Изобретение относится к гироскопическим устройствам и может быть применено преимущественно на средствах передвижения, содержащих устройства с применением гироскопов.
Известен гироскоп, содержащий ротор, ось вращения которого может изменять свое направление в пространстве, что обеспечивается применением карданного подвеса из последовательно размещенных кожухов в виде колец или рамок, опирающихся на цапфы осей и подшипники (см. ″Политехнический словарь" под ред. А.Ю.Ишлинского, изд. "Советская энциклопедия″, M. - 1980, стр.122) (далее - ПС).
Известен также гироскоп, ось ротора которого связана с основанием гироскопа через подшипники с возможностью вращения по отношению к основанию, способному совершать вынужденное вращение. Воздействующая при этом на каждый из подшипников гироскопическая сила направлена перпендикулярно к оси собственного вращения ротора (см. ″Физический энциклопедический словарь″ под ред. А.И.Прохорова, М., ″Советская энциклопедия″, 1984, стр.126/3) (далее - Словарь).
Недостатком этого гироскопа, как и указанного выше аналога, является то, что воздействующая на каждый из подшипников гироскопическая сила передается на основание гироскопа с использованием оси ротора, т.е. с применением промежуточных частей в виде оси и подшипника, что усложняет устройство гироскопа и приводит к необходимости учитывать характер действия этой силы при соответствующих инженерных расчетах (см. Словарь, стр.126/3 и 127/1).
Предлагаемое изобретение позволяет получить технический результат, заключающийся в отсутствии промежуточных частей между ротором и основанием гироскопа, что упрощает устройство гироскопа и систему передачи гироскопических сил, а такие повышает надежность функционирования гироскопа.
Указанный технический результат достигается тем, что применяют гироскопическое устройство, ротор которого создает гироскопическую силу, направленную перпендикулярно относительно оси собственного вращения ротора. При этом вектор момента количества движения центра массы ротора относительно точки вращения направлен вдоль линии оси его вала привода.
Согласно изобретению гироскопическое устройство содержит два ротора, размещенных на противоположных концах оси роторов с возможностью их вращения на этой оси. На основании гироскопического устройства закреплено соосно его валу привода коническое зубчатое опорное колесо, а роторы снабжены соединенными с ними коническими зубчатыми колесами, входящими в зацепление с зубчатым опорным колесом с диаметрально противоположных его сторон, что обеспечивает возможность вращения роторов в противоположных направлениях относительно друг друга. К зубчатым колесам роторов и к зубчатому опорному колесу к боковым их сторонам соосно прикреплены соотетственно опорные колеса роторов и центральное опорное колесо, ободы которых выполнены в форме усеченных конусов, находящихся попарно относительно каждого опорного колеса ротора и центрального опорного колеса в постоянном соприкосновении друг с другом. Зубчатое колесо и опорное колесо каждого ротора размерены в углублении в боковой поверхности ротора, при этом центр массы каждого ротора, совмещенный с ним подшипник ротора и соприкасающиеся поверхности центрального опорного колеса и опорного колеса ротора размещены на одной прямой линии с возможностью воздействия гироскопической силы от каждого ротора на основание гироскопического устройства через центральное опорное колесо. Середина оси роторов, размещенная на равном расстоянии от них, является центральной точкой гироскопического устройства. На валу привода закреплено зубчатое колесо привода, которое с диаметрально противоположных сторон находится в зацеплении с зубчатыми колесами роторов. Векторы гироскопических сил направлены параллельно валу привода, а векторы моментов количества движения - вдоль линии оси вала привода.
На валу привода соосно с зубчатым колесом привода закреплено опорное колесо привода, обод которого выполнен в форме усеченного конуса и находится с диаметрально противоположных сторон в постоянном соприкосновении с ободами опорных колес роторов, обеспечивая симметричное приложение нагрузок на опорные колеса роторов со стороны центрального опорного колеса и опорного колеса привода.
На приведенном чертеже дан общий вид предложенного гироскопического устройства в разрезе по осевой линии O-O оси роторов с показом направления вращения роторов ω и вала привода ω1, a также направления векторов возникающих при этом гироскопических сил F и моментов количества движения К роторов.
