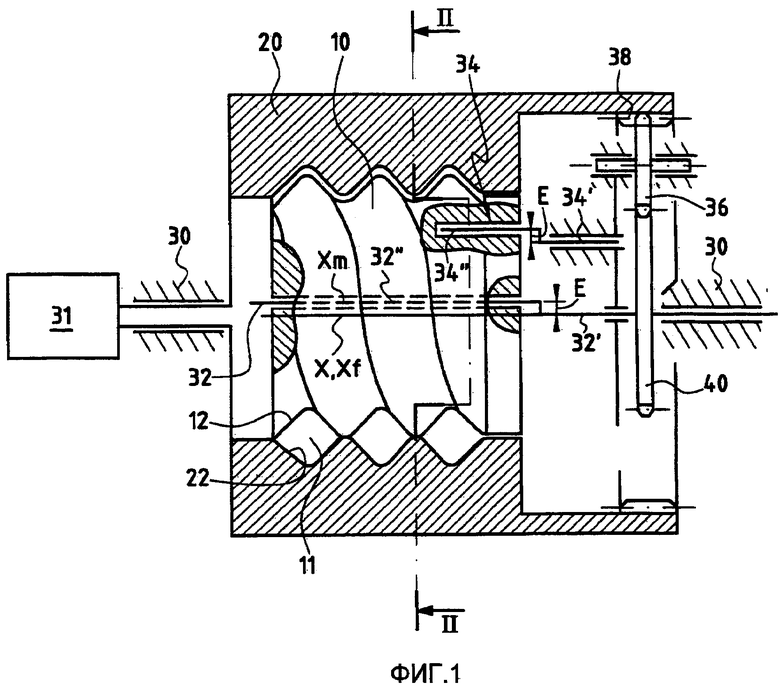
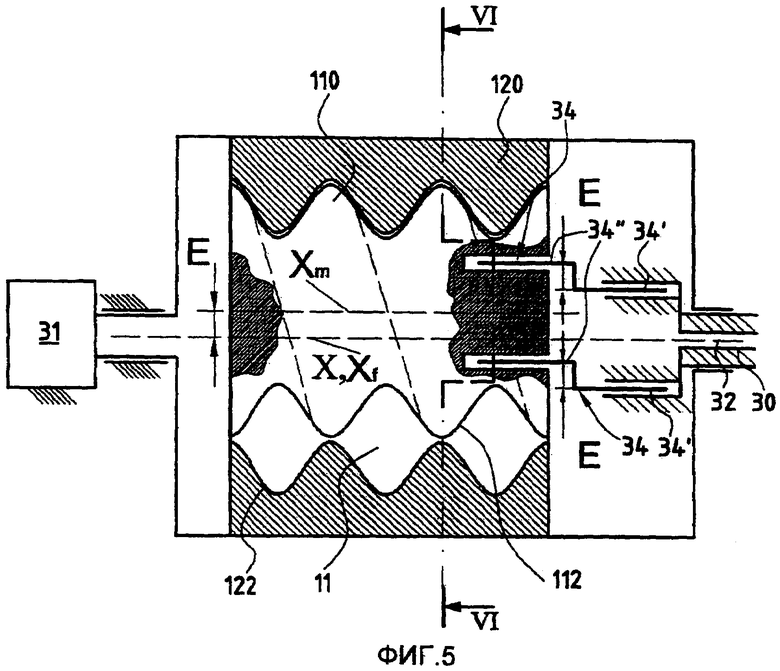
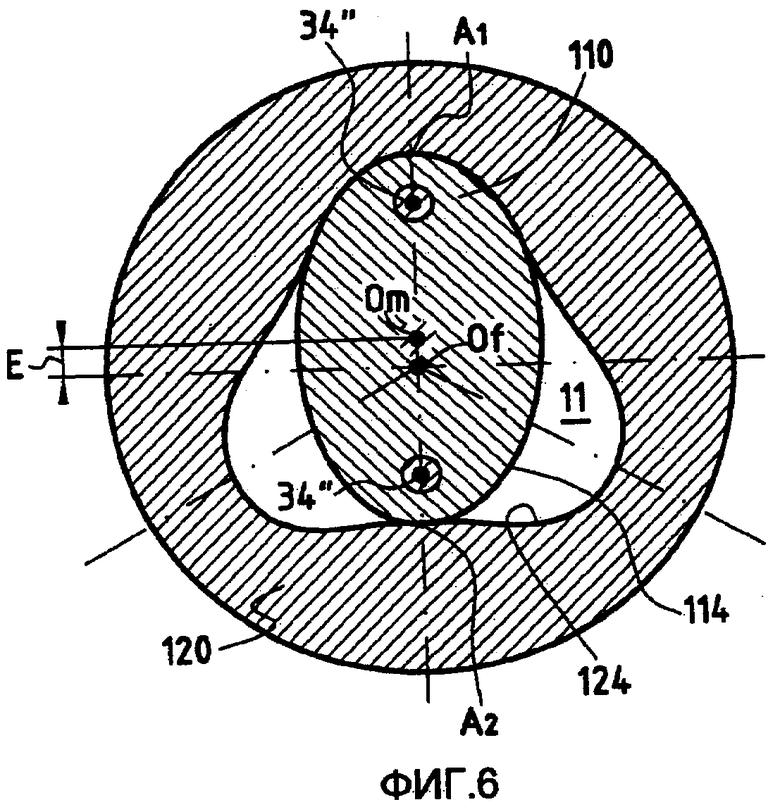
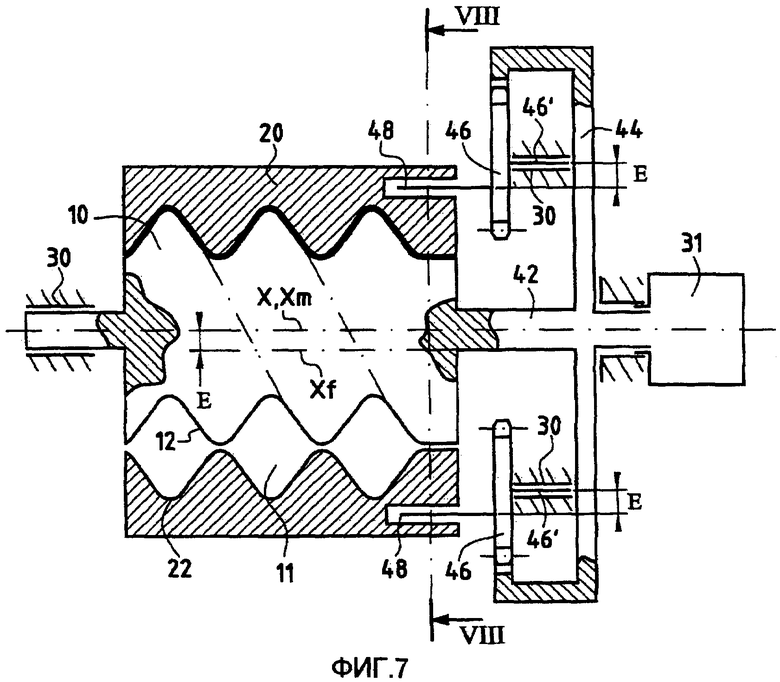
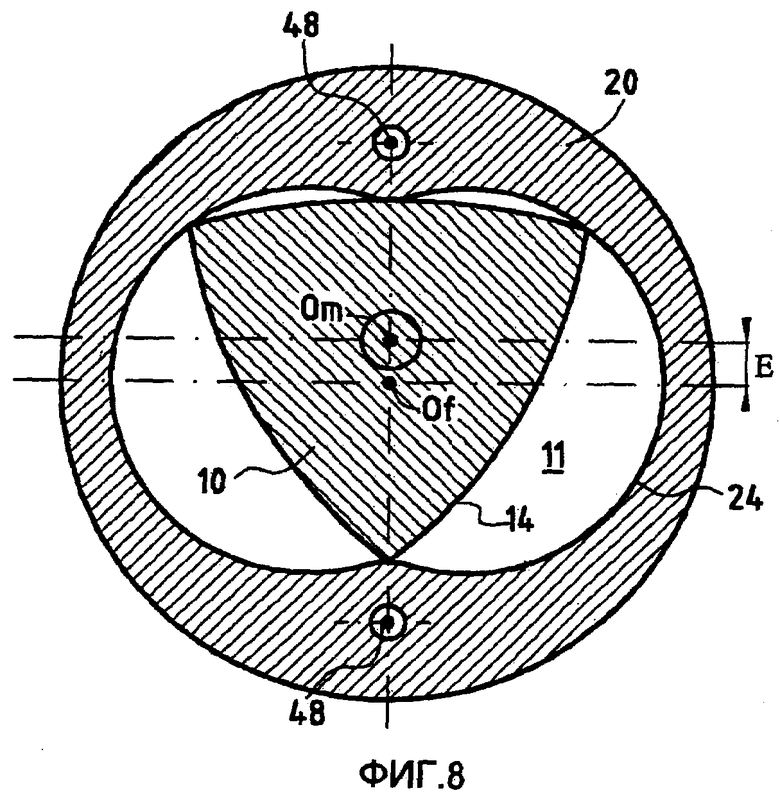
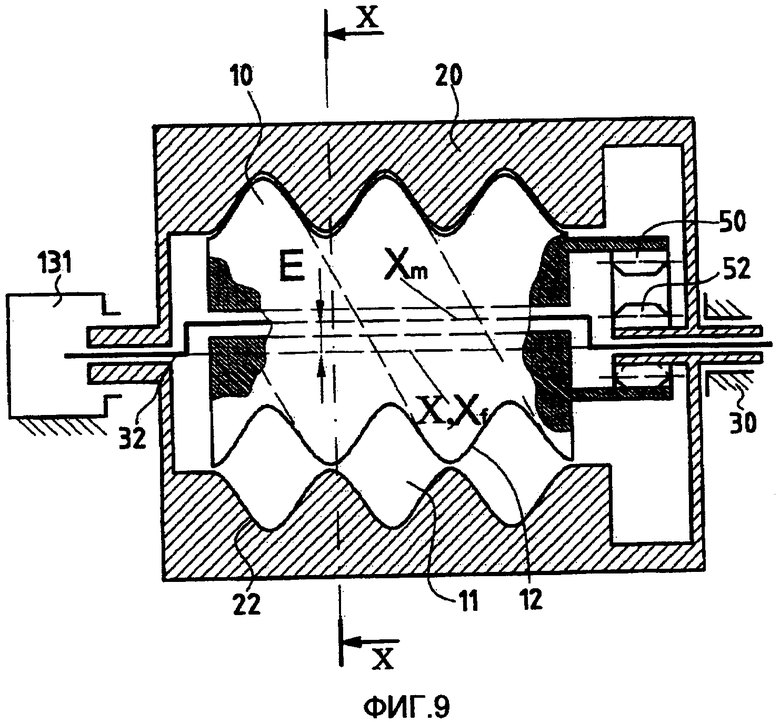
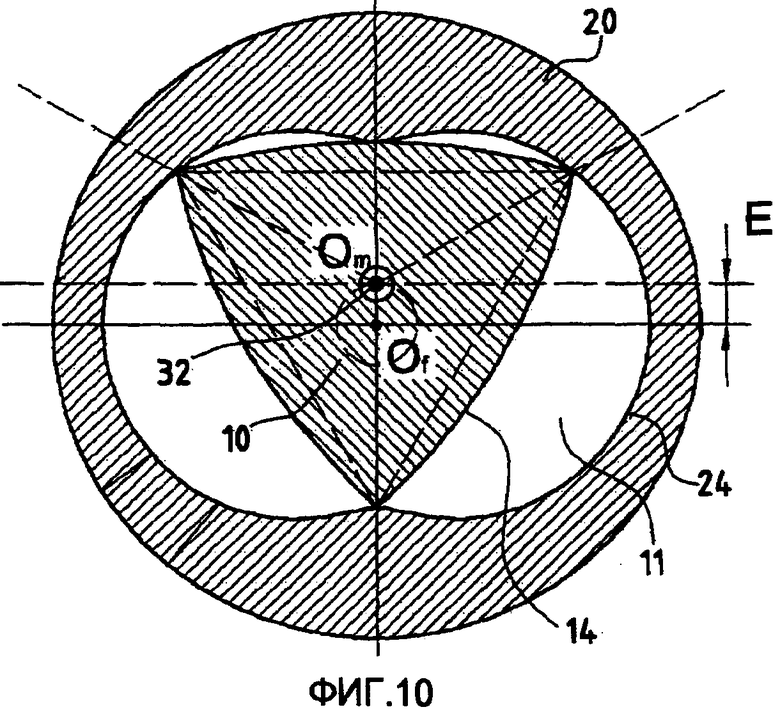
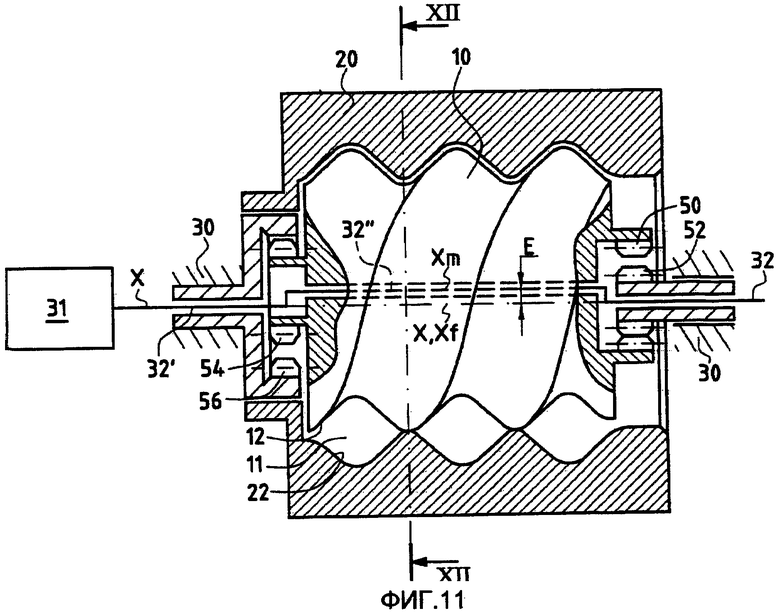
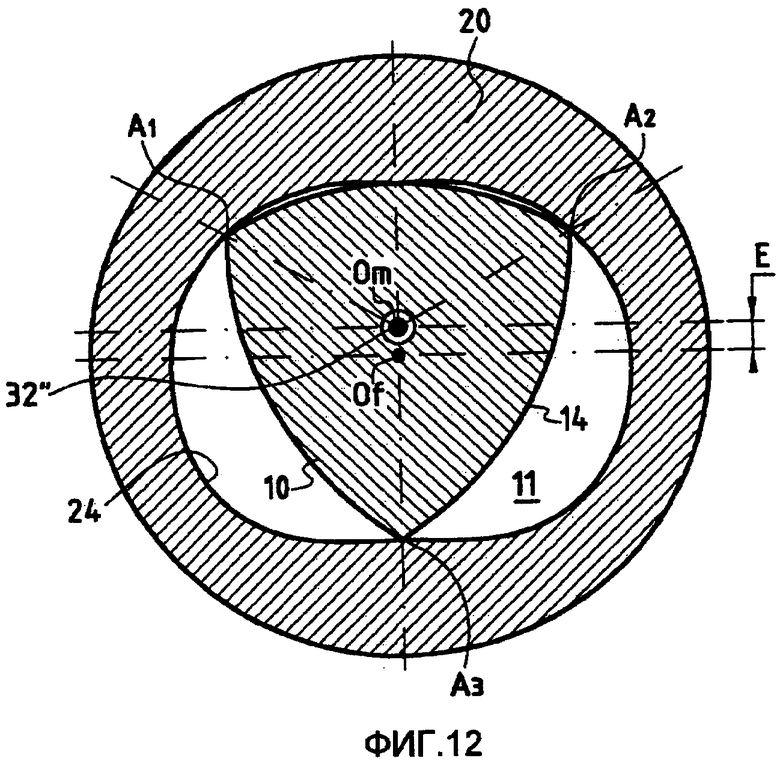
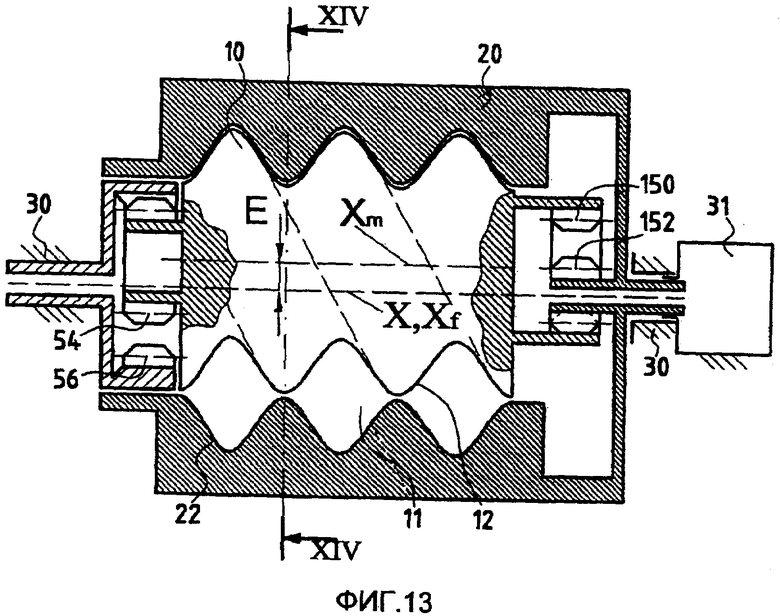
