Предлагаемый способ относится к области приборостроения и может быть использован при разработке бесплатформенных инерциальных навигационных систем (БИНС) для решения задач управления доводочных ступеней (ДС) различного назначения.
Классическая схема построения БИНС предполагает жесткое крепление бесплатформенного инерциального блока (БИБ) непосредственно на корпусе ДС.
При управлении движением ДС с использованием БИНС значительную часть погрешностей составляют погрешности чувствительных элементов (ЧЭ) БИБ.
Проблема существенного повышения точности БИНС может решиться путем калибровки ЧЭ БИБ на разных этапах жизненного цикла: изготовление и сборка БИНС, сдача изделия в эксплуатацию, проведение регламентных проверок, предполетная (предстартовая) подготовка, полет ДС с БИНС на носителе. Каждый из этапов отличается как условиями функционирования БИНС, так и технологическими средствами и приемами, которые могут быть использованы для калибровки ее ЧЭ.
Решающим фактором при определении необходимости и времени (этапа) проведения калибровки данного параметра ЧЭ является зависимость его значения от времени, температуры, перегрузки и других условии эксплуатации БИНС. Если значение параметра стабильно, то его калибровку достаточно проводить в производственных условиях. Если значение параметров нестабильно, то его калибровку желательно проводить в последнем запуске непосредственно перед стартом или во время полета изделия.
В процессе калибровки определяется текущее значение измеряемого параметра (масштабный коэффициент, углы выставки) или, если измеряемый параметр рассматривается как погрешность прибора, то определяется систематическая составляющая погрешности для последующей ее компенсации алгоритмическими методами во время полета. При проведении калибровки могут быть использованы как прямые, так и косвенные методы определения калибруемых параметров.
Известны способы калибровки чувствительных элементов (ЧЭ) при стендовых испытаниях (У.Ригли, У.Холлистер, У.Денхард «Теория, проектирование и испытания гироскопов» изд. Мир, М., 1972 г); И.Е.Виноградов, И.В.Гусев, А.И.Глазков «Определение калибровочных параметров инерциальных измерительных блоков (ИИБ) с помощью трехосного поворотного стола» труды «ФГУП НПЦАП» «Системы и приборы управления» №2(8) 2009 г. и др. Недостатком этих способов является отсутствие возможности калибровки ЧЭ без снятия их с изделия.
Известен «Способ калибровки ЧЭ БИНС и устройство для его осуществления» без снятия БИБ с изделия. Патент на изобретение №2334947 приоритет от 26.03.2007 г. авторы Ф.И.Макарченко, С.А.Зайцев, А.И.Калинин, Г.Н.Румянцев. Недостатком данного способа является увеличение веса и габаритов БИБ вследствие использования двухосного карданова подвеса для выставки измерительных осей калибруемых акселерометров по положительному и отрицательному направлению вектора ускорения силы тяжести в месте проведения калибровки и для выставки измерительных осей калибруемых датчиков угловой скорости вдоль соответствующей оси карданова подвеса для калибровки ДУСов. Однако этот недостаток компенсируется существенным повышением точности БИНС.
Задачей предлагаемого способа калибровки является уточнение в полете смещений нулей и значений масштабных коэффициентов чувствительных элементов (ЧЭ) (акселерометров и ДУСов) инерциального измерительного блока (ИИБ), жестко закрепленного на изделии.
Уточнение калибруемых параметров в полете основано на сравнении информации о векторе кажущейся скорости и векторе углов поворота изделия, полученной от чувствительных элементов инерциальных измерительных блоков БИНС, с информацией о векторе кажущейся скорости и векторе углов поворота изделия, полученной в полете на том же интервале времени от комплекса командных приборов системы управления носителя, которая является, в данном случае, эталоном.
Предлагаемый способ состоит в следующем. Перед началом калибровки ЧЭ БИНС в полете проводят согласование инерциальной системы координат, моделируемой системой управления БИНС, с базовой инерциальной системой координат (БСК), моделируемой системой управления носителя. По результатам векторного согласования корректируют матрицу В перехода от приборной системы координат бесплатформенного инерциального блока к базовой инерциальной системе координат БИНС, используя зависимость С=А·В, а также корректируют значение матрицы С, которая определяется СУ носителя С=АГ·Аθ·А0.
Затем на некотором интервале времени по информации ЧЭ БИНС и ЧЭ комплекса командных приборов (ККП) носителя измеряют «n» приращений вектора кажущейся скорости (ВКС) на оси инерциальной СК, моделируемой СУ БИНС, и на оси базовой СК, моделируемой СУ носителя. Определяют величины рассогласований между проекциями ВКС на инерциальной СК БИНС и соответствующими проекциями на оси базовой системы координат, одновременно проводят пересчет полученных рассогласований проекций ВКС к осям приборной системы координат БИБ, используя скорректированную при векторном согласовании матрицу перехода от базовой СК к приборной системе координат, определяют «n» приращений составляющих вектора поворота приборной СК вследствие погрешностей ДУСов и корректируют полученные рассогласования проекций ВКС на оси ПСК на величины рассогласований ВКС вследствие погрешностей ДУСов.
