Группа изобретений относится к автономным цифровым интегрированным комплексам бортового электронного оборудования многодвигательных воздушных судов (ЦИКБО МВС), в частности, к бортовым интегрированным системам информационной поддержки экипажа многодвигательного воздушного судна (БИСИП МВС), которые предназначены для предупреждения авиационных происшествий и серьезных инцидентов (АПиСИ) на этапе «ВЗЛЕТ», и к системам визуальной поддержки когнитивной деятельности экипажа за счет создания новых форматов отображения полетной информации (пилотажной, навигационной, параметров силовых установок и систем МВС, параметров окружающей среды закабинного пространства).
БИСИП МВС является электронной измерительно-вычислительной системой с расширенными функциональными возможностями по оказанию экипажу информационной поддержки на этапах предполетной, предстартовой подготовки, режимах перемещения по рабочей площади аэродрома, руления, разбега по взлетно-посадочной полосе (ВПП) и на воздушном участке полной взлетной дистанции за счет значительного повышения уровня ситуационной (информационной) осведомленности и служит для обеспечения экипажа полной, достоверной, актуальной, непротиворечивой и интерактивной информацией и представления на внутрикабинных индикаторах только значимых параметров, критичных для принятия решения по управлению МВС на этапе взлета.
БИСИП МВС содержит автономный улучшенный бортовой интегрированный комплекс визуализации параметров полета (БИКВПП), улучшенный автономный бортовой интегрированный комплекс визуализации параметров подстилающей поверхности окружающей среды закабинного пространства (БИКВЗКП), функционирующий в реальном режиме времени независимо от фактических метеорологических условий окружающей среды в любое время года и суток и независимо от технических характеристик подстилающей поверхности окружающей среды, систему раннего предупреждения столкновения с подстилающей поверхностью и искусственными препятствиями на ней на воздушном участке взлетной дистанции с реализацией алгоритма «впередсмотрящего», систему раннего предупреждения столкновения с подвижными и неподвижными препятствиями и об опасной скорости сближения с ними при перемещении МВС по рабочей площади аэродрома.
БИСИП МВС дополнительно имеет систему предупреждения «хвостовых ударов» МВС в процессе разбега по ВПП, улучшенную систему предупреждения сваливания на воздушном участке взлетной дистанции, систему мониторинга процесса разбега по ВПП с прогнозирующими и реальными измерительно-вычислительными каналами определения параметров динамики разбега, систему предупреждения взлета с конфигурацией механизации крыла и стабилизатора не соответствующей требованиям руководства по летной эксплуатации (РЛЭ), систему мониторинга торможения (стояночного, основного и аварийного) и предотвращения взлета на стояночном тормозе и подторможенных пневматиках, улучшенную систему контроля взлетно-посадочных устройств (ВПУ): положения шасси и передней стойки шасси относительно линий разметок мест стоянок (МС), рулежных дорожек (РД), ВПП, контроля технического состояния пневматиков шасси - количества и целостности, систему предупреждения взлета с застопоренными рулями и элеронами и улучшенную систему предупреждения ошибок экипажа по управлению реверсами тяги двигателей. БИСИП МВС также содержит аппаратно-программные средства информационной поддержки экипажа по принятию правильных управленческих решений в быстроменяющейся аэродинамической обстановке, направленные на предотвращение АПиСИ из-за отказов авиационной техники, неблагоприятного влияния внешних факторов, минимизации ошибочных действий и предотвращения бездействия экипажа, аппаратно-программный комплекс улучшенной визуализации рельефа подстилающей поверхности, реализованный на базе виртуального отображения подстилающей поверхности, улучшенную бортовую интегрированную систему аварийно-предупреждающей сигнализации (БСАС), предназначенную для интеллектуальной поддержки когнитивной деятельности экипажа. БИСИП МВС также имеет бортовую оперативно-советующую экспертную систему информационной поддержки экипажа, предназначенную для предотвращения авиационных происшествий при возникновении нештатных ситуаций и особых случаев.
Вопросы обеспечения безопасности полетов МВС, управляемого двумя пилотами, и недопущения перехода усложненных условий полета или аварийной полетной ситуации в катастрофическую в значительной мере зависят от своевременности и правильности принятия решения экипажем по управлению ВС, а также темпа выполнения операций, предписанного технологией работы экипажа в соответствии с требованием РЛЭ. Это связано с тем, что экипажу из двух пилотов кроме прямых обязанностей по штурвальному управлению ВС приходится выполнять обязанности других членов экипажа: штурмана, бортового инженера, бортового радиста, хотя решение этих задач обычно максимально автоматизировано. Однако, экипажу все равно приходится отвлекаться от пилотирования для решения задач навигации, ведения радиосвязи и на управление многочисленными системами ВС и его силовых установок. В заявляемом устройстве с целью повышения уровня интеллектуальной поддержки экипажа используется активация визуального (образного) мышления, позволяющая разгрузить ментальную деятельность экипажа. Разрабатываемые новые форматы отображения информации с динамической индикацией множества одновременно изменяющихся параметров полета позволяют экипажу предвидеть дальнейшие изменения параметров - будущее перемещение воздушного судна и его реакцию на управляющие воздействия экипажа. Новый формат (визуальный вид отображения, симвология) информационного обеспечения экипажа на этапе «ВЗЛЕТ», разработанный с применением принципов искусственного интеллекта и когнитивности, направлен на повышение общего уровня ситуационной информированности экипажа с учетом полноты, достоверности, актуальности по этапам полета, интерактивности, пропускной способности человеческого организма по обработке информации без необходимости выполнения расчетов, обращения к долговременной памяти, а в условиях быстроменяющейся обстановки и к оперативной памяти, без необходимости распознавания и раскодирования информации и исключает нецелесообразные операции по штурвальному управлению, снижает ошибочные действия экипажа, а также уровень неопределенности при принятии решений по управлению МВС.
Предпосылки создания изобретений
Известно, что при летной эксплуатации МВС на этапе взлет у экипажа возникают проблемы по обеспечению его безопасности.
С целью выявления основных причин возникновения авиационных происшествий и серьезных инцидентов (АПиСИ) авторами был проведен анализ состояния безопасности полетов (БП) многодвигательных воздушных судов на этапе «ВЗЛЕТ» за их длительный период летной эксплуатации [М.А. Ерусалимский Статистический обзор данных авиационных происшествий самолетов Boing-747. М.А. Ерусалимский Анализ критериев принятия решений о прекращении или продолжении взлета самолетов транспортной категории. Техника воздушного флота - 2000 №6 (647) - LXXIV т.; Статистика АП и СИ на этапе «ВЗЛЕТ» из-за выхода ВС в режим сваливания http://www/techavia.ru/math/modeling.htm; Статистические данные NTSB - США (национальный совет по безопасности на транспорте)]. По данным NTSB только между 1983 по 1990 годами произошло более 4000 АПиСИ на этапе «ВЗЛЕТ» МВС. Из анализов следует, что за последние годы БП МВС непрерывно улучшалась на всех этапах полета, кроме этапа «ВЗЛЕТ», связанная с выкатываниями МВС за пределы ВПП при прерванных взлетах, сваливаниями на воздушном участке взлетной дистанции и столкновениями с препятствиями при движении на аэродроме и на воздушном участке взлетной дистанции. Анализы прерванных взлетов показывают, АПиСИ происходят при этом по разным причинам, из которых отказ двигателей далеко не основной. Основными причинами АП на этапе взлета являются отклонения в работе СУ, реверса тяги, отказы и разрушения систем шасси, управления ВПУ, неправильно выбранная экипажем конфигурация механизации крыла и оперения, позднее принятие решения на прекращение взлета, а также факторы, проявляющиеся почти внезапно, неожиданно для экипажа, и факторы, действующие на протяжении разбега и взлета.
Анализ состояния БП МВС на этапе «ВЗЛЕТ» выявил, что основными причинами АПиСИ являются:
- ошибочные действия/бездействие экипажа из-за позднего принятия решения на прекращение взлета;
- неудовлетворительное состояние ВПП;
- опасные воздействия внешних факторов;
- отказы силовых установок и систем ВС.
Анализ статистики АПиСИ, зафиксированный за последние 30 лет, и связанный с прекращением взлета, позволяют сделать следующие выводы:
- более половины АПиСИ указывают на принятие решения и начала действий экипажа на скорости, превышающей V1, когда практически невозможно предотвратить выкатывания ВС за пределы ВПП;
- более 30% АП произошли на мокрой, заснеженной или обледеневшей ВПП;
- 25% АП связаны с отказами СУ;
- около 25% прерванных взлетов произошли из-за разрушения пневматиков шасси и других отказов систем МВС.
Из анализа АП и СИ, также выявлено, что экипажи МВС допускают систематические ошибки:
- в установке механизации крыла и стабилизатора во взлетную конфигурацию в зависимости от фактических метеорологических условий, технического состояния ВПП, фактической взлетной массы и центровки, режимов работы силовых установок, в том числе и преднамеренную установку механизации в конфигурацию, отличающуюся от требований РЛЭ;
- в расчетах потребных взлетных скоростей V1, VП.СТ (VR), VОТР (VLOF), V2, V3, V4 (здесь и далее условные обозначения соответствуют применяемым в части 25 Авиационных правил) и взлетах с пониженным темпом роста скорости из-за пониженной тяги СУ, подтормаживания пневматиков шасси, превышения взлетной массы установленных ограничений, неудовлетворительного технического состояния ВПП с последующими выкатываниями МВС за пределы ВПП;
- взлеты с коротких ВПП, не соответствующих условиям безопасного взлета;
- взлеты с превышением максимально допустимых взлетных весов для фактических условий взлета, в том числе и преднамеренные;
- несоразмерные и некоординированные движения органами управления на подъем передней стойки и отрыв МВС, особенно, при отсутствии визуальной видимости линии горизонта закабинного пространства (ЗКП) с последующим касанием хвостовой частью фюзеляжа ВПП;
- столкновения МВС с подвижными и неподвижными препятствиями при движении по аэродрому;
- сваливания на воздушном участке полной взлетной дистанции;
- столкновения с рельефом и искусственными препятствиями на воздушном участке взлетной дистанции;
- позднее прекращение взлета из-за недостатков в информационном обеспечении экипажа по параметрам динамики разбега, боковых отклонений от оси ВПП, взлетов с застопоренными рулями и элеронами, неисправностей ВПУ (разрыв и отрыв пневматиков шасси, разворот и зависание стоек шасси в промежуточном положении, отказ управления передней стойкой, и неустановка экипажем управления передней стойкой во взлетную конфигурацию, опасное подтормаживание основных колес стоек шасси при рулении, разбеге, пробеге);
- необоснованные прекращения взлета при отказах систем МВС, взлет с которыми разрешен;
- взлеты при фактических метеоусловиях (ФМУ), не соответствующих требованиям РЛЭ и сложных метеорологических условиях (СМУ) в условиях отсутствия визуальной видимости осевой линии ВПП и боковых световых маркеров.
Проведенными исследованиями также установлено, что предпосылками к авиационным происшествиям и серьезным инцидентам (АПиСИ) являются недостатки в требованиях руководящих документов в разработке информационного обеспечения экипажа, например отсутствие в Авиационных Правилах (АП-25):
- нормируемых параметров, контролирующих положение МВС на исполнительном старте для принятия решения на взлет (максимально допустимое боковое отклонение от оси ВПП в зависимости от технических характеристик ВПП и типа МВС; максимально допустимая продольная дистанция положения МВС от торца ВПП в направлении взлета);
- требований на воздушном участке взлетной дистанции по отображению параметров, предназначенных для предотвращения столкновения с подстилающей поверхностью после отрыва МВС, предотвращения сваливания и столкновения с препятствиями в процессе доразгона МВС до безопасных скоростей набора высоты V2, V3, V4;
- системы технического зрения (система визуализации параметров подстилающей поверхности окружающей среды ЗКП) мест стоянок (МС), рулежных дорожек (РД), ВПП для обеспечения безопасного взлета МВС в сложных метеорологических условиях, в том числе при метеорологической дальности видимости на ВПП менее 200 м;
- системы предупреждения столкновений с подвижными и неподвижными препятствиями при движении МВС по аэродрому, функционирующей в реальном режиме времени (отсутствие визуально-речевого информатора опасных расстояний до препятствий);
- улучшенной интегрированной интеллектуальной визуальной наглядной информации о параметрах динамики разбега МВС по ВПП и на воздушном участке взлетной дистанции: фактическом темпе роста скорости по сравнению с расчетной (прогнозируемой) величиной, системы оценки о возможности достижения скорости V1 на ранних этапах разбега на дистанции не далее, чем LСБАЛ, по крайней мере, не позже, чем за три секунды до момента достижения МВС сбалансированной дистанции, на которой возможно как своевременное принятие решение на безопасное прекращение взлета, так и на безопасное продолжение взлета;
- визуализации прогнозируемых (расчетных) и фактических параметров чистого и полного градиентов набора высоты с оценкой возможности преодоления препятствий на минимально-допустимых расстояниях от поверхности ограничения препятствий;
- информации на командное (директорное) управление углом тангажа на подъем передней опоры шасси, отрыв МВС, доразгона МВС до скоростей V2, V3, V4.
К одним из главных недостатков в информационной поддержке экипажа относится недостаточная осведомленность экипажа о состоянии пилотажных, навигационных параметров, параметров динамики разбега и разгона на этапе взлета, параметров работы СУ и систем МВС в быстроменяющейся аэродинамической обстановке из-за несовершенства системы аварийно-предупреждающей сигнализации МВС (визуальной, звуковой и тактильной). Она должна быть выполнена с использованием принципов раннего предупреждения со статическим и динамическим упреждением срабатывания сигнализации до достижения контролируемых параметров летных эксплуатационных ограничений, без необходимости обращения экипажа к долговременной и оперативной памяти для выполнения расчетов, вспоминания многочисленных летных ограничений параметров, зависящих в свою очередь от метеоусловий, взлетного веса, высоты полета, скорости полета, углов атаки и скольжения, конфигурации механизации крыла и стабилизатора, режимов работы силовых установок, текущего местоположения МВС и др., то есть она должна интеллектуально поддерживать когнитивную деятельность экипажа.
Из анализа достигнутого уровня техники по обеспечению безопасного взлета МВС известен ряд иностранных аэрокосмических компаний, занимающихся разработкой новых технологий, которые предназначены для обеспечения взлета и посадки воздушных судов в крайне неблагоприятных метеорологических условиях, например, в условиях низкой облачности и видимости менее 200 метров. В настоящее время на рынке ИКБО известен ряд систем EFVS (Enhanced Flight Vision System) и ESVS (Enhanced Synthetic Vision System). Компания Kollsman, Inc (США) предлагает систему Kollsman All Weather Window для обеспечения эксплуатации ВС во всепогодных условиях. Компания Gulfstream Aerospace Corporation разработала систему EVS, содержащую в своем составе инфракрасный датчик (ИК) - Kollsman FLIR, HUD (Head Up Display) компании Honeywell и программное обеспечение обработки и визуализации изображений ЗКП.