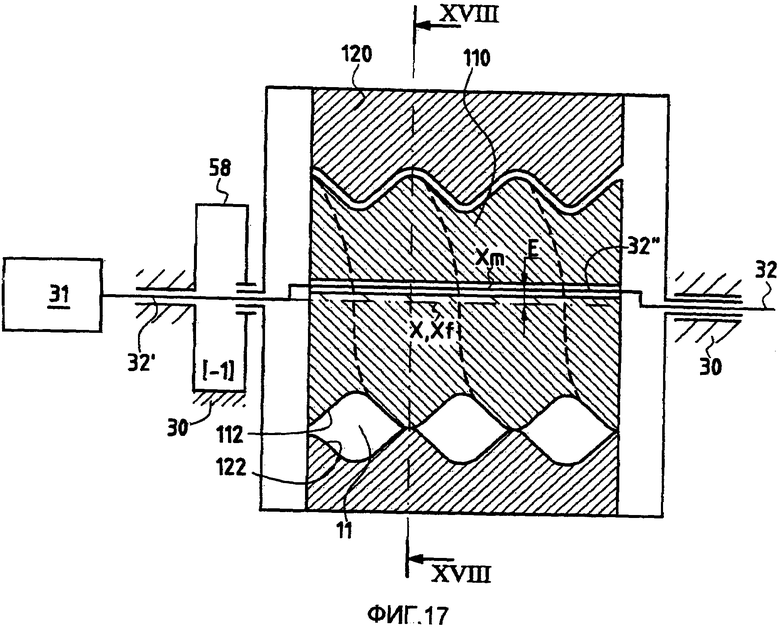
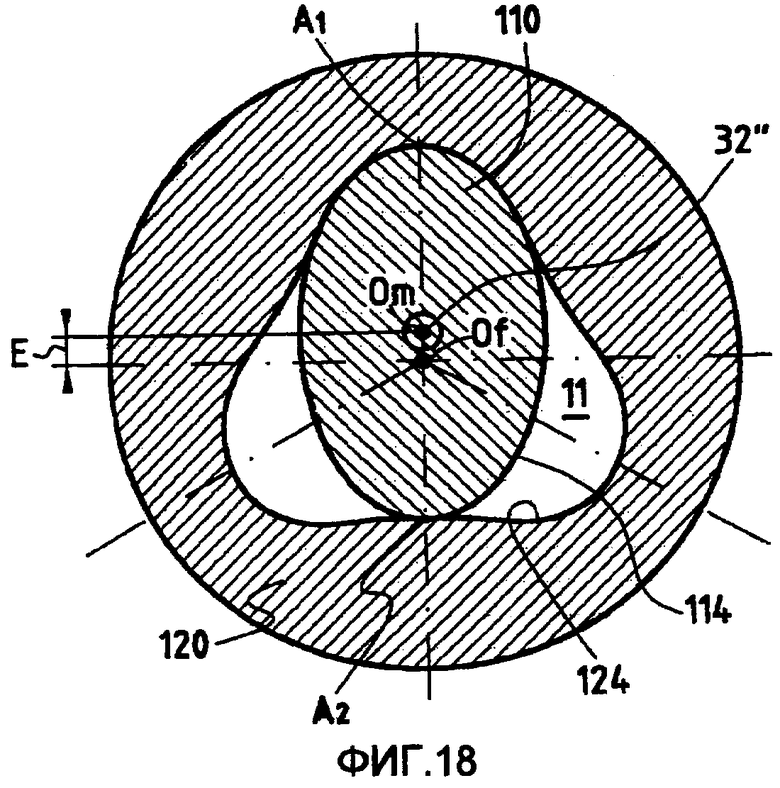
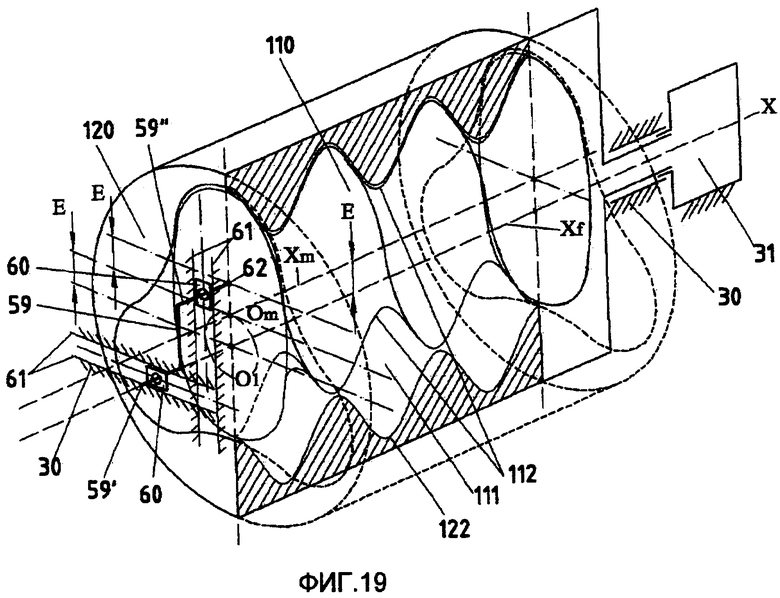
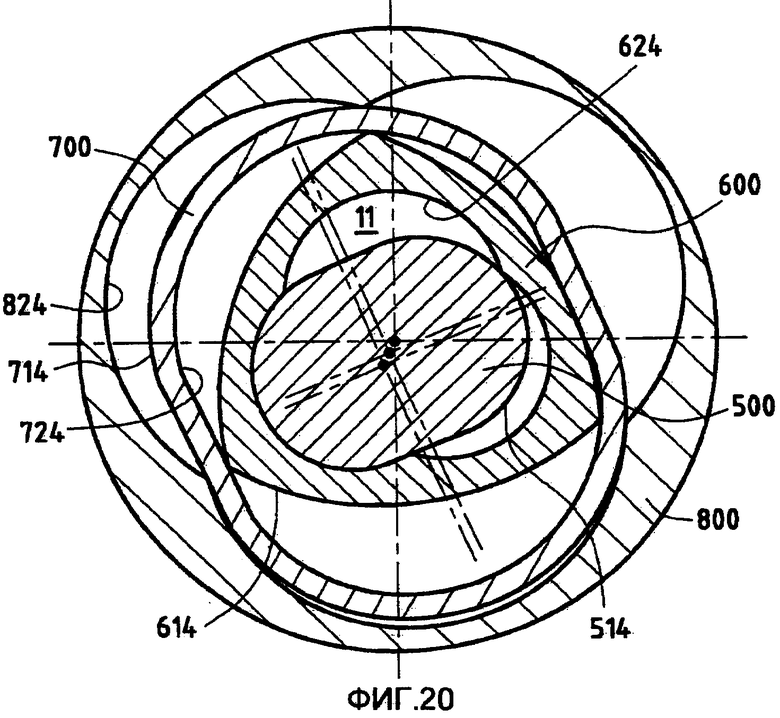
Изобретение относится к роторной винтовой машине объемного типа. Машина содержит корпус (30), имеющий основную ось X, и два элемента (10, 20), при этом первый элемент (20) окружает второй элемент (10). Первый элемент (20) шарнирно установлен в корпусе (30) и сам может поворачиваться вокруг своей оси (Xf), совпадающей с основной осью X, согласно поворотному движению, в то время как ось (Хm) второго элемента (10) обращается вокруг оси первого элемента (Xf) согласно движению обращения с длиной Е в качестве радиуса. Машина дополнительно содержит синхронизатор (34; 36; 38; 40), синхронизирующий поворотное движение и движение обращения так, что рабочая среда совершает объемное перемещение, по меньшей мере, в одной рабочей камере (11), ограниченной наружной поверхностью (22) первого элемента (20) и внутренней поверхностью (12) второго элемента (10). Задача изобретения - расширение технического и функциональных потенциалов, уменьшение угловой протяженности термодинамических циклов, повышение КПД и уменьшение общих тепловых потерь машины. 2 н. и 18 з.п. ф-лы, 22ил.
