Изобретение относится к области приборостроения и может быть использовано при разработке как платформенных, так и бесплатформенных инерциальных навигационных систем управления (БИНС) для решения задач управления доводочными ступенями (ДС) различного назначения.
При управлении движением ДС с использованием БИНС значительную часть погрешностей составляют погрешности определения начальной ориентации приборной системы координат (ПСК) OXПYПZП бесплатформенного инерциального блока (БИБ) относительно базовой системы координат Oξηζ, в которой решается навигационная задача (НЗ) ДС.
В качестве базовой системы координат используется инерциальная гироскопическая геоцентрическая система координат Oξηζ, которая материализуется гиростабилизированной платформой (ГСП) носителя. В момент начала решения навигационной задачи система координат Oξηζ совпадает со стартовой системой координат OXYZ.
Классическая схема построения БИНС предполагает жесткое крепление БИБ непосредственно на корпусе изделия. Проблема существенного повышения точности может решаться путем предстартовых калибровок чувствительных элементов (ЧЭ) БИНС, что может быть обеспечено заключением приборной площадки БИБ в двухосный карданов подвес. Один из способов калибровки ЧЭ БИНС изложен в патенте на изобретение №2334947, приоритет от 26.03.2007 г.
Известны способы определения начальной ориентации БИБ относительно базовой системы координат, патент на изобретение №2279635, приоритет от 02.11.2004 г., а также патент на изобретение №234010, приоритет от 08.10.2007 г. (принят за прототип). Здесь начальная ориентация приборной системы координат (ПСК) относительно базовой системы координат определяется во время предстартовой подготовки к пуску изделия методом векторного согласования с измерением двух неколлинеарных векторов (вектора  и
и  ) в согласуемых системах координат.
) в согласуемых системах координат.
Методом векторного согласования с измерением двух неколлинеарных векторов можно определить начальную ориентацию ПСК БИБ как в начале, так и в конце полета ракеты-носителя (РН) перед отделением ДС от носителя.
Основным преимуществом векторного согласования в конце полета РН является использование согласованной начальной ориентации сразу перед началом решения НЗ СУ БИНС перед отделением ДС от РН.
Основными недостатками векторного согласования систем координат в конце полета РН являются:
- необходимость создания специального маневра с разворотом изделия на большой угол (до 90°) при наличии больших перегрузок и больших угловых скоростей разворота и с потерей при этом энергетики;
- тяжелые условия работы ЧЭ БИБ ДС вследствие больших углов и скоростей разворота, больших перегрузок, значительно превышающих эти параметры при штатной работе на участке движения ДС;
- необходимость увеличения на порядок частоты пересчета показаний вектора кажущейся скорости (ВКС) от ПСК OXПYПZП БИБ ДС к базовой инерциальной системе координат по сравнению с необходимой частотой пересчета при автономном полете ДС;
- необходимость более полного учета поправок в ВКС на отличие переносного и кариолисова ускорения вследствие несовпадения мест расположения ГСП носителя и БИБ ДС.
Основными преимуществами векторного согласования в начале полета РН являются:
- отсутствие необходимости выполнения специального маневра РН для создания неколлинеарных векторов, так как для этой цели может быть использовано естественное изменение программы угла тангажа;
- возможность выбора участков полета, на которых ЧЭ БИБ ДС для формирования неколлинеарных векторов будут работать при существенно меньших, чем при выполнении специального маневра, перегрузках и меньших угловых скоростях, более близких к штатной работе.
Основным недостатком согласования в начале полета является необходимость сохранения согласованной системы координат до начала автономной работы БИНС на ДС с необходимой точностью.
Для устранения отмеченных недостатков предлагается способ повышения точности наведения ДС, заключающийся в наведении ДС на цель при движении в плоскости, близкой к «плоскости баллистического горизонта» (Разоренов Г.Н. и др., «Системы управления летательными аппаратами», издательство «Машиностроение», 2003 г.), и в определении начальной ориентации приборной системы координат БИБ ДС относительно базовой системы координат методом векторного согласования.
