Изобретение относится к гироскопическим устройствам. Может быть применено преимущественно на средствах передвижения, содержащих устройства с применением гироскопов с двумя степенями свободы.
Известен гироскоп, содержащий ротор, ось вращения которого может изменять свое направление в пространстве, что обеспечивается применением карданного подвеса из последовательно размещенных кожухов в виде колец или рамок, опирающихся на цапфы осей и подшипники (см. «Политехнический словарь» под ред. А.Ю.Явлинского, изд. «Советская энциклопедия», M. - 1980, стр.122) (далее - ПС).
Недостатком этого гироскопа является применение последовательно размещенных кожухов с осями и подшипниками, воспринимающими нагрузку в виде пар сил, что усложняет устройство и требует принятия специальных дополнительных мер по противодействию этим парам сил с целью удержания осей гироскопа в подшипниках (см. "Физический энциклопедический словарь" под ред. А.Н.Прохорова, М., "Советская энциклопедия", 1984, стр.126-127) (далее - Словарь).
Известен также гироскоп с двумя степенями свободы, ось ротора которого закреплена в рамке с возможностью вращения по отношению к основанию, способному совершать вынужденное вращение (см. Словарь, стр.126).
Этот гироскоп имеет те же недостатки, что и указанный выше аналог.
Предлагаемое изобретение позволяет получить технический результат, заключающийся в отсутствии воздействия каких-либо сил на оси и подшипники роторов гироскопического устройства в связи с их отсутствием, что обеспечивает более надежное функционирование гироскопического устройства и устраняет необходимость учитывать действие упомянутых сил при соответствующих инженерных расчетах (см. Словарь, стр.127/1, верхний абзац).
Указанный технический результат достигается тем, что применяют гироскопическое устройство, содержащее ротор, который создает гироскопическую силу с направлением вектора силы перпендикулярно оси собственного вращения, при этом вектор момента количества движения ротора направлен перпендикулярно к плоскости, в которой совершает вынужденное вращение линия оси ротора. Согласно изобретению гироскопическое устройство содержит два обособленных ротора, не связанных между собой осью, расположенных на общей линии оси роторов по обеим сторонам от перпендикулярной ей линии оси вала привода на равном расстоянии от этой линии оси. Пересечение линии оси роторов и линии оси вала привода является центральной точкой гироскопического устройства. На основании гироскопического устройства закреплено соосно валу привода коническое зубчатое опорное колесо, а роторы снабжены соосно соединенными с ними коническими зубчатыми колесами, входящими в зацепление с опорным колесом с диаметрально противоположных его сторон, что обеспечивает возможность вращения роторов вокруг линии их оси в противоположных направлениях относительно друг друга. Колеса роторов наряду с зубчатыми венцами имеют гладкие ободы. В боковой поверхности опорного колеса, обращенной в сторону центральной точки гироскопического устройства, выполнен концентрический круговой паз, в котором размещены гладкие ободы колес роторов, находящиеся в постоянном соприкосновении с внешней стороной кругового паза опорного колеса. При этом место соприкосновения кругового паза опорного колеса с ободом каждого колеса ротора и находящиеся в зацеплении зубчатый венец опорного колеса и зубчатый венец каждого колеса ротора совмещены с прямой линией, проходящей через центральную точку гироскопического устройства. Диаметры колес роторов меньше диаметра опорного колеса, а сами колеса роторов размещены в углублениях в боковых поверхностях роторов. На валу привода соосно закреплено колесо привода, которое выполнено так же, как и опорное колесо, и подвижно связано с колесами роторов аналогичным образом. Вращение роторов одновременно вокруг линии своей оси и линии оси вала привода, что равнозначно их вращению относительно центральной точки гироскопического устройства, обеспечивает возможность создания ими действующих на опорное колесо и основание гироскопического устройства гироскопических сил и моментов количества движения. Векторы первых из них направлены от каждого ротора через место соприкосновения обода колеса ротора с круговым пазом опорного колеса параллельно линии оси вала привода, а вторых - вдоль линии оси вала привода. Центробежные силы, действующие на роторы при вращении их вокруг линии оси вала привода, передаются через ободы колес роторов на внешние стенки круговых пазов опорного колеса и колеса привода, что удерживает роторы от их движения вдоль линии своей оси.