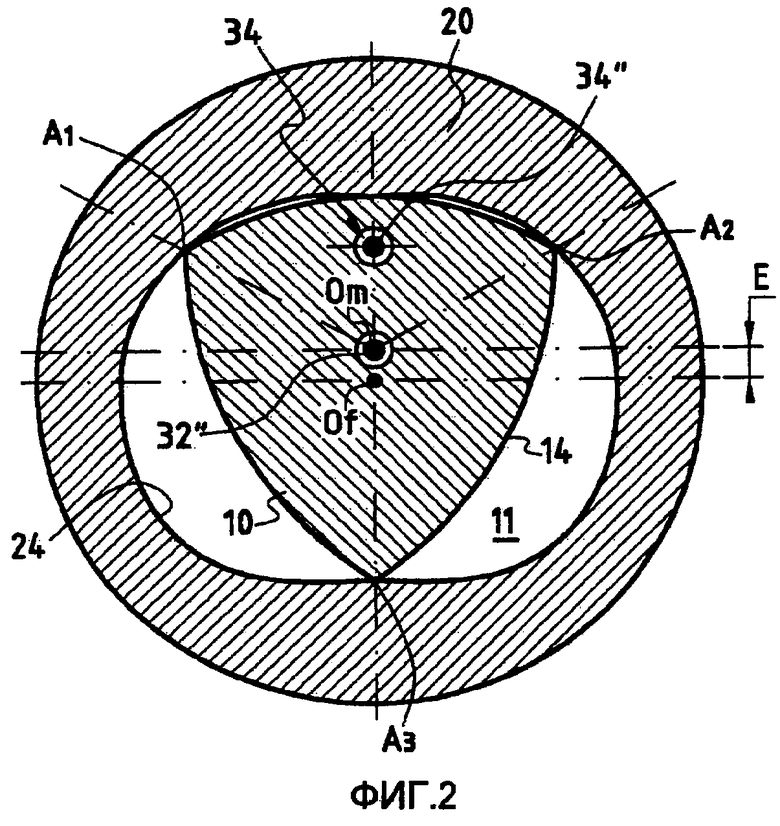
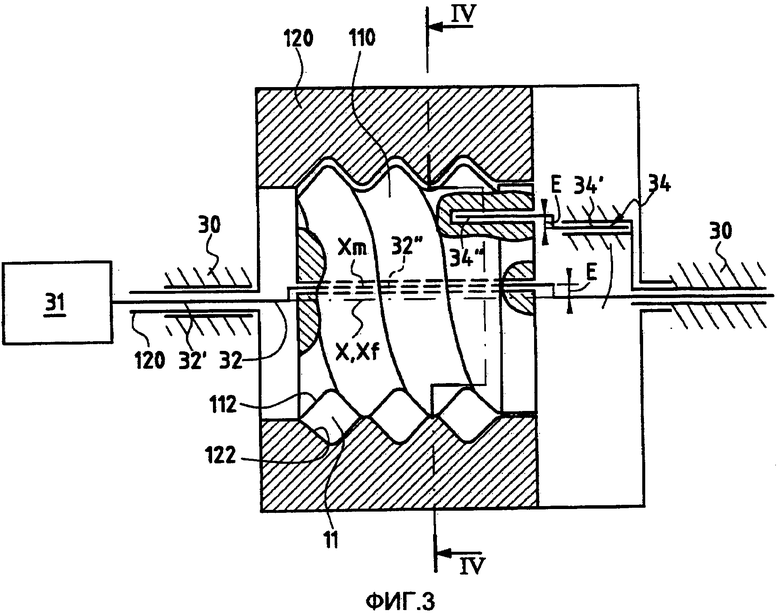
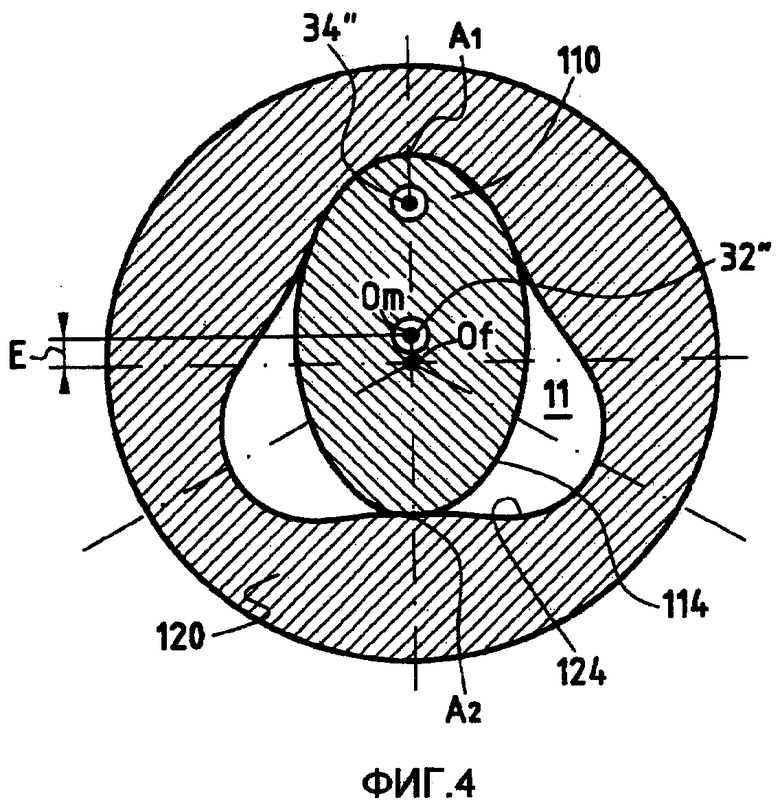
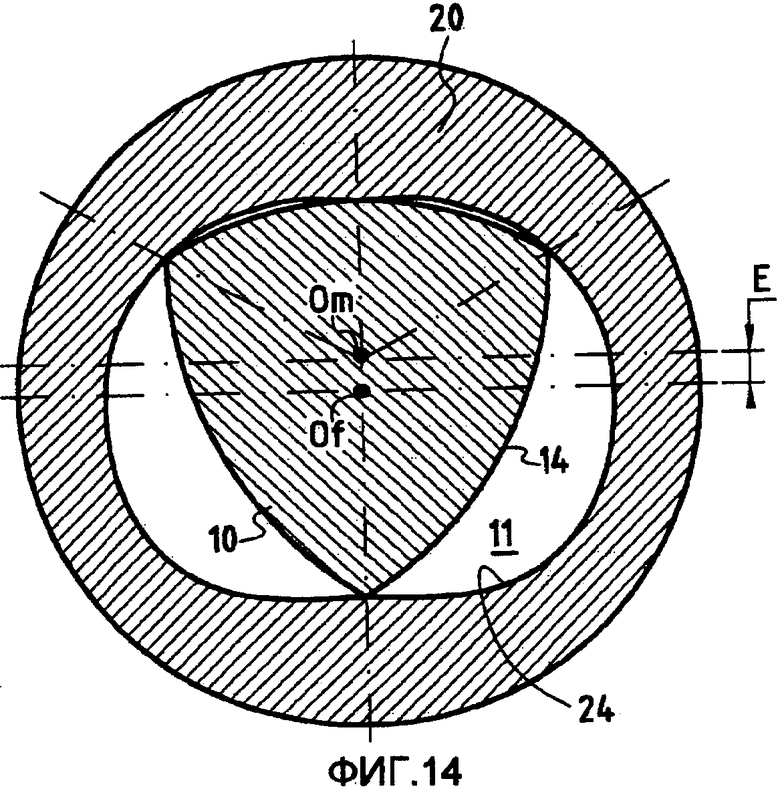
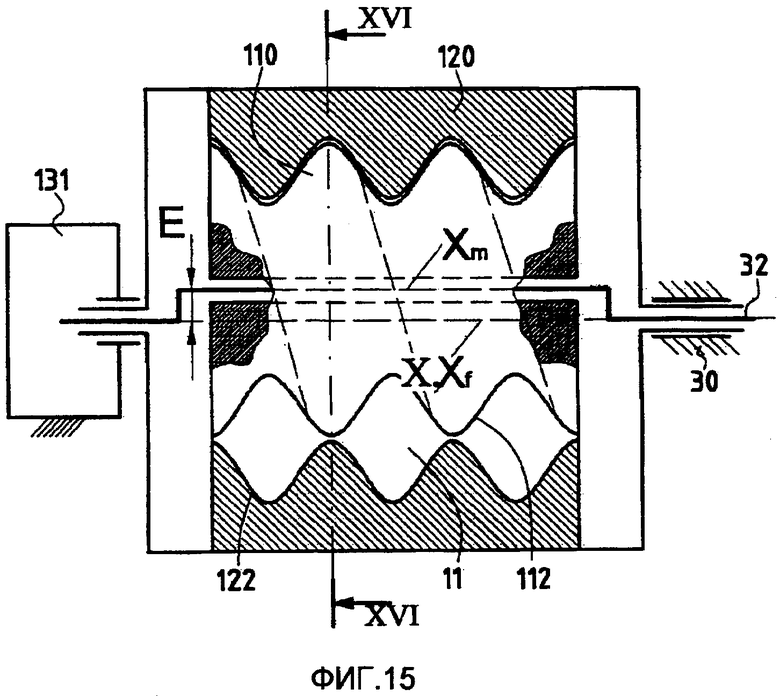
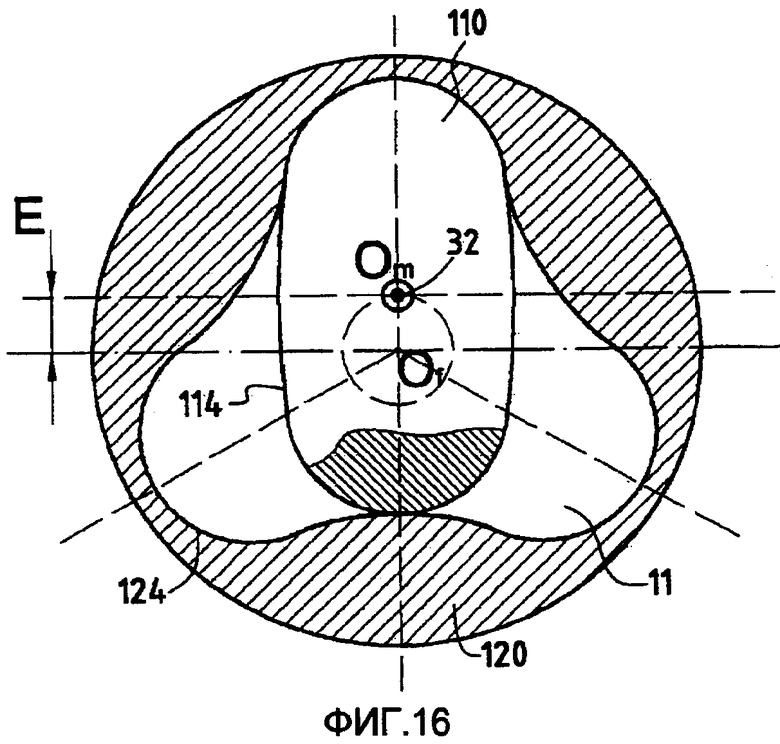
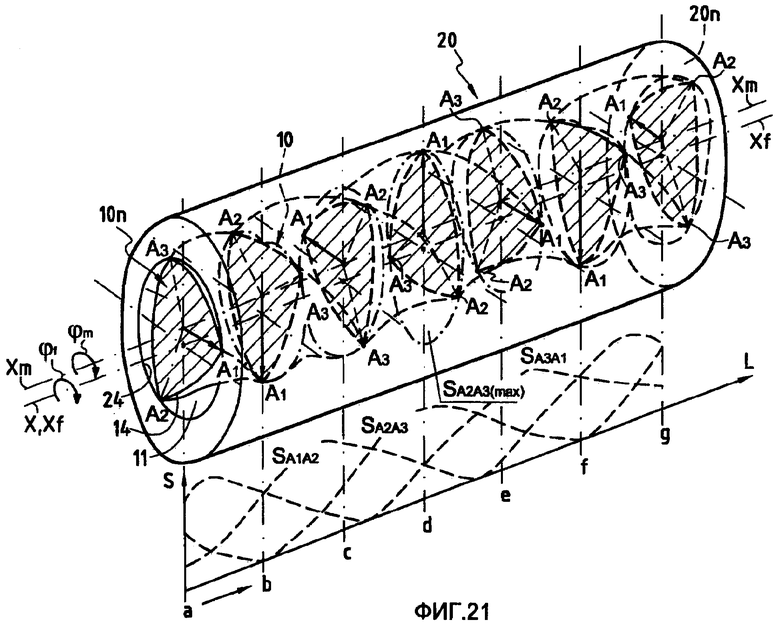
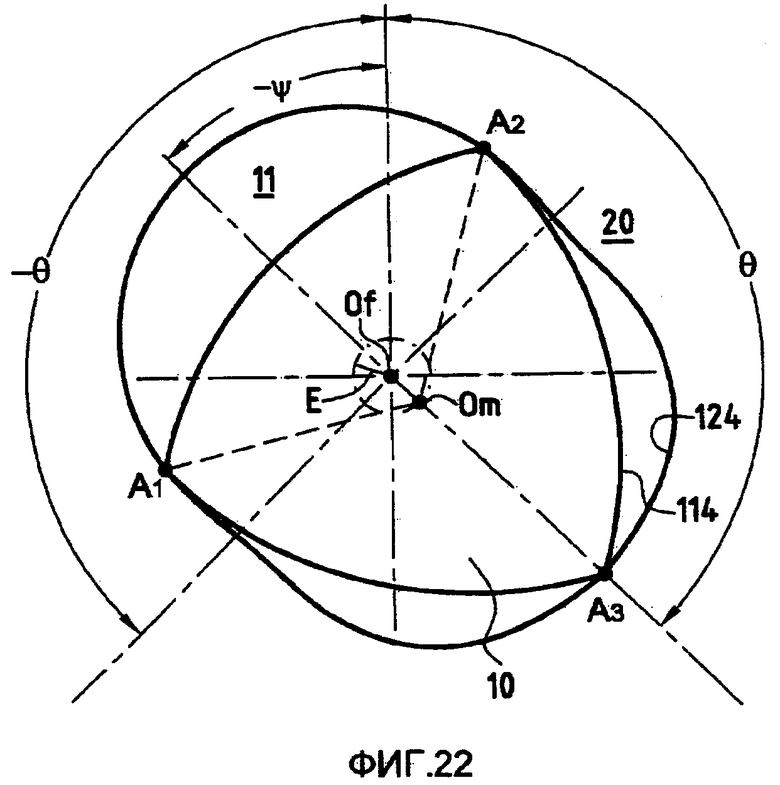
1. Роторная винтовая машина объемного типа, содержащая корпус (30), имеющий основную ось X, два элемента, состоящие из охватываемого элемента (10; 110; 500; 600; 700) и охватывающего элемента (20; 120; 600; 700; 800), окружающего охватываемый элемент, в которой наружная поверхность охватываемого элемента (10; 110; 500; 600; 700) определяет охватываемую поверхность (12; 112), а внутренняя поверхность охватывающего элемента определяет охватывающую поверхность (22; 122), при этом охватываемая (12; 112) и охватывающая (22; 122) поверхности представляют собой спиральные поверхности, имеющие соответствующие оси Хm и Xf, которые параллельны и отстоят друг от друга на длину Е, причем охватываемая (12; 112) и охватывающая (22; 122) поверхности образуют, по меньшей мере, одну рабочую камеру (11) посредством формирования линейных контактов (А1, А2, А3) охватываемой (12; 112) и охватывающей (22; 122) поверхностей и относительного перемещения охватываемого (10; 110; 500; 600; 700) и охватывающего (20; 120; 600; 700; 800) элементов, при этом охватываемая (12; 112) и охватывающая (22; 122) поверхности, кроме того, образованы вокруг осей Хm и Xf посредством номинального профиля в поперечном сечении механизма, причем профиль охватываемой поверхности (12; 112), определяющий охватываемый профиль (14; 114; 514; 614; 714), имеет порядок симметрии Nm по отношению к центру Оm, расположенному на оси Хm охватываемого элемента, а профиль охватывающей поверхности (22; 122), определяющий охватывающий профиль (24; 124; 624; 724; 824), имеет порядок симметрии Nf по отношению к центру Of, расположенному на оси Xf охватывающего элемента, при этом роторная винтовая машина дополнительно имеет основное синхронизирующее соединение, содержащее кривошипообразный механизм (32; 34; 48; 59), создающий эксцентриситет Е между основной осью X и одной из осей (Хm и Xf), отличающаяся тем, что первый из охватываемого (10; 110; 500; 600; 