Изобретение относится к области приборостроения и может быть использовано при создании бесплатформенных инерциальных навигационных систем (БИНС).
В настоящее время известен способ построения бесплатформенного инерциального блока (БИБ) в кардановом подвесе (Патент на изобретение №2241959 с приоритетом от 20.05.03 г.). Известен способ калибровки чувствительных элементов (ЧЭ), при стендовых испытаниях (У.Ригли, У.Холлистер, У.Денхард, «Теория, проектирование и испытания гироскопов», М., Мир, 1972 г.), принятый за прототип. Недостатком известного способа калибровки ЧЭ БИНС на специальных стендах является отсутствие возможности их калибровки без снятия с изделия.
Задачей настоящего изобретения является повышение точностных характеристик ЧЭ БИБ путем их уточненной калибровки без снятия с изделия.
Проведенные исследования показывают, что при построении БИНС по классической схеме жесткого крепления блока акселерометров и датчиков угловой скорости (ДУС) на изделии обеспечить требуемые точностные характеристики инерциальной системы управления (ИСУ) в настоящее время не представляется возможным. Это связано с тем, что имеющаяся элементная база, то есть акселерометры и ДУСы, без предварительной (уточненной) калибровки перед началом работы не обладает требуемыми точностными характеристиками в заданных диапазонах изменения измеряемых величин. Калибровка основных параметров ЧЭ БИБ перед началом работы может в значительной степени улучшить точностные характеристики ИСУ.
Задачей заявленного изобретения является определение (уточнение) следующих параметров калибровки ЧЭ:
для акселерометров:
- смещение нуля и масштабный коэффициент (цена импульса сигнала акселерометра),
для датчиков угловой скорости:
- скорость ухода (смещение («дрейф») нуля) и масштабный коэффициент (цена импульса сигнала ДУСа).
В процессе уточненной калибровки определяют значения параметров калибровки для последующего их учета в алгоритмах системы управления (начальная калибровка ЧЭ производится при их изготовлении).
При жестком креплении ЧЭ на изделии возможность их калибровки может быть обеспечена на специальном стенде до постановки на изделие. ЧЭ, жестко закрепленные на изделии, калибровать не представляется возможным.
Предлагаемый способ калибровки ЧЭ БИНС и устройство для его осуществления дает возможность калибровать все ЧЭ при использовании двухосного карданова подвеса БИБ и при специальном расположении измерительных осей (ИО) ЧЭ относительно осей двухосного карданова подвеса.
Для пояснения работы используются следующие обозначения.
Правые прямоугольные системы координат:
XYZ - горизонтальная система координат; ось Y направлена по направлению вертикали; оси Х и Z расположены в плоскости горизонта;
OX1Y1Z1 - система координат, связанная с управляемым объектом.
ХдYдZд - система координат, образованная соответствующими измерительными осями ДУСов.
XaYaZa - система координат, образованная соответствующими измерительными осями акселерометров.
На фиг.1 представлено устройство, осуществляющее заявленный способ калибровки.