В предлагаемом способе начальная ориентация ПСК относительно базовой системы координат определяется на начальном участке полета РН вместе с ДС методом векторного согласования при использовании двух неколлинеарных векторов скорости.
Сохранение согласованной ориентации до конца полета РН обеспечивается решением уравнения Пуассона по сигналам с датчиков угловой скорости (ДУСов) БИБ ДС. Погрешность сохранения ориентации ПСК к концу полета РН определяется инструментальной погрешностью ДУСов БИБ ДС.
При разработке предлагаемого способа учитывались следующие особенности:
- при движении изделия в плоскости, близкой к «плоскости баллистического горизонта», в конце полета носителя и на участке наведения ДС на цель происходит максимальная экономия энергетики для наведения. При этом создаются условия для минимизации влияния погрешностей начальной ориентации БИНС на ожидаемое отклонение;
- приращение скорости в направлении баллистической вертикали не влияет на выполнение целевой задачи и используется для построения пространственных структур отделяемых полезных нагрузок;
- составляющая вектора поворота согласуемой системы координат от плоскости горизонта практически не влияет на ожидаемое отклонение, наибольшее влияние на ожидаемое отклонение оказывает составляющая вектора поворота в «плоскости баллистического горизонта»;
- при использовании одного вектора скорости для согласования систем координат можно определить только две составляющие вектора малого поворота. Третью составляющую вектора малого поворота, совпадающую с направлением вектора скорости, определить невозможно.
Предлагаемый способ отличается следующей совокупностью действий.
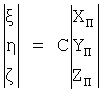
Во время предстартовой подготовки изделия к пуску по сигналам с датчиков углов φ, ψ, υ, установленных на осях карданова подвеса ГСП носителя, с учетом известной конструктивной ориентации БИБ ДС относительно осей карданова подвеса ГСП носителя, определяют предварительное значение матрицы В, которую используют в качестве начального условия для решения системой БИБ ДС уравнения Пуассона.
Например, начальное значение матрицы С перехода от ПСК к базовой системе координат через углы Эйлера φ, ψ, υ можно записать в виде:

Преобразование координат записывается в виде:
 .
.
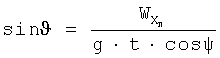
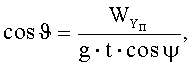
Синусы и косинусы углов ψ и υ этой матрицы определяют автономно во время предстартовой подготовки по измерению акселерометрами БИБ проекции ВКС на оси ПСК БИБ, используя следующие зависимости:



откуда получим
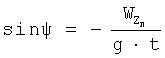 ,
,
 ,
,
 ,
,
где  ,
,  ,
,  - проекции вектора кажущейся скорости,
- проекции вектора кажущейся скорости,
g - ускорение силы тяжести,
t - время измерения.
По вновь полученным значениям углов ψ, υ определяют новое значение матрицы В, т.е. матрицу В′, в которой угол ψ сохраняет значение, определенное для матрицы В.
В момент начала решения навигационной задачи (НЗ) и перевода ГСП носителя в режим гироскопической стабилизации включают решение системой БИНС ДС уравнения Пуассона при начальном значении матрицы С0=В′, в результате чего система БИНС ДС создает инерциальную систему координат, которую обозначим OX2Y2Z2.
На первом участке полета РН вместе с ДС по сигналам акселерометров БИБ ДС в течение некоторого интервала времени t1, путем пересчета приращений проекций ВКС от ПСК OXПYПZП БИБ ДС в систему координат OX2Y2Z2 определяют проекции вектора  на оси СК OX2Y2Z2, одновременно в течение того же интервала времени t1 по показаниям акселерометров, установленных на ГСП носителя, определяют приращение проекций того же вектора на оси базовой системы координат Oξηζ.
на оси СК OX2Y2Z2, одновременно в течение того же интервала времени t1 по показаниям акселерометров, установленных на ГСП носителя, определяют приращение проекций того же вектора на оси базовой системы координат Oξηζ.
На втором участке полета изделия по сигналам акселерометров БИБ ДС и акселерометров ГСП носителя в течение интервала времени t2 определяют приращение проекций ВКС  , неколлинеарного вектору , на оси согласуемых систем координат OX2Y2Z2 и Oξηζ.