Компания ВАЕ Systems провела НИР «Enhanced and Synthetic Vision Integrated Technology Evaluation (FORESITE)», подтверждающую целесообразность использования оптических и радиолокационных средств для решения задач взлета и посадки воздушного судна. Разрабатывается система технического зрения, включающая инфракрасные датчики и РЛС 3-мм диапазона для взлета и посадки («Проблемы безопасности полетов», ВИНИТИ, выпуск 2, М., 2013, с.16).
Компания CMC Electronics (Канада) разработала два вида систем: СМА-2600 I - Series™ и более дешевый вариант СМА-2610 М - Series™ в которых в первом случае используется охлаждаемые двухдиапазонные ИК-датчики (1÷3, 3÷5 мкм), во втором случае неохлаждаемые, работающие в диапазоне 8÷4 мкм ИК-датчики. Ведутся работы по системе на базе миллиметрового радара. Отображение информации ЗКП выполняется на HUD-пилотажном индикаторе на фоне лобового стекла кабины экипажа и/или МФИ (многофункциональном дисплее). Также может устанавливаться система синтезированного зрения (SVS), предоставляющая данные о рельефе местности.
Компания Max-Viz, Inc (США) разработала систему EVS2500 на базе двух инфракрасных датчиков: длинноволнового - для формирования изображений рельефа и потенциальных препятствий и коротковолнового - для обнаружения ярких сигнальных огней ВПП. Информация с обоих датчиков поступает на МФИ, где выдается улучшенное отображение подстилающей поверхности ЗКП.
Известно, что EVS система фирмы Rockwell Collins формирует ИК - изображения подстилающей поверхности ЗКП и выводит их на дисплей пилотажно-навигационной системы на лобовом стекле HGS-4000, разработки этой же компании.
Однако, все вышеперечисленные системы EVS представляют собой системы датчик-дисплей, обеспечивающие передачу на кабинные индикаторы экипажа изображения, полученного от датчиков. При этом качество изображения сильно зависит от ВВФ (внешних воздействующих факторов): фактического состояния метеорологических условий, состояния покрытия ВПП, наличия на ВПП источников яркого света.
Кроме того, в настоящее время воздушные суда ВС выполняют полеты на грунтовые ВПП и ВПП, покрытые снегом, слякотью, влагой, льдом, некатегорированные аэродромы, в СМУ, условиях тумана, снегопада и ливневых осадков, когда вышеназванные EVS не могут обеспечить экипаж отображением ЗКП надлежащего качества. Тем более, вышеприведенные системы EVS не решают задачи автоматического распознавания и выделения ВПП, РД, МС, препятствий. Поэтому задача комплексирования и отображения данных ЗКП, одновременно поступающих от телевизионных камер видимого диапазона частот, инфракрасных камер, радиолокаторов миллиметрового диапазона, лазерных локаторов (ТВ, ИК, ММР, ЛЛ) является весьма актуальной для получения высококачественного отображения ЗКП в любое время суток, любых МУ и для всех типов ВПП независимо от вида их покрытия и загрязнения.
Лидерами в области разработки новейших систем улучшенной видимости закабинного пространства в реальном режиме времени (EFVS - Enhanced Flight Vision System) являются: Sikorsky Aircraft Corp. (США), Rockwell Collins Inc. (США), Gulfstream Aerospace Corporation (США), Honeywell International (США), Garmin (США), Aspen Avionics (США), EADS Deutschland GmbH (Германия), Thales (Франция). Также известны наработки Российских ученых ФГУП «ГосНИИАС» (системы технического зрения, улучшенного и синтезированного видения), ОАО «НПО «РАДАР ММС» (малогабаритная радиолокационная система, обеспечивающая высокоточное всепогодное круглосуточное обнаружение ВВП аэродромов, с визуализацией информации на лобовом стекле кабины пилота).
Известны патенты различных российских и зарубежных фирм, частично решающие задачи информационной поддержки экипажа на взлете. Например, известна система определения максимально допустимого взлетного веса и центровки ВС - патент РФ №2400405, B64D 43/00, опубл. 27.09.2010 г. В заявках США №2011022291, G08G 5/00, опубл. 27.01.2011 и 2011130963, G01C 21/00; G06T 15/00; G09G 5/02, опубл. 02.06.2011, заявках ЕР 2355071, G01C 23/00; G08G 5/00; G08G 5/06, опубл. 10.08.2011 описываются способы и технические устройства, предназначенные для повышения ситуационной осведомленности экипажа о текущем местоположении ВС на аэродроме в условиях СМУ за счет применения средств синтезированного отображения аэродромной площади, на которую накладываются текущие навигационные параметры. В патенте РФ №646557, B64D 31/14, опубликованном 20.05.2005, описана система контроля стопорения рулей и элеронов с целью повышения безопасности взлета путем исключения возможности взлета с застопоренными рулями и элеронами.
Имеются патенты, где описываются системы, позволяющие контролировать и управлять параметрами на взлете:
- система определения местоположения ВС на ВПП в процессе разбега до достижения скорости V1, с анализаторами возможного места остановки ВС на ВПП при прекращенном взлете, с сигнализаторами недостаточности тяг двигателей - заявка ЕР №2328054, G05D 1/00, опубликованная 01.06.2011;
- система визуализации параметров, относящихся к ВПП, метеоусловий окружающей среды, параметров динамики разбега - заявка РСТ №2007006310, B64D 43/00; G05D 1/00, опубл. 2007-01-18.
Данные изобретения, несмотря на то, что они повышают уровень безопасности полетов на этапе «ВЗЛЕТ», имеют ряд существенных недостатков, например, не обеспечивают экипаж информационной поддержкой о готовности/неготовности к взлету, не вырабатывают интегрированный сигнал на продолжение/прекращение взлета при соответствии/несоответствии множества контролируемых параметров на этапе взлета требованиям РЛЭ и не представляют экипажу полный набор параметров, критичных для принятия решения по управлению МВС на этапе взлета, а также не обеспечивают экипаж информацией о параметрах внешней закабинной обстановки, что не позволяет выполнить безопасный взлет в СМУ.
В частности, некоторые технические устройства, предназначенные для повышения информированности экипажа о текущей позиции ВС на аэродроме в условиях СМУ являются неавтономными и требуют использования сложных технических устройств, расположенных на РД, ВПП, обеспечить работоспособность которых в условиях ВВФ (снегопад, дождь, повышенная влажность) является сложной технической проблемой. Системы, предназначенные для предотвращения взлета с застопоренными рулями, исключают возможность запуска двигателей на стояке, в то же время в условиях неблагоприятного ВВФ (гололедное состояние МС, РД, сильный порывистый ветер) возникает необходимость выполнения процедуры руления со всеми запущенными двигателями и застопоренными рулями во избежание их повреждения сильным порывистым ветром, а системы визуализации закабинной обстановки не функционируют в реальном режиме времени и не могут обнаружить опасные препятствия на аэродромной площади.
На этапе «ВЗЛЕТ» наибольший интерес представляют интегрированные системы контроля пилотажных, навигационных параметров, параметров работы СУ и систем ВС, а также ВВФ (окружающая среда, техническое состояние ВПП, техническое состояние ВС, внезапные факторы), обеспечивающие экипаж визуальной информацией о состоянии подстилающей поверхности окружающей среды ЗКП (система технического зрения ЗКП).
Например, известна заявка на изобретение США №2008215198, G01C 21/00; G01S 5/00, опубл. 04.09.2008 г., принятая за аналог БИСИП-МВС. Данное изобретение предназначено для мониторинга положения ВС на ВПП и динамики его движения. Сущность изобретения заключается в способе определения текущего местоположения ВС на ВПП при разбеге относительно точки старта с использованием систем глобального позиционирования («GPS»). Изобретение относится к системе предупреждения экипажа о возможном выкатывании ВС за пределы ВПП и служит для информационной поддержки экипажа в вопросах принятия решения на продолжение/прекращение взлета на данной ВПП. Система также предназначена для предупреждения экипажа о том, что ВС заняло слишком короткую ВПП и для данных условий ВС не может выполнить безопасный взлет.
Система содержит компьютер к процессору, которого подключены ПЗУ с мировой базой данных аэродромов, устройства ввода информации (клавиатура, кнопки выбора), а аудио-устройство может содержать: сирену, динамик, источник речевой информации. Система содержит множество датчиков, подключенных к процессору, которые обеспечивают процессор цифровыми данными для расчета и определения динамических характеристик разбега ВС: взлетных скоростей V1, V2, путевой скорости W. Для этих целей система содержит в своем составе датчики веса ВС, влажности воздуха, высотомер, датчик температуры окружающей среды, воздушной скорости, тяги двигателей, датчик положения рычагов управления двигателями (РУД), тормозов, курса, которые в свою очередь подключены к процессору. Датчик веса связан с датчиком положения шасси. Общий вес ВС, высота аэродрома над уровнем моря, плотность воздуха, температура окружающей среды вводятся в систему с помощью устройства ввода или сенсорного экрана. Процессор, используя фактическую взлетную массу, температуру и плотность наружного воздуха в зависимости от высоты расположения аэродрома, выполняет расчет скоростей V1 и V2 для конкретного типа ВС, причем программное обеспечение для выполнения этого расчета известна из РЛЭ ВС. В процессе руления GPS-приемник постоянно определяет текущее местоположение ВС. Поскольку координаты торцов ВПП сохранены в ПЗУ процессора, а текущие координаты непрерывно определяются GPS-приемником, процессор системы постоянно вычисляет расстояние между фактическим положением ВС на ВПП и до конца ВПП. В процессе разбега по ВПП процессор по данным GPS рассчитывает текущую путевую скорость разбега и время разбега до конца ВПП, текущее ускорение, а оставшееся расстояние до конца ВПП определяется по известным в механике формулам.
Если время, в течение которого ВС может достигнуть конца ВПП меньше, чем время необходимое для достижения скорости V2 (т.е. V2 достигается за пределами ВПП), то процессор выдает команду на безопасное прекращение взлета. Процессор непрерывно определяет расстояние, необходимое для безопасного прекращения взлета на текущей скорости. Расстояния, необходимые для прекращения взлета, а также расстояния до конца ВПП хранятся в памяти компьютера. Фактически аппаратура и ее программная часть строят зависимости расчетной скорости разбега от длины разбега: Vразб=f(Lразб) и рассчитывают величины взлетных скоростей V1, VП.СТ, Vотр, V2 в зависимости от взлетной массы Gвзл, высоты аэродрома над уровнем моря Hаэр; давления и температуры окружающей среды P0; t0, технических характеристик ВПП, скорости и направления ветра в соответствии с номограммами, приведенными в РЛЭ ВС или в соответствии с дифференциальными уравнениями динамики разбега ВС. Далее, процессор, сравнивая фактическую скорость разбега или расстояние, пройденное с момента старта с расчетными значениями, определяет, будут ли фактические характеристики удовлетворять требованиям авиационных правил (АП) достижения скорости V2 в пределах располагаемой ВПП, и предупреждает экипаж о необходимости прекращения взлета, если эти условия в процессе разбега не соблюдаются.
Дополнительно система может обнаружить, что ВС заняло слишком короткую ВПП или РД для взлета, низкий темп разгона ВС по ВПП из-за недостаточной тяги СУ, обледенения ВС, то есть система обладает возможностью раннего предупреждения экипажа, что позволяет провести процедуру прекращения взлета без выкатывания ВС за пределы ВПП.
Однако, заявленная система имеет ряд недостатков. Например: система не решает задачи предотвращения выкатываний за пределы ВПП из-за боковых отклонений ВС на разбеге и исполнительном старте, предупреждения столкновения с препятствиями на этапах выруливания, руления и разбега по ВПП, предотвращения хвостовых ударов, сваливания, столкновения с препятствиями на воздушном участке взлетной дистанции, а также не может обеспечить безопасность взлета в СМУ при видимости на ВПП менее 200 м в виду отсутствия технических средств обзора подстилающей поверхности окружающей среды.
По своей сущности для заявляемой БИСИП-МВС прототипом является заявка США №2011040431, G01C 21/00; G05D 1/00, опубликованная 17.02.2011, в которой описаны система и способы контроля взлета МВС.
Для контроля положения МВС на ВПП в процессе взлета и на воздушном участке взлетной дистанции система содержит, по крайней мере, два дисплея систем навигации и управления МВС. Система содержит средства автоматического управления (САУ), управления тормозами, управления взлетно-посадочными устройствами (ВПУ), управления силовыми установками (СУСУ), реверса тяги СУ, множество датчиков других систем, предназначенных для безопасного пилотирования МВС. Вычислители самолетовождения и управления МВС содержат базу данных воздушной навигации. Навигационная система содержит вычислительную систему судовождения ВСС (FMS), инерциальную навигационную систему (INS), информационный комплекс высотно-скоростных параметров (ИКВСП), спутниковую навигационную систему (СНС), автоматический радиокомпас (АРК) и другие неавтономные радиотехнические средства воздушной навигации.
Патент описывает систему контроля положения МВС в пространстве на этапе взлета. Система содержит визуальные информационные устройства, расположенные в кабине экипажа и устройства авионики, выходы которых связаны со входами бортовой вычислительной системы (ВВС). Кабинные средства содержат пользовательский интерфейс в виде основного пилотажного и навигационного индикаторов, средств радиосвязи и радионавигации, а также аудиоустройства. Пользовательский интерфейс может быть любым: устройства ввода-вывода (УВВ), устройства управления курсором (мышь, трекбол, джойстик, клавиатура и др.), устройство ввода текстовой информации. Вычислитель системы может содержать базу данных рельефа местности, базу навигационных данных. Различные компоненты авионики имеют как аналоговые, так и цифровые выходы, которые подключены к входам вычислителя системы.
Местоположение МВС на ВПП рассчитывается по прогнозу и сравнивается с данными, полученными в реальном времени с помощью навигационной системы. На воздушном участке определяется угол атаки и его допустимые значения. Текущее положение МВС на ВПП в процессе разбега может быть получено от INS и GPS. Позиция МВС на ВПП сравнивается с расчетной и определяется возможность безопасного продолжения взлета путем выработки визуальной или звуковой сигнализации. В процессе разбега оценивается возможность безопасного продолжения взлета путем сравнения расчетных параметров с фактической позицией МВС на ВПП. При отклонении фактических параметров разбега от расчетных система может выдать команду на прекращение взлета. База данных БВС содержит координаты торцов ВПП и осевой линии, что позволяет экипажу оценить положение МВС в точке старта (боковое уклонение, удаление от торца ВПП). И если боковое уклонение, например, больше трех метров система может выработать предупреждающие визуальные или звуковые сигналы.