Далее по полученным рассогласованиям ВКС, используя принятую математическую модель погрешностей акселерометров, определяют в вычислительном устройстве БИНС калибруемые параметры (смещение нуля и масштабный коэффициент) каждого акселерометра. Для повышения точности определения калибруемых параметров используют метод наименьших квадратов. Полученные калибруемые параметры акселерометров учитывают в алгоритмах расчета ВКС БИНС.
Калибруемые параметры ДУСов системы БИНС определяют с использованием проекций вектора поворота, полученных из сравнения матрицы перехода от приборной системы координат к базовой системе координат, которая формируется путем решения уравнений Пуассона по информации ДУСов СУ БИНС, с соответствующей матрицей перехода от ПСК к базовой системы координат, полученной из системы управления носителя. При этом определяют «n» приращений составляющих вектора поворота приборной СК вследствие погрешностей ДУСов.
Затем, используя принятую математическую модель погрешностей ДУСов, методом наименьших квадратов определяют смещение нуля и масштабный коэффициент каждого ДУСа.
Полученные калибруемые параметры ДУСов учитывают в алгоритмах СУ БИНС.
Для пояснения предлагаемого способа калибровки введем обозначения:
Аг - матрица углового положения системы координат O1X1Y1Z1, связанной с ГСП носителя, относительно базовой системы координат Оξηζ, которая зависит от погрешностей ориентации при начальной выставке и от уходов ГСП носителя;
Аθ - матрица углового положения системы координат ОкXкYкZк, связанной с корпусом карданова подвеса ГСП, относительно системы координат O1X1Y1Z1, определяемая по показаниям датчиков углов, установленных на осях карданова подвеса ГСП носителя;
А0 - матрица углового положения приборной системы координат OnXnYnZn, связанной с приборной площадкой бесплатформенного инерциального блока, относительно системы координат ОкXкYкZк;
С - матрица углового положения приборной системы координат OnXnYnZn относительно базовой системы координат Оξηζ;
В - матрица углового положения приборной системы координат OnXnYnZn относительно системы координат O2X2Y2Z2, которая вырабатывается БИНС в результате решения уравнений Пуассона при наличии погрешностей начальной ориентации и погрешностей ДУСов;
А - матрица углового положения инерциальной системы координат O2X2Y2Z2 моделируемой БИНС относительно базовой системы координат Oξηζ, которая определяется методом векторного согласования.
В результате векторного согласования системы координат О2X2Y2Z2 и базовая система координат Oξηζ совпадают, матрица А=0; В=С; кроме того С=АгАθА0.
Выделим из скорректированной матрицы С матрицу, равную Аθ. Для этого воспользуемся равенством:

откуда получим:

Равенство (1) определяет способ формирования матрицы С по информации СУ носителя.
Равенство (2) показывает возможность формирования матрицы Аθ, используя матрицу С системы БИНС и матрицы Аг и А0, полученные от СУ носителя.
Калибровка ДУСов проводится путем сравнения углов Эйлера, полученных из матрицы Аθ равенства (2), с углами, определенными по информации ДУ, установленных на осях карданова подвеса ГСП носителя, или вторым способом: получить вектор поворота, соответствующий матрице С равенства (1), и сравнить его с вектором поворота, который соответствует скорректированной матрице С, полученной на участке калибровки по информации БИНС.
Таким образом, для калибровки ДУСов БИНС в качестве исходной информации можно использовать:
1) разность углов Эйлера, полученных из матрицы 
2) разность углов, вычисленных как разность приращений векторов поворота, полученных на участке калибровки, из матрицы В БИНС, скорректированной после векторного согласования, и из матрицы С=АгАθА0, полученной по информации от системы управления носителя, которая является эталоном.
Следует отметить, что в обоих случаях для калибровки ДУСов необходимо иметь высокоточные датчики углов, установленные на оси карданова подвеса ГСП, а также достаточно жесткую конструкцию между местом крепления ГСП носителя и местами установки бесплатформенных инерциальных блоков системы управления БИНС, от которой зависит требуемое постоянное значение матрицы А0.
