии, соединяющей крайние точки стороны поворотного элемента до оси его вращения (фиг.4), выбираемое из диапазона в соответствии с условием:

где S - толщина стороны поворотного элемента в ее крайней точке (фиг.4),
L - длина отрезка, соединяющего две крайние точки стороны поворотного элемента (фиг.4).
Для выбранного варианта рекламной установки с заданной конфигурацией (т.е. выбранной кривизны участки) рекламного поля параметрический угол, от которого зависят подбираемые параметры для конкретного варианта этапа смены позиций, между каждой парой соседних поворотных элементов можно рассчитать по формуле:

где g - угол (фиг.4), лежащий в плоскости сечения, перпендикулярной осям вращения поворотных элементов, и вершина которого совпадает с осью вращения поворотного элемента, а стороны проходят через две ближайшие друг к другу крайние точки сторон поворотного элемента;

Далее описана модель выбора конкретных задаваемых рабочих параметров работы установки, основанная на том, что при вращении соседних поворотных элементов, связанных с различными приводными средствами, углы поворота в каждой паре соседних поворотных элементов, связанных с различными приводными средствами, подбирают так, чтобы один из поворотных элементов этой пары не заходил в зону их возможного пересечения до тех пор, пока другой из нее не вышел.
При выборе длительности сигнала первого типа можно использовать модель расчета, основанную на том, что значение длительности сигнала первого типа, подаваемого на каждое последующее приводное средство, задают последовательно в зависимости от длительности сигнала первого типа, подаваемого на ближайшее к нему предыдущее приводное средство и угла поворота поворотных элементов, связанных с предыдущим приводным средством на момент подачи управляющих сигналов, соответствующих выбранному заранее заданному условию этапа смены позиций, на последующее приводное средство. Угол поворота при этом выбирают из заранее определенного диапазона.
Метод показан на примерах рекламной установки с трехсторонними призмообразными элементами, для которых заданный угол поворота на этапе смены позиций составляет 120°.
Для каждого заранее заданного условия длительность подачи сигнала первого типа, подаваемого на каждое последующее приводное средство, начиная от первого крайнего (n=1), для которого длительность задают равной заданной длительности этапа смены позиций, рассчитывают согласно подобранному для каждого заранее заданного условия этапа смены позиций с учетом последовательно задаваемого угла поворота (α) поворотных элементов, связанных с (n-1)-приводным средством на момент подачи последовательно подаваемых сигналов соответствующего типа на n-приводное средство, который выбирают из заранее определенного диапазона, зависящего от значений параметрических углов в выбранной группе из m приводных средств, направления вращения поворотных элементов и заранее заданного значения длительности сигнала первого типа (tmin), подаваемого на второе крайнее приводное средство выбранной группы.
Управляющий сигнал первого типа, подаваемый на n-приводное средство несет информацию о направлении вращения поворотных элементов, связанных с n-приводным средством, и задаваемой угловой скорости (ωn), которую для случая равномерного вращения поворотных элементов, рассчитывают по формуле:

где n - присвоенный номер приводного средства, начиная от выбранного первого крайнего, для которого n=1;
tn - длительность подачи сигнала первого типа, подаваемого на n-приводное средство до момента подачи на него сигнала второго типа.
Далее по тексту используют обозначения
tn-1 - длительность подачи сигнала первого типа на (n-1)-приводное средство до момента подачи на него сигнала второго типа;
ϕn-1 - параметрический угол в паре соседних поворотных элементов, один из которых связан с n-приводным средством, а другой с (n-1)-приводным средством;
 - последовательно задаваемый угол поворота поворотного элемента, связанного с (n-1)-приводным средством на момент подачи сигнала первого типа на n-приводное средство;
- последовательно задаваемый угол поворота поворотного элемента, связанного с (n-1)-приводным средством на момент подачи сигнала первого типа на n-приводное средство;
 - последовательно задаваемый угол поворота поворотного элемента, связанного с (n-1)-приводным средством на момент подачи сигнала второго типа на n-приводное средство.
- последовательно задаваемый угол поворота поворотного элемента, связанного с (n-1)-приводным средством на момент подачи сигнала второго типа на n-приводное средство.
Для целей заявленного изобретения понятие направления последовательности подачи управляющих сигналов, совпадающего с направлением вращения поворотных элементов (т.е. видимого со стороны наблюдателя направлением перемещения сторон поворотных элементов), понимается следующим образом: при направлении вращения поворотных элементов по часовой стрелке, если смотреть сверху, последовательность подачи сигналов слева направо считают совпадающей с направлением вращения поворотных элементов, а последовательность подачи сигналов справа налево считают не совпадающей с направлением вращения поворотных элементов.
Ниже описаны условия выбора параметров для различных вариантов воплощения изобретения, отличающихся заранее заданными условиями для этапа смены позиций.
1. Для варианта воплощения изобретения, при котором заранее заданное условие для этапа смены позиций предусматривает подачу сигналов первого типа одновременно, а подачу сигналов второго типа последовательно, длительность подачи сигнала первого типа, подаваемого на каждое последующее приводное средство, начиная от выбранного первого крайнего определяют в соответствии с формулой:

при n=2÷m.
В этом варианте исполнения в выбранной группе, в которой все параметрические углы имеют значение меньше 60°, для случая, когда сигналы второго типа подают в направлении, совпадающим с направлением вращения поворотных элементов, заранее определенный диапазон удовлетворяет условию:

В этом же варианте в выбранной группе, в которой все параметрические углы имеют значение меньше 60°, для случая, когда сигналы второго типа подают в направлении, противоположном направлению вращения поворотных элементов, заранее определенный диапазон удовлетворяет одному из условий в зависимости от значения выбранной длительности подачи сигнала на (n-1)-приводное средство:

или

В этом же варианте заранее заданного условия этапа смены изображения в выбранной группе, в которой, по меньшей мере, один параметрический угол имеет значение больше или равное 60°, сигналы второго типа могут подавать только в направлении, совпадающим с направлением вращения поворотных элементов, причем при формировании выбранной группы учитывают количество параметрических углов, имеющих значение больше или равное 60° и ограничивают выбранную группу таким количеством m, для которых выполняется условие:

где


а заранее определенный диапазон удовлетворяет одному из условий:

или

2. Для варианта воплощения изобретения, при котором заранее заданное условие для этапа смены позиций предусматривает подачу сигналов первого типа последовательно, а подачу сигналов второго типа одновременно, длительность подачи сигнала первого типа, подаваемого на каждое последующее приводное средство определяют в соответствии с формулой:

В этом варианте в выбранной группе, в которой все параметрические углы имеют значение меньше 60°, для случая, когда сигналы первого типа подают в направлении, совпадающим с направлением вращения поворотных элементов, заранее определенный диапазон удовлетворяет условию:

а для случая, когда сигналы первого типа подают в направлении, противоположном направлению вращения поворотных элементов, заранее определенный диапазон одному из условий в зависимости от значения выбранной длительности подачи сигнала на (n-1) приводное средство:

или

В этом варианте смены позиций в выбранной группе, в которой, по меньшей мере, один параметрический угол имеет значение больше или равное 60°, сигналы первого типа подают только в направлении, совпадающим с направлением вращения поворотных элементов, причем при формировании выбранной группы учитывают количество углов, имеющих значение больше или равное 60°, и ограничивают выбранную группу таким количеством m, для которого выполняется условие:
где 

а заранее определенный диапазон удовлетворяет условию:



3. Для варианта воплощения изобретения, при котором заранее заданное условие для этапа смены позиций предусматривает подачу сигналов первого типа последовательно, начиная с выбранного первого крайнего приводного средства, а подачу сигналов второго типа последовательно, начиная со второго крайнего приводного средства, длительность подачи сигнала первого типа, подаваемого на каждое последующее приводное средство, начиная от выбранного крайнего, рассчитывают согласно формуле:

В этом варианте исполнения в выбранной группе, в которой все параметрические углы имеют значение меньше 60°, для случая, когда сигналы первого типа подают в направлении, совпадающим с направлением вращения поворотных элементов, заранее определенный диапазон для α1 n-1 удовлетворяет условию:

а заранее определенный диапазон для  удовлетворяет условию
удовлетворяет условию

В этом варианте исполнения в выбранной группе, в которой все параметрические углы имеют значение меньше 60°, для случая, когда сигналы первого типа подают в направлении, противоположном направлению вращения поворотных элементов, заранее определенный диапазон для  удовлетворяет условию:
удовлетворяет условию:

а заранее определенный диапазон для одному из условий в зависимости от выбранного :

или

В этом же варианте в выбранной группе, в которой, по меньшей мере, один параметрический угол имеет значение больше или равное 60°, при формировании выбранной группы учитывают количество углов, имеющих значение больше или равных 60°, и ограничивают выбранную группу таким количеством m, для которых выполняется условие:
где 

При этом для случая, когда сигналы первого типа подают в направлении, совпадающим с направлением вращения поворотных элементов, заранее определенный диапазон для удовлетворяет условию:

а заранее определенный диапазон для удовлетворяет условию:

В этом же варианте исполнения в выбранной группе, в которой, по меньшей мере, один параметрический угол имеет значение больше или равное 60°, для случая, когда сигналы первого типа подают в направлении, противоположном направлению вращения поворотных элементов заранее определенный диапазон для удовлетворяет условию:

а заранее определенный диапазон для удовлетворяет условию

Вышеописанный подход проиллюстрирован на примерах рекламной установки с трехсторонними призмообразными элементами, для которых заданный угол поворота на этапе смены позиций составляет 120°, а вращение поворотных элементов при этом происходит от первого выбранного угла, равного 0°, до второго выбранного угла, равного 120°.
Заранее заданное условие этапа смены позиций может предусматривать задаваемые значения первого выбранного угла, отличными от нуля, а значение второго выбранного угла, отличным от 120°.
В случае, когда первый выбранный угол имеет значение меньше параметрического угла ϕ, а второй выбранный угол имеет значение больше (120-ϕ)°, в каждой паре поворотных элементов, связанных с различными приводными средствами, при совпадении направления вращения поворотных элементов с направлением последовательности подачи сигналов первого типа, угол поворота поворотного элемента, связанного с предыдущим по подаче сигнала приводным средством, должен превышать соответствующий параметрический угол ϕ в момент поворота поворотного элемента, связанного с последующим по подаче сигнала приводным средством на угол (120-ϕ)°, а при не совпадающем направлении вращения поворотных элементов с направлением последовательности подачи сигналов первого типа, угол поворота поворотного элемента, связанного с предыдущим по подаче сигнала приводным средством должен быть меньше, чем угол (120-ϕ)° в момент поворота поворотного элемента, связанного с последующим по подаче сигнала приводным средством на угол ϕ.
Если в выбранной группе приводных средств первый выбранный угол превышает параметрический или второй выбранный угол меньше, чем (120-ϕ)°, то скорость вращения поворотных элементов, длительность сигнала первого типа и моменты подачи сигналов первого и второго типов осуществляют для каждого приводного средства независимо от скорости вращения, длительности и моментов подачи сигналов первого и второго типов, подаваемых на соседнее с ним приводное средство.
Последовательная подача сигналов любого типа позволяет реализовать широко применяемый при рекламировании на динамических рекламных установках прием этапа смены позиций по типу «бегущей волны».
Ниже приводятся примеры настоящего изобретения, хотя изобретение ими не ограничивается.
Примеры для иллюстрации изобретения даны с привлечением фиг.1 и таблиц, в которых используют обозначения:
ПС - приводное средство,
ПЭ - поворотный элемент,
t,c- длительность сигнала первого типа, подаваемого на соответствующее приводное средство в течение всего этапа смены позиций.
Скорость - угловая скорость вращения соответствующего поворотного элемента (град/сек).
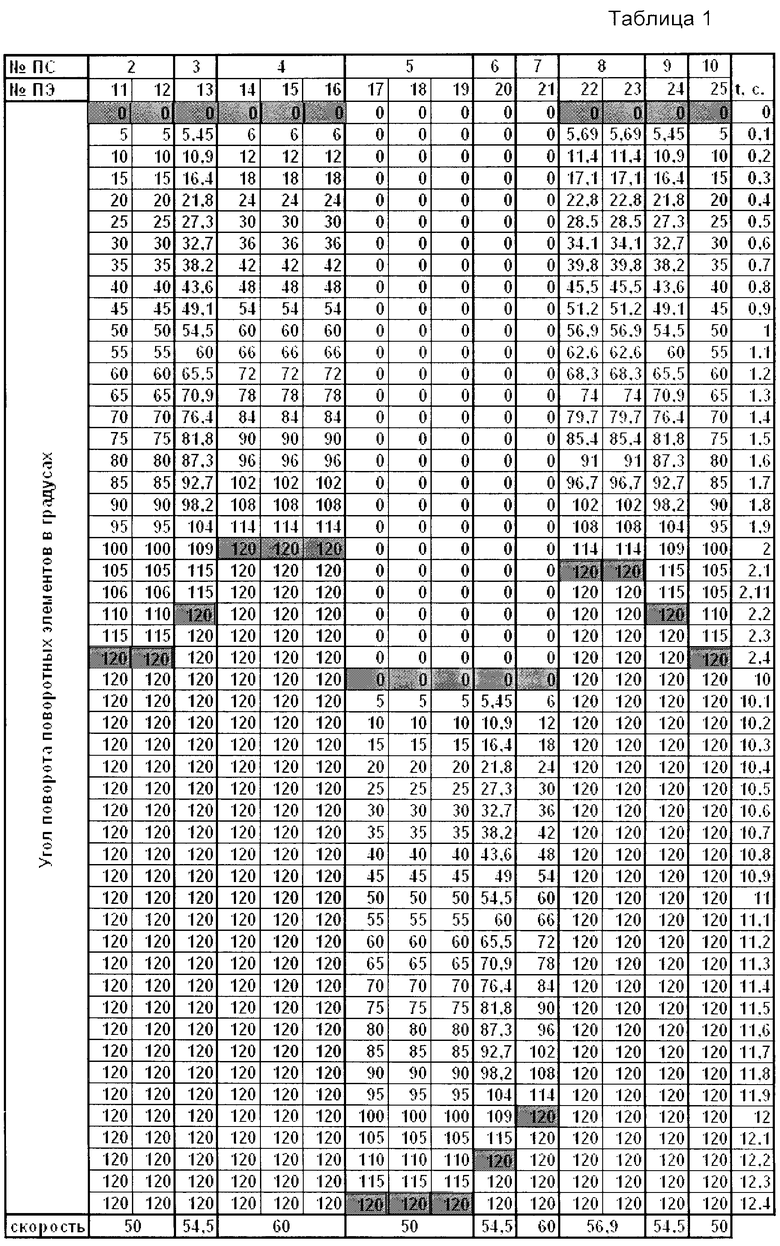
ПРИМЕР 1.
