Настоящее изобретение относится к транспортной системе, прежде всего к подвесной монорельсовой дороге, состоящей из сети направляющих путей, в которой имеется по меньшей мере один узел, в котором друг к другу примыкают по меньшей мере два путевых участка сети направляющих путей, и имеющей множество тележек, которые передвигаются вдоль направляющих путей в их сети и каждая из которых оснащена управляющим блоком. Изобретение относится также к способу управления тележками такой транспортной системы с направляющими путями.
Подобная транспортная система с направляющими путями известна, например, из заявки DE 19512107 А1.
При наличии в транспортной системе множества тележек, одновременно перемещающихся вдоль направляющих путей в их сети, управление всеми этими тележками центральным управляющим устройством транспортной системы связано с высокими затратами машинного времени на выполняемые в нем вычисления и с обменом большим объемом информации между тележками и этим центральным управляющим устройством.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработать транспортную систему с направляющими путями указанного в начале описания типа, в которой обеспечивалась бы возможность простого и надежного управления перемещениями тележек даже при большом их количестве.
В отношении транспортной системы с направляющими путями с признаками ограничительной части п.1 формулы изобретения указанная задача решается согласно изобретению благодаря тому, что каждой тележке сопоставлена по меньшей мере одна позади идущая тележка или информация об отсутствии за ней позади идущей тележки и/или сопоставлена по меньшей мере одна впереди идущая тележка или информация об отсутствии перед ней впереди идущей тележки, при этом относящаяся к позади идущей тележке, соответственно к впереди идущей тележке информация сохранена в памяти управляющего блока данной тележки и обновляется при прохождении ею узла сети направляющих путей.
Под "позади идущей тележкой" при этом подразумевается другая тележка, которая в направлении движения данной тележки фактически находится позади нее. Позади идущая тележка может находиться и на другом путевом участке по отношению к данной тележке.
Соответственно под "впереди идущей тележкой" подразумевается другая тележка, которая в направлении движения данной тележки фактически находится перед ней. Впереди идущая тележка может находиться и на другом путевом участке по отношению к данной тележке.
Предлагаемое в изобретении решение, согласно которому каждая из тележек в каждый конкретный момент времени располагает информацией об идущей позади нее тележке и идущей впереди нее тележке (или располагает информацией об отсутствии за ней позади идущей, соответственно об отсутствии перед ней впереди идущей тележки, за движением которой она должна следить во избежание столкновения с ней), позволяет значительно сократить объем данных, обмен которыми для управления движением тележек должен происходить между тележками с одной стороны и центральным управляющим устройством транспортной системы с направляющими путями с другой стороны. При этом существует даже возможность управлять движением тележек исключительно за счет обмена данными непосредственно между ними вообще без использования в этих целях центрального управляющего устройства.
Так, в частности, без привлечения центрального управляющего устройства можно регулировать интервал между движущимися одна за другой по одному путевому участку тележками, для чего, например, каждая тележка непрерывно передает информацию о своем фактическом положении в идущую позади нее тележку, которая на основе информации о положении идущей впереди нее тележки и информации о своем собственном положении непрерывно определяет расстояние между собой и впереди идущей тележкой и при необходимости принимает необходимые меры (тормозит или ускоряется) для поддержания заданного расстояния до впереди идущей тележки.
Поскольку в сети направляющих путей транспортной системы имеются также узлы, в которых изменяется взаимосвязь между отдельными тележками как позади и впереди идущими, при прохождении каждой тележкой узла сети направляющих путей содержащаяся в памяти управляющего блока тележки информация, относящаяся к идущей позади нее, соответственно к идущей впереди нее тележке, обновляется.
Подобный узел сети направляющих путей может быть выполнен, например, в виде места разветвления пути, в котором направляющий путь разветвляется на несколько ведущих далее направляющих путей.
Подобный узел сети направляющих путей может быть также выполнен в виде места слияния путей, в котором несколько направляющих путей сливаются в один ведущий далее направляющий путь.
Согласно одному из особо предпочтительных вариантов выполнения предлагаемой в изобретении транспортной системы информация, относящаяся к тележке, идущей позади данной тележки, соответственно к тележке, идущей впереди данной тележки, обновляется за счет обмена данными по меньшей мере с одной другой тележкой транспортной системы.
Альтернативно этому варианту или в дополнение к нему информацию, относящуюся к тележке, идущей позади данной тележки, соответственно к тележке, идущей впереди данной тележки, можно также обновлять за счет обмена данными с расположенным вне тележки узловым координирующим устройством.
Такое узловое координирующее устройство может содержать, в частности, программируемый процессор и соответствующую заложенную в него программу управления данными о находящихся вблизи узла тележках.
В другом варианте узловое координирующее устройство может также содержать несколько выполняемых различными процессорами (вычислительными устройствами) программных модулей управления данными о находящихся вблизи узла тележках. Такие процессоры могут быть также пространственно отделены друг от друга. По меньшей мере один из этих процессоров может является стационарным. Альтернативно этому или в дополнение к этому по меньшей мере один из этих процессоров можно разместить в одной из тележек транспортной системы.
Согласно еще одному предпочтительному варианту выполнения транспортной системы по меньшей мере одно узловое координирующее устройство является стационарным.
Альтернативно этому или в дополнение к этому по меньшей мере одно узловое координирующее устройство можно также расположить в центральном управляющем устройстве транспортной системы.
Для сокращения количества необходимых узловых координирующих устройств по меньшей мере одно узловое координирующее устройство может обслуживать несколько узлов сети направляющих путей.
В другом варианте каждому узлу сети направляющих путей может быть также придано собственное узловое координирующее устройство.
Процесс обновления информации, относящейся к позади идущей тележке, соответственно к впереди идущей тележке, может заключаться, например, в посылке тележкой после прохождения точки начала торможения, привязанной к соответствующему узлу сети направляющих путей, сообщения, по которому инициируется процесс обновления информации, относящейся к тележке, идущей позади данной тележки, и/или к тележке, идущей впереди данной тележки.
Под "точкой начала торможения" при этом имеется в виду точка путевого участка, удаленная от узла, который может представлять собой место слияния путей или место разветвления пути, на некоторое заданное расстояние, которое должно быть достаточным для того, чтобы данную тележку в зависимости от скорости ее движения еще можно было своевременно остановить перед узлом во избежание ее столкновения с другой проходящей через этот узел тележкой.
Сообщение, переданное тележкой при прохождении точки начала торможения, может быть адресовано другой тележке или узловому координирующему устройству транспортной системы.
Помимо этого тележка после прохождения точки начала торможения, привязанной к соответствующему узлу сети направляющих путей, может также посылать сообщение, по которому инициируется процесс обновления информации, относящейся к тележке, идущей позади по меньшей мере одной другой тележки, и/или к тележке, идущей впереди по меньшей мере одной другой тележки.
Особо высокая эксплуатационная надежность транспортной системы обеспечивается в варианте, согласно которому тележка после прохождения точки начала торможения, привязанной к соответствующему узлу сети направляющих путей, посылает сообщение, по которому инициируется процесс обновления информации, относящейся к тележке, идущей позади по меньшей мере одной тележки, и/или к тележке, идущей впереди по меньшей мере одной тележки, и затем получает квитирующее сообщение, которое непосредственно или опосредованно инициировано передачей указанного сообщения. Таким путем тележка, инициировавшая процесс обновления данных, получает подтверждение о том, что ее инициировавшее процесс обновления данных сообщение получено адресатом и что процесс обновления данных успешно завершен.
Квитирующее сообщение может исходить от адресата, инициировавшего процесс обновления данных сообщения, или иного источника, вовлеченного адресатом инициировавшего процесс обновления данных в этот процесс обновления данных.
Согласно еще одному предпочтительному варианту осуществления изобретения предусмотрена далее передача тележкой сообщения, по которому инициируется процесс обновления информации, относящейся к тележке, идущей позади данной тележки, и/или к тележке, идущей впереди данной тележки, после прохождения точки опасности столкновения, привязанной к соответствующему узлу сети направляющих путей.
Под "точкой опасности столкновения" при этом имеется в виду точка путевого участка, которая удалена от соответствующего узла на такое расстояние, что тележка, находящаяся от точки опасности столкновения с ее обращенной от узлового пункта стороны, находится на достаточном удалении от узла, исключающем ее столкновение с другой тележкой, которая проезжает тот же самый узел, двигаясь по другому путевому участку.
Если узел представляет собой место слияния путей, то точка опасности столкновения располагается перед узлом в направлении движения тележек.
Если же узел представляет собой место разветвления пути, то точка опасности столкновения располагается за узлом в направлении движения тележек.
Положение точки опасности столкновения в отличие от положения точки начала торможения обычно определяется вне зависимости от фактической скорости тележки.
При этом инициирующее процесс обновления данных сообщение может быть адресовано другой тележке или узловому координирующему устройству.
Согласно еще одному варианту тележка после прохождения точки опасности столкновения, привязанной к соответствующему узлу сети направляющих путей, может далее посылать сообщение, по которому инициируется процесс обновления информации, относящейся к тележке, идущей позади по меньшей мере одной другой тележки, и/или к тележке, идущей впереди по меньшей мере одной другой тележки.