На приведенном чертеже дан общий вид предложенного гироскопического устройства с показом направления вращения роторов ω1 и вала привода ω2, также направления векторов возникающих при этом гироскопических сил F, моментов количества движения К и центробежных сил Р. Один из роторов дан в разрезе фронтальной плоскостью, а часть опорного колеса и колеса привода, примыкающие к изображению этого ротора, показаны с местным разрезом.
Гироскопическое устройство содержит два обособленных ротора 1, не связанных между собой валом или осью, расположенных на общей линии O1-O1 оси роторов по обеим сторонам от перпендикулярной ей линии О2-О2 оси вала 2 привода на равном расстоянии от этой линии оси. Пересечение линии оси роторов и линии оси вала привода является центральной точкой О гироскопического устройства. На основании 3 гироскопического устройства закреплено соосно валу 2 привода коническое зубчатое опорное колесо 4, а роторы снабжены соосно соединенными с ними коническими колесами 5, входящими в зацепление с опорным колесом 4 с диаметрально противоположных его сторон, что обеспечивает возможность вращения роторов 1 вокруг линии О1-О1 их оси в противоположных направлениях относительно друг друга. Колеса 5 роторов наряду с зубчатыми венцами 6 имеют гладкие ободы 7. В боковой поверхности опорного колеса 4, обращенной в сторону центральной точки О гироскопического устройства, выполнен концентрический круговой паз 8, в котором размещены гладкие ободы 7 колес 5 роторов, находящихся в постоянном соприкосновении с внешней стороной кругового паза 8 опорного колеса. При этом место соприкосновения кругового паза опорного колеса с ободом 7 каждого колеса ротора и находящиеся в зацеплении зубчатый венец 6 опорного колеса 4 и зубчатый венец 6 каждого колеса 5 ротора совмещены с прямой линией, проходящей через центральную точку О гироскопического устройства, что обеспечивает равенство передаточных отношений между зубчатыми венцами колеса ротора и опорного колеса, а также между ободом 7 колеса ротора и сопрягающейся с ним внешней стороной кругового паза 8 опорного колеса.
Диаметры колес 5 роторов меньше диаметра опорного колеса 4, что обеспечивает свободное размещение обода 7 колеса 5 ротора в круговом пазу 8 опорного колеса 4 с возможностью надежного постоянного соприкосновения обода 7 с внешней наклонной стороной 12 кругового паза 8. При этом гироскопическая сила F через наклонную сторону кругового паза передается от ротора на опорное колесо 4 и основание 3 гироскопического устройства. Колеса роторов размещены в углублениях 9 в боковых поверхностях роторов 1. На валу 2 привода соосно закреплено колесо 10 привода, которое выполнено так же, как и опорное колесо 4, и подвижно связано с колесами 5 роторов аналогичным образом. Вращение роторов 1 одновременно вокруг линии О1-О1 своей оси и линии О2-О2 оси вала 2 привода, что равнозначно их вращению относительно центральной точки О гироскопического устройства, обеспечивает возможность создания ими действующих на опорное колесо 4 и основание 3 гироскопического устройства гироскопических сил F и моментов количества движения К. Векторы первых из них направлены от каждого ротора через место соприкосновения 12 обода 7 колеса ротора с круговым пазом 8 опорного колеса параллельно линии О2-О2 оси вала 2 привода, а вторых - вдоль линии оси вала привода. Центробежная сила Р, действующая на каждый ротор при вращении его вокруг линии О2-О2 оси вала 2 привода, передается через обод 7 колеса 5 ротора на внешнюю стенку 12 кругового паза 8 опорного колеса и колеса привода 10, что удерживает роторы от их движения вдоль линии О1-О1 своей оси.