Представлен этап смены позиций по варианту 1, при котором заранее заданное условие для этапа смены позиций предусматривает подачу сигналов первого типа одновременно, а подачу сигналов второго типа последовательно.
Рекламное поле в данном воплощении представляет собой три участка, каждый из одной выбранной группы, при этом в каждой выбранной группе все параметрические углы ϕ меньше 60°.
Первая группа включает приводные средства ПС 2 - ПС 4 (m=3), вторая - ПС 5 - ПС 7 (m=3), а третья ПС 8 - ПС 9 (m=3). В первой группе назначают выбранным первым крайним приводным средством ПС 2 с присвоением ему номера n=1, для которого длительность подачи сигналов первого типа задают, равным 2,4 сек. Для второго крайнего приводного средства первой группы ПС 4 длительность подачи сигналов первого типа задают равным 2,0 сек.
Во второй группе назначают выбранным первым крайним приводным средством ПС 5 с присвоением ему номера n=1, для которого длительность подачи сигналов первого типа задают равным 2,4 сек. Для второго крайнего приводного средства второй группы ПС 7 длительность подачи сигналов первого типа задают равным 2,0 сек.
В третьей группе назначают выбранным первым крайним приводным средством ПС 10 с присвоением ему номера n=1, для которого длительность подачи сигналов первого типа задают равным, 2,4 сек. Для второго крайнего приводного средства третьей группы ПС 10 длительность подачи сигналов первого типа задают равным 2,11 сек.
Для ПС первой группы скорость вращения и длительность подачи сигналов первого типа рассчитывают согласно формулам (4) и (5) соответственно, при этом последовательно задают угол поворота(α) поворотных элементов, начиная с ПС 3 (n=2) приводного средства по ПС 4 выбирая его из заранее определенного диапазона согласно условию (6).
В первой группе направление последовательности подачи сигналов второго типа совпадает с направлением вращения поворотных элементов.
Для приводных средств второй группы вращения и длительность подачи сигналов первого типа рассчитывали согласно формулам соответственно (4) и (5), а угол поворота (α) поворотных элементов, начиная с ПС 6 (n=2) по ПС 7 выбирали из заранее определенного диапазона согласно условию (6).
Bj второй группе направление последовательности подачи сигналов второго типа совпадает с направлением вращения поворотных элементов
Для ПС 8 - ПС 10 скорость вращения и длительность подачи сигналов первого типа рассчитывали согласно формулам (4) и (5) соответственно, а угол поворота (α) поворотных элементов, начиная с ПС 9 (n=2) по восьмое (n=3) выбирали из заранее определенного диапазона согласно условиям (7) и (8).
В третьей группе направление последовательности подачи сигналов второго типа противоположно направлению вращения поворотных элементов.