В гироскопическом устройстве применяют гироскоп, ротор которого создает гироскопическую силу F, направленную перпендикулярно относительно оси 2 роторов 1. При этом вектор момента количества движения К центра масс каждого ротора относительно точки O1 его кругового движения направлен вдоль линии O1-O1 оси его привода. Роторы 1 гироскопического устройства размещены на противоположных концах оси 2 роторов с возможностью свободного их вращения на этой оси. На основании 3 гироскопического устройства закреплено соосно его валу привода 4 коническое зубчатое опорное колесо 5, а роторы снабжены соединенными с ними коническими зубчатыми колесами 6, входящими в зацепление с зубчатым опорным колесом 5 с диаметрально противоположных его сторон, что обеспечивает возможность вращения роторов 1 в противоположных направлениях на своей оси 2 относительно друг друга. К зубчатым колесам роторов 6 и к зубчатому опорному колесу 5 к боковым их сторонам соосно прикреплены соответственно опорные колеса 7 роторов и центральное опорное колесо 8, ободы которых выполнены в форме усеченных конусов, находящихся попарно относительно каждого опорного колеса 7 ротора и центрального опорного колеса 8 в постоянном соприкосновении друг с другом. Зубчатое колесо и опорное колесо каждого ротора размещены в центральном углублении 9 в боковой поверхности ротора. Центр массы каждого ротора, совмещенный с ним подшипник 10 ротора и соприкасающиеся поверхности ободов центрального опорного колеса 8 и опорного колеса 7 ротора размещены на одной прямой линии А-А с возможностью воздействия гироскопических сил F от каждого ротора на основание 3 гироскопического устройства через центральное опорное колесо 8. Подшипники 10 роторов не связаны с основанием гироскопического устройства и не участвуют в передаче на него от роторов гироскопических сил. Середина оси O-O роторов, размещенная на равном расстоянии от них, является центральной точкой О1 гироскопического устройства, относительно которой совершают круговое движение центры масс роторов с созданием моментов количества движения. На валу привода 4 закреплено зубчатое колесо привода 11, которое с диаметрально противоположных сторон находится в зацеплении с зубчатыми колесами 6 роторов. Векторы гироскопических сил F и моментов количества движения К роторов 1, вращающихся одновременно вокруг оси 2 роторов и линии оси O1-O1 вала привода 4, что равнозначно вращению их относительно центральной точки О1 гироскопического устройства, направлены первые из них параллельно валу привода 4, а вторые - вдоль линии оси O1-O1 вала привода 4.
Ободы центрального опорного колеса 8 и опорных колес 7 роторов 1 имеют форму поверхностей усеченных конусов, вершины которых совмещены с центральной точкой O1 гироскопического устройства, что исключает возможность взаимного скольжения поверхностей ободов упомянутых колес при их вращении. Взаимодействие этих соприкасающихся элементов возможно только путем их взаимного перекатывания, что исключает возможность их ускоренного износа с соответствующей потерей энергии.
На валу привода 4 закреплено опорное колесо 12 привода, обод которого выполнен в форме усеченого конуса и находится с диаметрально противоположных сторон в постоянном соприкосновении с ободами опорных колес 7 роторов, обеспечивая симметричное приложение нагрузок на опорные колеса роторов со стороны центрального опорного колеса 8 и опорного колеса 12 привода. При этом опорное колесо 12 привода укреплено соосно с зубчатым колесом 11 привода.
Гироскопическое устройство работает следующим образом.
Вращающийся вал привода 4 и зубчатое колесо 11 привода приводят во вращение зубчатое колесо 6 каждого ротора вместе с соединенными с ними роторами 1. При этом зубчатые колеса роторов перекатываются по зубчатому опорному колесу 5, что приводит роторы во вращение одновременно вокруг оси 2 роторов и линии оси O1-O1 вала привода 4, что равнозначно вращению роторов относительно центральной точки O1 пересечения линии оси O-O роторов и линии оси O1-O1. При этом роторы 1 вращаются ω вокруг оси 2 роторов в противоположных направлениях относительно друг друга, поскольку их зубчатые колеса 6 находятся в зацеплении с неподвижным зубчатым опорным колесом 5 с диаметрально противоположных его сторон. Возникающие при этом гироскопические силы F от каждого ротора направлены параллельно линии оси O1-O1 вала привода. Это обусловлено тем, что гироскопические силы F стремятся кратчайшим путем установить ось 2 роторов параллельно линии оси O1-O1 вала привода 4, вокруг которой они совершают вращение, причем так, чтобы и вращение роторов вокруг линии оси вала привода и вращение вала привода происходили в одну и ту же сторону (см. Словарь, стр.126/3).
Векторы К моментов количества движения роторов направлены вдоль линии оси O1-O1 вала привода 4, проходящей через центральную точку O1, поскольку вектор К момента количества движения каждого ротора относительно этой точки направлен перпендикулярно к плоскости, в которой совершает круговое движение ось 2 роторов, причем так, что из конца вектора К вращение ω1 роторов вокруг этой точки видно происходящим против часовой стрелки (см. ПС, стр.310).
