Изобретение относится к гироскопическим устройствам. Может быть применено преимущественно на средствах передвижения, содержащих устройства с применением гироскопов.
Известен гироскоп, содержащий ротор, ось которого может изменять свое направление в пространстве, что обеспечивается применением карданного подвеса из последовательно размещенных кожухов в виде колец или рамок, опирающихся на цапфы осей и подшипники (см. "Политехнический словарь" под ред А.Ю.Ишлинского, - М.: Советская энциклопедия, 1980, стр.122).
Известен также гироскоп, ротор которого закреплен на середине оси, связанной подвижно с возможностью вращения с основанием гироскопа через подшипники. При вынужденном вращении (повороте) основания гироскопа возникает пара гироскопических сил, направленных в противоположные стороны перпендикулярно к оси собственного вращения ротора (см. "Физический энциклопедический словарь" под ред. А.М.Прохорова, - М.: Советская энциклопедия, 1984, стр.126/3), (далее - Словарь).
Недостатками указанных гироскопов является то, что создаваемая ротором пара гироскопических сил передается на основание гироскопа с использованием оси, выступающей по обе стороны от ротора, образуя плечи пары сил, воздействующих на основание через подшипники, что усложняет устройство гироскопа, уменьшает надежность его функционирования и приводит к необходимости учитывать характер действия этих противоположно направленных сил при соответствующих инженерных расчетах (см. Словарь, стр.126/3 и 127/1).
Предлагаемое изобретение позволяет получить технический результат, заключающийся в обеспечении непосредственной опоры ротора на основание без промежуточных частей между ними, что упрощает устройство гироскопа и систему передачи на основание созданной ротором силы, а также повышает надежность функционирования гироскопа.
Указанный технический результат достигается тем, что применяют гироскопическое устройство, ротор которого создает гироскопическую силу, направленную перпендикулярно относительно оси собственного вращения ротора. Согласно изобретению гироскопическое устройство содержит два ротора, размещенных на противоположных концах единой оси с возможностью вращения на этой оси на своих подшипниках в противоположных направлениях относительно друг друга. Ось в средней своей части на равном расстоянии от роторов жестко соединена с валом привода гироскопического устройства перпедикулярно друг другу. На основании гироскопического устройства закреплено соосно валу привода неподвижное коническое зубчатое опорное колесо, а роторы снабжены коническими зубчатыми венцами, входящими в зацепление с зубчатым опорным колесом с диаметрально противоположных его сторон. К коническим зубчатым венцам роторов и к опорному колесу к боковым их сторонам соосно прикреплены круглые опорные поверхности соответственно роторов и опорного колеса, которые выполнены в форме усеченных конических поверхностей, находящихся попарно относительно каждого ротора и опорного колеса в постоянном соприкосновении друг с другом. Конический зубчатый венец и опорная поверхность у каждого ротора размещены в углублении в боковой поверхности ротора, при этом центр массы каждого ротора, подшипник и опорные поверхности опорного колеса и ротора размещены на одной прямой линии с возможностью воздействия гироскопических сил от роторов на опорное колесо и основание гироскопического устройства, неподвижно соединенные друг с другом.
На приведенном чертеже дан общий вид гироскопического устройства в разрезе по осевой линии O-O оси роторов с показом направления вращения роторов ω и вала привода ω1, а также направления возникающих при этом сил F.
Гироскопическое устройство содержит два ротора 1, размещенных на противоположных концах единой оси 2 с возможностью вращения на этой оси на своих подшипниках 3 в противоположных направлениях относительно друг друга. Ось 2 в средней своей части на равном расстоянии от роторов 1 жестко соединена с валом 4 привода гироскопического устройства перпендикулярно друг другу. На основании 5 гироскопического устройства закреплено соосно валу 4 привода неподвижное коническое зубчатое опорное колесо 6, а роторы снабжены коническими зубчатыми венцами 7, входящими в зацепление с зубчатым опорным колесом с диаметрально противоположных его сторон. К коническим зубчатым венцам роторов и к опорному колесу к боковым их сторонам соосно прикреплены круглые опорные поверхности 9 и 8 соответственно роторов и опорного колеса, которые выполнены в форме усеченных конических поверхностей, находящихся попарно относительно каждого ротора и опорного колеса в постоянном соприкосновении друг с другом. Конический зубчатый венец 7 и опорная поверхность 9 у каждого ротора размещены в углублении 10 в боковой поверхности ротора, при этом центр массы каждого ротора 1, подшипник 3 и опорные поверхности 8, 9 опорного колеса 6 и ротора размещены на одной прямой линии А-А с возможностью воздействия гироскопических сил F от роторов на опорное колесо и основание гироскопического устройства, неподвижно соединенные друг с другом.