Смена позиций на втором участке (т.е. во второй группе ПС) начинают через 10 сек после окончания смены позиций на первом (вторая выбранная группа ПС) и третьем (третья выбранная группа ПС) участках.
Результаты расчетов приведены в Таблице 1.
Вариант смены позиций в соответствии с примером 1 происходит на всех участках по типу «появляющихся бегущих волн».
ПРИМЕР 2.
Показан этап смены позиций по варианту, при котором заранее заданное условие предусматривает подачу сигналов первого типа последовательно, а подачу сигналов второго типа одновременно.
Рекламное поле в данном воплощении представляет собой один участок из двух выбранных групп, в каждой из которых параметрический угол ϕ меньше 60°.
Первая группа включает ПС 2 - ПС 5, а вторая ПС 6 - ПС 10.
В первой группе назначают выбранным первым крайним приводным средством ПС 5 с присвоением ему номера n=1, для которого длительность подачи сигналов первого типа задают равным 2,4 сек. Для второго крайнего приводного средства первой группы ПС 2 длительность подачи сигналов первого типа задают равным 2,1 сек. Для ПС 2 - ПС 5 скорость вращения и длительность подачи сигналов первого типа рассчитывали согласно формулам соответственно (4) и (12), а угол поворота (α) поворотных элементов, начиная с ПС 4 (n=2) по ПС 2 (n=4), выбран из заранее определенного диапазона согласно условию (13).
В первой группе направление последовательности подачи сигналов первого типа совпадает с направлением вращения поворотных элементов.
Во второй группе назначают выбранным первым крайним приводным средством ПС 6 с присвоением ему номера n=1, для которого длительность подачи сигналов первого типа задают равным также 2,4 сек. Для второго крайнего приводного средства второй группы ПС 10 длительность подачи сигналов первого типа задают равным 1,95 сек. Для ПС 6 - ПС 10 скорость вращения и длительность подачи сигналов первого типа рассчитывают согласно формулам (4) и (12) соответственно, а угол поворота (α) поворотных элементов, начиная с приводного ПС 7 (n=2) по ПС 10 (n=5) выбран из заранее определенного диапазона согласно условиям (14) и (15).
Во второй группе направление последовательности подачи сигналов первого типа противоположно направлению вращения поворотных элементов.
Результаты расчетов приведены в Таблице 2.
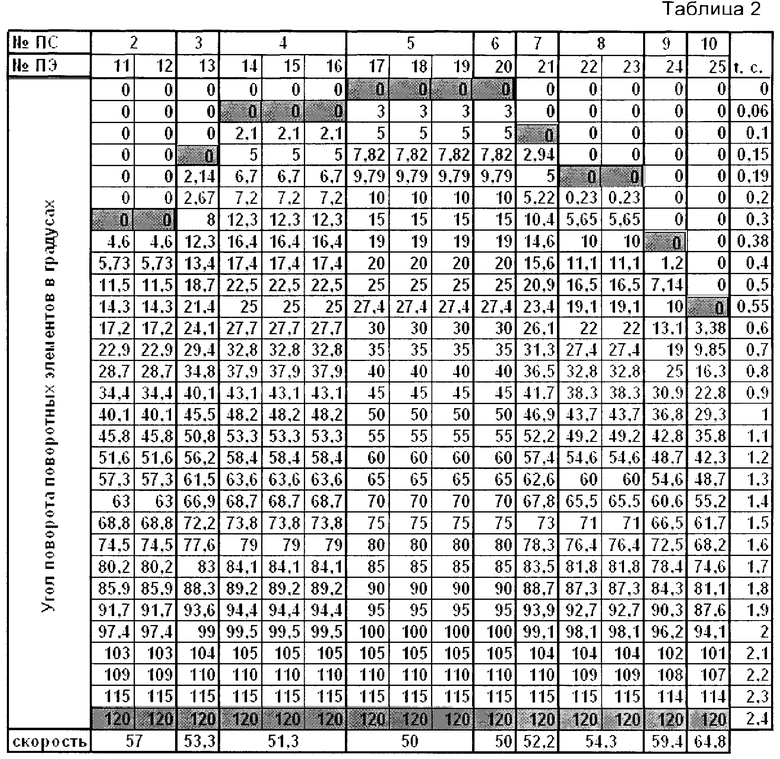
Вариант смены позиций в соответствии с Примером 2 происходит в каждой выбранной группе по типу, интерпретируемому как «исчезающая бегущая волна». При этом на участке рекламного поля при смене позиций формируется рисунок из двух разнонаправленных «исчезающих бегущих волн».