Места соприкосновения 12 ободов 7 колес 5 роторов с внешними стенками кругового паза 8 и зацепляющиеся зубчатые венцы 6 колеса 5 ротора и опорного колеса 4 совмещены с боковыми образующими линиями виртуальных конусов, вершины которых совмещены с центральной точкой О гироскопического устройства, что исключает возможность скольжения ободов 7 колес 5 роторов по внешней стороне кругового паза 8 при вращении колес 5 роторов. Взаимодействие этих сопрягающихся элементов возможно только путем их перекатывания, что исключает возможность их ускоренного износа с соответствующей потерей энергии.
Гироскопическое устройство работает следующим образом.
Вращающийся вал 2 привода и зубчатое колесо 10 привода приводят во вращение зубчатые колеса 5 роторов вместе с соединенными с ними роторами 1. При этом зубчатые венцы 6 колес роторов перекатываются без скольжения по зубчатому венцу опорного колеса 4, что приводит роторы во вращение одновременно вокруг линии О1-О1 оси роторов ω1 и линии O2-O2 оси вала привода ω2, что равнозначно их вращению относительно центральной точки О. При этом роторы вращаются ω1 вокруг линии О1-О1 оси роторов в противоположных направлениях относительно друг друга, поскольку колеса 5 роторов находятся в зацеплении с неподвижным опорным колесом 4 с диаметрально противоположных его сторон. Векторы возникающих при этом гироскопических сил F от каждого ротора направлены параллельно линии О2-О2 оси вала привода 2. Это обусловлено тем, что гироскопические силы F стремятся кратчайшим путем установить оси вращения роторов параллельно линии О2-О2 оси вала привода 2, вокруг которой они совершают вращение, причем так, чтобы и вращение ω2 роторов вокруг линии оси вала 2 привода и собственное вращение ω1 роторов вокруг линии О1-О1 своей оси происходили в одну и ту же сторону (см. Словарь, стр.126/3). Гироскопические силы F через ободы 7 колес роторов и внешнюю сторону 12 кругового паза 8 передаются на опорное колесо 4 и основание 3 гироскопического устройства. При этом не применяются оси, рычаги или плечи сил. В связи с этим отпадает необходимость учитывать характерное для обычных (известных) гироскопов и гироскопических устройств действие пары сил на подшипники оси с соответствующим устранением указанного недостатка (см. Словарь, стр.126-127).
Векторы К моментов количества движения роторов 1 направлены вдоль линии О2-О2 оси вала привода 2, проходящей через центральную точку О, поскольку вектор К момента количества движения каждого ротора относительно этой точки направлен перпендикулярно к плоскости, в которой совершают круговое движение материальные точки роторов 1, причем так, что из конца вектора К вращение ω2 материальных точек роторов относительно центральной точки О гироскопического устройства видно происходящим против часовой стрелки (см. ПС, стр.310/1).
При вращении роторов 1 вокруг линии О2-О2 оси вала привода возникают центробежные силы Р, которые стремятся отбросить роторы от этой линии оси их вращения. В связи с отсутствием непосредственной связи между роторами в виде вала или жесткой оси, роторы удерживаются от движения вдоль линии О1-О1 оси при помощи опоры ободов 7 колес роторов на внешние стороны круговых пазов 8 опорного колеса 4 и колеса 10 привода. При этом положение роторов относительно друг друга по окружности сохраняется неизменным в связи с зацеплением их зубчатых венцов 6 с соответствующими зубчатыми венцами опорного колеса 4 и колеса 10 привода.
Из особенностей устройства и показанного выше функционирования предложенного изобретения следует, что оно является двухступенчатой системой гироскопов.
Первыми ступенями системы являются два ротора 1, совершающих вращение ω1 вокруг линии О1-О1 оси роторов с одновременным вынужденным вращением (поворотом) ω2 вокруг линии O2-О2 оси вала 2 привода. При этих условиях проявляются свойства каждого из роторов как гироскопа с двумя степенями свободы, создающего силу F.