Дополнительно повысить эксплуатационную надежность предлагаемой в изобретении транспортной системы можно, если согласно еще одному варианту тележка после прохождения точки опасности столкновения, привязанной к соответствующему узлу сети направляющих путей, посылает сообщение, по которому инициируется процесс обновления информации, относящейся к тележке, идущей позади по меньшей мере одной тележки, и/или к тележке, идущей впереди по меньшей мере одной тележки, и затем получает квитирующее сообщение, которое непосредственно или опосредованно инициировано передачей указанного сообщения. Таким путем инициировавшая процесс обновления данных тележка получает подтверждение о том, что ее инициировавшее процесс обновления данных сообщение получено адресатом и что весь процесс обновления данных успешно завершен.
При непоступлении квитирующего сообщения можно предусмотреть принятие соответствующих мер, например экстренную остановку тележки.
Еще одна задача настоящего изобретения состояла в разработке способа управления тележками транспортной системы с направляющими путями указанного в начале описания типа, который обеспечивал бы возможность простого и надежного управления перемещениями тележек даже при большом их количестве.
В отношении способа с признаками ограничительной части п.16 формулы изобретения указанная задача решается согласно изобретению благодаря тому, что каждой тележке сопоставляют по меньшей мере одну позади идущую тележку или информацию об отсутствии за ней позади идущей тележки и/или сопоставляют по меньшей мере одну впереди идущую тележку или информацию об отсутствии перед ней впереди идущей тележки, при этом относящуюся к позади идущей тележке, соответственно к впереди идущей тележке информацию сохраняют в памяти управляющего блока данной тележки и обновляют при прохождении ею узла сети направляющих путей.
В зависимых пп.17-30 формулы изобретения представлены предпочтительные варианты осуществления предлагаемого в изобретении способа, преимущества которых уже рассмотрены выше при описании предпочтительных вариантов выполнения предлагаемой в изобретении транспортной системы.
Другие отличительные особенности и преимущества изобретения более подробно рассмотрены ниже со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схематичный вид в поперечном сечении ходового рельса монорельсовой подвесной дороги со схематичным изображением несущих и направляющих колес, а также устройства для передачи энергии и устройства для передачи данных одной из тележек подвесной монорельсовой дороги,
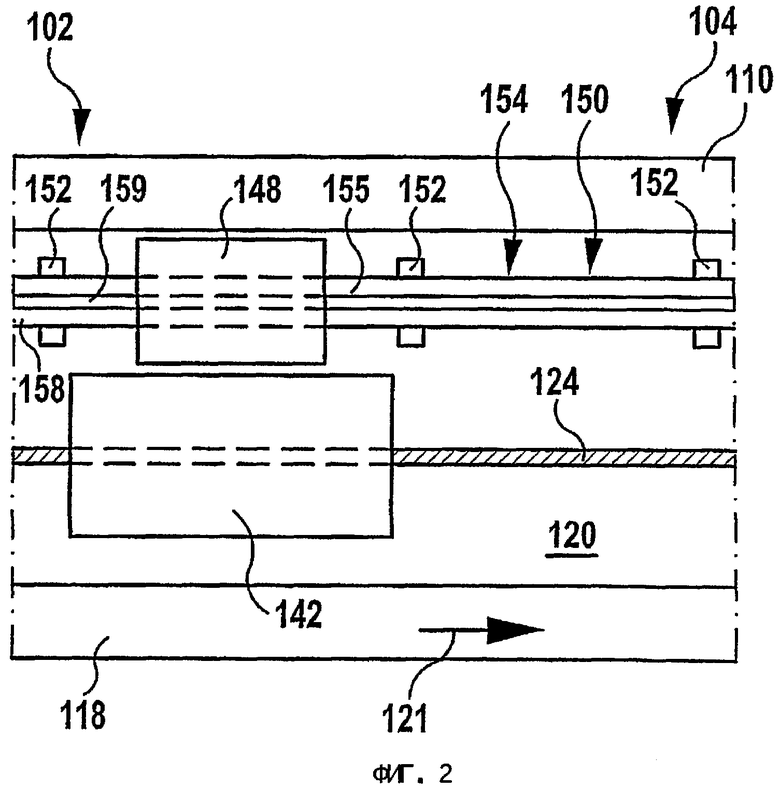
на фиг.2 - схематичный вид сбоку показанного на фиг.1 ходового рельса при наличии движущейся вдоль него тележки подвесной монорельсовой дороги,
на фиг.3-5 - схема, иллюстрирующая обмен данными между тележкой и идущей позади нее тележкой при торможении впереди идущей тележки,
на фиг.6 и 7 - схема, иллюстрирующая обмен данными между тележкой и другими тележками при прохождении тележками места слияния путей,
на фиг.8 и 9 - схема, иллюстрирующая обмен данными между тележкой и другими тележками при прохождении тележками места разветвления пути,
на фиг.10 и 11 - схема, иллюстрирующая процесс обмена данными между тележкой и узловым координирующим устройством при прохождении тележками места слияния путей,
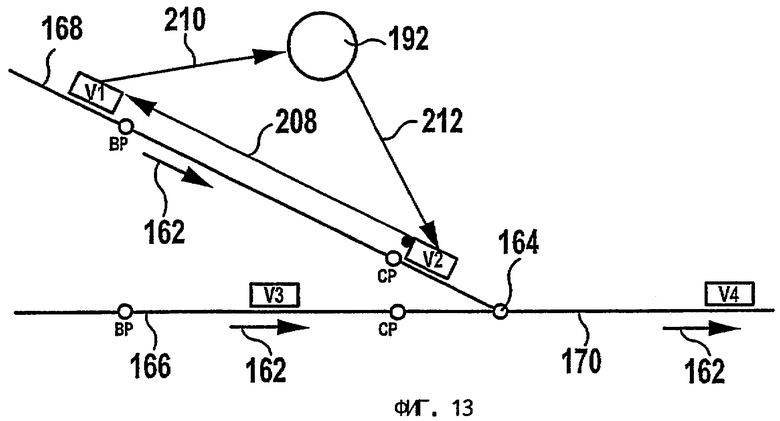
на фиг.12 и 13 - схема, иллюстрирующая обмен данными между тележками и узловым координирующим устройством, а также между самими тележками при прохождении точки начала торможения и точки опасности столкновения, привязанных к соответствующему месту слияния путей,
на фиг.14 и 15 - схема, иллюстрирующая обмен данными между тележками и узловым координирующим устройством, а также между самими тележками при прохождении точки опасности столкновения и точки начала торможения, привязанных к соответствующему месту слияния путей,
на фиг.16 - схема, иллюстрирующая обмен данными между тележками и узловым координирующим устройством, а также между самими тележками в несколько отличающейся от показанной на фиг.15 ситуации,
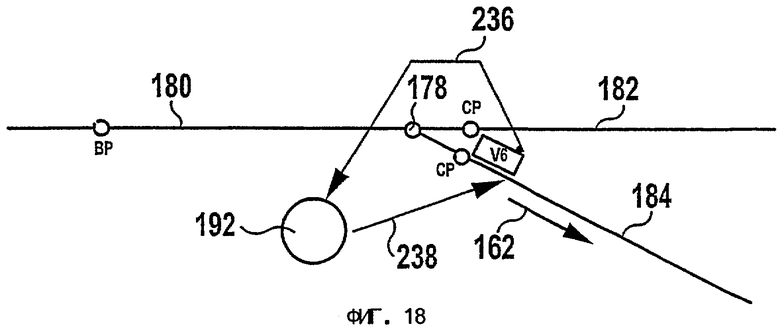
на фиг.17 и 18 - схема, иллюстрирующая обмен данными между тележкой и узловым координирующим устройством при прохождении точки начала торможения и точки опасности столкновения, привязанных к соответствующему месту разветвления пути,
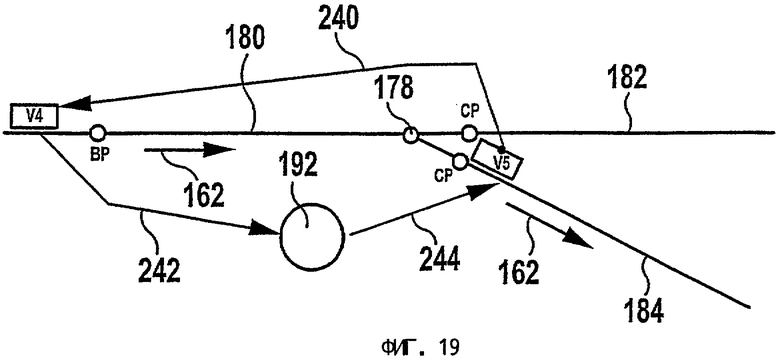
на фиг.19 - схема, иллюстрирующая обмен данными между самими тележками, а также между ними и узловым координирующим устройством при прохождении точки опасности столкновения, привязанной к соответствующему месту разветвления пути, и
на фиг.20-26 - схема, иллюстрирующая обмен данными между тележками и узловым координирующим устройством, а также между самими тележками при прохождении несколькими тележками одна за другой точек начала торможения и точек опасности столкновения, привязанных к соответствующему месту разветвления пути.