700) и охватывающего (20; 120; 600; 700; 800) элементов шарнирно установлен в корпусе (30) с возможностью вращения вокруг своей фиксированной оси (Xm; Xf) согласно вращательному движению; при этом кривошипообразный механизм (32; 34; 48; 59) подсоединен ко второму из охватываемого (10; 110; 600; 700) и охватывающего (20; 120; 600; 700) элементов, чтобы обеспечить обращение оси (Xf; Xm) второго элемента вокруг фиксированной оси первого элемента (Xm; Xf) согласно орбитальному движению обращения с длиной Е в качестве радиуса; причем роторная винтовая машина содержит основной синхронизатор (34; 40; 36; 38; 44; 46; 48; 54; 56; 58), синхронизирующий поворотное движение и орбитальное движение обращения по отношению друг к другу, так что охватываемая (12; 112) и охватывающая (22; 122) поверхности входят в зацепление друг с другом, при этом любые два из трех вращений синхронизируются по отношению друг к другу, а именно: вращение одного из смежных элементов вокруг его фиксированной оси, обращение оси элемента, совершающего планетарное движение со звеном синхронизирующего соединения, и поворотное движение элемента с подвижной осью.2. Машина по п.1, отличающаяся тем, что она дополнительно содержит вращательное передаточное средство (31; 131), соединенное с кривошипным средством (32; 59) или с первым элементом (10; 110; 500; 600; 700; 20; 120; 600; 700; 800).3. Машина по п.2, отличающаяся тем, что вращательное передаточное средство (131) представляет собой двухканальное вращательное средство (131).4. Машина по любому одному из предшествующих пунктов, отличающаяся тем, что охватываемую (12; 112) и охватывающую (22; 122) поверхности приводят в механический контакт, формирующий кинематическую пару, обеспечивающую передачу движения между первым (10; 110; 500; 600; 700) и вторым (20; 120; 600; 700; 800) элементами.5. Машина по п.1, отличающаяся тем, что она содержит дополнительный синхронизатор (50; 52), связанный с корпусом и обеспечивающий возможность вращения второго элемента (20; 120; 600; 700; 800; 10; 110; 500; 600; 700) вокруг его оси.6. Машина по п.5, отличающаяся тем, что дополнительный синхронизатор содержит планетарную передачу (50, 52).7. Машина п.5, отличающаяся тем, что она дополнительно содержит вращательное передаточное