, неколлинеарного вектору , на оси согласуемых систем координат OX2Y2Z2 и Oξηζ.
По двум векторам и  методом векторного согласования определяют матрицу А перехода от системы координат OX2Y2Z2 к системе Oξηζ и корректируют матрицу С перехода от ПСК БИБ ДС к базовой системе координат Oξηζ, используя зависимость С=А·В′.
методом векторного согласования определяют матрицу А перехода от системы координат OX2Y2Z2 к системе Oξηζ и корректируют матрицу С перехода от ПСК БИБ ДС к базовой системе координат Oξηζ, используя зависимость С=А·В′.
На третьем участке полета изделия перед отделением ДС от РН снова корректируют матрицу С, для чего при движении носителя в плоскости, близкой к «плоскости баллистического горизонта», в течение интервала времени t3 по сигналам с акселерометров БИБ ДС и акселерометров ГСП носителя определяют приращение проекций ВКС  на оси согласуемых систем координат, определяют рассогласование согласуемых систем координат и корректируют матрицу перехода от ПСК БИБ ДС к базовой системе координат, полученную матрицу используют для решения задачи наведения ДС на цель.
на оси согласуемых систем координат, определяют рассогласование согласуемых систем координат и корректируют матрицу перехода от ПСК БИБ ДС к базовой системе координат, полученную матрицу используют для решения задачи наведения ДС на цель.
Для коррекции матрицы С на третьем участке полета предлагается ВКС  формировать при движении носителя в направлении, близком к
формировать при движении носителя в направлении, близком к  - направлению, а оценку рассогласования проводят следующим образом.
- направлению, а оценку рассогласования проводят следующим образом.
Проводят ортогонализацию векторов  , используя зависимости:
, используя зависимости:
 ;
;

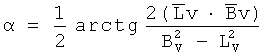 ,
,
где  и
и  - баллистические производные по скорости ожидаемых отклонений по дальности и боковому направлению.
- баллистические производные по скорости ожидаемых отклонений по дальности и боковому направлению.
Строят прямоугольную баллистическую систему координат Oλυµ, оси которой совпадают с направлением единичных векторов  ,
,  ,
,  .
.
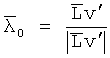 ;
; 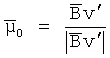 ;
; 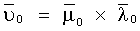 .
.
Вектор  определяет направление баллистической вертикали.
определяет направление баллистической вертикали.
Векторы  и
и  определяют «плоскость баллистического горизонта».
определяют «плоскость баллистического горизонта».
В конце полета носителя перед отделением ДС осуществляют движение для получения вектора скорости  , по направлению, близкому к (c точностью до нескольких градусов).
, по направлению, близкому к (c точностью до нескольких градусов).
Строят прямоугольную систему координат OX3Y3Z3 следующим образом:
 ;
;
 ;
;
 .
.
Отметим, что при совпадении направления вектора  с направлением оси систем координат OX3Y3Z3 и Oλυµ совпадают.
с направлением оси систем координат OX3Y3Z3 и Oλυµ совпадают.
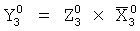
Матрица перехода от базовой системы координат Oξηζ к системе координат OX3Y3Z3 имеет вид:
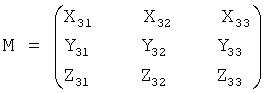 ,
,
где X3i, Y3i, Z3i (i=1, 2, 3) - проекции векторов  ,
,  ,
,  на оси системы координат Oξηζ.
на оси системы координат Oξηζ.
Так как системы координат прямоугольные, то
М-1=MT, т.е. обратная матрица равна транспонированной.
Определяют вектор рассогласования  в системах координат Oξηζ и OX3Y3Z3:
в системах координат Oξηζ и OX3Y3Z3:
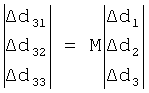
где  - вектор рассогласования;
- вектор рассогласования;
 - вектор , измеренный в базовой системе координат Oξηζ по информации акселерометров, установленных на ГСП носителя;
- вектор , измеренный в базовой системе координат Oξηζ по информации акселерометров, установленных на ГСП носителя;
 - вектор , измеренный в системе координат OX2Y2Z2 по показаниям измерителей БИНС;
- вектор , измеренный в системе координат OX2Y2Z2 по показаниям измерителей БИНС;
Δd1, Δd2, Δd3 - проекции вектора рассогласования на оси системы координат Oξηζ;
Δd31, Δd32, Δd33 - проекции вектора рассогласования Δ на оси системы координат OX3Y3Z3.