На всех чертежах одни и те же или функционально эквивалентные элементы обозначены одинаковыми позициями.
Обозначенная общей позицией 100 и выполненная в рассматриваемом варианте в виде подвесной монорельсовой дороги транспортная система имеет показанный на фиг.1 в поперечном сечении и на фиг.2 в виде сбоку ходовой рельс 102, состоящий из верхней полки 104 с верхней, по существу ровной поверхностью 106 качения и двумя боковыми направляющими поверхностями 108 и 110, а также из нижней полки 112 с ровной нижней поверхностью 114 качения и двумя боковыми направляющими поверхностями 116 и 118.
Обе полки рельса с их обратных поверхностям качения сторон соединены между собой вертикальной шейкой 120 с ровными и проходящими параллельно продольной протяженности 121 ходового рельса стенками.
Между обеими полками 104 и 112 от одной из боковых стенок вертикальной шейки 120 выступает выполненный из электроизоляционного материала (диэлектрика) кронштейн 122 для крепления питающей линии 124 на его дальнем от вертикальной шейки 120 конце.
По верхней поверхности 106 качения ходового рельса 102 катится несущее колесо 126 тележки 128 подвесной монорельсовой дороги 100.
Из числа всех остальных элементов этой тележки 128 на чертежах помимо несущего колеса 126 показаны лишь боковые направляющие колеса 132, 134, 136 и 138, перекатывающиеся по боковым направляющим поверхностям 108, 110, 116 и 118 соответственно, а также устройство 140 для передачи энергии и устройство 146 для передачи данных.
Устройство 140 для передачи энергии содержит, например, токоприемник 142, выполненный в виде П-образного ферритового сердечника с намотанной на него обмоткой 144, которая соединена с электронной схемой токоприемника (не показана), обеспечивающей преобразование индуцируемого в обмотке переменного тока в постоянное напряжение.
Питающая линия 124 проходит внутри ограниченного П-образным токоприемником 142 устройства 140 для передачи энергии пространства, не контактируя с этим токоприемником.
Передача энергии от питающей линии 124 к устройству 140 для передачи энергии происходит за счет индукции. Для этого по питающей линии 124 и по служащему обратным проводником ходовому рельсу 102 пропускается переменный ток повышенной частоты, приводящий к возникновению в токоприемнике 142 соответствующего изменяющегося во времени магнитного потока, в результате чего в обмотке 144 индуцируется переменный ток, который может быть преобразован в тележке 128 в постоянное напряжение, используемое для питания ее привода и систем управления.
Тележка 128 опирается несколькими несущими колесами 126 на ходовой рельс 102, а ее направляющие колеса 132, 134, 136 и 138 направляют ее движение вдоль этого ходового рельса 102, перекатываясь по его боковым направляющим поверхностям.
Помимо этого тележка 128 приводится в движение приводным агрегатом (не показан), который может быть выполнен, например, в виде фрикционного привода.
Устройство 146 для передачи данных, имеющееся в тележке 128, содержит элемент 148 связи в ближней зоне, который закреплен на тележке 128 над устройством 140 для передачи энергии и служит для двухсторонней связи с линией 150 передачи данных, проходящей вдоль ходового рельса 102 и удерживаемой держателями 152 (см. фиг.2) на обращенной к элементу 148 связи в ближней зоне боковой стенке вертикальной шейки 120 ходового рельса 102.
Линия 150 передачи данных выполнена в виде коаксиального кабеля 155 с центральным медным проводом 156 и охватывающей его оболочкой 158, в которой с ее обращенной к установленному на тележке 128 элементу 148 связи в ближней зоне стороны имеется проходящая в продольном направлении коаксиального кабеля 155 осевая прорезь 159, через которую могут проходить передаваемые от коаксиального кабеля 155 или на него высокочастотные колебания.
Коаксиальный кабель 155 с продольной прорезью образует тем самым волновод 154 с утечкой.
В этот волновод 154 с утечкой от (не показанного) стационарного центрального управляющего устройства транспортной системы 100, от стационарных локальных узловых координирующих вычислительных устройств и/или от других тележек вводятся высокочастотные сигналы, которые распространяются вдоль него и принимаются установленным на тележке элементом 148 связи в ближней зоне. Эти высокочастотные сигналы демодулируются находящейся в тележке 128 схемой обработки (не показана) и преобразуются ею в используемые управляющим блоком тележки 128 данные.
И наоборот, формируемые в управляющем блоке тележки 128 данные, которыми схемой модуляции предварительно модулируется высокочастотный несущий сигнал, передаются затем элементом 148 связи в ближней зоне в волновод 154 с утечкой, по которому эти сигналы распространяются к другой тележке или к стационарным (центральным или локальным) управляющим станциям транспортной системы 100.
В (содержащем гибко программируемый или перепрограммируемый процессор и память) управляющем блоке каждой тележки 128 хранится информация о по меньшей мере одной находящейся за ней позади идущей тележкой. Под "позади идущей тележкой" при этом подразумевается другая тележка, которая в направлении движения данной тележки фактически находится позади нее. Позади идущая тележка может находиться и на другом путевом участке по отношению к данной тележке. Если в некоторый момент времени данной тележке 128 не сопоставлена никакая позади идущая тележка, то в ее управляющем блоке сохранена информация об отсутствии за ней позади идущей тележки.
В управляющем блоке каждой тележки 128 хранится далее информация о по меньшей мере одной находящейся перед ней впереди идущей тележке. Под "впереди идущей тележкой" при этом подразумевается другая тележка, которая в направлении движения данной тележки фактически находится перед ней. Впереди идущая тележка может находиться и на другом путевом участке по отношению к данной тележке. Если в некоторый момент данной тележке 128 не сопоставлена никакая впереди идущая тележка, то в ее управляющем блоке сохранена информация об отсутствии за ней впереди идущей тележки.
Наличие в каждой тележке 128 в каждый конкретный момент времени информации о находящейся за ней позади идущей тележке и находящейся перед ней впереди идущей тележке (или информации об отсутствии за ней позади идущей тележки, соответственно об отсутствии перед ней впереди идущей тележки), позволяет управлять движением тележек исключительно за счет обмена информацией непосредственно между ними без необходимости вовлечения в этот процесс центрального управляющего устройства.
Так, в частности, без участия центрального управляющего устройства можно регулировать интервал между движущимися одна за другой на одном путевом участке тележками. Подобный процесс регулирования интервала между движущимися одна за другой тележками более подробно рассмотрен ниже со ссылкой на фиг.3-5.
На фиг.3 в качестве примера изображены три тележки, обозначенные позициями V0, V1 и V2 и движущиеся на одном путевом участке 160 в одном и том же направлении 162.
Тележка V2 является при этом впереди идущей тележкой по отношению к тележке V1, которая в свою очередь является впереди идущей тележкой по отношению к тележке V0. Перед тележкой V2 в данный момент не имеется впереди идущей тележки.
Тележка V0 является позади идущей тележкой по отношению к тележке V1, которая в свою очередь является позади идущей тележкой по отношению к тележке V2. За тележкой V0 в данный момент не имеется позади идущей тележки.
Управляющий блок каждой позади идущей тележки непрерывно рассчитывает расстояние до идущей непосредственно впереди нее тележки. Подобное вычисление может выполняться, например, непосредственно устройством измерения расстояния, которое расположено на тележке (например, на тележке V1) и которое измеряет расстояние до движущейся впереди тележки (например, до тележки V2).
Альтернативно этому или в дополнение к этому можно также предусмотреть возможность непрерывного определения тележкой V1 своего собственного положения в сети направляющих путей, непрерывное получение ею информации от тележки V2 о ее фактическом положении и определение ею расстояния между ней и тележкой V2 путем вычисления разности между их положениями.
Для определения положения тележки в сети направляющих путей транспортной системы 100 можно предусмотреть, например, размещенные вдоль направляющих путей транспортной системы 100 указатели положения, на которые при движении мимо них конкретной тележки срабатывает установленный на ней датчик или детектор. В памяти управляющего блока каждой тележки 128 сохранена информация обо всей сети направляющих путей со всеми имеющимися в ней указателями положения, благодаря чему конкретная тележка при прохождении мимо одного из таких указателей положения может определять свое фактическое положение, которое соответствует положению этого указателя в сети направляющих путей. Промежуточные положения между двумя следующими друг за другом вдоль сети направляющих путей указателями положения управляющий блок тележки может определять интерполяцией с помощью установленной на тележке системы измерения пройденного пути, которая, например, на основе числа совершенных несущим колесом тележки оборотов определяет длину пройденного ею после последнего указателя положения пути.
В показанный на фиг.4 момент тележка V1 определяет, что расстояние от нее до впереди идущей тележки V2 стало слишком малым. В ответ на это тележка V1 снижает скорость своего движения и передает в позади идущую тележку V0 информацию о снижении своей скорости.
Направление передачи такой информации условно обозначено на фиг.4 стрелкой 164.
На основе этого сообщения от впереди идущей тележки V1 информация о торможении этой тележки V1 поступает в позади идущую тележку V0 еще до того момента, как она зафиксирует подобное торможение впереди идущей тележки V1 по результатам измерения расстояния до нее. Тем самым тележка V0 может уже заблаговременно согласовать свою собственную скорость со сниженной скоростью движения впереди идущей тележки V1.