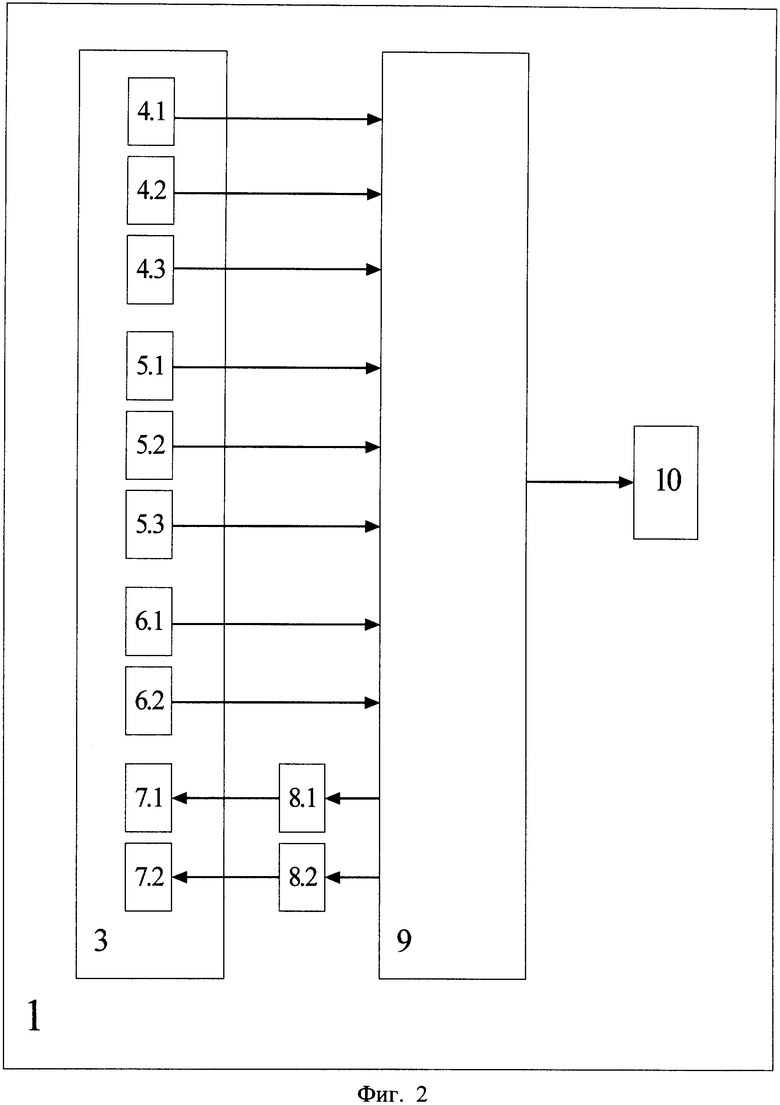
На фиг.2 представлена связь между элементами заявленного устройства.
Наиболее предпочтительной в настоящее время представляется схема расположения трех акселерометров (4.1, 4.2, 4.3) и трех ДУСов (5.1, 5.2, 5.3), приведенная на фиг.1, где показано начальное исходное положение, при котором все используемые системы координат вместе с объектом развернуты вокруг оси Z относительно горизонтальной системы координат на угол μ. Внутренняя ось карданова подвеса выставлена в плоскость горизонта. Система координат XaYaZa развернута вокруг оси Ya от внутренней оси карданова подвеса на конструктивный угол Ф3=45°. Показания датчиков углов, установленных на осях карданова подвеса, соответствуют нулевому значению углов Ф1=Ф2=0.
На наружной оси двухосного подвеса установлен датчик угла ДУ1 (6.1) и двигатель вращения Д1 (7.1), наружная ось совпадает с осью X1, на внутренней оси карданова подвеса установлен датчик угла ДУ2 (6.2) и двигатель вращения Д2 (7.2), внутренняя ось карданова подвеса совпадает с осью Z. На корпусе объекта (1) установлены усилители (8.1 и 8.2) сигналов, поступающих от вычислительного устройства (9) на двигатели вращения, и потребитель параметров калибровки (10). В показанном на фиг.1 исходном нулевом положении приборной площадки сигналы с датчиков углов ДУ1 и ДУ2 равны нулю.
Предлагаемая на фиг.1 схема расположения ЧЭ позволяет, при конструктивно заданном угле Ф3=45° и отклонении наружной оси карданова подвеса от плоскости горизонта на угол μ в диапазоне ±45°, путем разворота блока ЧЭ на углы Ф1 и Ф2 соответственно вокруг наружной и внутренней осей карданова подвеса обеспечить выставку ИО каждого из трех акселерометров как по положительному, так и по отрицательному направлениям вектора ускорения силы тяжести. Значения углов Ф1 и Ф2 в зависимости от угла μ для выставки ИО каждого акселерометра по положительному и отрицательному направлениям вектора ускорения силы тяжести определяют по конечным формулам в вычислительном устройстве (ВУ) из условия, что направляющие косинусы между измерительной осью калибруемого акселерометра и вертикалью в месте калибровки равны плюс или минус единице.