Делают оценку составляющих вектора поворота  в системе координат OX3Y3Z3, используя зависимости:
в системе координат OX3Y3Z3, используя зависимости:
 ;
;  ;
;  .
.
 ,
,  ,
,  - оценка проекций вектора поворота
- оценка проекций вектора поворота  на оси OX3Y3Z3.
на оси OX3Y3Z3.
Пересчитывают оценку вектора  в систему координат Oξηζ
в систему координат Oξηζ

Определяют оценку матрицы А и С
 ;
;  .
.
Полученную матрицу С используют для дальнейшего решения уравнения Пуассона.
После отделения ДС от РН дальнейшее ее наведение осуществляют преимущественно в плоскости, близкой к «плоскости баллистического горизонта», по вектору скорости  для попадания в точку, отстоящую от точки выведения носителя на расстояние ΔL по дальности и ΔВ по боковому направлению.
для попадания в точку, отстоящую от точки выведения носителя на расстояние ΔL по дальности и ΔВ по боковому направлению.
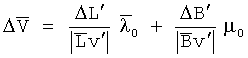 ;
;
 ;
;

Техническими результатами предлагаемого способа являются:
1. Существенное повышение точности наведения ДС по сравнению с известными способами.
2. Исключение необходимости создания специального маневра для векторного согласования с разворотом изделия на большой угол при наличии больших перегрузок и больших угловых скоростей разворота и с потерей при этом энергетики.
3. Возможность выбора участков полета для получения достаточно больших по модулю величин векторов, используемых для векторного согласования, без потери энергетики, при благоприятных условиях работы ЧЭ БИБ ДС, близких к штатной работе.
4. Возможность сокращения диапазонов угловых скоростей и перегрузок для штатной работы ЧЭ БИБ ДС.
5. Исключение необходимости полного учета поправок на отличие мест расположения ГСП носителя и БИБ ДС.
Изобретение относится к области измерительной техники и может быть использовано при разработке платформенных и бесплатформенных инерциальных навигационных систем управления (ИНС) для наведения доводочных ступеней (ДС) различного назначения. Технический результат - повышение точности. Для достижения данного результата формируют пространственные корректирующие воздействия при движении ДС в плоскости, близкой к «плоскости баллистического горизонта». Формирование корректирующих воздействий осуществляют на интервалах определения начальной ориентации приборной системы координат относительно базовой системы координат. При этом используют метод векторного согласования координат наведения ДС на цель. Каждый этап коррекции матрицы перехода от приборной системы координат к базовой системе координат повышает точность ее определения и тем самым обеспечивает повышение точности наведения доводимых ступеней на цель.