Предлагаемый способ комбинацией выбранных групп, вариантов заранее заданных условий и выбранных первых крайних приводных средств для каждой выбранной группы позволяет осуществлять множество вариантов этапов смены позиций с формированием на каждом этапе смены позиций своего «динамического рисунка».
Кроме предлагаемого метода расчета возможно задание конкретных необходимых параметров для осуществления изобретения эмпирически, что легче всего делается для, по существу, прямолинейных участков. Возможно также использовать другой метод, например, при котором номера приводных средств для расчета задаются не последовательно, а произвольным образом, при этом длительность подаваемых управляющих сигналов, скорость вращения поворотных элементов, угол поворота поворотного элемента, связанного с (n-1)-приводным средством на момент подачи сигнала первого типа на n-приводное средство, а также угол поворота поворотного элемента, связанного с (n-1)-приводным средством на момент подачи сигнала второго типа на n-приводное средство для поворотных элементов, связанных с любым n-приводным средством рассчитывают по другим, но более громоздким формулам, с учетом уже ранее рассчитанных значений аналогичных величин.
Каждый пример иллюстрирует один этап смены позиций и кроме того возможно их осуществление на различных этапах смены, например, последовательно друг за другом, что обеспечивается средством управления в соответствии с задаваемой программой управления.
Очевидно, что средство управления может быть выполнено так, что могут использоваться все возможные для выбранной группы варианты смены позиций в какой-то задаваемой последовательности из набора условий.
Возможно средство управления выполнить так, что две или больше следующих друг за другом позиций будут осуществлять с использованием отличающихся друг от друга или одинаковыми заранее заданными условиями, но выбранные группы будут иметь другое количество приводных средств.
Предлагаемое изобретение позволяет значительно расширить функциональные возможности рекламных установок, увеличить количество приемов, используемых для этапов смены изображения на динамических рекламных установках, и особенно хорошо приспособлено для широко используемых в настоящее время больших рекламно-информационных полей различной конфигурации, составленных из многих модулей, а также для рекламных установок с индивидуальными приводными средствами для каждого поворотного элемента.
Реализация устройства и способа в соответствии с предлагаемым изобретением является особенно простой вследствие того, что необходимая модель выбора параметров является достаточно простой и удобной для рекламного поля любой конфигурации, что обеспечивает возможности проектирования и изготовления устройств с расширенными возможностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕКЛАМИРОВАНИЯ И РЕКЛАМНАЯ УСТАНОВКА | 2006 |
|