Способ калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы, установленной в корпусе управляемого объекта, заключается в измерении вектора ускорения силы тяжести (измерении проекций вектора ускорения силы тяжести на измерительные оси акселерометров) и углов поворота приборной площадки (ПП), на которой установлены акселерометры и датчики угловой скорости (ДУС). Для калибровки акселерометров и ДУСов ПП устанавливают в двухосный карданов подвес (КП), на каждой оси которого устанавливают датчик угла и двигатель вращения. ДУСы и акселерометры устанавливают на ПП таким образом, что их измерительные оси (ИО) образуют соответствующие правые прямоугольные системы координат ХдYдZд и XaYaZa, при этом ИО Yа и Yд ортогональны внутренней оси КП. Система XaYaZa развернута вокруг оси Yа от внутренней оси КП на конструктивный угол Ф3=45° таким образом, что ИО Za образует угол 45° с внутренней осью КП и лежит с ней в плоскости ПП. Ось Zд параллельна внутренней оси КП. Развороты на требуемые углы осуществляют с помощью двигателей Д1 и Д2, а контролируют текущие значения углов с помощью сигналов, снимаемых с датчиков углов ДУ1 и ДУ2. Перед началом калибровки по равенству сигналов с акселерометров, измерительные оси (Ха и Za) которых лежат в плоскости ПП, с помощью двигателя вращения, установленного на наружной оси КП, выставляют приборную площадку в начальное исходное положение, при котором внутренняя ось подвеса будет располагаться в плоскости горизонта. По сигналам с датчика угла ДУ1, установленного на наружной оси КП, фиксируют это положение в ВУ как начальное исходное. По сигналам с акселерометра, ИО которого ортогональна внутренней оси и сигналам с датчика угла ДУ2, установленного на внутренней оси карданова подвеса в ВУ, определяют угол μ отклонения наружной оси КП от плоскости горизонта. Для этого приборную площадку (ПП) разворачивают от начального исходного положения вокруг внутренней оси КП на некоторой угол ΔФ2, при котором измерительная ось акселерометра Yа будет отклонена от плоскости горизонта на малый угол, при котором точность определения этого угла практически не зависит от ошибки масштабного коэффициента акселерометра, измеряют по сигналам акселерометра Ya величину этого малого угла, определяют по сигналам с датчика угла ДУ2 значение угла разворота ΔФ2, а затем в ВУ определяют значение угла μ. Калибровка акселерометров проводится следующим образом: в ВУ для каждого акселерометра рассчитывают углы Ф1 и Ф2 поворотов ПП из исходного положения в положения калибровки, в которых ИО калибруемого акселерометра установлена вдоль положительного, затем вдоль отрицательного направления ускорения силы тяжести g, приборную площадку по сигналам, формируемым в ВУ, с помощью двигателей Д1 и Д2 разворачивают относительно исходного положения на углы Ф1 и Ф2 в положения калибровки акселерометров, при этом удерживают с помощью двигателей вращения калибруемые акселерометры в положениях калибровки в течение заданных в ВУ интервалов времени, в течение которых выполняют измерения калибруемым акселерометром. На основе полученных результатов измерений в ВУ рассчитывают значение масштабного коэффициента и смещение нуля каждого калибруемого акселерометра.
В частности, для расчета параметров калибровки можно измерить количества импульсов с выхода калибруемого акселерометра за заданные интервалы времени и на основе полученных данных осуществить в ВУ расчет масштабного коэффициента и смещение нуля акселерометра.
Для проведения калибровки ДУСы располагают следующим образом: для первого и второго ДУСа соответствующие ИО ХД и YД совмещают с направлением наружной оси карданова подвеса, для третьего ДУСа ИО ZД конструктивно выставлена параллельно внутренней оси подвеса. (В идеальном исходном положении первый и третий ДУСы находятся в положениях калибровки. ИО второго ДУСа выставляют в положение калибровки путем разворота ПП вокруг внутренней оси на угол Ф2=-90° от исходного положения.)