Система также может контролировать взлетные скорости, скорость разбега МВС в зависимости от пройденного расстояния, определять расчетную скорость подъема передней стойки VП.СТ в зависимости от взлетного веса GВЗЛ, режимов работы силовых установок. Система может прервать взлет при определенных условиях: превышения контролируемыми параметрами пороговых значений, недостаточной скорости или ускорения, недостаточности длины ВПП, предельном отклонении от взлетного путевого угла, потере тяги СУ, обнаружения препятствий на ВПП. Система может контролировать углы атаки, рассчитывать взлетные скорости V1, VП.СТ (VR), VОТР (VLOF) в зависимости от взлетного веса и ФМУ.
К недостаткам данной системы относятся отсутствие информации о текущих боковых и продольных составляющих скорости ветра и их допустимых значениях в зависимости от коэффициента сцепления на ВПП и ее технического состояния, о фактическом взлетном весе и системы предупреждения экипажа о его превышении максимально допустимого значения для сложившихся условий взлета. В заявленном устройстве не обеспечено визуальное отображение подстилающей поверхности ЗКП для любых МУ и видов покрытия МС, РД, ВПП в реальном режиме времени, и не обеспечено отображение рельефа подстилающей поверхности ЗКП на воздушном участке взлетной дистанции, отсутствует система раннего предупреждения столкновения с подстилающей поверхностью на воздушном участке взлетной дистанции с реализацией алгоритма «впередсмотрящего», не вырабатывает управляющие команды о готовности/неготовности судна к взлету. Кроме того, отсутствует бортовая оперативно-советующая экспертная система информационной поддержки экипажа, предназначенная для предотвращения авиационных происшествий при возникновении нештатных ситуаций и особых случаев в полете.
Техническим результатом первого изобретения является расширение функциональных возможностей интегрированных комплексов бортового оборудования МВС по представлению экипажу улучшенной внутрикабинной и закабинной обстановки на этапе «ВЗЛЕТ».
Правильно спроектированный формат отображения информации с учетом требований Авиационных правил, эргономики, психофизиологических возможностей человека по восприятию и обработке информации является одним из главных факторов обеспечения безопасности полетов на воздушных судах.
Имеются патенты по мониторингу взлета МВС за счет представления экипажу различных форматов (символогии) параметров взлета на базе применения интегрированной системы визуализации параметров взлета и визуализации подстилающей поверхности окружающей среды ЗКП.
Известны заявка РСТ №2011159412, G08G 5/00; G08G 5/02, опубл. 22.12.2011, и патент США №8344911, G02F 12/00, опубл. 01.01.2013, принятые за аналоги формата отображения взлетных параметров на взлетном индикаторе, который реализован посредством аппаратного состава и программного продукта. В настоящее время известны различные технические средства, предназначенные для маркировки ВПП (светосигнальные, щиты и другие) и для определения местоположения ВС на ВПП при разбеге. Эти маркеры могут идентифицировать номер ВПП, а разноцветные сигнальные огни ВПП освещать края и осевую линию, которые позволяют несколько снизить метеоминимум для взлета и посадки и обеспечить контроль разбега/пробега ВС. Однако при крайне низкой видимости светотехнические средства не могут обеспечить безопасный взлет.
Наиболее удобным с точки зрения обеспечения безопасности взлета в СМУ является способ отображения визуального вида ВПП на индикаторах системы отображения информации (СОИ) ВС и графического синтезированного отображения ВПП, которые хранятся в базе данных аэродромов вычислителя системы, занесенных в него заранее в зависимости от курса взлета/посадки на определенном расстоянии ВС от ВПП, расположения ВС на ВПП и в процессе разбега ВС.
С помощью модуля ввода/вывода, базы данных программного обеспечения получают схемы подхода к полосе взлета, при этом на дисплей выводятся расчетные и фактические параметры взлета. В качестве носителя базы данных аэродромов (графическое отображение ВПП, названия аэродромов, в зависимости от МКвзлета) могут быть использованы: жесткий диск, бортовой компьютер, флэш-память, перезаписываемые оптические диски и другие средства, в том числе съемные. Информация в бортовую вычислительную систему FMS может вводиться с использованием линий связи или с использованием беспроводных средств связи. Графическое синтезированное изображение ВПП может отображаться на прозрачном HUD-дисплее, на которое может накладываться полетная информация. На интегрированный пилотажный индикатор IPFD может выводиться синтезированное видеоизображение ВПП, имитирующее видимость ВПП из кабины экипажа.
Однако недостатками формата представления информации экипажу в заявленных изобретениях является отсутствие вывода на взлетный индикатор параметров динамики разбега ВС, ВВФ, а также управляющих команд (визуальных текстовых сообщений) на продолжение/прекращение влета, готовности/неготовности к взлету. Кроме того, формат не содержит отображение МС, РД, ВПП и препятствий на них в реальном режиме времени.
Большой интерес представляет формат отображения информации системы мониторинга взлета TOPMS (TAKE-OFF PERFORMANCE MONITORING SYSTEM), разработанный в исследовательском центре Лэнгли NASA США (NASA Technical Paper 3403, "Flight Test of Takeoff Performance Monitoring System", David B, Middleton et al, May 1994, http://www.cs.odu.edu/~mln/ltrs-pdfs/tp3403.pdf), который может служить прототипом для формата отображения (символогии) взлетных параметров МВС.
Дисплей TOPMS содержит символьное изображение ВПП, на которое и вокруг которого наносятся подвижные и неподвижные символы динамики разбега ВС по ВПП, а также символьная АПиСИ, появляющаяся на дисплее в особых ситуациях. Символ ВПП представляет собой неподвижную вертикальную рамку желтого цвета, в конце ВПП располагается цифровой счетчик с длиной ВПП в метрах. Внутри символа ВПП отображается подвижный символ ВС, который перемещается вдоль символа ВПП в соответствии с его фактическим местоположением. С левой стороны символа ВПП расположен цифровой счетчик приборной скорости. Символ «сбалансированная расчетная дистанция достижения скорости V1», представляет собой незакрашенный треугольник зеленого цвета, располагающийся внутри символа ВПП. Символ «фактическая дистанция достижения скорости V1» представляет собой закрашенный треугольник с горизонтальной планкой напротив его основания, над которой располагается цифровой счетчик с расчетной величиной V1. Символ «линия ограничения дистанции достижения скорости V1» - планка красного цвета, расположенная поперек символа ВПП, положение которой определяется вычислителем TOPMS и соответствует самой дальней дистанции на ВПП, на которой может быть достигнута скорость V1. По взаимному расположению символов «линия ограничения дистанции достижения скорости V1», «фактическая дистанция достижения скорости V1», «расчетная дистанция достижения скорости V1» экипаж получает информацию о том, является ли уменьшение темпа роста скорости критическим. О критическом уменьшении темпа скорости сигнализирует факт, когда символ «фактическая дистанция достижения скорости V1» переходит за символ «линия ограничения дистанции достижения скорости V1», меняя свой цвет с зеленого на красный. Символ «прогнозируемая дистанция остановки ВС» расположен внутри символа ВПП в виде креста синего цвета, который появляется в момент, когда на индикатор выводится текстовое сообщение о необходимости прекращения взлета. Символы «направление и скорость ветра» представляют собой три стрелки, обозначающие полный вектор ветра, его боковую и продольную составляющие. На концах стрелок расположены цифровые счетчики скорости ветра и его составляющих. Символ «направление ветра» - подвижная стрелка изменяемой длины, направление стрелки указывает направление ветра относительно взлетного курса ВПП. Стрелки, указывающие направление боковой и продольной составляющих направления ветра, могут менять свой цвет с зеленого на красный в случае превышения боковой и продольной составляющими максимально допустимых значений для данного типа ВС. Символ «тяги СУ» по количеству СУ представляют собой прямоугольные ленточные индикаторы, обрамленные рамкой желтого цвета и расположенные по бокам символа ВПП в верхней его части. Тяга СУ определяется как нормальная и достаточная для выполнения взлета, когда высоты ленточных индикаторов соответствуют частоте вращения роторов СУ. Цвет ленточного индикатора зеленый, если частота вращения роторов СУ достаточна для выполнения безопасного взлета, и красный - если тяга СУ недостаточна для выполнения безопасного взлета. Сигнальный символ «STOP» появляется в верхней части дисплея над символом «ВПП» в случае принятия вычислителем решения на прекращения взлета.
Несмотря на решение достаточно сложной задачи информационной поддержки экипажа ВС на этапе разбега по продолжению или прекращению взлета, данный формат отображения информации не в состоянии обеспечить экипаж MB С полной параметрической и сигнальной информацией на этапах предполетной подготовки, руления, занятия исполнительного старта, разбега и на воздушном участке взлетной дистанции и обладает рядом существенных недостатков, а именно:
- отсутствует формат отображения информации, предназначенный для контроля взлетной конфигурации ВС: взлетной конфигурации механизации крыла и стабилизатора, стопорения рулей и элеронов, системы торможения, ВПУ, наличия подвижных и неподвижных препятствий при движении ВС по площади аэродрома;
- отсутствует формат отображения информации для предупреждения взлета при боковом отклонении ВС от осевой линии на разбеге, превышающем установленные ограничения, при отказах систем ВС, предупреждения хвостового удара, предупреждения столкновения ВС с рельефом и искусственными препятствиями на нем на воздушном участке взлетной дистанции;
- отсутствует формат отображения информации для безопасного перемещения ВС по площади аэродрома и безопасного взлета при низкой видимости на ВПП.
Техническим результатом второго изобретения является разработка нового формата по визуальной интеллектуальной поддержке когнитивной деятельности экипажа, повышение ситуационной осведомленности экипажа за счет снижения уровня неопределенности при принятии решения, т.е. обеспечение экипажа полной, достоверной, актуальной, непротиворечивой и интерактивной информацией.
Проведенный анализ АПиСИ позволил сформировать основные задачи, а также пути их решения для предупреждения ошибочных действий экипажа МВС, контроля адекватности действий, ликвидации дефицита информационного обеспечения, снижения психофизиологической нагрузки, своевременного и безошибочного принятия решения на взлет, по продолжению/прекращению взлета в быстроменяющейся аэродинамической обстановке на разбеге и первоначальном участке набора высоты, то есть для интеллектуальной поддержки когнитивной деятельности экипажа. Перечень работ по разработке БИСИП МВС и критериев предотвращения авиационных происшествий приведен в таблице 1.
















Технический результат первого изобретения достигается тем, что бортовая интегрированная систем информационной поддержки экипажа на этапе «Взлет» многодвигательного воздушного судна, содержащая технические средства визуализации пилотажных и навигационных параметров полета, параметров силовых установок и систем судна, систему визуализации параметров подстилающей поверхности окружающей среды закабинного пространства, многофункциональные пульты управления вычислительными системами судна, расположенные на приборных досках кабины экипажа, и пилотажный индикатор, расположенный на фоне лобового стекла кабины экипажа, электронные измерительно-вычислительные системы определения пилотажных и навигационных параметров, приемное устройство спутниковой навигационной системы, системы контроля параметров технического состояния силовых установок и систем судна, технические средства мониторинга параметров динамики разбега, внешних воздействующих факторов окружающей среды, а также определения фактического взлетного веса судна, систему контроля взлетной конфигурации судна, систему аварийно-предупреждающей сигнализации, систему определения текущего местоположения судна на взлетно-посадочной полосе в процессе разбега, прогнозируемых взлетных скоростей и прогнозируемого местоположения, формирующую управляющие команды на продолжение или прекращение взлета, а также цифровую бортовую вычислительную систему, связанную с помощью мультиплексного цифрового канала информационного обмена с вышеназванными системами судна, цифровая бортовая вычислительная система дополнительно содержит вычислительный модуль динамики взлета, модуль высотно-скоростных и метеорологических параметров, модуль летно-технических характеристик, модуль аэродинамики, модуль тяги силовых установок, модуль базы данных аэродромов и мировую базу данных рельефа подстилающей поверхности EGPWS повышенной точности в 3D формате и минимальных безопасных высот, модуль анализа и принятия решений, модуль определения максимально допустимых взлетно-посадочных весов, а так же множество баз данных, базу знаний экспертно-советующей системы, технические средства визуализации пилотажных и навигационных параметров полета выполнены в виде улучшенной бортовой автономной интегрированной системы визуализации параметров полета с интеллектуальной поддержкой когнитивной деятельности экипажа, система визуализации подстилающей поверхности окружающей среды закабинного пространства на малых высотах представляет собой улучшенную автономную бортовую интегрированную мультиспектральную систему визуализации параметров закабинной обстановки, функционирующую в реальном режиме времени независимо от времени года и суток, независимо от фактических, метеорологических условий окружающей среды и независимо от технического состояния покрытия подстилающей поверхности, а система визуализации подстилающей поверхности окружающей среды закабинного пространства на больших высотах выполнена в виде улучшенного аппаратно-программного комплекса синтезированной системы визуализации объемного рельефа подстилающей поверхности закабинного пространства с реализацией функции предупреждения столкновения судна с подстилающей поверхностью с использованием алгоритма «ВПЕРЕДСМОТРЯЩЕГО», функционирующей в реальном режиме времени, система контроля взлетной конфигурации судна выполнена в виде улучшенной системы контроля взлетной конфигурации судна, предупреждающая взлет судна с конфигурацией механизации крыла и стабилизатора, несоответствующей требованиям РЛЭ, подторможенных пневматиках тормозных колес шасси, на стояночном тормозе, с застопоренными рулями и элеронами, недостаточной тяге двигателей, недостаточном темпе роста скорости, опасных воздействиях внешних факторов, неправильной установке судна на исполнительном старте, с превышением взлетного веса установленных ограничений, бортовая система аварийно-предупреждающей сигнализации представляет собой высокоинтегрированную интеллектуальную систему информационной поддержки экипажа в его когнитивной деятельности, содержащую источники визуальной когнитивной сигнализации в виде цифровых счетчиков-сигнализаторов, всплывающих текстовых сообщений, маркеров и индексов, тактильной сигнализации в виде вибраторов штурвала и тормозных педалей с выдачей экипажу управляющих речевых команд и речевые подсказки по предупреждению авиационных происшествий и серьезных инцидентов.