Способ повышения точности наведения доводочных ступеней (ДС) различного назначения, заключающийся в наведении доводочных ступеней при движении в плоскости, близкой к «плоскости баллистического горизонта» и определении начальной ориентации приборной системы координат (ПСК) бесплатформенного инерциального блока (БИБ) ДС относительно базовой системы координат методом «векторного согласования», отличающийся тем, что во время предстартовой подготовки изделия к пуску по сигналам с датчиков углов φ, ψ, υ, установленных на осях карданова подвеса гиростабилизированной платформы (ГСП) носителя, с учетом известной конструктивной ориентации БИБ ДС относительно осей карданова подвеса ГСП носителя, определяют предварительно значение матрицы В, которую используют в качестве начального условия для решения системой БИБ ДС уравнения Пуассона, затем синусы и косинусы углов ψ и υ матрицы В определяют автономно во время предстартовой подготовки по измерению акселерометрами БИБ проекции вектора кажущейся скорости (ВКС) на оси ПСК БИБ, и по вновь полученным значениям синусов и косинусов углов ψ, υ, определяют новое значение матрицы В, т.е. матрицу В′, в которой угол φ сохраняет значение, определенное для матрицы В, далее в момент начала решения навигационной задачи (НЗ) и перевода ГСП носителя в режим гироскопической стабилизации включают решение системой БИНС ДС уравнения Пуассона при начальном значении матрицы С0=В′, в результате чего система БИНС ДС создает систему координат OX2Y2Z2, потом на первом участке полета носителя вместе с ДС по сигналам акселерометров БИБ ДС в течение некоторого интервала времени t1 путем пересчета приращений проекций вектора кажущейся скорости от приборной системы координат OXПYПZП БИБ ДС в систему координат OX2Y2Z2 определяют проекции вектора  на оси СК OX2Y2Z2, одновременно в течение того же интервала времени t1 по показаниям акселерометров, установленных на ГСП носителя, определяют приращение проекций того же вектора на оси базовой системы координат Oξηζ, затем на втором участке полета изделия по сигналам акселерометров БИБ ДС и акселерометров ГСП носителя в течение интервала времени t2 определяют приращение проекций вектора кажущейся скорости
на оси СК OX2Y2Z2, одновременно в течение того же интервала времени t1 по показаниям акселерометров, установленных на ГСП носителя, определяют приращение проекций того же вектора на оси базовой системы координат Oξηζ, затем на втором участке полета изделия по сигналам акселерометров БИБ ДС и акселерометров ГСП носителя в течение интервала времени t2 определяют приращение проекций вектора кажущейся скорости  , неколлинеарного вектору , на оси согласуемых систем координат OX2Y2Z2 и Оξηζ, затем по двум векторам и
, неколлинеарного вектору , на оси согласуемых систем координат OX2Y2Z2 и Оξηζ, затем по двум векторам и  методом векторного согласования определяют матрицу А перехода от системы координат OX2Y2Z2 к системе Оξηζ, и корректируют матрицу С перехода от приборной системы координат БИБ ДС к базовой системе координат Оξηζ, на третьем участке полета изделия перед отделением ДС от носителя снова корректируют матрицу С перехода от приборной системы координат БИБ ДС к системе Оξηζ, для чего при движении носителя в плоскости, близкой к «плоскости баллистического горизонта», в течение интервала времени t3 по сигналам с акселерометров БИБ ДС и акселерометров ГСП носителя определяют приращение проекций вектора кажущейся скорости на оси согласуемых систем координат, определяют рассогласование согласуемых систем координат и корректируют матрицу перехода от приборной системы координат БИБ ДС к базовой системе координат Оξηζ, полученную матрицу используют для решения задачи наведения ДС на цель.
методом векторного согласования определяют матрицу А перехода от системы координат OX2Y2Z2 к системе Оξηζ, и корректируют матрицу С перехода от приборной системы координат БИБ ДС к базовой системе координат Оξηζ, на третьем участке полета изделия перед отделением ДС от носителя снова корректируют матрицу С перехода от приборной системы координат БИБ ДС к системе Оξηζ, для чего при движении носителя в плоскости, близкой к «плоскости баллистического горизонта», в течение интервала времени t3 по сигналам с акселерометров БИБ ДС и акселерометров ГСП носителя определяют приращение проекций вектора кажущейся скорости на оси согласуемых систем координат, определяют рассогласование согласуемых систем координат и корректируют матрицу перехода от приборной системы координат БИБ ДС к базовой системе координат Оξηζ, полученную матрицу используют для решения задачи наведения ДС на цель.
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2004 |
|
RU2279635C2 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| БОДНЕР B.A | |||
| Системы управления ЛА | |||
| - M.: Машиностроение, 1973 | |||
| Система управления боковым движением беспилотного малоразмерного летательного аппарата | 1990 |
|
SU1825746A1 |
| НОВОСЕЛОВ А.С | |||
| и др | |||
| Системы адаптивного управления летательными аппаратами | |||
| - М.: Машиностроение, 1987 | |||
| РАЗОРЕНОВ Г.Н | |||
| и др | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 2003. | |||