Калибровка ДУСов проводится следующим образом: выставляют ПП в исходное положение. Выполняют измерения углового положения осей карданова подвеса относительно плоскости горизонта и их азимут (азимут наружной оси подвеса можно определить, например, методом векторного согласования (патент №2279635 от 02.11.2004 г.)), на основе которых рассчитывают в ВУ проекции угловой скорости вращения Земли на оси карданова подвеса. По сигналам с ВУ двигателем Д2 совмещают ИО ХД и YД соответствующих ДУСов с направлением наружной оси КП, при указанных совмещениях, с помощью двигателя Д1, поворачивают ПП с заданными угловыми скоростями вокруг наружной оси подвеса на заданный положительный, а затем отрицательный угол, при этом за время поворотов выполняют измерения датчиком угла ДУ1 (измеряют фактические положительный и отрицательный углы поворотов ПП, значения которых принимаются за эталонные) и калибруемым ДУСом определяют проекции вектора поворота ПП в результате вращения Земли на ИО калибруемого ДУСа, на основе полученных результатов измерений в ВУ, с учетом вращения Земли, рассчитывают значения масштабных коэффициентов и смещение («дрейф») нуля для первого и второго ДУСа. Аналогичным способом осуществляют калибровку третьего ДУСа. При этом ПП с помощью двигателя Д2 поворачивают вокруг внутренней оси карданова подвеса, при этом за время поворотов выполняют измерения третьим ДУСом и датчиком угла Д2, на основе полученных результатов измерений в ВУ, с учетом вращения Земли, рассчитывают значения масштабного коэффициента и смещение нуля третьего ДУСа.
В частности, для расчета параметров калибровки можно измерить количества импульсов, поступивших с калибруемого ДУСа за времена разворота ПП на соответствующие заданные углы, измерить датчиком угла фактические углы разворотов ПП, значения которых принимают за эталонные, и на основе полученных данных, с учетом вращения Земли, выполнить в ВУ расчет масштабного коэффициента и смещение нуля ДУСа.
Заявленный способ калибровки осуществляется с помощью устройства для калибровки чувствительных элементов бесплатформенной инерциальной навигационной системы, установленной в корпусе управляемого объекта, содержащего приборную площадку (ПП) с тремя акселерометрами и тремя датчиками угловой скорости (ДУС), и вычислительное устройство, входами связанное с соответствующими выходами акселерометров и ДУСов, а выходами связанное с входами потребителей навигационных параметров, двухосный карданов подвес (КП), на каждой оси которого установлены соответствующие датчик угла и двигатель вращения. При этом приборная площадка установлена в КП, ДУСы и акселерометры установлены на ПП таким образом, что их измерительные оси (ИО) образуют соответствующие правые прямоугольные системы координат ХдYдZд и XaYaZa. ИО Ya и Yд сонаправлены друг другу и ортогональны внутренней оси карданова подвеса, ИО Za образует угол 45° с внутренней осью карданова подвеса и лежит с ней в плоскости ПП, а ИО 2д параллельна внутренней оси карданова подвеса. Вычислительное устройство выполнено с дополнительной возможностью управления двигателями вращения и контроля углового положения ПП посредством датчиков угла, расчета масштабного коэффициента и смещения нуля калибруемого чувствительного элемента. Выходы ДУ1 и ДУ2 соединены с соответствующими дополнительными входами (входами сигналов с датчиков угла) вычислительного устройства, два дополнительных выхода которого через усилители соединены с соответствующими входами двигателей вращения, а третий дополнительный выход соединен с входом потребителя параметров калибровки.
Особенностью предлагаемого способа калибровки и устройства для его осуществления является:
1. Возможность калибровки ЧЭ БИБ без снятия с изделия.