Причем приемное устройство спутниковой навигационной системы представляет собой бортовой многофункциональный радиотехнический комплекс спутниковой навигационной системы и спутниковой системы связи, содержащий приемные устройства спутниковых навигационных систем, спутниковых систем связи, включая Интернет, вычислитель, антенный пост, состоящий, по крайней мере, из трех приемных антенн, размещенных вдоль фюзеляжа и на крыльях судна, а также систему с базой данных картографической информации. Причем бортовая интегрированная система дополнительно содержит информационный комплекс определения высотно-скоростных и метеорологических параметров окружающей среды, включающий многоканальный панорамный приемник воздушных давлений набегающего воздушного потока, содержащий камеру полного торможения воздушного потока с датчиками статического давления воздушного потока и температуры заторможенного потока воздуха, при этом приемные отверстия полного давления панорамного приемника посредством пневмопроводов соединены с электронным блоком, содержащим датчики полного давления и вычислитель для определения полного набора аэрометрических параметров судна. Причем система определения текущего местоположения судна на всех этапах взлета, в том числе на взлетно-посадочной полосе в процессе разбега, прогнозируемых взлетных скоростей и прогнозируемого местоположения на всех этапах взлета, определения параметров динамики взлета судна и его пространственного положения выполнена в виде электронной измерительно-вычислительной системы определения пилотажных и навигационных параметров и дополнительно содержит датчики угловых ускорений связанных осей воздушного судна и микромеханические датчики кажущихся ускорений и угловых скоростей, установленные на гранях усеченной шестиугольной пирамиды, которая монтируется в базовой системе координат судна. Причем система определения фактического взлетного веса судна представляет собой цифровой измеритель фактического взлетного веса и центровки и содержит датчики силы, давления, перемещения, лазерные дальномеры и вычислитель расчета взлетного веса с повышенной точностью. Причем бортовая интегрированная система дополнительно содержит цифровой преобразователь синтезированной речевой метеорологической информации в символьный графический вид в реальном режиме времени. Причем бортовая интегрированная система дополнительно содержит съемный загрузочный модуль, содержащий цифровой вычислитель, клавиатуру для ввода исходных переменных величин и контрольный модуль для исключения ошибочного ввода исходных данных и предотвращения ошибочных расчетов взлетных параметров судна. Причем бортовая интегрированная система дополнительно содержит оптико-электронную систему для предупреждения столкновения судна с подвижными и неподвижными препятствиями и контроля положения судна на земле относительно осевых линий рулежных дорожек, взлетно-посадочной полосы и мест стоянок. Причем улучшенная автономная бортовая интегрированная мультиспектральная система визуализации закабинной обстановки содержит мультиспектральные датчики различного физического принципа действия и вычислитель комплексирования видеоизображений от указанных датчиков. Причем датчиками различного физического принципа действия являются телевизионные приемники, радиолокаторы миллиметрового диапазона волн, инфракрасные радары, лазерные дальномеры, микрорадары. Причем улучшенная система контроля взлетной конфигурации судна выполнена с возможностью контроля установки механизации крыла и оперения во взлетную конфигурацию и содержит систему раннего предупреждения по предотвращению столкновений с рельефом местности и искусственными препятствиями на воздушном участке взлетной дистанции, систему предупреждения об опасных режимах набора высоты, систему по командному управлению углами тангажа и предупреждения хвостовых ударов при разбеге, систему контроля торможения основных пневматиков и их целостности и состояния шасси, систему предупреждения взлета с застопоренными рулями и элеронами, систему предупреждения включения реверса тяги двигателей при их отказе и одностороннем отказе, систему по предупреждению столкновения с препятствиями на этапах взлета, горизонтального полета и снижения с директорными режимами по обходу препятствий, систему по предупреждению отклонения судна от осевой линии взлетно-посадочной полосы при разбеге. Причем система определения текущего местоположения судна на взлетно-посадочной полосе в процессе разбега выполнена в виде электронного измерительно-вычислительного блока определения параметров пространственного положения и навигационных параметров, дополнительно определяющего фактические и прогнозируемые параметры траектории наборы высоты на воздушном участке взлетной дистанции. Технический результат второго изобретения достигается тем, что улучшенная система визуализации параметров внутрикабинной и закабинной обстановки полета, содержащая новый формат представления экипажу полной, достоверной, актуальной, интерактивной и интеллектуальной информации о пилотажных, навигационных параметрах, параметрах силовых установок и систем судна, параметрах внешних воздействующих факторов, параметрах окружающей среды закабинного пространства, на взлетном пилотажном индикаторе дополнительно представлены подвижное синтезированное отображение взлетно-посадочной полосы с осевой линией, номером ее порога, отображение границ максимально допустимого бокового отклонения судна на разбеге, неподвижное символьное отображение судна, наложенное на синтезированное отображение мест стоянок, рулежных дорожек, взлетно-посадочной полосы слева и справа от которого расположены когнитивные цифровые счетчики потребной и фактической скорости разбега, цифровые счетчики-сигнализаторы величины рассогласования прогнозируемой и фактической скорости разбега судна, а также когнитивные сигнализаторы с информацией о тяге двигателей в текущий момент времени, информационные окна с всплывающими когнитивными текстовыми сообщениями о готовности/неготовности судна к взлету, необходимости продолжения или прекращения взлета, информационные окна систем мониторинга шасси, максимально допустимого взлетного веса, реверса тяги двигателей, фактического ветра, взлетно-посадочных устройств, конфигурации механизации крыла и стабилизатора, системы торможения, стопорения рулей и элеронов, параметры пространственного положения с цифровыми счетчиками-сигнализаторами углов крена и тангажа, а также параметры динамики разбега судна по ВПП, а на пилотажном индикаторе на фоне лобового стекла дополнительно представлены команды на подъем передней стойки шасси, на отрыв и доразгон судна до безопасных скоростей набора высоты, команды на выдерживание оптимального угла тангажа на воздушном участке взлетной дистанции, а также команды на отворот и/или экстренный набор высоты для предотвращения столкновения с рельефом подстилающей поверхности и искусственными препятствиями, при этом визуальная поддержка когнитивной деятельности экипажа реализуется за счет создания нового формата отображения полочной информации с использованием принципов активизации визуального восприятия информации, который сводит к минимуму необходимость переноса взгляда с ЗКП на внутрикабинные индикаторы, создания более благоприятных условий по пилотированию МВС на взлете, напоминающих взлет судна в простых метеорологических условиях путем сокращения числа умственных операций, исключения нецелесообразных операций по управлению судном, представления экипажу полной, актуальной, интерактивной информации и ликвидации зон неопределенности при принятии решения по штурвальному управлению судном, а на комплексном индикаторе навигационной обстановки после достижения судном высоты 400 м экипажу дополнительно представлены отображение вертикального профиля траектории набора высоты, улучшенное отображение рельефа подстилающей поверхности, на которое наложены схемы SID, а также фактическое местоположение судна в горизонтальной плоскости, его путевая скорость, текущий курс, боковое отклонение от заданной траектории полета, командный курс для вывода судна на заданную воздушную трассу, когнитивные счетчики-сигнализаторы минимальных безопасных высот, отображение характера рельефа местности впереди судна на удалении не менее 40 морских миль в пределах ширины коридора воздушной трассы, установленной правилами полета с сигнализаторами опасной высоты в направлении полета и когнитивными командными планками по выполнению маневра для предотвращения столкновения с препятствиями. Причем на когнитивном формате представления полетной информации на этапе предполетной подготовки на взлетном пилотажном индикаторе дополнительно отображены цифровые счетчики фактических технических параметров ВПП, фактических параметров окружающей среды, допустимых в эксплуатации углов атаки и скольжения, допустимых продольной и боковой составляющих скорости ветра относительно осевой линии BПП, максимально допустимого взлетного веса, расчетных взлетных скоростей, потребных полного и чистого градиентов набора высоты, а также когнитивные цифровые счетчики-сигнализаторы потребных параметров ВПП для ожидаемых условий взлета, потребных продольной и боковой составляющих скорости ветра, фактического взлетного веса, фактических углов атаки и скольжения, наложенные на синтезированные отображения мест стоянки судна на перроне аэродрома с указанием его местоположения, рулежных дорожек и ВПП. Причем на этапе выруливания и руления на взлетном пилотажном индикаторе дополнительно отображены конфигурация механизации крыла и стабилизатора, положение рулей, стояночного тормоза, конфигурации управления передней стойкой шасси и основных стоек шасси, состояние пневматикой шасси, информации о курсе, информации о скорости и направлении ветра, состоянии силовых установок и систем судна с использованием когнитивной графики, а на синтезированное отображение мест стоянок, рулежных дорожек и ВПП накладывается графическое изображение МВС для контроля местоположения судна относительно линии разметок мест стоянок, рулежных дорожек и осевой линии ВПП и всплывающие текстовые сообщения о наличии подвижных и неподвижных препятствий и опасной скорости сближения с ними в пространстве. окружающем судно при его стоянке и движении. Причем на этапе занятия исполнительного старта на взлетном пилотажном индикаторе дополнительно отображены цифровые когнитивные счетчики-сигнализаторы углов крена и тангажа, директорный угол тангажа на подъем передней стойки, цифровые счетчики-сигнализаторы фактической скорости разбега, цифровой счетчик потребной скорости разбега в зависимости от длины разбега или времени разбега, цифровой счетчик-сигнализатор величины рассогласования между фактической и потребной скоростями разбега, цифровые счетчики-сигнализаторы продольной дистанции местоположения судна от торца ВПП в направлении взлета и цифровой счетчик-сигнализатор бокового отклонения судна от осевой линии ВПП, когнитивные текстовые сообщения о готовности/неготовности судна к взлету. Причем на этапе разбега на взлетном пилотажном индикаторе дополнительно отображены когнитивные индикаторы, предназначенные для контроля тяги силовых установок на соответствие требованиям РЛЭ. границы максимально допустимых отклонений судна от осевой линии ВПП, сбалансированная дистанция продолженного/прекращенного взлета с зоной отображения текстовых сообщений по принятию решения на продолжение/прекращение взлета, директорные углы тангажа на отрыв и доразгона судна до скоростей V2, V3, V4, всплывающий символ, предупреждающий экипаж об опасности хвостового удара, и когнитивный сигнализатор величины рассогласования между расчетной и фактической скоростями разбега с текстовым сообщением «РУБЕЖ. РЕШЕНИЕ!» в сочетании с когнитивным мнемознаком величины рассогласования фактической и прогнозируемой скорости разбега, всплывающие когнитивные текстовые сообщения «ВЗЛЕТ ПРОДОЛЖИТЪ/ПРЕКРАТИТЬ». Причем отображение параметров пространственного положения судна либо представляет собой макет судна, вращающийся по крену на фоне неподвижной линии горизонта и на фоне подвижной линии, разделяющей «пространство-небо» и «плоскость земли», при этом направление вращения органов управления соответствует направлению вращения макета и самого судна как по темпу, так и по соразмерности, либо используется отображение пространственного положения судна как «вид на линию горизонта из кабины экипажа» в сочетании с использованием командных индексов для безошибочного вывода судна экипажем из любого пространственного положения в плоскость горизонта. Причем на воздушном участке взлетной дистанции на взлетном пилотажном индикаторе дополнительно отображены директорный угол тангажа для оптимального безопасного набора высоты, директорные углы крена, тансажа и курса для выполнения маневров по предупреждению столкновения с рельефом или искусственными препятствиями, цифровые счетчики-сигнализаторы фактического градиента набора высоты, фактических углов атаки и скольжения, а также траектория набора высоты в вертикальной плоскости, цифровой счетчик-сигнализатор безопасной высоты полета с выводом текстового сообщения о приближении судна к опасной высоте, наложенные на улучшенное синтезированное отображение рельефа местности. Причем на пилотажном индикаторе на фоне лобового стекла параметрическая и сигнальная информация на малых высотах накладывается на улучшенное видеоизображение подстилающей поверхности закабинного пространства, на больших высотах на улучшенное синтезированное отображение подстилающей поверхности.
Сущность предложенных технических решений поясняется чертежами.
Фиг.1 Схема полной взлетной дистанции.
Фиг.2 Структурная схема включения измерительно-вычислительных блоков БИСИП в архитектуру ИКБО МВС.
Фиг.3 Структурная схема взаимодействия экипажа МВС с БСИП МВС;
Фиг.4 Схема связей модулей ЦБВС.
Фиг.5 Структурная схема построения оптико-электронной системы реального времени раннего предупреждения столкновения с подвижными/неподвижными препятствиями на аэродроме.
Фиг.6 Основной способ определения допустимой величины рассогласования скоростей 

Фиг.7 Схема размещения приемных отверстий полного давления на МПВД.
Фиг.8 Формат отображения полетной информации на комплексном взлетном пилотажном индикаторе.
Фиг.9 Формат отображения ноле гной информации на пилотажном индикаторе, расположенном на фоне лобового стекла (ИЛС) для дневных условий взлета.
Фиг.10 Формат отображения полетной информации на пилотажном индикаторе, расположенном на фоне лобового стекла (ИЛС) для ночных условий взлета.
АРХИТЕКТУРА ПОСТРОЕНИЯ И АППАРАТНЫЙ СОСТАВ БИСИП МВС
Архитектура построения БИСИП МВС соответствует современным требованиям построения БРЭО ВС. Руководству по вопросам разработки и сертификации интегрированного модульного авиационного радиоэлектронного оборудования (ИМА) и включает в себя:
1. Модули преобразователей первичной информации.
2. Бортовую систему передачи данных.
3. Вычислительные модули, работающие на основе бортовой вычислительной платформы.
4. Системы отображения информации и исполнительные механизмы, служащие для выполнения указанных вычислителем команд, полученных в результате обработки данных первичных источников информации и по функциональным алгоритмам, заложенным в измерительно-вычислительных системах, входящих в аппаратный состав БИСИП МВС.
На Фиг.1 изображена схема полной взлетной дистанции, на которой отражены технические характеристики ВПП, параметры взлета и начального участка набора высоты, необходимые экипажу для обеспечения безопасности полета на этапе взлета, параметры которых приведены в таблице 1.
Структура построения, схема вписывания в архитектуру ИКБО современного МВС, аппаратный состав БИСИП МВС приведена на Фиг.2, причем вновь разрабатываемые электронные измерительно-вычислительные системы закрашены серым цветом.
Аппаратно заявляемое устройство содержит улучшенный автономный бортовой интегрированный комплекс визуализации параметров полета (БИКВПП - ECDS Enhanced Cockpit Displays System) и улучшенный автономный бортовой интегрированный комплекс визуализации подстилающей поверхности окружающей среды ЗКП (БИКВЗКП - EFVS), вновь разрабатываемые электронные измерительно-вычислительные системы и блоки, улучшенную бортовую систему аварийно-предупреждающей сигнализации (БСАС - EFWS Enhanced Flight Warning System); съемный загрузочный модуль с визуализацией вводимых параметров (СЗМ - устройство ввода/вывода информации в бортовую вычислительную систему МВС), мультиспектральные формирователи технического зрения закабинного пространства, улучшенный программно-аппаратный комплекс синтезированного отображения подстилающей поверхности закабинного пространства (ESVS), оптико-электронную систему раннего предупреждения столкновения с подвижными/неподвижными препятствиями при движении МВС по аэродромной площади. Аппаратные средства БИСИП МВС взаимодействуют по мультиплексным каналам информационного обмена (МКИО) со стандартными электронными блоками ИКБО МВС.