Таким путем можно плавно затормозить все тележки вплоть до показанного на фиг.5 момента, в который тележки V2 и V1 останавливаются соответственно в положениях Р2 и Р1 на достаточном удалении друг от друга.
Поскольку в сети направляющих путей транспортной системы 100 имеются также места слияния путей и разветвления пути, где изменяется взаимосвязь между отдельными тележками как позади, так и впереди идущими, при прохождении тележками каждого из подобных узлов необходимо обновлять хранящуюся в памяти управляющих блоков тележек информацию о соответствующей позади идущей тележке и соответствующей впереди идущей тележке.
Подобное обновление информации о позади и впереди идущих тележках может обеспечиваться, например, за счет непосредственного обмена данными между каждыми тремя тележками.
При этом первая тележка, приближающаяся к месту слияния двух путевых участков, передает сообщение во впереди идущую тележку (во вторую тележку) с запросом на разрешение прохождения этого места слияния путей. За второй тележкой, которая уже находится на ведущем от места слияния путей путевом участке, имеется две позади идущие тележки - по одной на каждом из ведущих к месту слияния путей путевых участков. Если эта впереди идущая тележка получает от одной из идущих позади нее тележек сообщение с запросом на разрешение прохождения этой позади идущей тележкой места слияния путей, то она передает соответственно в другую из идущих позади нее тележек (в третью тележку) сообщение о том, что место слияния путей занято первой позади идущей тележкой, и одновременно удаляет эту вторую позади идущую тележку из своего списка позади идущих тележек.
Третья тележка, получившая от второй тележки сообщение о занятии первой тележкой места слияния путей, сохраняет информацию о первой тележке как о новой идущей впереди нее тележке и передает в первую тележку, инициировавшую процесс обновления данных, квитирующее (подтверждающее) сообщение, из которого следует, что третья тележка с этого момента является тележкой, идущей позади первой тележки.
По получении этого квитирующего сообщения первая тележка сохраняет в памяти информацию о третьей тележке как о дополнительной позади идущей тележке и проходит место слияния путей.
После прохождения места слияния путей первая тележка передает в третью тележку сообщение о том, что место слияния путей вновь свободно.
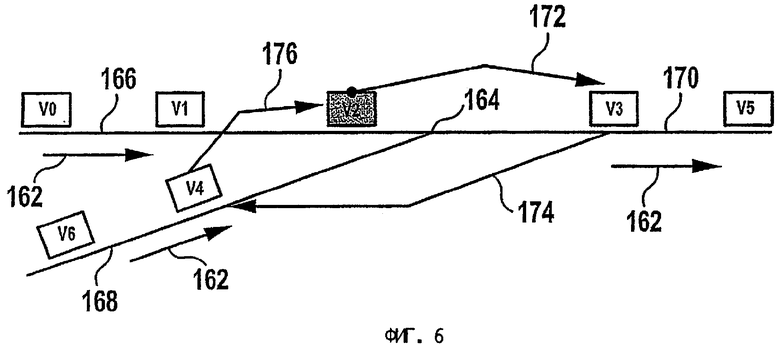
Этот описанный выше процесс обновления данных, происходящий при прохождении тележками места слияния путей, на конкретном примере поясняется ниже со ссылкой на фиг.6 и 7.
Как показано на фиг.6, два ведущих к месту 164 слияния путей путевых участка 166 и 168 сходятся в нем в один, ведущий от места 164 слияния путей путевой участок 170.
Направление движения тележек на каждом из путевых участков указано соответственно стрелкой, обозначенной позицией 162. Тележки V0, V1 и V2 приближаются к месту 164 слияния путей по путевому участку 166. Тележки V3 и V5 удаляются от места 164 слияния путей по путевому участку 170. Тележки V4 и V6 приближаются к месту 164 слияния путей по путевому участку 168.
Тележке V2 сопоставлены тележка V1 в качестве позади идущей тележки и тележка V3 в качестве впереди идущей тележки.
Тележке V3 сопоставлены тележки V2 и V4 в качестве позади идущих тележек и тележка V5 в качестве впереди идущей тележки.
Тележке V4 сопоставлены тележка V6 в качестве позади идущей тележки и тележка V3 в качестве впереди идущей тележки.
В показанный на фиг.6 момент тележка V2, достигнув удаленной на некоторое заданное (в зависимости от скорости ее движения) расстояние от места 164 слияния путей точки (точки начала торможения), инициирует процесс обновления данных, посылая во впереди идущую тележку V3 сообщение (стрелка 172) о том, что она въезжает в зону, в которой находится место 164 слияния путей, и тем самым занимает его.
В ответ на это сообщение тележка V3 передает во вторую из идущих позади нее тележек, т.е. в тележку V4, сообщение (стрелка 174) о том, что место 164 слияния путей занято и что тележка V2 является по отношению к тележке V4 новой идущей впереди нее тележкой. При этом тележка V3 удаляет информацию о тележке V4 из своего списка идущих позади нее тележек.
Тележка V4 заменяет тележку V3 в своем списке идущих впереди нее тележек на новую впереди идущую тележку V2 и передает в тележку V2 квитирующее сообщение (стрелка 176 на фиг.6), из которого тележка V2 получает информацию о том, что процесс обновления данных завершен и что тележка V4 является по отношению к ней новой позади идущей тележкой. В соответствии с этим тележка V2 вносит тележку V4 как еще одну идущую позади нее тележку в свой список идущих позади нее тележек.
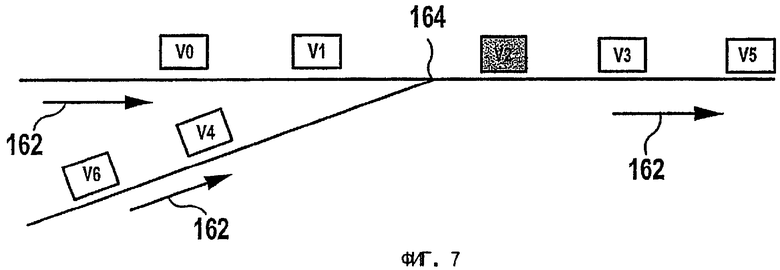
После этого тележка V2 проезжает место 164 слияния путей, а затем вновь освобождает его, в результате чего взаимное расположение тележек изменяется на показанное на фиг.7.
В последующем новый процесс обновления данных может инициироваться либо тележкой V1, либо тележкой V4 в зависимости от того, какая из них первой достигает удаленной от места 164 слияния путей на некоторое заданное расстояние точки, и в соответствии с этим именно эта тележка инициирует описанный выше процесс обновления данных.
Ниже описан процесс обновления данных, инициируемый при приближении тележки к месту разветвления пути в сети направляющих путей транспортной системы 100.
Перед первой тележкой, находящейся на путевом участке, ведущем к месту разветвления пути, имеется две идущие впереди нее тележки, а именно, по одной впереди идущей тележке на каждом путевом участке, отходящем от места разветвления пути.
Первая тележка, приближающаяся к месту разветвления пути, в момент, когда она достигает удаленной от места разветвления пути на некоторое заданное (зависящее от скорости движения тележки) расстояние точки, посылает в ту из идущих впереди нее тележек, которая находится на путевом участке, на который первая тележка не будет въезжать, сообщение, в соответствии с которым первая тележка перестает считаться идущей позади этой второй тележки тележкой, и одновременно сообщает второй тележке информацию о том, какая из тележек является идущей позади первой тележки тележкой.
В ответ на это вторая тележка удаляет первую тележку из своего списка идущих позади нее тележек и вместо нее заносит в этот список в качестве новой идущей позади нее тележки указанную в полученном ею сообщении идущую позади первой тележки тележку.
Далее вторая тележка передает в третью тележку, а именно в бывшую до этого момента идущей позади первой тележки тележкой и ставшую новой идущей позади второй тележки тележкой, сообщение, в соответствии с которым вторая тележка с этого момента является другой идущей впереди третьей тележки тележкой.
После этого третья тележка, движущаяся за первой тележкой на путевом участке, ведущем к месту разветвления пути, заносит в свой список впереди идущих тележек вторую тележку в качестве дополнительной идущей впереди нее тележки.
Далее третья тележка передает в первую тележку квитирующее сообщение, из которого первая тележка получает информацию о завершении процесса обновления данных.
После этого первая тележка проезжает место разветвления пути, и в момент пересечения следующей за ней третьей тележкой, удаленной от места разветвления пути на некоторое заданное расстояние точки, инициируется следующий процесс обновления данных.
Подобный процесс обновления данных более подробно рассмотрен ниже со ссылкой на фиг.8 и 9.
В показанной на фиг.8 ситуации тележки V2, V1 и V0 движутся к месту 178 разветвления пути по ведущему к нему путевому участку 180 в направлении 162, тогда как тележки V3 и V4 движутся от места 178 разветвления пути по первому ведущему от него путевому участку 182, а тележки V5 и V6 движутся от места 178 разветвления пути по второму ведущему от него путевому участку 184.
