Изобретение относится к оптическому приборостроению, а именно к аэрофотосъемке, и может быть использовано при создании кадровых аэрофотоаппаратов с компенсацией сдвига изображения, возникающего из-за движения носителя во время съемки.
Известен механизм компенсации сдвига изображения в аэрофотоаппарате (авт. свид. СССР №23063 5, кл. G03В 1/04, опубликованное 30.10.1968 г.), выполненный в виде подпружиненной каретки, установленной, например, параллельно прижимному столу выравнивающего механизма в направляющих, кинематически связанной с приводным электродвигателем и снабженной двумя валиками, образующими накопители транспортируемой пленки.
Наиболее близким аналогом к заявляемому техническому решению является механизм компенсации сдвига изображения в аэрофотоаппарате по патенту РФ №2248026, МПК8 G03B 37/00, опубликованному 10.03.2005 г.), в котором у мерного валика и выравнивающего стола один общий привод компенсации сдвига изображения и движение каждого из них происходит в последовательности, определяемой циклограммой работы аэрофотоаппарата, посредством муфт переключения. Выравнивающий стол подпружинен кулачком, который обеспечивает движение выравнивающего стола со скоростью компенсации сдвига изображения, определяемой по формуле:
где Vиз. - скорость компенсации сдвига изображения;
W - скорость полета носителя;
Н - высота фотографирования;
γ - угол наклона аэрофотоаппарата относительно вертикали (влево или вправо по полету).
Кроме того, выравнивающий стол снабжен тормозным устройством, состоящим из двигателя и зубчатых колес, кинематически соединяющих двигатель с кулачком. Кулачок выполнен с профилем спирали Архимеда, что обеспечивает только линейное перемещение выравнивающего стола, то есть равномерное поступательное движение выравнивающего стола с выравненной на его поверхности аэрофотопленкой в направлении и со скоростью движения изображения в плоскости наилучшего изображения объектива.
Задачей изобретения является создание механизма компенсации сдвига изображения в аэрофотоаппарате с повышенными эксплуатационными характеристиками.
Технический результат - увеличение точности работы приводов и механизма компенсации сдвига изображения, увеличение надежности и расширение функциональных возможностей применения аэрофотоаппаратов при различных видах аэрофотосъемки.
Это достигается тем, что в механизме компенсации сдвига изображения, в корпусе которого содержится выравнивающий стол с приводом для возвратно-поступательного перемещения его в плоскости, перпендикулярной оптической оси аэрофотоаппарата, и приводом, тормозящим его перемещение, в отличие от известного привод перемещения и привод торможения объединены в один автономный привод, выполненный в виде моментного двигателя, который жестко закреплен на корпусе механизма компенсации со стороны выравнивающего стола, вдоль которой происходит перемещение, на валу привода моментного двигателя на шкиве одним своим концом закреплены гибкие ленты, другим концом взаимодействующие с выравнивающим столом для перемещения, дополнительно введена обратная связь в виде потенциометра, также жестко закрепленного на корпусе механизма компенсации сдвига изображения со стороны выравнивающего стола, вдоль которой происходит перемещение, выходной сигнал потенциометра зависит от положения выравнивающего стола относительно корпуса механизма компенсации сдвига изображения и, кроме того, введена магнитная связь, фиксирующая выравнивающий стол относительно корпуса механизма компенсации сдвига изображения.
Изображение поясняется чертежом.