средство (31; 131), подсоединенное к кривошипному средству (32; 34; 48; 59) и к одному из охватываемого (10; 110; 500; 600; 700) или охватывающего (20; 120; 600; 700; 800) элементов.8. Машина по п.1, отличающаяся тем, что синхронизатор дополнительно содержит кинематический механизм (40; 36; 38; 44; 46; 48) соединения обоих указанных элементов (10; 500; 600; 700; 20; 600; 700; 800) друг с другом, при этом кинематический соединительный механизм содержит, по меньшей мере, одно соединительное устройство (36; 46), которое шарнирно установлено в корпусе (30).9. Машина по п.8, отличающаяся тем, что кинематический соединительный механизм содержит шестеренную передачу (40; 36; 38; 44; 46; 48).10. Машина по п.1, отличающаяся тем, что синхронизатор содержит планетарную передачу (54; 56).11. Машина по п.1, отличающаяся тем, что синхронизатор содержит инвертор (58).12. Машина по п.1, отличающаяся тем, что синхронизатор содержит кулисный механизм (59; 60; 61).13. Машина по п.1, отличающаяся тем, что она содержит, по меньшей мере, одни дополнительные охватываемый и охватывающий элементы (500; 600; 700; 600; 700; 800), расположенные по линии с упомянутыми охватываемым и охватывающим элементами.14. Машина по п.1, отличающаяся тем, что она дополнительно содержит, по меньшей мере, третий элемент, расположенный внутри или окружающий упомянутые охватываемый и охватывающий элементы (500; 600; 700; 600; 700; 800) таким образом, что их поверхности находятся в механическом контакте, чтобы сформировать дополнительные камеры (11).15. Машина по п.1, отличающаяся тем, что порядок симметрии Nf охватывающего элемента равен Nm-116. Машина по п.1, отличающаяся тем, что порядок симметрии Nf охватывающего элемента равен Nm+1.17. Способ преобразования движения в объемной винтовой машине, содержащий а) создание взаимосвязанного движения винтовых сопряженных элементов в форме охватываемого и охватывающего элементов и звеньев синхронизирующего соединения с помощью превращенных положительных потоков механической энергии и энергии рабочего вещества в рабочих камерах объемной винтовой машины; b) приведение одного из охватываемого и охватывающего элементов в планетарное движение с двумя степенями свободы механического вращения, одна из которых представляет