Тележке V1 сопоставлены тележка V0 в качестве позади идущей тележки и тележка V2 в качестве впереди идущей тележки.
Тележке V2 сопоставлены тележка V1 в качестве позади идущей тележки и тележки V3 и V5 в качестве впереди идущих тележек.
Тележке V3 сопоставлены тележка V2 в качестве позади идущей тележки и тележка V4 в качестве впереди идущей тележки.
Тележке V5 сопоставлены тележка V2 в качестве позади идущей тележки и тележка V6 в качестве впереди идущей тележки.
В показанный на фиг.8 момент тележка V2, достигая удаленной от места 178 разветвления пути на некоторое минимальное (зависящее от скорости ее движения) расстояние точки, инициирует тем самым процесс обновления данных.
Этот процесс обновления данных заключается в том, что тележка V2 сначала передает сообщение (стрелка 186) в тележку V5, в соответствии с которым тележка V2 перестает считаться идущей позади тележки V5 тележкой и одновременно идущая позади тележки V2 тележка становится новой идущей позади тележки V5 тележкой.
После этого тележка V5 в своем списке позади идущих тележек заменяет прежнюю позади идущую тележку V2 на новую позади идущую тележку V1.
Вслед за этим тележка V5 передает в тележку V1 сообщение (стрелка 188), в соответствии с которым тележка V5 указывается как новая, дополнительная идущая впереди тележки V1 тележка.
В ответ на получение этого сообщения тележка V1 заносит тележку V5 в свой список впереди идущих тележек как дополнительную впереди идущую тележку.
Далее тележка V1 передает в тележку V2 квитирующее сообщение (стрелка 190), из которого тележка V2 получает информацию об успешном завершении процесса обновления данных.
Затем тележка V2 проезжает место 178 разветвления пути (см. фиг.9), после чего тележка V1 в момент достижения ею удаленной от места 178 разветвления пути на некоторое минимальное расстояние точки инициирует следующий процесс обновления данных.
В описанных выше процессах управления прохождением тележками мест слияния путей и разветвления пути данные о взаимосвязи между тележками как позади и впереди идущими обновлялись исключительно путем обмена данными между самими тележками при их прохождении каждого из узлов, т.е. мест слияния путей, соответственно мест разветвления пути. Вместо подобного обмена данными непосредственно между тележками либо в дополнение к нему можно также предусмотреть возможность обновления данных о взаимосвязи между тележками как позади и впереди идущими при прохождении ими соответствующего узла с помощью узлового координирующего устройства, обслуживающего один из конкретных узлов.
Подобное узловое координирующее устройство, содержащее программируемый процессор и соответствующую заложенную в него программу управления данными о находящихся вблизи узла тележках, может располагаться вне тележек, прежде всего в стационарном узловом координирующем устройстве на базе компьютера.
Альтернативно этому или в дополнение к этому узловое координирующее устройство может также являться компонентом управляющего блока одной из тележек.
Ниже рассмотрен один из возможных вариантов осуществления процесса обновления данных при прохождении места слияния путей с привлечением обслуживающего его узлового координирующего устройства.
Приближающаяся к месту слияния путей тележка при прохождении так называемой точки начала торможения, которая расположена на некотором заданном, зависящем от скорости тележки расстоянии от места слияния путей, передает в узловое координирующее устройство сообщение, извещающее его о вхождении тележки в зону, в которой находится место слияния путей, обслуживаемое этим узловым координирующим устройством.
Узловое координирующее устройство ведет список тележек, ранее въехавших в зону, в которой находится место слияния путей.
Если этот список пуст, то узловое координирующее устройство передает в приближающуюся к месту слияния путей тележку лишь квитирующее сообщение, а взаимосвязи между этой тележкой и остальными тележками, идущими как впереди, так и позади не, остаются неизменными.
При наличии же в этом списке, который ведет узловое координирующее устройство, хотя бы одной тележки узловое координирующее устройство передает в эту занесенную в список тележку сообщение, в соответствии с которым эта вторая тележка должна занести в свой список указанную первую тележку в качестве так называемой "следующей позади идущей тележки".
Иными словами, в этом варианте осуществления изобретения с каждой тележкой сопоставляются две позади идущие тележки - "фактически позади идущая тележка" и "следующая позади идущая тележка".
Соответственно с каждой тележкой сопоставляются также две впереди идущие тележки - "фактически впереди идущая тележка" и "следующая впереди идущая тележка".
Вторая тележка, таким образом, вносит в свой список первую тележку как "следующую идущую позади нее тележку" и передает в первую тележку квитирующее сообщение, из которого первая тележка получает информацию о том, что с этого момента вторая тележка является для нее "следующей впереди идущей тележкой". Соответственно первая тележка вносит в свой список вторую тележку как "следующую идущую впереди нее тележку".
На этом первый процесс обновления данных, инициированный прохождением первой тележкой точки начала торможения, завершается.
Второй процесс обновления данных инициируется первой тележкой в момент, когда она достигает расположенной перед местом слияния путей так называемой "точки опасности столкновения". Расстояние от точки опасности столкновения до места слияния путей задается (независимо от скорости движения тележек) с таким расчетом, чтобы находящаяся перед точкой опасности столкновения тележка не могла столкнуться с приближающейся по другому путевому участку к тому же самому месту слияния путей тележкой.
Приближающаяся к точке опасности столкновения тележка при отсутствии за ней фактически позади идущей тележки передает в узловое координирующее устройство сообщение, из которого узловое координирующее устройство получает информацию о том, что данная тележка переезжает через место слияния путей на ведущий от него путевой участок.
В ответ на такое сообщение узловое координирующее устройство передает в данную тележку квитирующее сообщение, из которого тележка получает информацию о том, что узловое координирующее устройство зарегистрировало прохождение этой тележкой места слияния путей, и которое содержит адресованную этой тележке команду указать следующую идущую позади нее тележку при ее наличии в качестве фактически идущей позади нее тележки.
При наличии же за тележкой, достигшей точки опасности столкновения, фактически идущей позади нее тележки эта первая тележка передает в эту фактически идущую позади нее тележку, т.е. во вторую тележку, сообщение с адресованной ей командой удалить из своего списка первую тележку как фактически впереди идущую тележку и вместо нее указать "следующую впереди идущую тележку" как "фактически впереди идущую тележку".
Если к этому моменту второй тележке не сопоставлена никакая следующая впереди идущая тележка, то вторая тележка всего лишь удаляет из своего списка фактически впереди идущую тележку.
Далее вторая тележка передает в узловое координирующее устройство сообщение, извещающее его о прохождении первой тележкой места слияния путей.
В ответ на это сообщение узловое координирующее устройство передает в первую тележку квитирующее сообщение, на основе которого первая тележка удаляет из своего списка фактически позади идущую тележку и указывает следующую позади идущую тележку при ее наличии в качестве новой фактически идущей позади нее тележки.
На этом второй процесс обновления данных, инициируемый по достижении точки опасности столкновения, завершается.
Описанный выше подход к управлению тележками при прохождении ими места слияния путей более подробно рассмотрен ниже со ссылкой на фиг.10-16 на конкретных примерах.
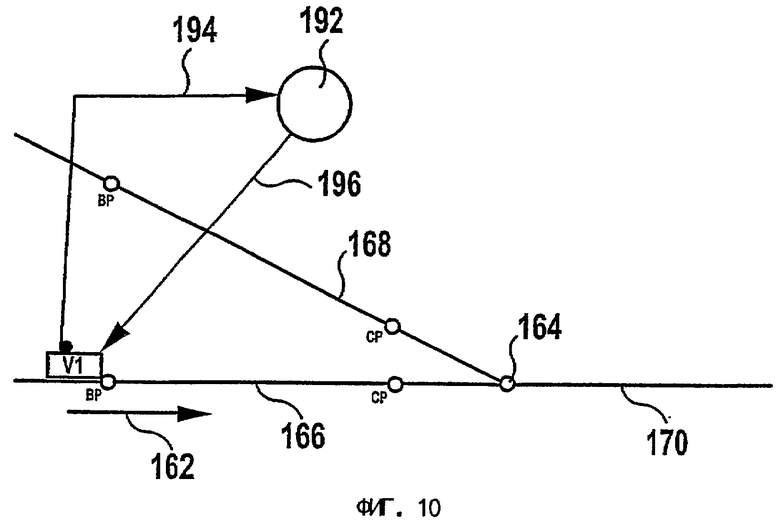
В показанном на фиг.10 примере тележка V1 приближается по путевому участку 166 к месту 164 слияния путей.
Тележке V1 не сопоставлена ни одна фактически идущая позади нее тележка. Список впереди идущих тележек, ведущийся в узловом координирующем устройстве 192, обслуживающем место 164 слияния путей, пуст.
Тележка V1 по достижении точки начала торможения (ВР) передает в узловое координирующее устройство 192 сообщение (стрелка 194), на основе которого узловое координирующее устройство 192 заносит тележку V1 в свой список.
В ответ узловое координирующее устройство 192 передает тележке V1 квитирующее сообщение (стрелка 196).