RU2333542C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2351054C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2351053C2 |
| РЕКЛАМНО-ИНФОРМАЦИОННЫЙ СТЕНД | 2004 |
|
RU2267165C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2008 |
|
RU2396675C1 |
| РЕКЛАМНО-ДЕМОНСТРАЦИОННОЕ УСТРОЙСТВО (ВАРИАНТЫ) И СПОСОБ ДЕМОНСТРАЦИИ РЕКЛАМНЫХ МАТЕРИАЛОВ | 2007 |
|
RU2372669C2 |
| РЕКЛАМНЫЙ ЩИТ | 2002 |
|
RU2234144C1 |
| РЕКЛАМНАЯ УСТАНОВКА | 2004 |
|
RU2267816C1 |
| РЕКЛАМНАЯ УСТАНОВКА | 2003 |
|
RU2263977C2 |
| СПОСОБ ТЕЛЕВИЗИОННОЙ ИГРЫ ДЛЯ УМЕНЬШЕНИЯ УХОДОВ ЗРИТЕЛЕЙ ОТ ПРОСМОТРА ТЕЛЕВИЗИОННОЙ РЕКЛАМЫ (ВАРИАНТЫ) | 2000 |
|
RU2190446C2 |
Рекламное поле образовано фрагментами рекламно-информационного изображения, размещенными на предварительно определенных в соответствии с выбранными позициями сторонах поворотных элементов с возможностью вращения каждого из них вокруг своей оси. Средством управления задаются значения длительности этапа смены позиций и угловой скорости вращения поворотных элементов на, по меньшей мере, одном заданном участке. На этапе смены позиций в, по меньшей мере, одной выбранной группе соседних приводных средств заданного участка, имеющей первое и второе крайние приводные средства, при повороте поворотных элементов от первого выбранного угла до второго выбранного угла длительность сигнала, обеспечивающего вращение поворотных элементов, подаваемого на каждое последующее приводное средство, начиная от выбранного первого крайнего приводного средства, последовательно уменьшают. Вращение поворотных элементов, связанных с различными приводными средствами, осуществляют с отличающимися друг от друга значениями угловых скоростей. Группа изобретений обеспечивает результат, заключающийся в получении множества вариантов динамической смены изображения с формированием на каждом этапе смены позиции своего динамического рисунка. 2 н. и 44 з.п. ф-лы, 4 ил., 2 табл.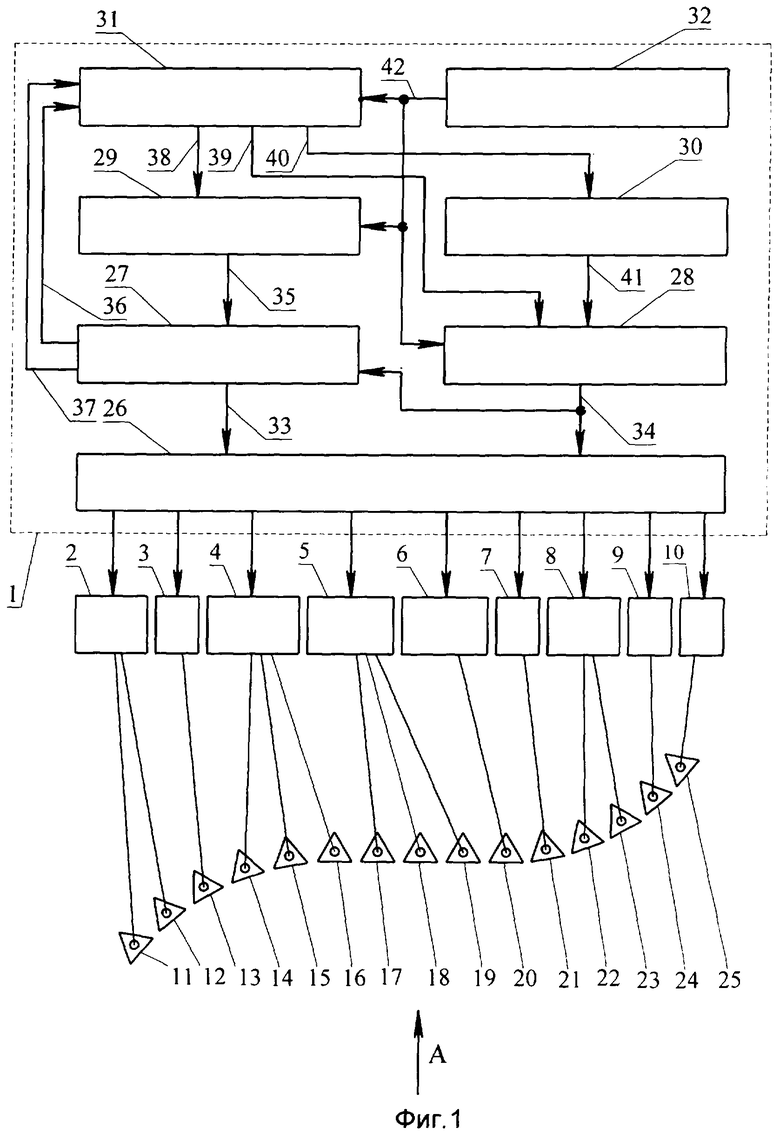

где Н - расстояние между осями двух соседних поворотных элементов,
с° - измеряемый со стороны наблюдателя угол между двумя линиями, проходящими через крайние точки тех сторон двух соседних поворотных элементов, на которых демонстрируют рекламное изображение выбранной позиции,
b - кратчайшее расстояние от линии, соединяющей крайние точки стороны поворотного элемента до оси его вращения, выбираемое из диапазона:

где S - толщина стороны в ее крайней точке,
L - длина отрезка, соединяющего две крайние точки стороны поворотного элемента.
| RU 2002109110 A, 20.12.2003 | |||
| СПОСОБ ДЕМОНСТРАЦИИ ИНФОРМАЦИОННЫХ ПОЛЕЙ | 2002 |
|
RU2230374C2 |
| РЕКЛАМНАЯ УСТАНОВКА (ВАРИАНТЫ) | 2000 |
|
RU2165649C1 |
| US 5562459 A, 08.10.1996 | |||
| US 5806221 A, 15.09.1998 | |||
| US 4638580 A, 27.01.1987. | |||