Для получения проекций вектора кажущейся скорости на оси базовой СК Oξηζ носителя и на оси инерциальной системы координат OX2Y2Z2, моделируемой БИНС, используются штатные алгоритмы и программы систем управления носителя и изделия ДС, управляемого с помощью БИНС. Для согласования названных систем координат можно использовать способ векторного согласования, изложенный в заявке на изобретение 2010123610/28 (033598) приоритет от 09.06.2010 г. «Способ повышения точности наведения доводочных ступеней различного назначения».
Для реализации предлагаемого способа калибровки ЧЭ БИБ в полете необходимо обеспечить выполнение следующих действий.
Для калибровки акселерометра в течение некоторого интервала времени определяют «n» приращений проекции ВКС на оси инерциальных систем координат носителя и БИНС, формируют из них разности, перепроектируют их на оси, связанной с БИБ СК OXnYnZn, и учитывают влияние погрешностей ДУСов.
Затем, используя математическую модель погрешностей акселерометров, определяют смещение нулей и поправок к масштабным коэффициентам методом наименьших квадратов.
Для оценки погрешности масштабного коэффициента δµ и смещения нуля δε математическая модель погрешностей акселерометров имеет вид

где WА - составляющая вектора кажущейся скорости, измеренная акселерометром на интервале времени Δt;
ΔWА - погрешность измерения составляющей WА;
δµ, δε - погрешность масштабного коэффициента и смещение нуля акселерометра, которые подлежат определению при калибровке;
Δt=t-tН - время на участке калибровки, отсчитанное от момента времени tН,
tН - время начала калибровки акселерометра.
Величины погрешностей ΔWiА (i=X,Y,Z) i-го акселерометра определяют путем пересчета рассогласований между проекциями ВКС на оси инерциальной СК, моделируемой СУ БИНС, и соответствующими проекциями ВКС на оси инерциальной СК, формируемой СУ носителя, к осям приборной системы координат бесплатформенного инерциального блока БИНС и учета в этих рассогласованиях влияния погрешностей ДУСов. Пересчет производят, используя следующие зависимости
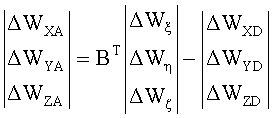
 ,
,
ΔВ=С-В,
где
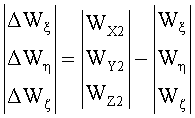
WX2, WY2, WZ2 - приращения проекций ВКС на оси инерциальной СК СУ БИНС на участке калибровки;
Wξ, Wη, Wζ - приращения проекций того же ВКС на оси инерциальной СК СУ носителя;
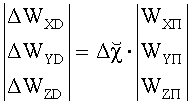
WXП, WYП, WZП - приращения проекций того же ВКС на оси ПСК, измеренные акселерометрами БИНС на участке калибровки;
ΔWXD, ΔWYD, ΔWZD - погрешности проекций ВКС на оси ПСК вследствие погрешностей ДУСов.
С - уточненная после векторного согласования матрица перехода от приборной СК к базовой СК, формируемая СУ носителя,
В - матрица, формируемая СУ БИНС,
 - вектор поворота СК OXПYПZП вследствие погрешностей ДУСов.
- вектор поворота СК OXПYПZП вследствие погрешностей ДУСов.
Для определения масштабного коэффициента и смещения нуля методом наименьших квадратов (МНК) модель погрешностей акселерометров путем деления на Δt приводят к виду
Y=θ0+θ1X,
где θ0 - смещение нуля ε;
θ1 - погрешность масштабного коэффициента δµ.
Величины Х и Y соответственно равны

Математическая модель погрешностей ДУСов имеет вид

где χ - угол поворота изделия, измеренный ДУСом;
Δχ - погрешность угла поворота χ;
δh - погрешность масштабного коэффициента ДУСа;
δω - смещение нуля ДУСа или его собственный дрейф вокруг измерительной оси.
Величины δh и δω подлежат определению при калибровке.
При калибровке ДУСов для определения погрешности масштабного коэффициента δh и смещения нуля δω исходной информацией является разность углов поворота изделия, полученных системой управления БИНС, и углов поворота изделия, полученных системой управления носителя.
Исходную информацию в требуемом виде получают следующим образом. На момент начала калибровки после векторного согласования СК определяют начальное значение матрицы В0, которая получена системой управления БИНС при решении уравнения Пуассона, а также начальное значение матрицы С0, полученной СУ носителя из равенства
В0=С0,
С0=Аг·Аθ·А0 при t=tН,
где tН - время начала калибровки ДУСов.
Уточненные значения матрицы А0 определяют после векторного согласования систем координат из равенства
А0=(АГ·Аθ)Т·С0.
Матрица А0 сохраняет свое значение неизменным в процессе калибровки.