Далее тележка V1 по достижении точки опасности столкновения (СР) передает в узловое координирующее устройство 192 сообщение (стрелка 198), уведомляющее его о прохождении тележкой V1 места 164 слияния путей (см. фиг.11).
В ответ узловое координирующее устройство 192 передает тележке V1 квитирующее сообщение (стрелка 200).
После этого тележка V1 переезжает с путевого участка 166 через место 164 слияния путей на ведущий от него путевой участок 170. При этом не произошло изменений взаимосвязей между тележкой V1 и другими тележками, идущими как позади, так и впереди нее.
В показанной на фиг.12 ситуации к месту 164 слияния путей по путевому участку 168 приближаются тележки V1 и V2. К этому же месту 164 слияния путей по путевому участку 166 приближается тележка V3. Тележка V4 удаляется по путевому участку 170 от места 164 слияния путей.
Тележке V2 сопоставлена тележка V1 в качестве фактически идущей позади нее тележки. Следующей позади идущей тележки тележка V2 не имеет.
Тележке V3 не сопоставлены ни фактически впереди идущая тележка, ни следующая впереди идущая тележка.
Тележке V1 сопоставлена тележка V2 в качестве фактически идущей впереди нее тележки. Следующей впереди идущей тележки тележка V1 не имеет.
В ведущийся узловым координирующим устройством 192 список впереди идущих тележек занесена тележка V2, которая является последней зарегистрированной в узловом координирующем устройстве 192 тележкой, передавшей в него сообщение о прохождении точки начала торможения на путевом участке 168.
Тележка V3 по достижении точки начала торможения (ВР) на путевом участке 166 передает в узловое координирующее устройство 192 сообщение (стрелка 202) и тем самым регистрируется в нем (фиг.12).
В ответ на это сообщение узловое координирующее устройство 192 передает в тележку V2 сообщение (стрелка 204), на основании которого тележка V3 указывается для тележки V2 как следующая идущая позади нее тележка.
Тележка V2 заносит в свой список тележку V3 как следующую позади идущую тележку и передает в эту тележку V3 квитирующее сообщение (стрелка 206) с адресованной ей командой занести тележку V2 в свой список как следующую впереди идущую тележку.
На этом процесс обновления данных, инициированный прохождением тележкой V3 точки начала торможения, завершается.
В показанный на фиг.13 момент тележка V2 достигает точки опасности столкновения (СР) и поэтому передает в фактически идущую позади нее тележку, т.е. в тележку V1, сообщение (стрелка 208) с адресованной ей командой удалить из своего списка тележку V2 как фактически идущую впереди нее тележку и заменить ее следующей впереди идущей тележкой. Поскольку, однако, тележке V1 не сопоставлена никакая следующая впереди идущая тележка, тележка V1 не заносит в свой список никакой новой фактически впереди идущей тележки.
Далее тележка V1 передает в узловое координирующее устройство 192 сообщение (стрелка 210), извещающее его о том, что с этого момента тележка V2 находится на путевом участке 170.
Узловое координирующее устройство 192 в свою очередь передает квитирующее сообщение в тележку V2 (стрелка 212), которая в ответ на это сообщение удаляет из своего списка тележку V1 как фактически идущую позади нее тележку и вместо нее в качестве фактически идущей позади нее тележки заносит в свой список следующую позади идущую тележку, т.е. тележку V3, одновременно удаляя ее из своего списка как следующую позади идущую тележку.
На этом процесс обновления данных, инициированный по достижении тележкой V2 точки опасности столкновения, завершается.
В показанной на фиг.14 ситуации тележка V1 приближается по путевому участку 168 к месту 164 слияния путей. К этому же месту 164 слияния путей по путевому участку 166 приближаются тележки V3 и V4. Тележка V2 удаляется по путевому участку 170 от места 164 слияния путей.
Тележке V3 сопоставлена тележка V4 в качестве фактически идущей позади нее тележки. Следующей позади идущей тележки тележка V3 не имеет. Тележка V2 сопоставлена тележке V3 в качестве фактически впереди идущей тележки. Следующей впереди идущей тележки тележка V3 не имеет.
Тележке V4 сопоставлена тележка V3 в качестве фактически идущей впереди нее тележки. Следующей впереди идущей тележки тележка V4 не имеет.
В показанной на фиг.14 ситуации тележка V3 по достижении точки опасности столкновения на путевом участке 166 передает в тележку V4, т.е. в фактически идущую позади нее тележку, сообщение (стрелка 214) с адресованной ей командой удалить из своего списка тележку V3 как фактически идущую впереди нее тележку. Поскольку тележка V4 не имеет следующей впереди идущей тележки, она не заносит в свой список никакой новой фактически впереди идущей тележки.
Тележка V4 передает в узловое координирующее устройство 192 сообщение (стрелка 216), уведомляющее его о том, что в этот момент тележка V3 проходит место 164 слияния путей.
Узловое координирующее устройство 192 в свою очередь передает в тележку V3 квитирующее сообщение (стрелка 218) с адресованной ей командой удалить из своего списка тележку V4 как фактически идущую позади нее тележку. Поскольку тележка V3 не имеет следующей позади идущей тележки, она не заносит в свой список никакой новой фактически позади идущей тележки.
Через короткий промежуток времени тележка V4 в показанный на фиг.15 момент достигает точки начала торможения (ВР) и по достижении этой точки передает в узловое координирующее устройство 192 сообщение (стрелка 220), которым тележка V4 уведомляет узловое координирующее устройство о своем приближении к месту 164 слияния путей.
В ведущемся узловым координирующим устройством 192 списке впереди идущих тележек зарегистрирована тележка V3.
Поэтому узловое координирующее устройство 192 передает в тележку V3 сообщение (стрелка 222), уведомляющее ее о том, что тележка V4 является для нее новой следующей позади идущей тележкой.
Тележка V3 заносит в свой список тележку V4 как новую следующую позади идущую тележку и передает об этом квитирующее сообщение (стрелка 224) в тележку V4, которая в ответ на него заносит в свой список тележку V3 как следующую впереди идущую тележку.
На этом процесс обновления данных, инициированный по достижении тележкой V4 точки начала торможения, завершается.
В показанном на фиг.16 варианте, который является разновидностью показанной на фиг.15 ситуации, тележка V4 достигает точки начала торможения до момента достижения тележкой V3 точки опасности столкновения.
Поэтому в показанной на фиг.16 ситуации тележка V3 зарегистрирована как фактически идущая впереди тележки V4 тележка, а тележка V4 в свою очередь зарегистрирована как фактически идущая позади тележки V3 тележка.
По достижении точки начала торможения тележка V4 передает в узловое координирующее устройство 192 сообщение (стрелка 226), которым тележка V4 уведомляет узловое координирующее устройство о своем приближении к месту 164 слияния путей.
В ведущемся узловым координирующим устройством 192 списке впереди идущих тележек зарегистрирована тележка V3, в связи с чем узловое координирующее устройство 192 передает в тележку V3 сообщение (стрелка 228) с адресованной ей командой указать тележку V4 как новую следующую позади идущую тележку.
Тележка V3 заносит в свой список тележку V4 как следующую позади идущую тележку и передает в тележку V4 квитирующее сообщение (стрелка 230) с адресованной ей командой указать в своем списке тележку V3 как новую следующую впереди идущую тележку.
На этом процесс обновления данных, инициированный по достижении тележкой V4 точки начала торможения, завершается.
Процессы обновления данных, происходящие с участием узлового координирующего устройства при прохождении тележками места разветвления пути в сети направляющих путей транспортной системы 100, соответствуют процессам обновления данных, происходящим при прохождении тележками места слияния путей, с тем лишь отличием, что точки опасности столкновения (СР) при прохождении места разветвления пути находятся в направлении движения тележек не перед, а за узлом, т.е. за местом разветвления пути, а узловое координирующее устройство ведет для каждого из ведущих от места разветвления пути путевых участков их собственный список впереди идущих тележек и тележки, когда они регистрируются в узловом координирующем устройстве 192, уведомляя его о приближении к месту 178 разветвления пути, одновременно сообщают ему, на какой из отходящих от места 178 разветвления пути путевых участков они собираются перейти.
Таким образом, тележка по достижении точки начала торможения перед местом разветвления пути посылает в обслуживающее это место разветвления пути узловое координирующее устройство сообщение, уведомляя его о своем приближении к месту разветвления пути и о дальнейшем переходе на один из отходящих от него путевых участков.
Если в ведущемся узловым координирующим устройством списке впереди идущих тележек для соответствующего путевого участка не указана ни одна впереди идущая тележка, то узловое координирующее устройство передает в данную тележку квитирующее сообщение с информацией об этом.
Если же в ведущемся узловым координирующим устройством списке впереди идущих тележек имеется информация о тележке, которая находится на том же путевом участке, на который собирается переехать и приближающаяся к месту разветвления пути тележка, то узловое координирующее устройство передает в эту вторую тележку сообщение с адресованной ей командой занести в свой список первую тележку как следующую позади идущую тележку и одновременно передать первой тележке квитирующее сообщение с адресованной ей командой занести в свой список вторую тележку как следующую впереди идущую тележку.