Как следует из сказанного выше, в гироскопическом устройстве отсутствуют какие-либо промежуточные части для передачи возникающих сил от роторов на основание. Эта передача осуществляется от роторов непосредственно на основание гироскопического устройства, что обеспечивает в полном объеме достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2332641C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2006 |
|
RU2335737C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО С УРАВНОВЕШЕННЫМИ ГИРОСКОПИЧЕСКИМИ СИЛАМИ | 2008 |
|
RU2370731C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2357210C1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ ГИРОСКОПИЧЕСКИХ СИЛ И ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2398188C1 |
| ИНЕРЦИОННАЯ АВТОМАТИЧЕСКАЯ ПЕРЕДАЧА | 1993 |
|
RU2068135C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2357211C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2277654C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО С УРАВНОВЕШЕННЫМИ ГИРОСКОПИЧЕСКИМИ СИЛАМИ | 2008 |
|
RU2376553C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2171933C2 |
Изобретение относится к гироскопическим устройствам и может быть использовано на средствах передвижения. На концах оси 2 размещены роторы 1 с возможностью свободного вращения на этой оси. В углублении 9 в боковой поверхности каждого ротора размещены соосно соединенные с ним зубчатое колесо 6 и опорное колесо 7, обод которого выполнен в виде усеченной конической поверхности. Зубчатые колеса роторов находятся в зацеплении с закрепленным в основании 3 зубчатым опорным колесом 5 с диаметрально противоположных его сторон, а также с диаметрально противоположных сторон с зубчатым колесом привода 11, соединенным с валом привода 4. Соосно с зубчатым опорным колесом соединено с ним и с основанием центральное опорное колесо 8, обод которого выполнен в виде усеченной конической поверхности, находящейся в соприкосновении с диаметрально противоположных сторон с ободами опорных колес роторов. Середина оси роторов в пересечении с линией оси O1-О1 вала привода является центральной точкой O1 устройства. Центр массы каждого ротора, его подшипник 10 и место соприкосновения ободов опорного колеса ротора и центрального опорного колеса размещены на одной прямой линии А-А, параллельной линии оси О1-О1 вала привода. Техническим результатом является упрощение конструкции и повышение надежности. 1 з.п. ф-лы, 1 ил.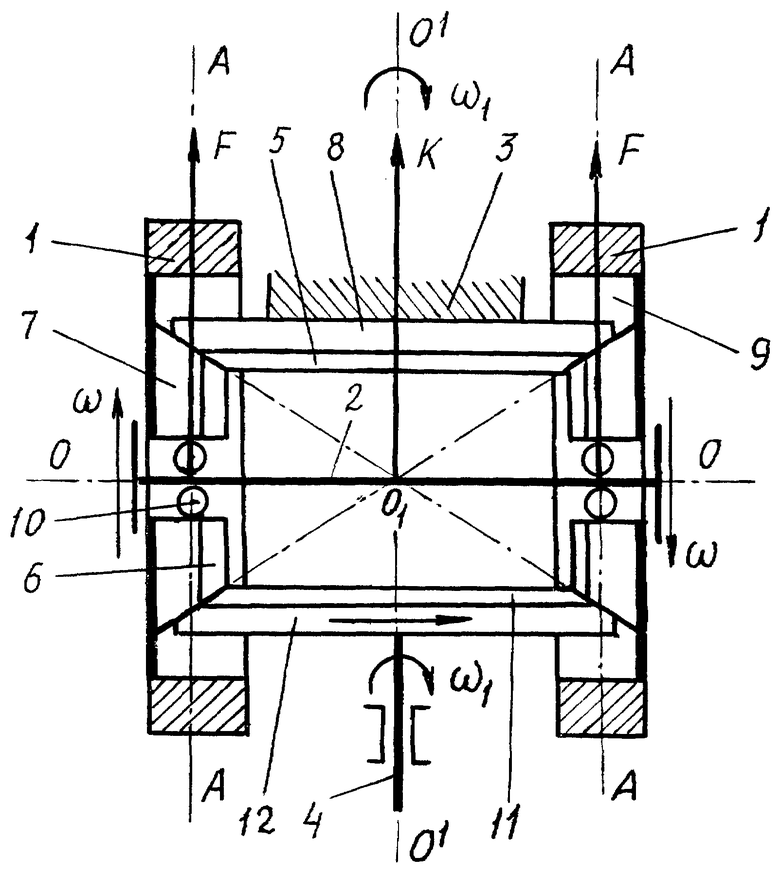
| НИКИТИН Н.Н | |||
| Курс теоретической механики | |||
| - М.: Высшая школа, 1990, с.154 | |||
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 0 |
|
SU369395A1 |
| Способ получения фосфата алюминия | 1974 |
|
SU559895A1 |
| US 3662608 А, 16.05.1972 | |||
| Феррорезонансный стабилизатор переменного напряжения | 1979 |
|
SU911490A2 |
| GB 544094 А, 27.03.1942. | |||