2. Специальная схема расположения ЧЭ БИБ в двухосном кардановом подвесе, позволяющая проводить калибровку масштабных коэффициентов и смещение нуля всех трех акселерометров, а также масштабных коэффициентов и дрейфа ухода всех трех ДУСов.
3. Возможность определения перед началом калибровки начального исходного положения блока БИБ относительно плоскости горизонта по сигналам акселерометров БИБ и начального положения БИБ относительно корпуса объекта по сигналам датчиков углов, установленных на осях карданова подвеса.
4. Возможность выставки ИО акселерометров по положительному и отрицательному направлению вектора ускорения силы тяжести путем разворота приборной площадки БИБ вокруг осей карданова подвеса на конечные углы, определяемые в вычислительном устройстве в зависимости от угла отклонения наружной оси карданова подвеса от плоскости горизонта.
5. Определение масштабных коэффициентов и «дрейфа» ДУСов путем совместной обработки в вычислительном устройстве сигналов с ДУСов и сравнения полученной информации с угловой информацией, полученной в результате обработки сигналов с датчиков углов, установленных на осях карданова подвеса.
Техническим результатом предлагаемого способа калибровки и устройства для его осуществления является повышение точности бесплатформенной инерциальной системы управления подвижного объекта и возможность калибровки ЧЭ БИНС без снятия с изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ В ПОЛЕТЕ | 2012 |
|
RU2486472C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2004 |
|
RU2279635C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
Изобретение относится к области приборостроения и может быть использовано при создании бесплатформенных инерциальных систем управления (БИНС) для калибровки чувствительных элементов (ЧЭ). Технический результат - повышение точности. Для достижения данного результата в двухосном кардановом подвесе (КП) устанавливают приборную площадку, на которой специальным образом располагают три акселерометра и три датчика угловой скорости (ДУС). На осях КП устанавливают датчики угла (ДУ) и двигатели для выставки ИО акселерометров и ДУСов в рабочие положения для калибровки. При этом в устройстве для реализации способа в двухосный КП устанавливают приборную площадку (ПП), на которой располагают три акселерометра и три ДУСа. На осях КП устанавливают ДУ и двигатели для вращения ПП относительно объекта. 2 н.п. ф-лы, 2 ил.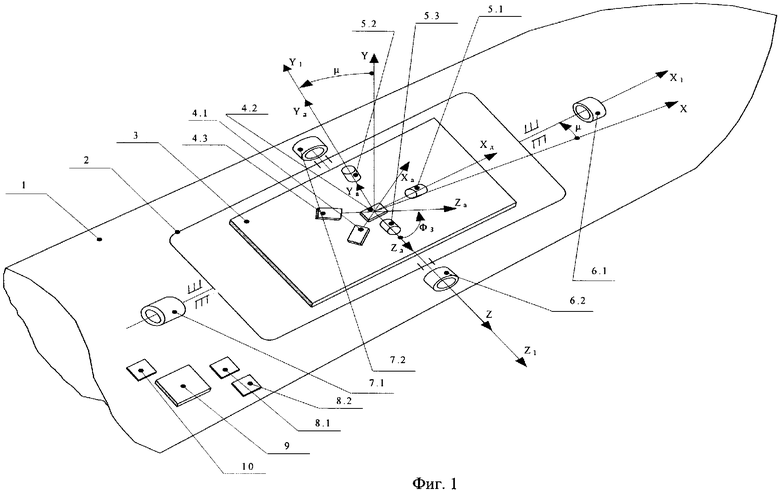
| РИГЛИ У., ХОЛЛИСТЕР У., ДЕНХАРД У | |||
| Теория, проектирование и испытания гироскопов | |||
| - М.: Мир, 1972, с.234 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| Ривкин С.С.и др | |||
| Определение параметров ориентации объекта бесплатформенной инерциальной системой | |||
| - СПб.: ГНЦ РФ - ЦНИИ "Электроприбор", 1996, с.30-32 | |||
| RU 2059205 С1, 27.04.1996 | |||
| Никитин Н.Н | |||
| Курс теоретической | |||