В аппаратный состав БИКВПП входят:
1. Средства визуализации пилотажных, навигационных параметров, средства визуализации параметров СУ и систем ВС, параметров, вводимых в цифровую бортовую вычислительную систему (ЦБВС) и вычислительную систему самолетовождения (ВСС), а именно: комплексные пилотажные индикаторы (КПИ 1) левого и правого пилотов, комбинеры (комбайнеры) пилотажных индикаторов на фоне лобового стекла фонаря кабины экипажа (ИЛС 2), комплексные индикаторы навигационной обстановки левого и правого пилотов (КИНО 3), индикаторы и пульты управления вычислительных систем самолетовождения левого и правого пилотов (ПУ ВСС 4), интегрированный индикатор системы резервных параметров (ИСРП 5), многофункциональный индикатор силовых установок (СУ) и систем МВС (МФИ 6) см. фиг.2.
2. В состав БИКВЗКП входят технические средства формирования видеоизображений подстилающей поверхности окружающей среды закабинного пространства, состоящие из датчиков различного физического принципа действия (ДРФПД) мультиспектрального диапазона (формирователя технического зрения ЗКП), а именно: телевизионные приемники видимого диапазона волн (ТВ-приемники 7), радиолокатор миллиметрового диапазона волн (ММ-радар 8), инфракрасные приемники невидимого диапазона волн (ИК радары 9), лазерные локаторы (ЛЛ-Лидары 10), видеопроцессор - вычислитель улучшенного отображения закабинного пространства (ВП УОЗКП 11) - вычислитель комплексирования видеоизображений, полученных от формирователей 7, 8, 9, 10.
3. Сетевые информационно-управляющие системы 12 и 16 служат для вывода информации на индикаторы БИКВПП 1, 2, 3, 6.
4. Вновь разрабатываемые электронные измерительно-вычислительные системы и блоки БИСИП МВС на Фиг.2 отмечены серым цветом, в которые включены:
- модернизированная цифровая бортовая вычислительная система левого и правого борта ЦБВС 13;
- съемно-загрузочный модуль СЗМ 14 с визуализацией вводимых параметров в цифровую бортовую вычислительную систему МВС;
- улучшенная бортовая система аварийной сигнализации БСАС 15 с источниками речевой информации (РИ), звуковой тональной сигнализации (ЗТС), звуковых сигналов сильного привлекающего действия (ЗССПД), тактильной сигнализации (ТС); визуальных сигналов сильного привлекающего действия (ВССПД), в качестве которых могут быть использованы существующие центральные сигнальные огни (ЦСО) желтого и красного цвета;
- бортовой многофункциональный радиотехнический комплекс спутниковой навигационной системы и спутниковой системы связи, БМРК СНС - ССС 19 с расширенными функциональными возможностями;
- информационный комплекс высотно-скоростных и метеорологических параметров окружающей среды ИКВСиМП 20 с расширенными функциональными возможностями;
- блок определения пилотажных и навигационных параметров, параметров динамики разбега повышенной точности и с расширенными функциональными возможностями БПиНП 21;
- цифровой измеритель фактического взлетного веса и центровки МВС ЦИВВ 22;
- цифровой преобразователь синтезированной речевой метеорологической информации ATIS (Automatic Terminal Information Service) в символьный графический вид, DATIS 27.
5. БИСИП МВС взаимодействует по цифровым кодовым линиям связи, например AMNC 825 или CAN-BUS; CAN -Aerospace с множеством датчиков известных общих самолетных систем (ОСС) левого и правого бортов, а именно:
- системы электроснабжения СЭС 28;
- системы автоматического регулирования давления в кабине экипажа и в пассажирских салонах САРД 29;
- взлетно-посадочных устройств ВПУ 30;
- противообледенительной системы ПОС 31;
- противопожарной системы ППС 32;
- системы торможения ТОРМ. 33;
- система кондиционирования воздуха СКВ 34;
- топливной системы ТОПЛ. 35;
- вспомогательной силовой установки ВСУ 36;
- гидравлической системы ГИДР 37;
- системы управления закрылками ЗАКР 38;
- системы управления предкрылками ПРЕДКР 39;
- системы управления стабилизатором СТАВИЛ 40;
- системы стопорения рулей и элеронов СТОПОР 41;
- системы управления силовой установкой и реверсами тяги двигателей СУ СУ 42 и др.;
6. БИСИП МВС с помощью мультиплексного канала 18 информационного обмена, например: МКИО ARINC - 429 также взаимодействует с составными частями интегрированного комплекса бортового оборудования ИКБО, например:
- радиотехническими средствами навигации РТСнав 23;
- радиотехническими средствами связи РТСсвязи 24;
- системой автоматического управления САУ 25;
- множеством других блоков ИКБО 26.
7. Параметры датчиков ОСС левого и правого бортов, параметры разрабатываемых электронных измерительно-вычислительных систем и блоков БИСИП МВС, параметры составных частей ИКБО поступают на бортовые концентраторы сигналов БКС 17 левого и правого бортов.
8. Концентраторы сигналов левого и правого бортов связаны по информационной сети, например: ARINC - 664 с цифровыми бортовыми вычислительными системами ЦБВС 13 левого и правого бортов.
9. Бортовые вычислительные системы ЦБВС 13 по сетевой информационно-управляющей системе, например: ARINC - 818 см. поз.12, связаны с БИКВПП и БИКВЗП.
10. БИСИП МВС также по кодовым линия связи (КЛС) взаимодействует с приемными устройствами СНС - ПУ СНС, бортовым устройством регистрации режимов полета (БУР), информационным комплексом высотно-скоростных параметров (ИКВСП), бортовой инерциальной навигационной системой (БИНС), метеорологическим навигационным радиолокатором (МН РЛС) и другими электронными блоками ИКБО МВС (на схеме не показаны).
11. Для информационного обмена между собственными электронными измерительно-вычислительными блоками и электронными устройствами, входящими в состав ИКБО МВС, БИСИП МВС использует новые технологии информационного обмена, например: цифровую информационную сеть ARINC 664 и сетевую информационно-управляющую систему ARINC 818.
Структурная схема взаимодействия экипажа с БИСИП МВС, а именно с системой визуализации параметров полета БИКВПП и системой визуализации параметров подстилающей поверхности закабинного пространства БИКВЗКП приведена на Фиг.3, в соответствии с которой экипаж 48 воспринимает параметры 43 окружающей среды и визуальную информацию 47 о закабинном пространстве.
Многодвигательное воздушное судно (МВС) 44 содержит датчики первичной информации ДПИ 45, предназначенные для определения параметров пространственного положения, динамики разбега, высотных и скоростных параметров. Показания датчиков преобразуются в цифровой вид в преобразователях 46.
Экипаж 48 воспринимает информацию на основе зрительного, акустического, тактильного анализаторов и обоняния (в случае пожара).
На фиг.3 приведены:
49 - органы управления МВС;
50 - исполнительные механизмы или рулевые машинки;
51 - управляющие поверхности (рули, элероны, тормозные щитки и т.д.).
На Фиг.4 приведены дополнительные вычислительные модули, расширяющие функциональные возможности ЦБВС 13:
- модуль динамики взлета 52;
- модуль 53 высотно-скоростных и метрологических параметров;
- модуль 54 летно-технических характеристик конкретного типа МВС;
- модуль 55 аэродинамики;
- модуль 56 тяги силовых установок;
- модуль 57 базы данных аэродромов вылета и посадки;
- модуль 58 анализа и принятия решений;
- модули 59, 60, 61, 62 - базы данных нормируемых параметров для этапа «ВЗЛЕТ» и летных эксплутационных ограничений в соответствии с требованиями РЛЭ;
- модуль базы знаний 63 экспертно-советующей системы;
- модуль 64 определения максимально допустимых взлетных и посадочных весов;
Для ввода информации со съемного загрузочного модуля СЗМ 14 в вычислитель ЦБВС 13 служит устройство ввода-вывода УВВ 65.
Модуль 53 взаимодействует с модулем 58 по внутренней системной шине 66 ЦБВС 13.
На Фиг.5 приведена структурная схема построения оптико-электронной системы (ОЭС ЗКП 67) реального времени раннего предупреждения столкновения с подвижными/неподвижными препятствиями при движении МВС по аэродрому и в воздушном пространстве. ОЭС ЗКП 67 содержит видеопроцессор 68 для улучшенного отображения ЗКП, блок 69 микро-телевизионных камер различного диапазона ТК-1, ТК-2, блок 70 микролазерных радаров-дальномеров ЛД-1, ЛД-2, блок 71 инфракрасных камер ИК-1, ИК-2. Мини РЛС 72 расположены возле дверей, люков и в зонах подъезда к МВС спецтраспорта для техобслуживания или загрузки.
На Фиг.6 показаны расчетные изменения воздушной приборной скорости в зависимости от длины разбега МВС и практические возможные варианты ее развития в зависимости от внешних воздействующих факторов, по которым определяется допустимая величина рассогласования между фактической и расчетной скоростями разбега к моменту достижения МВС сбалансированной взлетной дистанции.
КРАТКОЕ ОПИСАНИЕ НАЗНАЧЕНИЯ И УСТРОЙСТВА ЭЛЕКТРОННЫХ БЛОКОВ БИСИП МВС
Комплексные пилотажные индикаторы КПИ 1 левого и правого пилотов представляют собой полноцветные жидкокристаллические индикаторы с диагоналями 10", 12" или 14", например, МФЦИ - 0333М (многофункциональный цифровой индикатор) производства ОАО «ЭЛАРА» или TDS-12 производства ЗАО ТРАНЗАС, которые соединены по цифровым линиям связи по сетевой информационно-управляющей системе 12 с ЦБВС 13 и предназначены для визуального отображения параметров полета. КПИ 1 левого и правого пилотов являются серийными изделиями, освоенными промышленностью Российской Федерации. С точки зрения расширения функциональных возможностей индикаторов и сокращения общего числа индикаторов в качестве КПИ 1 левого и правого пилотов могут быть использованы многофункциональные полноцветные 15" ЖК-индикаторы или индикаторы нового поколения, выполненные с применением OLED, FOLED технологий.
Комбинеры (комбайнеры) ИЛС 2 левого и правого пилотов, в качестве которых могут быть использованы Head-up Displays (HUD) фирмы Rockwell Collins Inc., представляют собой прозрачные оптические дисплеи, предназначенные для представления экипажу улучшенного видеоизображения подстилающей поверхности ЗКП (МС, РД, ВПП) и препятствий на ней, полученного с выхода видеопроцессора ВП УОЗКП 11 в реальном режиме времени, или синтезированного изображения ЗКП, на которые накладываются символьные отображения параметров пространственного положения самолета, динамики разбега, ВВФ и сигнальная информация по этим же параметрам. При этом вся необходимая экипажу информация, предназначенная для предотвращения АПиСИ, а именно: пилотажная, навигационная информация и информация о состоянии СУ и систем МВС, закабинного пространства в зонах влета и посадки сосредоточивается на одном индикаторе - комбинере ИЛС 2.
Комплексные индикаторы навигационной обстановки КИНО 3 левого и правого пилотов предназначены для отображения навигационных параметров и содержат многооконный формат представления навигационной информации. В качестве КИНО 3 могут быть использованы многофункциональные цифровые индикаторы МФЦИ - 0333М производства ОАО «ЭЛАРА», а управление форматами отображения навигационной обстановки осуществляется с помощью функциональных кнопок, расположенных на обрамлении индикатора, или управление форматами может осуществляться с помощью сенсорного экрана. При этом на КИНО 3 экипажу представляются: графическое изображение плана полета с координатами исходного пункта, поворотных пунктов и конечного пункта маршрута; текущая аэронавигационная информация; фактическая траектория движения МВС в вертикальной и горизонтальной плоскостях; текущее местоположение МВС; навигационные параметры: путевая скорость, время прибытия в пункты маршрута; радиолокационные изображения от МНРЛС; синтезированное отображение схем выхода, подхода, захода на посадку, а также схемы руления на аэродромах, места стоянок и ВПП, кроме того на КИНО 3 может выводиться улучшенное синтезированное отображение рельефа подстилающей поверхности с когнитивными сигнализаторами предупреждения столкновения с подстилающей поверхностью с реализацией алгоритма «впередсмотрящего», например, с использованием баз данных аэронавигационной информации фирм Jeppesen или Honeywell (США) и с использованием мировой базы данных EGPWS/TAWS. А на этапе взлета до набора МВС 400 м данные индикаторы применяются в качестве взлетных индикаторов.
Пульты управления вычислителей систем самолетовождения ПУ ВСС 4 могут представлять жидкокристаллические индикаторы диагональю 5" и имеют возможность отображения вводимых в вычислитель ВСС параметров и дополнительно пилотажно-навигационной информации, информации от МНРЛС и систем предупреждения столкновения с препятствиями в случае отказа основных индикаторов, т.е. служат в качестве резервных индикаторов для отображения пилотажно-навигационной информации. Индикаторы ПУ ВСС 4 имеют полноразмерную клавиатуру и дополнительные функциональные кнопки, предназначенные для решения задач точной навигации в соответствии с требованиями спецификаций ARINC-739.
Индикатор ИСРП 5 представляет собой ЖК-индикатор диагональю 5" и предназначен для визуализации пилотажной и навигационной информации, вырабатываемой резервной системой определения пилотажных навигационных параметров.
Многофункциональный индикатор МФИ 6 представляет собой ЖК-индикатор диагональю 15" и предназначен для отображения параметрической и сигнальной информации в многооконном формате систем МВС и СУ.