Второй ступенью системы является гироскоп, ротором которого служит совокупность масс двух роторов 1 как единое целое, совершающая вращение вокруг линии О2-О2 оси вала привода. Вторая ступень системы является гироскопом с двумя степенями свободы, поскольку при принудительном вращении (повороте) этой системы вокруг какой-либо иной оси, не совпадающей с направлением линии О2-О2 оси вала 2 привода (например, перпендикулярно к ней), эта система будет сопротивляться изменению направления своей линии О2-О2 оси и вала 2 привода. В связи с этим все заявленное устройство в целом будет обладать свойствами гироскопа с двумя ступенями свободы с возможным использованием в соответствующем качестве. При указанных условиях принудительного вращения (поворота) системы вокруг иной оси, каждый из роторов 1 будет обладать свойствами гироскопа с тремя степенями свободы, поскольку при указанных выше условиях роторы 1 приобретают возможность вращения вокруг трех линий осей - О1-О1, О2-О2 и указанной третьей (иной) линии оси возможного принудительного вращения (поворота).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2334196C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2006 |
|
RU2335737C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО С УРАВНОВЕШЕННЫМИ ГИРОСКОПИЧЕСКИМИ СИЛАМИ | 2008 |
|
RU2370731C1 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2357211C1 |
| СПОСОБ УРАВНОВЕШИВАНИЯ ГИРОСКОПИЧЕСКИХ СИЛ И ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2398188C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2178107C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2000 |
|
RU2178108C2 |
| ГИРОСКОПИЧЕСКОЕ УСТРОЙСТВО | 2008 |
|
RU2357210C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2277655C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2005 |
|
RU2279596C1 |
Изобретение относится к гироскопическим устройствам и может быть использовано, в частности, на средствах передвижения. Устройство содержит два ротора 1, зубчатые колеса которых находятся в зацеплении с закрепленным в основании 3 опорным колесом 4 и с установленным на вале привода 2 колесом привода 10, которое приводит во вращение колеса роторов с обкатыванием их по зубчатому венцу неподвижного опорного колеса. Колеса роторов имеют гладкие ободы 7, находящиеся в постоянном соприкосновении с внешними сторонами 12 концентрических круговых пазов опорного колеса и колеса привода, что удерживает роторы от движения в сторону от оси вращения под действием центробежных сил. Колеса роторов размещены соосно в углублениях 9 в боковых поверхностях роторов. Центры масс 11 роторов и места соприкосновения ободов колес роторов с внешней стороной кругового паза опорного колеса находятся на линии векторов гироскопических сил, что обеспечивает направление гироскопических сил и моментов количества движения на основание 3 через опорное колесо 4. Техническим результатом является повышение надежности и расширение области применения. 1 ил.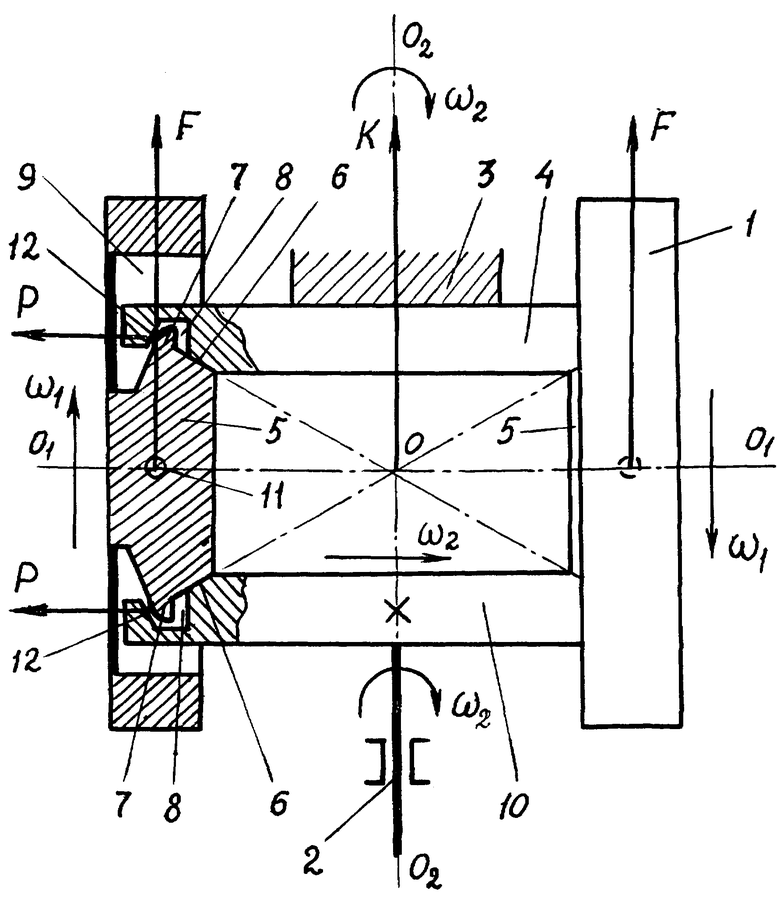