Опорные поверхности роторов 9 и опорного колеса 8 и относящиеся к ним попарно начальные окружности зубчатого опорного колеса 6 и зубчатых венцов 7 роторов совмещены с боковыми поверхностями соответствующих им виртуальных полых конусов, вершины которых совмещены с точкой соединения оси 2 и вала 4 привода, что исключает возможность взаимного скольжения опорных поверхностей роторов и опорного колеса. Взаимодействие этих элементов возможно только путем перекатывания постоянно соприкасающихся опорной поверхности 9 ротора по неподвижной опорной поверхности 8 опорного колеса, что исключает возможность их взаимного ускоренного износа с соответствующей потерей энергии.
Гироскопическое устройство работает следующим образом.
Вращающийся вал 4 привода приводит во вращение скрепленную с ним ось 2 вместе с размещенными на ней роторами 1 вокруг линии оси О1-О1 вала привода. Зубчатые венцы 7 роторов перекатываются по неподвижному зубчатому опорному колесу 6 и при этом одновременно с роторами совершают вращение относительно линии оси O1-О1 вала 4 привода. Вместе с тем, роторы совершают вращение относительно друг друга в противоположных направлениях, поскольку они находятся в зацеплении с диаметрально противоположными сторонами опорного колеса 6. Каждый из роторов 1 совместно со скрепленными с ним зубчатым венцом 7 и опорной поверхностью 9 вращается как единая деталь. Возникающие при этом гироскопические силы F от каждого ротора направлены параллельно валу 4 привода вдоль прямых линий А-А. Это обусловлено известными свойствами гироскопа, у которого гироскопические силы стремятся кратчайшим путем установить ось 2 ротора параллельно оси О1-О1 вала 4 привода, причем так, чтобы и вращение роторов 1, и вращение вала 4 привода происходили в одну и ту же сторону. Гироскопические силы F от каждого ротора через постоянно соприкасающиеся опорные поверхности ротора 9 и опорного колеса 8 воздействуют на основание 5 гироскопического устройства.
Из особенностей устройства и показанного выше его функционирования следует, что оно является двухступенчатой системой гироскопов.
Первыми ступенями являются два ротора 1, совершающих вращение ω вокруг линии O-O оси 2 роторов с одновременным вынужденным вращением (поворотом) ω1 вокруг линии O1-О1 оси вала 4 привода. При этих условиях проявляются свойства каждого из роторов 1, как гироскопа с двумя степенями свободы, создающего силу F, направленную перпендикулярно оси 2 собственного вращения ротора.
Второй ступенью системы является гироскоп, ротором которого служит совокупность масс двух роторов 1 как единое целое, совершающая вращение вокруг линии О1-О1 оси вала 4 привода. Вторая ступень системы является гироскопом с двумя степенями свободы, поскольку при вынужденном вращении (повороте) этой системы вокруг какой-либо иной оси, не совпадающей с направлением линии О1-О1 оси вала 4 привода (например, перпендикулярной к ней), эта система будет сопротивляться изменению направления своей линии О1-О1 оси и вала 4 привода. В связи с этим все устройство в целом будет обладать свойствами гироскопа с двумя степенями свободы с возможным использованием в соответствующем качестве. При указанных условиях вынужденного вращения (поворота) системы вокруг иной оси каждый из роторов 1 будет обладать свойствами гироскопа с тремя степенями свободы, поскольку при указанных выше условиях роторы 1 приобретают возможность вращения вокруг трех линий осей - O-O, О1-О1 и указанной выше третьей (иной) линии оси возможного вынужденного вращения (поворота).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2332641C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2334196C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2357211C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2357210C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО С УРАВНОВЕШЕННЫМИ ГИРОСКОПИЧЕСКИМИ СИЛАМИ | 2008 |