Бортовой интегрированный комплекс визуализации подстилающей поверхности закабинного пространства реального времени БИКВЗКП (система технического зрения) предназначен для представления экипажу улучшенного визуального изображения подстилающей поверхности (МС, РД и ВПП) в реальном режиме времени и аппаратно содержит:
- ТВ-приемник 7 - две цифровые камеры видимого малого и среднего диапазонов для низких уровней освещенности с высокой разрешающей способностью, например: RT-10XXDC (ООО "Растр Технолоджи»), которые устанавливаются в носовой части фюзеляжа для обзора подстилающей поверхности в направлении движения МВС. Угол обзора составляет ±90° от продольной оси МВС;
- ММ-радар 8 - радиолокационная станция (РЛС) переднего обзора миллиметрового диапазона, например малогабаритная 3 мм диапазона РЛС «Видимость-2000» производства ОАО «РАДАР ММС», предназначенная для обеспечения безопасного взлета/посадки, руления МВС на категорированных и некатегорированных аэродромах. Она обеспечивает автономное всепогодное, при отсутствии оптической видимости, обнаружение ВПП и получение достоверной высокоточной информации о взаимном расположении МВС и ВПП, обнаружение подвижных/неподвижных препятствий на ВПП, РД, МС, руление в условиях ограниченной оптической видимости, причаливание к пассажирским терминалам. При этом дальность обнаружения ВПП, РД составляет 3÷6 км, инфраструктуры аэродрома - 6÷8 км, техники - 4÷6 км, точность определения оси ВПП составляет 4÷5 м;
- ИК-радар 9 - три инфракрасные камеры ближнего, среднего и дальнего диапазонов, например: инфракрасные камеры с диапазонами 1÷3 мкм, 3÷5 мкм, 8÷14 мкм;
- оптический лазерный радар ЛИДАР 10, предназначенный для измерения дальности и угловых координат подвижных и неподвижных препятствий, высокоточного измерения скорости перемещения целей (подвижных препятствий), получения некоординатной информации параметров поверхности: углов наклона, кривизны, шероховатости подстилающей поверхности, определения истинной высоты полета и измерения дальности до препятствий подвижных и неподвижных объектов на ВПП, РД и стоянках. В качестве лазерных локаторов ЛЛ могут использоваться ЛЛ типа КА-98, Lotaws и другие системы измерения дальности, формирования изображений и распознавания целей. В качестве лазерных дальномеров также могут использоваться лазерные дальномеры типа Leica Rangemaster II, которые совместно с другими источниками информации обеспечивают обнаружение опасных объектов на ВПП, РД, МС.
БИКВЗКП, кроме того, содержит аппаратно-программный комплекс для формирования улучшенной инструментальной полетной видимости закабинного пространства и препятствий на нем для любых метеоусловий, любых видов покрытий МС, РД, ВПП, функционирующий в реальном режиме времени за счет обработки видеоизображений ЗКП, полученных из источников разного физического действия, комплексирования данных изображений в один формат, наиболее информативный, чем каждый из его составляющих по отдельности, и вывода улучшенного изображения на КПИ 1, ИЛС 2, КИНО 3 по мере необходимости за счет применения видеопроцессоров реального времени, а именно: видеопроцессора улучшенного отображения закабинного пространства ВП УОЗКП 11 мультиспектральной системы технического зрения, например: RT-827VP (ООО «Растр Технолоджи»), предназначенный для комплексирования изображений, полученных от его систем 7, 8, 9, 10, а также программный комплекс формирования синтезированной видимости закабинного пространства - улучшенного рельефа повышенной точности, например: EGPWS (Enhanced Ground Proximity Warning System) фирмы Rockwell Collins (США) или фирмы Garmin (США).
Электронные блоки БИСИП МВС 19, 20, 21, 22 и 27 предназначены для измерения, вычисления фактических разгонных характеристик МВС на ВПП, определения его текущего местоположения на аэродроме и на ВПП, определения параметров ВВФ, измерения фактического взлетного веса и центровки, параметров пространственного положения на этапе отрыва и набора высоты на воздушном участке взлетной дистанции и передачи пилотажной, навигационной информации, а также параметров динамики разбега в цифровые бортовые вычислительные системы ЦБВС 13 левого и правого бортов и на индикаторы БИКВПП, используя для этих целей цифровые кодовые линии связи, мультиплексный канал информационного обмена МКИО 18, цифровые информационные сети 16 и 12.
В состав разрабатываемых электронных систем и блоков БИСИП МВС входят:
- ЦБВС 13 цифровые бортовые вычислительные системы левого и правого бортов с расширенными функциональными возможностями, в качестве которых могут быть использованы бортовые цифровые вычислительные машины БЦВМ-486 или блок вычислительный БВ-9600 производства ОАО «ЭЛАРА». Функциональные возможности данных вычислителей могут быть расширены за счет ввода в них дополнительных модулей расчета параметров динамики взлета, метеорологических параметров, летно-технических характеристик, аэродинамики, тяги силовых установок и модуля базы данных: всемирной базы данных аэродромов, например: фирмы Garmin (США), улучшенной мировой базы данных рельефа местности (EGPWS) фирмы Honeywell International (США), данных летных эксплуатационных ограничений, в том числе и по ВВФ, взлетной конфигурации МВС, технических характеристик МВС, его систем и силовых установок. С целью расширения функциональных возможностей БИСИП МВС по информационной поддержке экипажа в быстроменяющейся обстановке, а именно, в принятии своевременных безошибочных решений по штурвальному управлению дополнительно вводятся: модуль анализа и принятия решений, модуль базы знаний причин возникновения АП и СИ, модуль математической модели динамики взлета, модуль анализа текущего положения и прогноза положения МВС на ВПП и на воздушном участке взлетной дистанции, с базой знаний экспертно-советующей системы, предназначенной для оценок возможностей экипажа для продолжения/прекращения взлета после достижения МВС скорости V1, с выдачей экипажу рекомендаций на продолжение полета до пункта назначения или ближайшего запасного аэродрома, необходимости выполнения экстренной посадки на аэродроме вылета или выполнения вынужденной посадки на площадки, предназначенные для этих целей;
- СЗМ 14 съемный загрузочный модуль - функциональная вычислительная система с ЖК-индикатором с возможностью отображения на индикаторе СЗМ 14 параметров, вводимых в вычислители ВСС (на схеме не показано) и цифровые бортовые вычислительные системы ЦБВС 13. Предназначен для ввода полетного задания (плана полета: координат исходного, поворотного и конечного пунктов маршрута, высоты полета) и переменных величин: P0; t0; U; δ; КСЦ; фактических технических характеристик аэродрома вылета: РДР, РДВ, РДПВ, КПТ, полных и чистых градиентов набора высоты, фактической коммерческой загрузки и количества топлива, веса снаряженного самолета, ввода аэронавигационной полетной информации (АИП) - предупреждений NOTAM, SNOTAM, наименования аэродрома и номера порога ВПП. Вычислитель СЗМ 14 содержит мировую базу данных аэродромов, модуль расчета максимально допустимого взлетного веса по следующим исходным данным, вводимым в вычислитель СЗМ 14: фактические метеорологические параметры на аэродроме вылета, фактическое техническое состояние ВПП, данные по весу пустого самолета, центровке пустого самолета, весу служебного снаряжения, весу необходимого топлива для выполнения полета, коммерческой загрузке, весу снаряженного самолета, режимов работы силовых установок. С целью исключения ошибок в расчетах взлетных скоростей, максимально допустимого взлетного веса СЗМ 14 имеет контрольный блок (базу данных расчетов, выполненных с высокой точностью для различных МУ и состояний ВПП).
- БСАС 15 - улучшенная интегрированная бортовая система аварийно-предупреждающей сигнализации с расширенными функциональными возможностями, по интеллектуальной поддержке когнитивной деятельности экипажа. Содержит в своем составе визуальные, звуковые, тактильные средства информационной поддержки экипажа, а именно: источники когнитивной визуальной сигнализации (цифровые счетчики-сигнализаторы, всплывающие окна с текстовыми сообщениями, всплывающие маркеры и индексы, визуальные сигналы сильного привлекающего действия ВССПД, реализованные в виде центральных сигнальных огней (ЦСО) желтого и красного проблескового цвета; источники звуковой сигнализации: речевой информации (РИ), звуковой тональной сигнализации (ЗТС), звуковых сигналов сильного привлекающего действия (ЗССПД); тактильные сигнализаторы (ТС) в виде вибраторов штурвала и тормозных педалей. В вычислителях разрабатываемых электронных блоков БИСИП МВС 19, 20, 21, 22, 27 и ЦБВС 13 реализован алгоритм выработки уведомляющей, предупреждающей и аварийной сигнальной информации. БСАС 15 предназначена для уменьшения вероятности ошибочных действий экипажа на всех этапах и режимах полета МВС и в том числе для выдачи совместно с ЦБВС 13 управляющих команд экипажу о готовности/неготовности к взлету и на прекращение/продолжение взлета.
- БМРК СНС-ССС 19 бортовой многофункциональный радиотехнический комплекс спутниковой навигационной системы и спутниковой системы связи с расширенными функциональными возможностями, предназначенный для высокоточного автоматического определения навигационных параметров: географических координат текущего местоположения, путевой скорости, курса, угла сноса, а также дополнительно для определения продольного и поперечного ускорения на разбеге МВС, его пространственного положения относительно местной плоскости истинного горизонта: углов крена, тангажа и угловой скорости рыскания, а также для обеспечения экипажа специальной, коммерческой связью и ИНТЕРНЕТОМ. Конструктивно БМРК СНС-ССС 19 содержит приемные устройства спутниковых систем ГЛОНАСС/GPS, спутниковых систем связи, например: приемное устройство (ПУ) спутниковой системы связи GLOBAL/STAR. БМРК СНС-ССС 19 также содержит вычислитель, антенный пост, состоящий из трех-четырех приемных антенн, размещенных вдоль фюзеляжа и на крыльях МВС, а также может содержать собственную базу данных картографической информации;
- ИКВСиМП 20 - электронный измерительно-вычислительный комплекс определения высотно-скоростных и метеорологических параметров окружающей среды МВС с расширенными функциональными возможностями. Предназначен для определения полного набора аэрометрических параметров: истинной и приборной скорости, углов атаки и скольжения, барометрической высоты на воздушном участке взлетной дистанции, температуры наружного воздуха, величины атмосферного давления у земли и на высоте полета, скорости и направления ветра, продольной и боковой составляющих скорости ветра относительно связанных осей МВС и относительно осевой линии ВПП. Конструктивно содержит: многоканальный электрически обогреваемый панорамный приемник воздушных давлений набегающего воздушного потока и воздушного потока, образованного ветром, а также камеру полного торможения воздушного потока, набегающего на судно с приемниками статического давления и температуры заторможенного потока окружающего воздуха, электронный блок, содержащий в своем составе датчики полного давления воздушного потока, процессор и элементы сервисной электроники. Многоканальный приемник воздушных давлений (МПВД) представляет собой геометрическое тело вращения, воспринимающее полное давление набегающего воздушного потока и ветра по десяти каналам приема полного давления и дополнительно имеет камеру полного торможения воздушного потока, в которой размещены датчики статического давления и температуры заторможенного потока воздуха, при этом датчики полного давления, расположенные в электронном блоке ИКВСиМП 20, соединены с МПВД пневмопроводами, а электронный блок ИКВСиМП 20 по цифровым линиям связи КЛС соединен системной шиной МКИО 18.
- БПиНП 21 - электронный измерительно-вычислительный блок определения пилотажных и навигационных параметров с расширенными функциями. Предназначен для определения параметров пространственного положения и навигационных параметров, параметров динамики разбега, а именно: углов крена, тангажа, рыскания относительно местной подстилающей поверхности (плоскости местного истинного горизонта в нормальной земной системе координат в соответствии с ГОСТ 20058-80); текущих навигационных параметров, а именно: географических координат текущего местоположения на ВПП и на воздушном участке взлетной дистанции, путевой скорости и ее продольных и боковых составляющих в связанной системе координат и в нормальной земной системе координат, пройденного расстояния с точки старта, величины бокового отклонения MB С от осевой линии ВПП, параметров динамики разбега, а именно: путевой скорости, продольной и поперечной составляющих путевой скорости относительно осевой линии ВПП, продольного и поперечного ускорения относительно осевой линии ВПП, угловой скорости рыскания в нормальной системе координат при разбеге МВС по ВПП, как в автономном режиме работы, так и в комплексированном с БМРК СНС-ССС 19 или при отсутствии информации от БМРК СНС-ССС 19 в комплексированном с режиме работы. Комплексированные режимы работы БПиНП 21 с БМРК СНС-ССС 19 и/или с ИКВСиМП 20 предназначены для высокоточного определения параметров динамики разбега и повышения надежности системы за счет минимизации ошибок первого и второго рода. БПиНП 21 в своем составе может содержать инерциальный измерительный модуль (ИИМ) собственной разработки, имеющий в своем составе:
- измерительный блок из трехосевых микромеханических акселерометров, предназначенный для измерения параметров вектора кажущегося ускорения и его составляющих в связанных осях координат МВС:  , измерения вектора ускорения поля тяжести земли и его составляющих в базовой системе координат, образованной углами крена и тангажа по отношению к нормальной земной системе координат при установке МВС на отгоризонтированной площадке в нормальных климатических условиях с обжатиями стоек шасси и пневматиков колес в соответствии с требованиями РЛЭ и направлением продольной оси МВС в сторону географического Северного Полюса;
, измерения вектора ускорения поля тяжести земли и его составляющих в базовой системе координат, образованной углами крена и тангажа по отношению к нормальной земной системе координат при установке МВС на отгоризонтированной площадке в нормальных климатических условиях с обжатиями стоек шасси и пневматиков колес в соответствии с требованиями РЛЭ и направлением продольной оси МВС в сторону географического Северного Полюса;
- измерительный блок из трехосевых микромеханических гироскопов, предназначенный для определения параметров вектора абсолютной угловой скорости вращения и его составляющих в связанных осях МВС  ;
;
- трехосевой измерительный блок, предназначенный для определения суммарной напряженности магнитного поля Земли (МПЗ) и напряженности магнитного поля МВС (векторный магнитометр) и ее составляющих  в связанных осях МВС;
в связанных осях МВС;
- датчики температуры среды, окружающей измерители векторов  ;
;  ;
;  ;
;
- микромеханический трехосевой измерительный блок, предназначенный для измерения угловых ускорений связанных осей МВС.
Кроме того, БПиНП 21 содержит в своем составе вычислитель и элементы сервисной электроники (источники вторичного питания, аппаратные сглаживающие фильтры, многоканальные аналоговые цифровые преобразователи, модули связи и сопряжения и др.). БПиНП 21 по КЛС связан с системной шиной МКИО 18 и выдает информацию в блоки концентраторов сигналов БКС 17, которые в свою очередь через информационные сети 16, например: спецификации ARING 664 подключаются к ЦБВС 13, в которой производится дополнительные вычислительные процедуры, необходимые для формирования однозначной и интуитивно понятной экипажу пилотажной, навигационной информации, необходимой для интеллектуальной поддержки когнитивной деятельности экипажа. Данная информация передается через сетевые информационно-управляющие системы 12 для отображения на индикаторах БИКВПП 1, 2, 3, 6.
С целью минимизации дрейфа нуля (показания микромеханических акселерометров и датчиков угловых скоростей при отсутствии на входе датчиков измеряемой информации) во времени и от запуска к запуску микромеханические акселерометры и микромеханические гироскопы, датчики угловых ускорений могут устанавливаться на гранях шестигранной пирамиды, что значительно повысит точность определения параметров пространственного положения и навигационных параметров за счет улучшения стабильности передаточных коэффициентов датчиков первичной информации: линейных ускорений и угловых скоростей, поскольку в этом случае инерционные чувствительные элементы устанавливаются в состояние устойчивого равновесия.