Гироскопическое устройство, ротор которого создает гироскопическую силу с направлением вектора силы перпендикулярно оси собственного вращения, при этом вектор момента количества движения ротора направлен перпендикулярно к плоскости, в которой совершает вынужденное вращение линия оси ротора, отличающееся тем, что гироскопическое устройство содержит два обособленных ротора, несвязанных между собой осью, расположенных на общей линии оси роторов по обеим сторонам от перпендикулярной ей линии оси вала привода на равном расстоянии от этой линии оси, пересечение линии оси роторов и линии оси вала привода является центральной точкой гироскопического устройства, на основании гироскопического устройства закреплено соосно валу привода коническое зубчатое опорное колесо, а роторы снабжены соосно соединенными с ними коническими колесами, входящими в зацепление с опорным колесом с диаметрально противоположных его сторон, что обеспечивает возможность вращения роторов вокруг линии их оси в противоположных направлениях относительно друг друга, колеса роторов наряду с зубчатыми венцами имеют гладкие ободы, в боковой поверхности опорного колеса, обращенной в сторону центральной точки гироскопического устройства, выполнен концентрический круговой паз, в котором размещены гладкие обода колес роторов, находящиеся в постоянном соприкосновении с внешней стороной кругового паза опорного колеса, при этом место соприкосновения кругового паза опорного колеса с ободом каждого колеса ротора и находящиеся в зацеплении зубчатый венец опорного колеса и зубчатый венец каждого колеса ротора совмещены с прямой линией, проходящей через центральную точку гироскопического устройства, диаметры колес роторов меньше диаметра опорного колеса, а сами колеса роторов размещены в углублениях в боковых поверхностях роторов, на валу привода соосно закреплено колесо привода, которое выполнено также, как и опорное колесо и подвижно связано с колесами роторов аналогичным образом, вращение роторов одновременно вокруг линии своей оси и линии оси вала привода, что равнозначно их вращению относительно центральной точки гироскопического устройства, обеспечивает возможность создания ими действующих на опорное колесо и основание гироскопического устройства гироскопических сил и моментов количества движения, векторы первых из них направлены от каждого ротора через место соприкосновения обода колеса ротора с круговым пазом опорного колеса параллельно линии оси вала привода, а вторых - вдоль линии оси вала привода, центробежные силы, действующие на роторы при вращении их вокруг линии оси вала привода, передаются через обеды колес роторов на внешние стенки круговых пазов опорного колеса и колеса привода, что удерживает роторы от их движения вдоль линии своей оси.
| НИКИТИН Н.Н | |||
| Курс теоретической механики | |||
| - М.: Высшая школа, 1990, с.514 | |||
| МНОГОКАНАЛЬНЫЙ АМПЛИТУДНЫЙ АНАЛИЗАТОР | 0 |
|
SU369396A1 |
| Способ получения фосфата алюминия | 1974 |
|
SU559895A1 |
| US 3662608 А, 16.05.1972 | |||
| Феррорезонансный стабилизатор переменного напряжения | 1979 |
|
SU911490A2 |
| GB 544094 А, 27.03.1942. | |||