|
RU2370731C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО С РАВНОДЕЙСТВУЮЩЕЙ СИСТЕМЫ ГИРОСКОПИЧЕСКИХ СИЛ И УРАВНОВЕШЕННЫМИ СИЛАМИ ПРОТИВОДЕЙСТВИЯ | 2011 |
|
RU2444702C9 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171927C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277653C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247884C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО С УРАВНОВЕШЕННЫМИ ГИРОСКОПИЧЕСКИМИ СИЛАМИ | 2008 |
|
RU2376553C1 |
Изобретение относится к гироскопическим устройствам и может быть использовано на средствах передвижения. На концах оси 2 гироскопа размещены роторы 1 с возможностью свободного вращения на этой оси. Ось в средней своей части между роторами перпендикулярно соединена с валом привода 4. Роторы снабжены зубчатыми венцами 7, которые находятся в зацеплении с диаметрально противоположных сторон с зубчатым опорным колесом 6, размещенным соосно с валом привода и неподвижно закрепленным в основании 5 гироскопа. К роторам и опорному колесу прикреплены находящиеся попарно в постоянном соприкосновении опорные поверхности 8, 9 в форме усеченных конических поверхностей. Зубчатый венец и опорная поверхность каждого ротора размещены в углублении в боковой поверхности каждого ротора, при этом центр массы каждого ротора, его подшипники 3 и опорные поверхности ротора и опорного колеса размещены на одной прямой линии А-А. Вращающийся вал привода приводит во вращение скрепленную с ним ось вместе с роторами вокруг линии своей оси O1-O1. Зубчатые венцы роторов перекатываются по зубчатому опорному колесу и при этом одновременно с роторами совершают вращение относительно линии оси O1-O1 вала привода, а также линии оси O-O ротора в противоположных направлениях относительно друг друга. Техническим результатом является упрощение гироскопа и повышение надежности его действия. 1 ил.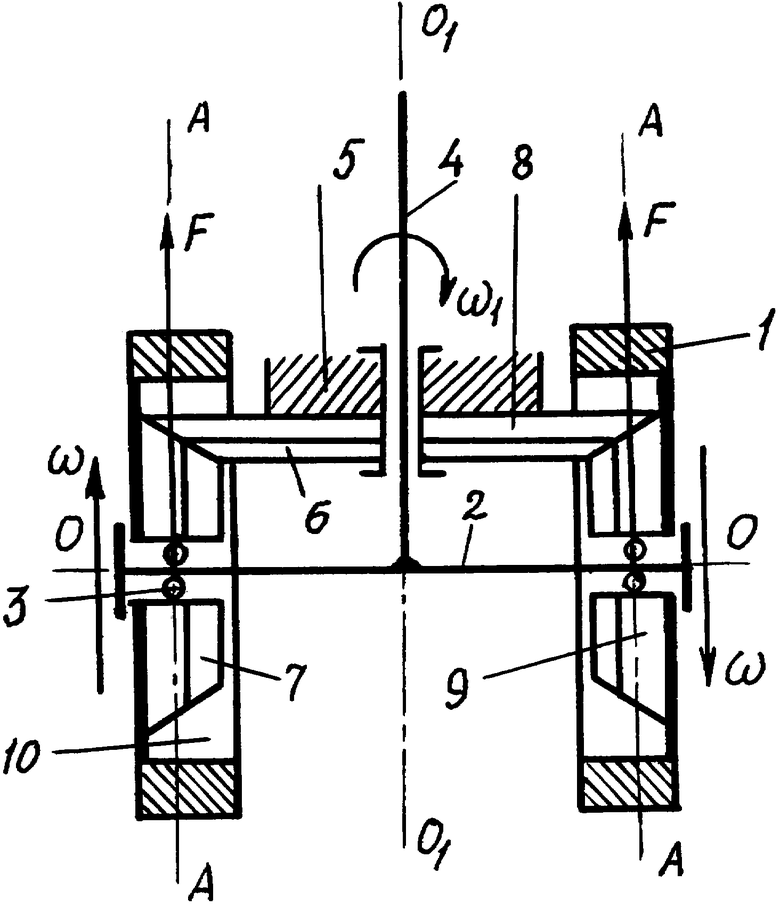
Гироскопическое устройство, содержащее размещенный на оси ротор, который при вынужденном вращении его основания создает гироскопическую силу, направленную перпендикулярно относительно оси ротора, отличающееся тем, что оно содержит два ротора, размещенных на противоположных концах единой оси гироскопа с возможностью вращения на этой оси на своих подшипниках в противоположных направлениях относительно друг друга, ось в средней своей части на равном расстоянии от роторов жестко соединена с валом привода гироскопического устройства перпендикулярно друг другу, на основании гироскопического устройства закреплено соосно валу привода неподвижное коническое зубчатое опорное колесо, а роторы снабжены коническими зубчатыми венцами, входящими в зацепление с зубчатым опорным колесом с диаметрально противоположных его сторон, к коническим зубчатым венцам роторов гироскопа и к опорному колесу к боковым их сторонам соосно прикреплены круглые опорные поверхности соответственно роторов и опорного колеса, которые выполнены в форме усеченных конических поверхностей, находящихся попарно относительно каждого ротора и опорного колеса в постоянном соприкосновении друг с другом, конический зубчатый венец и опорная поверхность у каждого ротора размещены в углублении в боковой поверхности ротора, при этом центр массы каждого ротора, подшипник и опорные поверхности опорного колеса и ротора размещены на одной прямой линии с возможностью воздействия гироскопических сил от роторов на опорное колесо и основание гироскопического устройства.
| НИКИТИН Н.Н | |||
| Курс теоретической механики | |||
| - М.: Высшая школа, 1990, с.514 | |||
| УСТРОЙСТВО для ПЕРЕПЛЕТЕНИЯ ФИЛАМЕНТОВ | 0 |
|
SU369195A1 |
| Способ получения фосфата алюминия | 1974 |
|
SU559895A1 |
| US 3662608 А, 16.05.1972 | |||
| Феррорезонансный стабилизатор переменного напряжения | 1979 |
|
SU911490A2 |
| GB 544094 А, 27.03.1942. | |||