- ЦИВВ 22 цифровой измеритель фактического взлетного веса МВС, предназначенный для измерения фактического взлетного веса МВС на стоянке и на исполнительном старте, и который содержит датчики фактического веса;
- DATIS 27 цифровой датчик - преобразователь синтезированной речевой информации ATIS (AUTOMATIC TERMINAL INFORMATIOIN SERVICE) в цифровую с последующим преобразованием речевой информации в символьный и графический вид за счет использования системы ACARS (Aircraft Communication Addressing and Reporting System), адресно-отчетной системы авиационной связи фирмы ARINC.
Поскольку при разработке БИСИП МВС используется известная система EFVS/SVS/CVS (Enhanced Flight Visual System/ Synthetic Vision System/ Combine visual system), то визуализация пилотажных и навигационных параметров и визуализация ЗКП, а также представление экипажу комбинированного отображения пилотажной и навигационной информации, наложенной на ЗКП, осуществляется в соответствии с требованиями КТ-315 и является стандартной. Отличием является то, что индикаторы ИЛС 2 разрабатываются с использованием новейших технологий OLED, TOLED, построенных на прозрачной пленке - подложке и наращенных на нее органических светодиодов, цвет которых управляется электрическим током. Они обладают высокой яркостью и контрастностью с высоким разрешением цветности изображения, которые втрое выше, чем у обычных жидкокристаллических индикаторов, применяемых ранее.
ОПИСАНИЕ РАБОТЫ РАЗРАБАТЫВАЕМЫХ БЛОКОВ БИСИП МВС
Экипаж воспринимает параметры 43 (Фиг.3) окружающей среды и визуальную информацию 47 о закабинном пространстве как визуально через остекление кабины фонаря экипажа в простых метеоусловиях, так и с помощью технических средств 1÷6 БИКВПП и с помощью БИКВЗКП и его технических средств 7÷11, используя зрительный, акустический и тактильный анализаторы.
Система визуализации БИКВПП БИСИП МВС позволяет экипажу на ранних этапах разбега распознавать опасные ситуации и помогать принимать правильные решения на продолжение/прекращение взлета, предотвращать хвостовые удары на разбеге и сваливания из-за выхода на критические углы, а также избегать столкновения с препятствиями при движении по площади аэродрома и на воздушном участке взлетной дистанции за счет того, что показания датчиков первичной информации ДПИ 45 МВС 44 через преобразователи 46 поступают в разрабатываемые электронные блоки БИСИП МВС 19, 20, 21, 22, в которых преобразуются в физические величины: текущей скорости разбега, ускорения, углов крена и тангажа, высоты, углов атаки и скольжения. А информация об отказах СУ и систем МВС по КЛС ОСС и МКИО 18 поступает на вход бортовой вычислительной системы ЦБВС 13, в модуле прогноза и анализа которого на основе расчетных (прогнозируемых) характеристик параметров динамики взлета сравниваются характеристики параметров взлета, полученные в реальном режиме времени, и которые в свою очередь сравниваются с параметрами, допустимыми в эксплуатации на этапе «ВЗЛЕТ». На их основании ЦБВС 13 вырабатывает управляющие команды о готовности/неготовности экипажа к взлету, о возможности продолжения или прекращения взлета. Системой БСАС 15 экипаж обеспечивается уведомляющей, предупреждающей, аварийной, сигнальной информацией, функционирующей на различных физических принципах действия (визуальном, звуковом, тактильном). Экипаж, используя показания индикаторов 1÷6 и аварийно-предупреждающую сигнальную информацию, вырабатываемую БСАС 15, воздействуя на органы управления 49 через систему САУ 26 или непосредственно на исполнительные механизмы 51 (рулевые машинки), воздействует на управляющие поверхности МВС (элероны, рули высоты, рули направления, стабилизатор, систему торможения (основную и аварийную), управление передним колесом, управление СУ (РУДы), реверсы тяги СУ, механизацию крыла (закрылки, предкрылки, спойлеры, интерцепторы, тормозные щитки) эффективно предотвращает выкатывания МВС за пределы ВПП и сваливания, столкновения с препятствиями на аэродромной площади и воздушном участке взлетной дистанции, поскольку экипажу созданы благоприятные условия, интуитивно напоминающие взлет в простых метеорологических условиях с дополнительным обеспечением возможности распознавать на раннем этапе разбега опасные ситуации за счет управляющих команд, выдаваемых ЦБВС 13.
Разрабатываемые блоки БИСИП МВС работают следующим образом.
Работа МПВД. Неподвижный сферический МПВД, установленный на поверхности фюзеляжа в месте наименьшего «затенения» воздушного потока, набегающего на МВС его конструкцией, в том числе и ветра на этапах стоянки, руления и занятия исполнительного старта, воспринимает полное давление набегающего воздушного потока по восьми каналам приема полного давления в азимутальном направлении относительно продольной оси МВС и по трем каналам приема полного давления вертикальной плоскости симметрии МВС см. фиг.7. Центральное отверстие P1, и отверстие P5 совпадают с продольной осью самолета, а отверстия P2 и P8 расположены по отношению к отверстию P1 под углом 15° к горизонтальной плоскости, а отверстия P3, и P7 расположены вдоль поперечной оси МПВД, отверстия P4 и P6 под углом 45° к отверстию P5, а отверстия P9 и P10 расположены в вертикальной плоскости симметрии под углами 15° по отношению к отверстию P1. МПВД имеет дополнительно камеру полного торможения воздушного потока, в которой размещены датчики температуры заторможенного потока воздуха и его статического давления (см. фиг.7).
Каналы полного приема давления P1÷P10 по пневмопроводам соединены с датчиками абсолютного давления электронного блока ИКВС и МП 20, а показания датчиков температуры заторможенного потока и статического давления по аналоговым линиям связи поступают на многоканальный аналоговый цифровой преобразователь этого же блока. С помощью МПВД, установленного в набегающем воздушном потоке, воспринимаются полные давления в горизонтальной и вертикальной плоскостях в связанной скоростной системе координат, определяется угловое положение вектора истинной воздушной скорости: углы атаки и скольжения, статическое давление набегающего воздушного потока, температура заторможенного потока воздуха, а также истинная и приборная скорости полета, барометрическая высота полета, скорость и направление ветра при нахождении МВС на стоянке и исполнительном старте [см. Браславский Д.А. Приборы и датчики летательных аппаратов М. Машиностроение 1972. 392 с; Петунин А.Н. Методы и техника измерения параметров газового потока. М. Машиностроение 330 с]. Поскольку диапазон измерения углов атаки и скольжения ограничивается величиной порядка ±30°, то для их определения с точностью 0,2° СКО (среднеквадратическое отклонение) и определения направления ветра с точностью порядка 10° СКО (в соответствии с требованиями Наставления по метеорологическому обеспечению полетов) для МВС транспортной категории достаточно иметь МПВД, содержащий восемь приемных отверстий полного давления в горизонтальной плоскости и три приемных отверстия в вертикальной плоскости.
Работа ИКВС и МП 20
Вычислитель ИКВС и МП 20, используя показания датчиков полного давления, статического давления, датчика температуры заторможенного потока воздуха, набегающего на воздушное судно, рассчитывает полный набор высотно-скоростных параметров МВС в соответствии с уравнениями:
Vx=f1 (P1-P8; P1-Р2; Р1-Рсм; Т∗);
Vy=f2 (P1-Р9; P1-P10; P1-Рсм; Т∗);
Vz=f3 (Р3-Р2; P3-Р4; P3-Рсм; Р7-Р6; P7-P8; P7-Pсм; T∗)
Воздушная скорость и ее составляющие в связанной скоростной системе координат V=f(Vx; Vy; Vz) определяются в зависимости от отношения или разности давлений в приемных отверстиях P1-P8, например как  ;
;  или
или  ;
;  .
.
По данным, измеренным с помощью датчиков абсолютного давления в приемных отверстиях P1; P2; P3; P4; P5; P6; Р7; P8 P9; P10 датчика статического давления и Pсм;, датчика температуры заторможенного потока воздуха T∗, расположенных в камере полного торможения набегающего воздушного потока, вычислитель электронного блока ИКВСиМП 20 рассчитывает в соответствии с системой уравнений модуль вектора истинной воздушной скорости и ее составляющие относительно продольной оси МВС, а также его угловое положение в связанной скоростной системе координат по приведенным ниже уравнениям:
 ;
;
 ;
;
 ,
,
где α=ψα - угол атаки; β=ψβ - угол скольжения МВС, равные углам скоса плоского воздушного потока в плоскости рыскания ψβ в ортогональной с ней плоскости ψα;
Vx; Vy; Vz - составляющие истинной или приборной воздушной скорости в связанной скоростной системе координат.
Модуль вектора истинной воздушной скорости, углы атаки и скольжения, вертикальная скорость определяется из выражений:
 ;
;
 ;
;  ;
;  ;
;
 ;
;  , где
, где
OXZ и OXY - направления связанных осей координат относительно центра масс МВС в соответствии с ГОСТ 20058-80;
P1; P2; P3; P4; P5; P6; Р7; P8 P9; P10 - полные давления набегающего воздушного потока в приемных отверстиях МПВД;
Рсм - статическое давление снятое датчиком в камере торможения;
Т∗ - температура заторможенного потока воздуха, снятая датчиком в камере торможения;
В плоскости параллельной плоскости симметрии МВС OXZ на поверхности МПВД по окружности расположены отверстия для забора полного давления воздушного потока Р1-Р8 при стоянках МВС на МС, РД (предварительном старте), ВПП (исполнительном старте), предназначенные для определения скорости направления ветра, когда отсутствует информация о воздушной скорости МВС. В этом случае МПВД представляет приемники полного давлений повторяющихся в азимутальном направлении, с приемниками полного давления: P1; P2; P3; P4; P5; P6; Р7; P8. В зависимости от направления ветра к продольной оси МВС формируются угловые характеристики параметров воздушного потока в соответствии с приведенными на рис.8.37 стр.385 [В.М. Солдаткин. Методы и средства измерений аэродинамических углов летательных аппаратов. Казань 2001]. В соответствии с изложенными материалами в данной литературе формируется массив информативных сигналов в виде перепадов давлений  , где Ki=f(ψi) - коэффициент, характеризующий угловое положение i-й трубки полного давления относительного направления набегающего воздушного потока, который используется для получения информации о скорости и направлении ветра. Далее по гипсометрическим формулам, используя зависимости по [ГОСТ 5214-74 и ГОСТ 4701-81 Таблица аэродинамическая. Динамические давления и температура торможения воздуха для скорости от 10 до 4000 км/час. Параметры М. Издательство стандартов 1974 - 239 с и ГОСТ 4701-81 Атмосфера стандартная. Параметры, М Издательство стандартов. 1981 - 179 с.] определяются: приборная скорость, плотность воздуха, высота полета, температура наружного воздуха, истинная воздушная скорость, плотность воздуха на высоте полета, вертикальная скорость в соответствии с их функциональными зависимостями от полного давления набегающего потока, статического давления и температуры заторможенного потока воздуха. Эмпирические формулы здесь не приводятся в виду их громоздкости.
, где Ki=f(ψi) - коэффициент, характеризующий угловое положение i-й трубки полного давления относительного направления набегающего воздушного потока, который используется для получения информации о скорости и направлении ветра. Далее по гипсометрическим формулам, используя зависимости по [ГОСТ 5214-74 и ГОСТ 4701-81 Таблица аэродинамическая. Динамические давления и температура торможения воздуха для скорости от 10 до 4000 км/час. Параметры М. Издательство стандартов 1974 - 239 с и ГОСТ 4701-81 Атмосфера стандартная. Параметры, М Издательство стандартов. 1981 - 179 с.] определяются: приборная скорость, плотность воздуха, высота полета, температура наружного воздуха, истинная воздушная скорость, плотность воздуха на высоте полета, вертикальная скорость в соответствии с их функциональными зависимостями от полного давления набегающего потока, статического давления и температуры заторможенного потока воздуха. Эмпирические формулы здесь не приводятся в виду их громоздкости.
Продольные и поперечные составляющие скорости ветра ±Ux; ±Uz относительно продольной оси МВС ОХ в связанной системе координат на стоянке ВС, РД и исполнительном старте (при отсутствии информации о воздушной и путевой скорости) определяется как: ±Ux=±Vx; ±Uz=±Vz. При движении МВС в воздушном пространстве с известными параметрами V, W, γ, ψ, ϑ данные воздушной скорости V=f(Vx; Vy; Vz), вычисленные в связанной системе координат МВС, перепроектируются в нормальную земную систему координат в соответствии с ГОСТ 20258-80, используя для этих целей текущие параметры пространственного положения МВС (γ, ψ, ϑ), которые непрерывно поступают в вычислитель ИКВСиМП 20 по цифровым, кодовым линиям связи от блока БПиНП 21. В этом случае координатные преобразования осуществляются по известным формулам преобразования проекции вектора в матричном виде (направляющие косинусы для преобразования составляющих векторов по ГОСТ 20058-80). Отсюда понятно, что на стоянке ВС, когда набегающий воздушный поток отсутствует, а углы крена и тангажа малы, ИКВСиМП 20 фактически определяет продольную и поперечную составляющие скорости ветра ±Ux; ±Uz в связанной скоростной системе координат, а также величину атмосферного давления на уровне ВПП или ее порогов, температуру наружного воздуха. При этом выходными характеристиками ИКВСиМП 20 являются высотно-скоростные параметры МВС, а именно: Vпр; Vист; Нбар; Vy; P0; T0; Vx; Vy; Vz, α, β а также параметры ветра: U и δ, и продольные и боковые составляющие скорости ветра ±Ux; ±Uz, когда воздушное судно неподвижно относительно земной поверхности. Для определения параметров ветра при движении МВС вышеназванные параметры по КЛС поступают на первый вход модуля 53 высотно-скоростных и метрологических параметров ЦБВС 13, на второй вход которого поступает информация о восточной и северной составляющих путевой скорости WE; EN и информация о текущем курсе МВС ψ, вырабатываемые блоком БПиНП 21, как а автономном его режиме работы, так и в комлексированном режиме от БМРК СНС-ССС 19. Модуль динамики взлета 52 вычислителя ЦБВС 13 по известным формулам координатных преобразований и известным величинам WE; WN и ψ преобразовывает составляющие путевой скорости WE; WN в продольную и поперечную составляющие путевой скорости в связанной системе координат ±WX; ±WZ, которые позволяют дополнительно определить текущий угол сноса МВС:  на воздушном участке взлетной дистанции. Далее модуль 53 вычислителя ЦБВС 13 определяет продольные и поперечные составляющие скорости ветра как Uв; Uп=Vx-Wx (встречную и попутную составляющие): ±Uб=Vz-Wz (боковые составляющие в левый и правый борт) относительно осевой линии ВПП, сравнивает их текущие значения с пороговыми значениями в зависимости от состояния ВПП для конкретного типа МВС Uв; Uп=f1(Ксц); ±Uб=f2(Кcц), хранящихся в модуле базы данных 57 ЦБВС 13. Если при этом параметры фактического ветра
на воздушном участке взлетной дистанции. Далее модуль 53 вычислителя ЦБВС 13 определяет продольные и поперечные составляющие скорости ветра как Uв; Uп=Vx-Wx (встречную и попутную составляющие): ±Uб=Vz-Wz (боковые составляющие в левый и правый борт) относительно осевой линии ВПП, сравнивает их текущие значения с пороговыми значениями в зависимости от состояния ВПП для конкретного типа МВС Uв; Uп=f1(Ксц); ±Uб=f2(Кcц), хранящихся в модуле базы данных 57 ЦБВС 13. Если при этом параметры фактического ветра 
На этапах набора высоты, горизонтального полета, снижения и захода на посадку, когда известны данные об истинной воздушной скорости, курса, путевой скорости и угла сноса, информация о которых, снятая с ИКВСиМП 20, БПиНП 21, БМРК СНС-ССС 19, непрерывно поступают на входы модулей 52, 53, 54, 55, 56 ЦБВС 13. Вычислительный модуль 53 ЦБВС 13 определяет метеорологическое направление ветра δ или его навигационное направление - НВ (навигационный ветер) и силу ветра U путем решения известного уравнения навигационного треугольника скоростей. При этом продольная и поперечная составляющие скорости ветра вычисляются по текущему курсу, полученному от БПиНП 21 или с высокой точностью от БМРК СНС-ССС 19.