При отсутствии за второй тележкой фактически идущей позади нее тележки первая тележка заносится в список как фактически идущая позади второй тележки тележка и одновременно удаляется из него как следующая идущая позади второй тележки тележка.
При отсутствии перед первой тележкой фактически идущей впереди нее тележки вторая тележка заносится в список как фактически идущая впереди первой тележки тележка и одновременно удаляется из него как следующая идущая впереди первой тележки тележка.
На этом процесс обновления данных, инициированный по достижении первой тележкой точки начала торможения, завершается.
По достижении тележкой, прошедшей место разветвления пути, точки опасности столкновения (СР) на новом путевом участке, ведущем от разветвления пути, эта первая тележка передает в фактически идущую позади нее тележку сообщение с адресованной ей командой удалить из своего списка первую тележку как фактически идущую впереди нее тележку при ее наличии и указать следующую впереди идущую тележку как фактически впереди идущую тележку.
Далее вторая тележка передает в узловое координирующее устройство сообщение, уведомляющее его о том, что первая тележка прошла место разветвления пути.
В ответ на это сообщение узловое координирующее устройство передает в первую тележку квитирующее сообщение с адресованной ей командой удалить из своего списка вторую тележку как фактически идущую позади нее тележку и указать следующую позади идущую тележку при ее наличии как фактически позади идущую тележку.
На этом процесс обновления данных, инициированный по достижении первой тележкой точки опасности столкновения, завершается.
Достигшая точки опасности столкновения тележка при отсутствии сопоставленной ей фактически идущей позади нее тележки передает в узловое координирующее устройство сообщение, уведомляющее его о том, что она прошла место разветвления пути.
Узловое координирующее устройство в свою очередь передает в эту тележку квитирующее сообщение с адресованной ей командой указать в своем списке следующую позади идущую тележку при ее наличии как фактически позади идущую тележку.
На этом процесс обновления данных, инициированный по достижении тележкой точки опасности столкновения, завершается.
Процессы обновления данных, происходящие при прохождении тележками места 178 разветвления пути, более подробно рассмотрены ниже со ссылкой на фиг.17-26.
В показанной на фиг.17 ситуации тележка V6 приближается по путевому участку 180 к месту 178 разветвления пути, а тележка V7, наоборот, удаляется по путевому участку 182 от места 178 разветвления пути.
В показанный на фиг.17 момент тележка V6 по достижении точки начала торможения (ВР) на путевом участке 180 передает в обслуживающее место 178 разветвления пути узловое координирующее устройство 192 сообщение (стрелка 232), уведомляя его о своем приближении к месту 178 разветвления пути и о дальнейшем переходе на путевой участок 184.
Поскольку в этот момент тележка V7 находится на другом путевом участке 182 и поэтому ведущийся узловым координирующим устройством 192 список впереди идущих тележек для путевого участка 184 пуст, узловое координирующее устройство 192 передает непосредственно в тележку V6 квитирующее сообщение (стрелка 234) о том, что выбранный путевой участок свободен.
В показанный на фиг.18 момент тележка V6, пройдя место 178 разветвления пути и переехав на путевой участок 184, уже прошла находящуюся на нем точку опасности столкновения (СР).
В этот момент тележка V6, поскольку за ней не имеется фактически идущей позади нее тележки, передает в узловое координирующее устройство 192 сообщение (стрелка 236), уведомляющее его о том, что она покинула зону, в которой находится место 178 разветвления пути.
В ответ узловое координирующее устройство 192 передает в тележку V6 квитирующее сообщение (стрелка 238) с адресованной ей командой указать в своем списке следующую позади идущую тележку при ее наличии как фактически позади идущую тележку.
На этом процесс обновления данных, инициированный прохождением тележкой V6 точки опасности столкновения, завершается.
В показанной на фиг.19 ситуации тележка V4 приближается по путевому участку 180 к месту 178 разветвления пути, а тележка V5, наоборот, удаляется по путевому участку 184 от места 178 разветвления пути.
Тележке V4 сопоставлена тележка V5 в качестве фактически идущей впереди нее тележки. Тележка V4 в свою очередь сопоставлена тележке V5 в качестве фактически идущей позади нее тележки.
В показанный на фиг.19 момент тележка V5, пройдя точку опасности столкновения (СР) на путевом участке 184, передает в фактически идущую позади нее тележку, т.е. в тележку V4, сообщение (стрелка 240) с адресованной ей командой удалить из своего списка тележку V5 как фактически идущую впереди нее тележку и указать следующую впереди идущую тележку как фактически впереди идущую тележку. Поскольку, однако, тележке V4 не сопоставлена ни одна следующая идущая впереди нее тележка, она не заносит в свой список никакой новой фактически впереди идущей тележки.
Тележка V4 передает в узловое координирующее устройство 192 сообщение (стрелка 242), уведомляющее его о том, что она покинула зону, в которой находится место 178 разветвления пути.
Узловое координирующее устройство 192 в свою очередь передает в тележку V5 квитирующее сообщение (стрелка 244) с адресованной ей командой удалить из своего списка тележку V4 как фактически идущую позади нее тележку и указать следующую позади идущую тележку при ее наличии как фактически позади идущую тележку. Поскольку, однако, тележке V5 не сопоставлена ни одна следующая идущая позади нее тележка, она не заносит в свой список никакой новой фактически позади идущей тележки.
На этом процесс обновления данных, инициированный прохождением тележкой V5 точки опасности столкновения, завершается.
В показанной на фиг.20 ситуации тележка V2 приближается по путевому участку 180 к месту 178 разветвления пути, тогда как тележки V4 и V3 удаляются от места 178 разветвления пути по путевым участкам 182 и 184 соответственно.
Тележке V2 сопоставлена тележка V3 в качестве фактически идущей впереди нее тележки, но не сопоставлено ни одной следующей впереди идущей тележки. Помимо этого тележке V2 сопоставлена тележка V1 (которая еще не видна в показанный на фиг.20 момент) в качестве фактически идущей позади нее тележки, но не сопоставлено ни одной следующей позади идущей тележки.
Тележке V3 сопоставлена тележка V2 в качестве фактически идущей позади нее тележки, но не сопоставлено ни одной следующей позади идущей тележки.
Тележке V4 не сопоставлены ни фактически идущая позади нее тележка, ни следующая позади идущая тележка.
В показанный на фиг.20 момент тележка V2, достигнув точки начала торможения на путевом участке 180, передает в узловое координирующее устройство 192 сообщение (стрелка 246), которым она уведомляет его о приближении к месту 178 разветвления пути и о дальнейшем переходе на путевой участок 182.
Поскольку в ведущемся узловым координирующим устройством 192 списке впереди идущих тележек, находящихся на путевом участке 182, указана тележка V4, узловое координирующее устройство 192 передает в эту тележку V4 сообщение (стрелка 248) с адресованной ей командой занести в свой список тележку V2 как следующую позади идущую тележку.
Поскольку за тележкой V4 нет фактически идущей позади нее тележки, тележка V2 заносится в список как фактически идущая позади тележки V4 тележка и одновременно удаляется из него как следующая идущая позади тележки V4 тележка.
Тележка V4 передает в тележку V2 квитирующее сообщение (стрелка 250) с адресованной ей командой занести в свой список тележку V4 как следующую идущую впереди нее тележку.
На этом процесс обновления данных, инициированный по достижении тележкой V2 точки начала торможения, завершается.
В показанный на фиг.21 момент следующая за тележкой V2 по путевому участку 180 тележка V1 достигла находящейся на этом путевом участке 180 точки начала торможения.
Тележке V1 сопоставлена тележка V2 в качестве фактически идущей впереди нее тележки.
По достижении точки начала торможения тележка V1 передает в узловое координирующее устройство 192 сообщение (стрелка 252), которым она уведомляет его о приближении к месту 178 разветвления пути и о дальнейшем переходе на путевой участок 184.
Поскольку в ведущемся узловым координирующим устройством 192 списке впереди идущих тележек, находящихся на путевом участке 184, указана тележка V3, узловое координирующее устройство 192 передает в тележку V3 сообщение (стрелка 254) с адресованной ей командой занести в свой список тележку V1 как следующую идущую позади нее тележку.
Далее тележка V3 передает в тележку V1 квитирующее сообщение (стрелка 256) с адресованной ей командой занести в свой список тележку V3 как следующую идущую впереди нее тележку.
На этом процесс обновления данных, инициированный по достижении тележкой V1 точки начала торможения, завершается.
В показанный на фиг.22 момент тележка V3 прошла точку опасности столкновения (СР) на путевом участке 184 и поэтому передает в фактически идущую позади нее тележку, т.е. в тележку V2, сообщение (стрелка 258) с адресованной ей командой удалить из своего списка тележку V3 как фактически идущую впереди нее тележку и занести в него следующую впереди идущую тележку, т.е. тележку V4, в качестве новой фактически идущей впереди нее тележки, одновременно удалив из списка тележку V4 как следующую идущую впереди тележки V2 тележку.
Далее тележка V2 передает в узловое координирующее устройство 192 сообщение (стрелка 260), уведомляющее его о том, что тележка V3 покинула зону, в которой находится место разветвления пути.