Механизм компенсации сдвига изображения включает в себя мерный валик с приводом, взаимодействующим с прижимным валиком для перематывания аэрофотопленки (не показаны). Механизм компенсации сдвига изображения установлен в корпусе 1, в котором с возможностью возвратно-поступательного перемещения в плоскости, перпендикулярной оптической оси аэрофотоаппарата, и в направлении полета носителя (не показано) находится выравнивающий аэрофотопленку стол 2. Он выполнен в виде прямоугольника. Привод 3 выполнен в виде моментного двигателя 4, жестко закрепленного на корпусе 1 со стороны выравнивающего стола 2, вдоль которой происходит перемещение. Моментный двигатель 4 состоит из неподвижного статора 5 и вращающегося ротора 6, которые расположены в корпусе 7 моментного двигателя 4. Ротор 6 соединен с валом 8 через зубчатые колеса 9 и 10. На валу 8 закреплен шкив 11, а на нем - две гибкие ленты 12 и 13. Одни концы лент 12 и 13 закреплены на шкиве 11, а другие - на самом выравнивающем столе 2. На противоположной стороне выравнивающего стола 2, вдоль которой также происходит перемещение, на корпусе 1 жестко закреплен потенциометр 14, оснащенный шкивом 15, который соединен с выравнивающим столом 2 лентами 16 и 17.
Для фиксации положения выравнивающего стола 2 на нем установлен постоянный магнит 18. На корпусе 1 механизма компенсации сдвига изображения для взаимодействия с постоянным магнитом 18 расположен электромагнит 19, состоящий из сердечника 20 и катушки 21. В исходном положении в момент начала съемки магниты 18 и 19 притянуты друг к другу. Причем фиксирующее приспособление расположено на стороне выравнивающего стола 2, перпендикулярной его перемещению. Моментный двигатель 4 многофункциональный и в зависимости от управляющего сигнала может приводить в движение выравнивающий стол 2 с любой заданной зависимостью (с ускорением, с торможением или равномерным перемещением). Положение выравнивающего стола 2 во время цикла работы аэрофотоаппарата отслеживается потенциометром 14, который изменяет свое выходное сопротивление в зависимости от положения выравнивающего стола 2, относительно корпуса 1 механизма компенсации сдвига изображения. Этот сигнал является сигналом обратной связи для бортового компьютера, что позволяет увеличить точность перемещения выравнивающего стола 2. На обмотку катушки 21 электромагнита 19 подается управляющее напряжение при включении аэрофотоаппарата в режим «съемка».
Механизм компенсации сдвига изображения работает следующим образом. В начале работы выравнивающий стол 2 находится в исходном положении и зафиксирован постоянным магнитом 18 и электромагнитом 19. При фотографировании на обмотку катушки 21 электромагнита 19 подается напряжение, выравнивающий стол 2 освобождается от фиксированного положения и с выравненной на его выравнивающей поверхности аэрофотопленкой (не показаны) начинает движение от привода 3. На моментный двигатель 4 подается управляющий сигнал от управляющего бортового навигационного комплекса в зависимости от скорости «W» и высоты «Н» полета носителя. Ротор 6 вращается вместе с валом 8 и шкивом 11 с заданной скоростью и через зубчатое колесо 9 наматывает на шкив 11 ленту 12, соединенную другим концом с выравнивающим столом 2, чем приводит его в движение со скоростью, необходимой для компенсации сдвига изображения. В момент наилучшего сочетания скорости компенсации и скорости движения выравнивающего стола 2, о чем можно судить, получая сигнал от потенциометра 14, происходит срабатывание фотозатвора и экспонирование аэрофотопленки. По окончании экспонирования управляющим сигналом на привод 3 производится режим торможения через зубчатое колесо и гибкую ленту 13. Таким образом, моментный двигатель 4 во время всего цикла съемки управляет движением выравнивающего стола 2. По окончании экспонирования мерный валик посредством прижимного валика выбирает экспонированный кадр аэрофотопленки.
В этот момент выравнивающий стол приходит в исходное положение до следующего цикла. Во время съемки фиксация выравнивающего стола 2 не происходит, так как обмотка 21 находится под напряжением до окончания съемки.
Положение выравнивающего стола 2 во время всего цикла работы отслеживается потенциометром 14 посредством шкива 15 на его оси, кинематически связанным посредством гибких лент 16 и 17 с выравнивающим столом 2 и корпусом 1 механизма компенсации. Выходной сигнал с потенциометра 14 является сигналом обратной связи для контроля положения выравнивающего стола 2 во время компенсированного его движения.