Затем, в полете определяют матрицу ΔВ и определяют вектор поворота Δχ из следующих равенств:
ΔВ=С-В,
где В - матрица, которая моделируется СУ БИНС на участке калибровки при начальном значении В0;
С - матрица, которая формируется СУ носителя на участке калибровки ДУСов;
С=АГ·Аθ·А0,
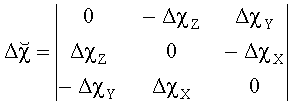
 ,
,
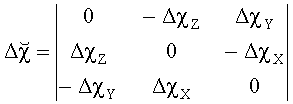 .
.
Определяют «n» приращений составляющих ΔχX, ΔχY, ΔχZ вектора поворота 
Модель ошибок ДУСов (4) приводят к виду
Y=θ0+θ1X
путем деления правой и левой частей уравнения погрешностей ДУСов на значение Δt,
при этом 

где θ0=δω - оценка смешения нуля ДУСов;
θ1=Δh - оценка погрешности масштабного коэффициента ДУСов;
χ - угол поворота изделия, измеренный ДУСом.
Оценку смещения нуля θ0 и погрешности масштабного коэффициента θ1 каждого ЧЭ БИНС методом наименьших квадратов определяют по следующим зависимостям
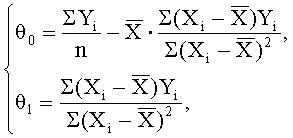
где 
Техническим результатом предлагаемого способа является повышение точности калибруемых параметров.
Изобретение относится к области приборостроения и может быть использовано при разработке бесплатформенных инерциальных навигационных систем (БИНС) для решения задач управления доводочными ступенями (ДС) различного назначения. Технический результат - повышение точности. Для этого способ калибровки чувствительных элементов (ЧЭ) БИНС обеспечивает сравнение текущей информации о векторе кажущейся скорости (ВКС) и векторе углов поворота изделия, полученной от ЧЭ БИНС, с аналогичной информацией, полученной от комплекса командных приборов (ККП) системы управления (СУ) носителя, которая является эталоном. При этом предлагаемая совокупность действий по обработке и разделению этой информации на составляющие на заданных интервалах времени позволяет определить калибруемые параметры методом наименьших квадратов с высокой точностью.
Способ калибровки чувствительных элементов (ЧЭ) бесплатформенной инерциальной навигационной системы управления (БИНС) в полете, основанный на сравнении информации о векторе кажущейся скорости (ВКС) и векторе углов поворота изделия, полученной от чувствительных элементов БИНС, с информацией о ВКС и векторе углов поворота изделия, полученной на том же интервале времени от комплекса командных приборов (ККП) системы управления (СУ) носителя, которая является в данном случае эталоном, отличающийся тем, что
перед началом калибровки акселерометров и датчиков угловой скорости (ДУСов) БИНС в полете проводят согласование инерциальной системы координат, моделируемой СУ БИНС, с базовой инерциальной системой координат (БСК), моделируемой СУ носителя, корректируют матрицу В перехода от приборной системы координат БИБ к базовой системе координат, а также корректируют начальное значение матрицы С, которая определяется системой управления носителя;
затем на некотором интервале времени по информации ЧЭ БИНС и ЧЭ ККП носителя измеряют «n» приращений ВКС на оси инерциальной СК, моделируемой СУ БИНС, и на оси базовой СК, моделируемой СУ носителя, определяют рассогласование между полученными проекциями, одновременно проводят пересчет полученных рассогласований проекций ВКС к осям приборной системы координат, используя скорректированную при векторном согласовании матрицу перехода от базовой к приборной СК, определяют «n» приращений составляющих вектора поворота приборной СК вследствие погрешностей ДУСов, корректируют полученные рассогласования проекций ВКС на оси ПСК на величины рассогласований ВКС вследствие погрешностей ДУСов;
далее по полученным рассогласованиям ВКС, используя принятую математическую модель погрешностей акселерометров, определяют в вычислительном устройстве БИНС методом наименьших квадратов смещение нуля и масштабный коэффициент каждого акселерометра;
по полученным «n» приращениям составляющих вектора поворота приборной СК вследствие погрешностей ДУСов, используя принятую математическую модель погрешностей ДУСов, методом наименьших квадратов определяют смещение нуля и масштабный коэффициент каждого ДУСа;
полученные калибруемые параметры учитывают в алгоритмах СУ БИНС.
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
| СПОСОБ КАЛИБРОВКИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2009 |
|
RU2406973C2 |
| БИНДЕР Я.И, ПАДЕРИНА Т.В., АНУЧИН О.Н | |||
| Калибровка датчиков угловой скорости с механическим носителем вектора кинетического момента в составе бесплатформенных инерциальных измерительных модулей | |||
| Г | |||
| и Н | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Теория, проектирование и испытания | |||