собой независимую степень свободы по отношению к фиксированной центральной оси другого элемента; с) передачу потоков превращаемой положительной энергии посредством независимой степени свободы механического вращения машины, любые два из трех вращений синхронизируют по отношению друг к другу, а именно: вращение одного из смежных элементов вокруг его фиксированной оси, обращение оси элемента, совершающего планетарное движение со звеном синхронизирующего соединения, и поворотное движение элемента с подвижной осью.18. Способ по п.17, в котором обеспечивают создание дифференциально связанного движения охватываемого и охватывающего элементов и звеньев синхронизирующего соединения со второй независимой степенью свободы вращательного движения и передачу потока превращаемой положительной энергии в форме двух потоков посредством двух независимых степеней свободы.19. Способ по любому из пп.18 и 19, в котором третья, по меньшей мере, одна зависимая степень свободы вращательного движения может быть создана в процессе преобразования движения охватываемого и охватывающего элементов и звеньев синхронизирующего соединения и часть потока превращаемой положительной энергии внутри машины может быть использована при преобразовании движения посредством дополнительной, зависимой степени свободы механического вращения машины с понижением количества независимых степеней свободы на единицу.20. Способ по п.18, в котором угловые скорости упомянутых элементов определяют согласно следующему выражению:
k1ω1+k2ω2+ω3=0,
где: ω1, ω2 - угловые скорости сопряженных элементов вокруг их оси;
ω3 - угловая скорость звена синхронизирующего соединения;
k1, k2 - постоянные коэффициенты соединения;
при этом значения угловых скоростей вращения сопряженных элементов определяют из следующего выражения:
(z-1)ω1-zω2+ω0=0,
где ω1 - угловая скорость вокруг своей оси элемента, огибающая поверхность которого имеет форму криволинейной поверхности;
ω2 - угловая скорость вращения вокруг своей оси элемента, огибающая поверхность которого имеет форму внутренней или наружной огибающей семейства поверхностей, образованных упомянутой криволинейной поверхностью;
ω0 - угловая скорость орбитального обращения оси элемента, совершающего планетарное движение;
z - целое число, z>1.