Таким образом, разделение приводов мерного валика и выравнивающего стола, а также использование в качестве двигателя в приводе выравнивающего стола моментного двигателя обеспечивает наиболее точное, соответствующее скорости компенсации сдвига изображения, перемещение, так как в кинематической цепи от двигателя до выравнивающего стола исключены лишние сложные, понижающие редукторы, а также электрические цепи переключения движений от мерного валика к выравнивающему столу в случае одноприводной схемы. Основным же преимуществом в выборе в качестве двигателя в приводе движения выравнивающего стола моментного двигателя является обеспечение многофункциональности вращения двигателя, зависящее только от порядка подачи управляющего его вращением сигнала, то есть возможность придания движению выравнивающего стола требуемых законов, исключая однофункциональные механические кулачки, в случаях их использования в кинематических цепях приводов. Кроме этого, при использовании аэрофотоаппарата, кроме планового - перспективного, то есть фотографирования местности в направлении, отличном от вертикального направления оптической оси, возникает необходимость выравнивания скорости компенсации сдвига изображения и масштаба съемки вследствие изменения дальности до фотографируемых объектов по переднему и заднему планам снимка. В этих случаях путем выдачи управляющего сигнала по закону, учитывающему введение поправок к скорости вращения моментного двигателя, можно добиться улучшения качества снимка исключением искажений, присутствующих на снимках в случаях однофункциональных механических схем.
Преимущества предложенного технического решения по сравнению с ближайшим аналогом состоят в следующем:
- обеспечена возможность работы аэрофотоаппарата в режимах с более широким диапазоном скорости и высоты полета носителя W/H, при достижении высокого качества снимков;
- обеспечена возможность аэрофотографирования при перспективном (в сторону, вперед, назад) фотографировании при высоком качестве снимков;
- увеличена точность работы приводов компенсации и механизмов пленкопротяжного тракта при уменьшении потребляемой мощности;
- увеличена надежность работы аэрофотоаппарата;
- исключен дополнительный привод для торможения;
- упрощена конструкция.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОФОТОАППАРАТ | 2004 |
|
RU2275665C1 |
| АЭРОФОТОАППАРАТ | 2003 |
|
RU2248026C1 |
| МНОГОТРАКТОВЫЙ ЩЕЛЕВОЙ АЭРОФОТОАППАРАТ | 1992 |
|
RU2036499C1 |
| АППАРАТ АЭРОФОТОТЕЛЕВИЗИОННЫЙ | 2006 |
|
RU2307383C1 |
| АЭРОФОТОАППАРАТ (ВАРИАНТЫ) | 2004 |
|
RU2263940C1 |
| Устройство для управления аэрофотоаппаратом | 1990 |
|
SU1831651A3 |
| МЕХАНИЗМ ФОКУСИРОВКИ АЭРОФОТОАППАРАТА | 2012 |
|
RU2506618C1 |
| Устройство для управления аэрофотоаппаратом | 1991 |
|