В ответ на это сообщение узловое координирующее устройство 192 передает в тележку V3 квитирующее сообщение (стрелка 262) с адресованной ей командой удалить из своего списка тележку V2 как фактически идущую позади нее тележку и указать в нем следующую позади идущую тележку, т.е. тележку V1, как новую фактически идущую позади нее тележку, одновременно удалив тележку V1 из списка как следующую позади идущую тележку.
На этом процесс обновления данных, инициированный прохождением тележкой V3 точки опасности столкновения, завершается.
В показанный на фиг.23 момент еще одна, следующая на путевом участке 180 за тележкой V1 тележка V0 достигает находящейся на этом путевом участке 180 точки начала торможения.
Тележке V0 сопоставлена тележка V1 в качестве фактически идущей впереди нее тележки.
По достижении точки начала торможения тележка V0 передает в узловое координирующее устройство 192 сообщение (стрелка 264), которым она уведомляет его о приближении к месту 178 разветвления пути и о дальнейшем переходе на путевой участок 182.
Поскольку в ведущемся узловым координирующим устройством 192 списке впереди идущих тележек, находящихся на путевом участке 182, указана тележка V2, узловое координирующее устройство 192 передает в тележку V2 сообщение (стрелка 266) с адресованной ей командой занести в свой список тележку V0 как следующую идущую позади нее тележку.
Далее тележка V2 передает в тележку V0 квитирующее сообщение (стрелка 268) с адресованной ей командой занести в свой список тележку V2 как следующую идущую впереди нее тележку.
На этом процесс обновления данных, инициированный по достижении тележкой V0 точки начала торможения, завершается.
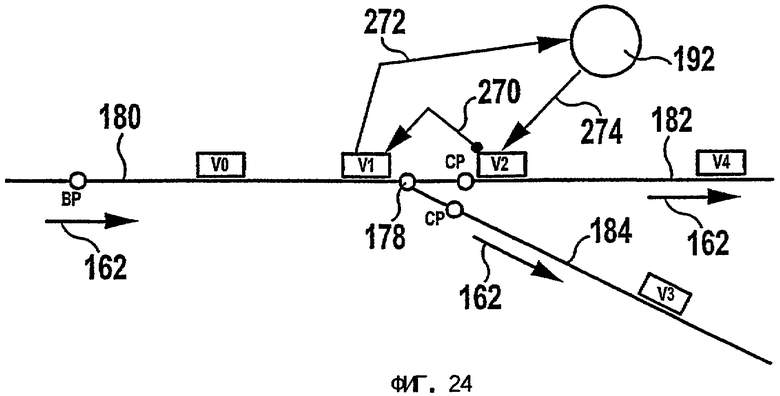
В показанный на фиг.24 момент тележка V2 уже перешла за точку опасности столкновения (СР) на путевом участке 182.
Поэтому тележка V2 передает в фактически идущую позади нее тележку, т.е. в тележку V1, сообщение (стрелка 270) с адресованной ей командой удалить из своего списка тележку V2 как фактически идущую впереди нее тележку и указать в нем следующую впереди идущую тележку, т.е. тележку V3, как новую фактически идущую впереди нее тележку, одновременно удалив из списка тележку V3 как следующую идущую впереди тележки V1 тележку.
Далее тележка V1 передает в узловое координирующее устройство 192 сообщение (стрелка 272), уведомляющее его о том, что тележка V2 покинула зону, в которой находится место разветвления пути.
В ответ на это сообщение узловое координирующее устройство 192 передает в тележку V2 квитирующее сообщение (стрелка 274) с адресованной ей командой удалить из своего списка тележку V1 как фактически идущую позади нее тележку и вместо нее указать в нем следующую позади идущую тележку, т.е. тележку V0, как новую фактически идущую позади нее тележку, одновременно удалив тележку V0 из списка как следующую идущую позади тележки V2 тележку.
На этом процесс обновления данных, инициированный переходом тележкой V2 точки опасности столкновения, завершается.
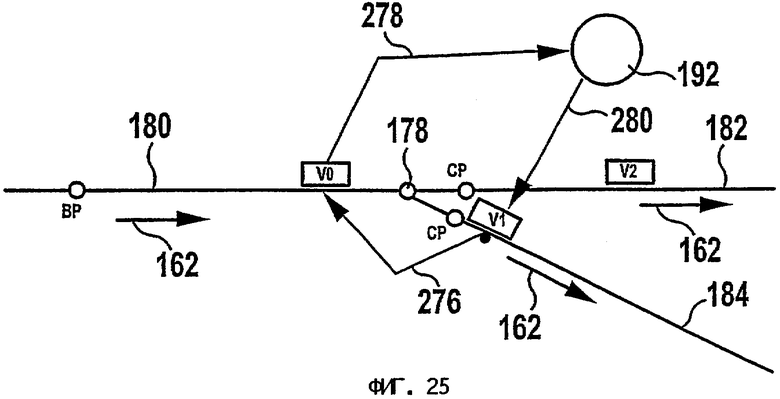
В показанный на фиг.25 момент тележка V1 уже прошла точку опасности столкновения (СР) на путевом участке 184.
Поэтому тележка V1 передает в фактически идущую позади нее тележку, т.е. в тележку V0, сообщение (стрелка 276) с адресованной ей командой удалить из своего списка тележку V1 как фактически идущую впереди нее тележку и вместо нее указать в нем следующую впереди идущую тележку, т.е. тележку V2, как новую фактически идущую впереди нее тележку, одновременно удалив из списка тележку V2 как следующую идущую впереди тележки V0 тележку.
Далее тележка V0 передает в узловое координирующее устройство 192 сообщение (стрелка 278), уведомляющее его о том, что тележка V1 покинула зону, в которой находится место разветвления пути.
В ответ на это сообщение узловое координирующее устройство 192 передает в тележку V1 квитирующее сообщение (стрелка 280) с адресованной ей командой удалить из своего списка тележку V0 как фактически идущую позади нее тележку и указать в нем следующую позади идущую тележку как новую фактически идущую позади нее тележку. Поскольку, однако, тележке V1 не сопоставлена ни одна следующая идущая позади нее тележка, она не заносит в свой список никакой новой фактически позади идущей тележки.
На этом процесс обновления данных, инициированный переходом тележкой V1 за точку опасности столкновения, завершается.
В показанный на фиг.26 момент тележка V0 уже прошла точку опасности столкновения (СР) на путевом участке 182.
Тележке V0 не сопоставлена никакая фактически идущая позади нее тележка, и поэтому она передает непосредственно в узловое координирующее устройство 192 сообщение (стрелка 282), уведомляющее его о том, что она покинула зону, в которой находится место разветвления пути.
В ответ на это сообщение узловое координирующее устройство 192 передает в тележку V0 квитирующее сообщение (стрелка 284) с адресованной ей командой удалить из своего списка фактически идущую позади нее тележку и указать в нем следующую позади идущую тележку как новую фактически идущую позади нее тележку, одновременно удалив из списка эту следующую позади идущую тележку.
Поскольку, однако, тележке V0 не сопоставлена ни фактически идущая позади нее тележка, ни следующая позади идущая тележка, список, определяющий взаимосвязи тележки V0 с идущими позади нее тележками, остается неизмененным.
На этом процесс обновления данных, инициированный переходом тележкой V0 за точку опасности столкновения, завершается.
Места 164 слияния путей и места 178 разветвления пути в сети направляющих путей транспортной системы 100 реализованы в виде так называемых "активных стрелок", под которой подразумевается стрелка с подвижными рельсовыми участками в отличие от "пассивной стрелки", у которой все ее рельсовые участки являются неподвижными, а перевод тележки с одного рельсового пути на другой осуществляется переключением имеющегося у нее направляющего устройства. Активная стрелка для подвесной монорельсовой дороги известна, например, из DE 3302266 С2.
















Изобретение относится к транспортной системе, прежде всего к подвесной монорельсовой дороге. Транспортная система состоит из сети направляющих путей, в которой имеется по меньшей мере один узел, в котором друг к другу примыкают по меньшей мере два путевых участка сети направляющих путей, и имеет множество тележек, которые передвигаются вдоль направляющих путей в их сети и каждая из которых оснащена управляющим блоком. Каждой тележке сопоставлена по меньшей мере одна позади идущая тележка или информация об отсутствии за ней позади идущей тележки и/или сопоставлена по меньшей мере одна впереди идущая тележка или информация об отсутствии перед ней впереди идущей тележки, при этом относящаяся к позади идущей тележке, соответственно к впереди идущей тележке информация сохранена в памяти управляющего блока данной тележки и обновляется управляющим блоком каждой тележки при каждом прохождении данной тележкой узла сети направляющих путей. Изобретение обеспечивает возможность надежного управления перемещениями тележек даже при большом их количестве. 2 н. и 28 з.п. ф-лы, 26 ил.
| DE 19512107 А1, 24.10.1996 | |||
| WO 9609199 А1, 28.03.1996 | |||
| DE 19828878 А, 30.12.1999 | |||
| WO 9405536 А1, 17.03.1994 | |||
| RU 97110229 А, 10.07.1999 | |||
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ, НАПРИМЕР ПОДВИЖНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1996 |
|
RU2115140C1 |