SU1838757A3 |
| ШИРОКОУГОЛЬНЫЙ ЩЕЛЕВОЙ АЭРОФОТОАППАРАТ | 1992 |
|
RU2036500C1 |
| Аппарат для аэрофотосъемки | 1947 |
|
SU75313A1 |
Изобретение относится к оптическому приборостроению и может быть использовано при аэрофотосъемке. Механизм компенсации сдвига изображения содержит корпус, в котором содержится выравнивающий стол с приводом для возвратно-поступательного перемещения его в плоскости, перпендикулярной оптической оси аэрофотоаппарата, и приводом, тормозящим его перемещение. Привод перемещения и привод торможения объединены в один автономный привод, выполненный в виде моментного двигателя. Он жестко закреплен на корпусе механизма компенсации со стороны выравнивающего стола, вдоль которой происходит перемещение. На валу привода моментного двигателя на шкиве одним своим концом закреплены гибкие ленты, другим концом взаимодействующие с выравнивающим столом для его перемещения. Дополнительно введена обратная связь в виде потенциометра, также жестко закрепленного на корпусе механизма компенсации сдвига изображения со стороны выравнивающего стола, вдоль которой происходит перемещение. Кроме того, введена магнитная связь, фиксирующая выравнивающий стол относительно корпуса механизма компенсации сдвига изображения. Технический результат - увеличение точности, надежности и расширение функциональных возможностей. 1 ил.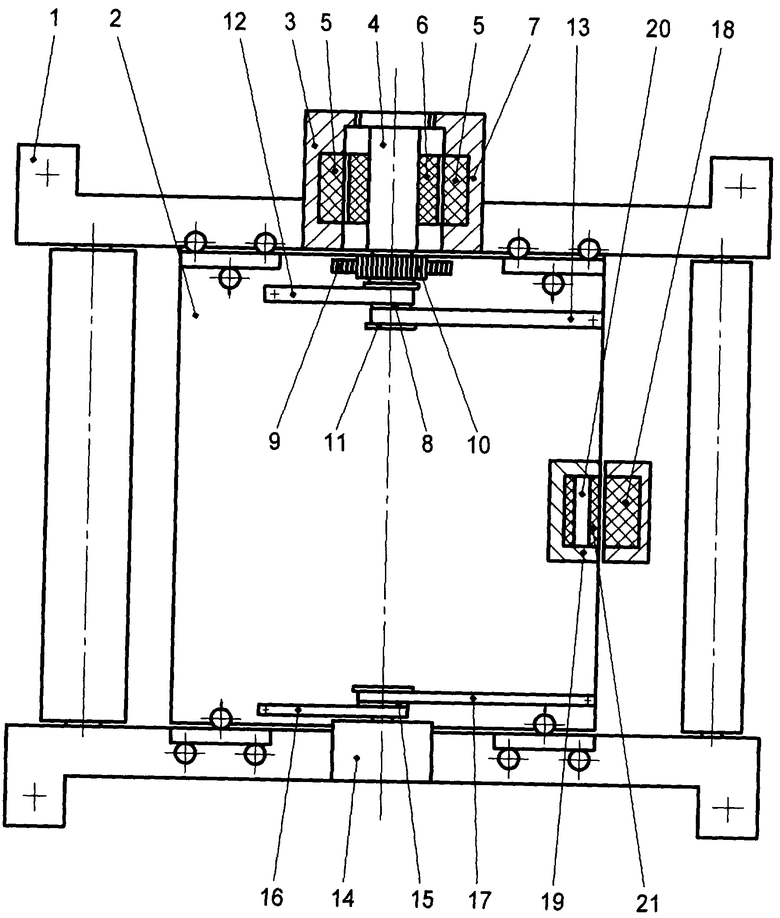
Механизм компенсации сдвига изображения, в корпусе которого содержится выравнивающий стол с приводом для возвратно-поступательного перемещения его в плоскости, перпендикулярной оптической оси аэрофотоаппарата, и приводом, тормозящим его перемещение, отличающийся тем, что привод перемещения и привод торможения объединены в один автономный привод, выполненный в виде моментного двигателя, который жестко закреплен на корпусе механизма компенсации со стороны выравнивающего стола, вдоль которой происходит перемещение, на валу привода моментного двигателя на шкиве одним своим концом закреплены гибкие ленты, другим концом взаимодействующие с выравнивающим столом для его перемещения, дополнительно введена обратная связь в виде потенциометра, также жестко закрепленного на корпусе механизма компенсации сдвига изображения со стороны выравнивающего стола, вдоль которой происходит перемещение, выходной сигнал потенциометра зависит от положения выравнивающего стола относительно корпуса механизма компенсации сдвига изображения и, кроме того, введена магнитная связь, фиксирующая выравнивающий стол, относительно корпуса механизма компенсации сдвига изображения.
| АЭРОФОТОАППАРАТ | 2003 |
|
RU2248026C1 |
| УСТРОЙСТВО для КОМПЕНСАЦИИ ЛИНЕЙНОГО СДВИГА ИЗОБРАЖЕНИЯ | 0 |
|
SU165374A1 |
| US 4505559 A, 19.03.1985 | |||
| US 6366734 A, 02.04.2002 | |||
| US 5974270 A, 26.10.1999. | |||