Кроме того, модуль 64 ЦБВС 13 по известным значениям U; δ; Р0; t0, фактическому состоянию ВПП (Ксц, фактические длины РДР, РДПВ, РДВ, КПТ, загрязнения ВПП), информации о Gконстр.; Gтопл.; Gкомер.; САХфак%; ηЧИСТ;  по алгоритму, изложенному в РЛЭ для конкретного типа МВС или алгоритму, приведенному в источнике информации М.Р. Алкина, Н.А. Зайцева д.т.н., И.В. Калинина, к.т.н, Т.П. Ткачева, к.т.н. «Оценка влияния начальных условий взлета на выполнение заданной схемы вылета». ОАО «Московский институт электромеханики и автоматики»; М.Р. Алкина, И.В. Калинина «Автоматизация расчета взлетных летно-технических характеристик». «Гироскопия и навигация» СПб. 2005, рассчитывает максимально допустимый взлетный вес, а также максимально допустимый посадочный вес.
по алгоритму, изложенному в РЛЭ для конкретного типа МВС или алгоритму, приведенному в источнике информации М.Р. Алкина, Н.А. Зайцева д.т.н., И.В. Калинина, к.т.н, Т.П. Ткачева, к.т.н. «Оценка влияния начальных условий взлета на выполнение заданной схемы вылета». ОАО «Московский институт электромеханики и автоматики»; М.Р. Алкина, И.В. Калинина «Автоматизация расчета взлетных летно-технических характеристик». «Гироскопия и навигация» СПб. 2005, рассчитывает максимально допустимый взлетный вес, а также максимально допустимый посадочный вес.
Работа БП и НП 21
Основана на том, что текущие параметры пространственного положения γ, ψ, ϑ относительно плоскости истинного горизонта, образованной нормальной системой координат в соответствии с ГОСТ 20058-80, текущее местоположение МВС в географической системе координат и истинная высота полета на воздушном участке полной взлетной дистанции, вычисляются с использованием известных алгоритмов функционирования бесплатформенных инерциальных навигационных систем (БИНС) и курсовертикалей при наличии полного набора данных от источников первичной информации, размещенных в инерциальном измерительном модуле (ИИМ - не показан). При этом БПиНП 21 может функционировать как в автономном режиме, так и в комплексированных режимах с БМРК СНС-ССС 19, при наличии навигационной информации СНС и/или в комплексированном режиме работы с ИКВСиМП 20 при отсутствии навигационной информации от СНС. Блок чувствительных элементов ИИМ содержит измерители вектора кажущегося ускорения и его составляющих  , вектора абсолютной угловой скорости вращения МВС с его составляющими
, вектора абсолютной угловой скорости вращения МВС с его составляющими  относительно его связанных осей X, Y, Z, суммарного вектора напряженности магнитного поля Земли (
относительно его связанных осей X, Y, Z, суммарного вектора напряженности магнитного поля Земли ( ) и магнитного поля МВС (
) и магнитного поля МВС ( ) с его составляющими HX, HY, HZ на связанные оси МВС в месте установки векторного магнитометра и вектора ускорения силы поля тяжести Земли с его составляющими относительно связанных осей судна
) с его составляющими HX, HY, HZ на связанные оси МВС в месте установки векторного магнитометра и вектора ускорения силы поля тяжести Земли с его составляющими относительно связанных осей судна  . Вычислитель БПиНП 21 по известным алгоритмам работы БИНС, например: приведенных в книге «Ориентация и навигация подвижных объектов: современные информационные технологии» под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского - М. Физ-мат лит., 2006 - 424 с. определяет пилотажные параметры, а именно: углы крена, тангажа, курс, истинную высоту, а также навигационные параметры: путевую скорость W, северную WN и восточную WE составляющую путевой скорости, путевой угол ПУ, географические координаты местоположения МВС φ, λ. Однако, БПиНП 21 отличается от БИНС тем, что его чувствительные элементы устанавливаются в базовой системе координат, образованной установкой МВС в нормальных климатических условиях на специально отгоризонтированной площадке с выпущенными и убранными шасси, причем продольная ось МВС направляется на географический Северный Полюс, что позволяет заранее определить текущие углы связанных осей МВС относительно нормальной земной системы координат, и тем самым повысить точность определения параметров пространственного положения и местоположения МВС на разбеге и на воздушном участке взлетной дистанции. Кроме того, в целях уменьшения погрешностей определения пилотажных и навигационных параметров, накапливающихся со временем ошибок из-за параметров нестабильности ДПИ, реализованных на микромеханических датчиках (особенно микромеханических гироскопов - ММГ) из-за дрейфов нуля и передаточных коэффициентов в запуске, от запуска к запуску, которые приводят к дрейфу угловых координат пространственного положения МВС, большим погрешностям определения путевой скорости и координат местоположения, к неприемлемым значениям в соответствии с требованиями стандартов навигационных определений RNP (RNP - требуемые навигационные характеристики - перечень навигационных характеристик, необходимых для выполнения полетов в пределах установленного воздушного пространства, а тип RNP - величина удерживания, выраженная через расстояние в морских милях от планируемого местоположения, в пределах которого воздушные суда будут находиться в течение, как минимум, 95% общего полетного времени), дополнительно работа БПиНП 21 отличается от известных типовых алгоритмов БИНС тем, что в заявляемом устройстве применяется способ отключения/включения интеграторов показаний ММГ ωx, ωy, ωz по сигналам высокочувствительных датчиков угловых ускорений. Т.е. при отсутствии сигналов с ММГ ωx, ωy, ωz интеграторы отключены и накопления ошибок не происходит. Вычислитель БПиНП 21 в отличие от алгоритмов работы БИНС использует различные способы определения пилотажных и навигационных параметров в зависимости от фактических условий полета.
. Вычислитель БПиНП 21 по известным алгоритмам работы БИНС, например: приведенных в книге «Ориентация и навигация подвижных объектов: современные информационные технологии» под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского - М. Физ-мат лит., 2006 - 424 с. определяет пилотажные параметры, а именно: углы крена, тангажа, курс, истинную высоту, а также навигационные параметры: путевую скорость W, северную WN и восточную WE составляющую путевой скорости, путевой угол ПУ, географические координаты местоположения МВС φ, λ. Однако, БПиНП 21 отличается от БИНС тем, что его чувствительные элементы устанавливаются в базовой системе координат, образованной установкой МВС в нормальных климатических условиях на специально отгоризонтированной площадке с выпущенными и убранными шасси, причем продольная ось МВС направляется на географический Северный Полюс, что позволяет заранее определить текущие углы связанных осей МВС относительно нормальной земной системы координат, и тем самым повысить точность определения параметров пространственного положения и местоположения МВС на разбеге и на воздушном участке взлетной дистанции. Кроме того, в целях уменьшения погрешностей определения пилотажных и навигационных параметров, накапливающихся со временем ошибок из-за параметров нестабильности ДПИ, реализованных на микромеханических датчиках (особенно микромеханических гироскопов - ММГ) из-за дрейфов нуля и передаточных коэффициентов в запуске, от запуска к запуску, которые приводят к дрейфу угловых координат пространственного положения МВС, большим погрешностям определения путевой скорости и координат местоположения, к неприемлемым значениям в соответствии с требованиями стандартов навигационных определений RNP (RNP - требуемые навигационные характеристики - перечень навигационных характеристик, необходимых для выполнения полетов в пределах установленного воздушного пространства, а тип RNP - величина удерживания, выраженная через расстояние в морских милях от планируемого местоположения, в пределах которого воздушные суда будут находиться в течение, как минимум, 95% общего полетного времени), дополнительно работа БПиНП 21 отличается от известных типовых алгоритмов БИНС тем, что в заявляемом устройстве применяется способ отключения/включения интеграторов показаний ММГ ωx, ωy, ωz по сигналам высокочувствительных датчиков угловых ускорений. Т.е. при отсутствии сигналов с ММГ ωx, ωy, ωz интеграторы отключены и накопления ошибок не происходит. Вычислитель БПиНП 21 в отличие от алгоритмов работы БИНС использует различные способы определения пилотажных и навигационных параметров в зависимости от фактических условий полета.
В режиме установившегося горизонтального прямолинейного полета, когда величины ωx, ωy, ωz равны или близки к нулю, т.е. при отсутствии сигналов с датчиков угловых скоростей связанных осей МВС, углы крена и тангажа определяются с помощью показаний прецизионных датчиков линейных ускорений, установленных в базовой системе координат, сигналы которых пропорциональны действующей величине проекции вектора силы тяжести . Величины этих проекций зависят от положения корпуса измерителя, установленного жестко в центре масс МВС в базовой системе координат, относительно плоскости земного горизонта - местной плоскости истинного горизонта, и определяются углами крена и тангажа - продольными и поперечными углами наклона корпуса измерителя к плоскости местного истинного горизонта.
В режимах маневрирования МВС в воздушном пространстве с угловыми скоростями ωx, ωy, ωz (ωy, ωϑ, ωψ) или с угловыми скоростями крена, рыскания и тангажа, вычислитель БПиНП 21, используя показания датчиков угловых скоростей связанных осей МВС и кватернионное интегрирование, вырабатывает информацию о пространственном положении МВС: углах крена, тангажа и рыскания относительно местной плоскости истинного горизонта, построенного вычислителем БПиНП. Выходной информацией блока БПиНП 21 также являются восточная WE и северная WN составляющие путевой скорости, полученные путем интегрирования линейных ускорений связанных осей OX и OZ, полученные в свою очередь путем перепроектирования показаний акселерометров, установленных в базовой системе координат в нормальную земную систему координат, используя текущие углы крена, тангажа и рыскания, а также с учетом компенсаций ускорений Кориолиса и ускорений, связанных с криволинейностью движения МВС в околоземном воздушном пространстве. Координаты местоположения МВС φ, λ вычисляет путем повторного интегрирования, полученных WN и WE по известным алгоритмам работы инерциальных навигационных систем (ИНС) с применением интегрирования уравнений Пуассона или кватернионного интегрирования, решения которых не имеют зон неопределенностей. Причем в блоке интегрирования осуществляется аналитическое построение плоскости местного горизонта, относительно которой и определяются углы крена, тангажа и рыскания. В отличие от известных алгоритмов БИНС, формирование пилотажных, навигационных параметров в БНиНП 21 осуществляется по известной величине магнитного курса ψM, вычисленного по измерениям вектора магнитной индукции, полученного от векторного магнитометра  по известному выражению:
по известному выражению:
 , где
, где
Bx, By, Bz - проекции вектора  индукции геомагнитного поля на оси связанной системы координат МВС [см. Ориентация и навигация подвижных объектов: современные информационные технологии. Под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского - М. Физ-мат лит., 2006 - 424 с.]
индукции геомагнитного поля на оси связанной системы координат МВС [см. Ориентация и навигация подвижных объектов: современные информационные технологии. Под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского - М. Физ-мат лит., 2006 - 424 с.]
Величины WN и WE перепроектируются в связанную систему координат МВС, но ввиду малости углов крена и тангажа на исполнительном старте по известным в тригонометрии формулам и известном курсе вычисляются продольная и поперечная составляющие путевой скорости в связанной системе координат Wx; ±Wz, которые необходимы для оценки темпа роста скорости на разбеге МВС:  ;
;  , и темпа бокового отклонения МВС от осевой линии ВПП, интегрирование величины Wz позволяет определить величину линейного бокового отклонения ±Δz, информация о которой по КЛС поступает в модуль 58 прогноза и анализа ЦБВС 13, в памяти которого хранится база данных (модуль 61) нормируемой величины ±Δzдоп=f(Lразб, Vприб).
, и темпа бокового отклонения МВС от осевой линии ВПП, интегрирование величины Wz позволяет определить величину линейного бокового отклонения ±Δz, информация о которой по КЛС поступает в модуль 58 прогноза и анализа ЦБВС 13, в памяти которого хранится база данных (модуль 61) нормируемой величины ±Δzдоп=f(Lразб, Vприб).
Для оценки темпа бокового отклонения МВС от осевой линии ВПП БПиНП 21 дополнительно выдает величину угловой скорости рысканья ωy, необходимую для оценки темпа бокового отклонения МВС от осевой линии на разбеге, которая поступает в блок 58 анализа и прогноза ЦБВС 13, где происходит сравнение текущей величины ωy с величиной допустимого значения  , и если после достижения МВС приборной скорости Vпр≥100 км/ч возникает условие
, и если после достижения МВС приборной скорости Vпр≥100 км/ч возникает условие  , то срабатывает управляющая команда на прекращение взлета.
, то срабатывает управляющая команда на прекращение взлета.
Для повышения точности определения темпа роста скорости на разбеге, зависящего от искусства и стиля пилотирования экипажем МВС, состояния ВПП, фактических МУ, продольных и поперечных составляющих путевой скорости Wy; ±Wz в вычислителе БПиНП 21 реализован алгоритм инерциально-спутникового фильтра, в котором производится комплексирование продольных и поперечных составляющих путевой скорости в связанной системе координат  ;
;  , полученных от приемного устройства БМРК СНС-ССС 19, при известном курсе ψ взлета. Определение географических координат текущего местоположения φ, λ осуществляется как в автономном режиме работы БПиНП 21, так и в комплесированном режиме работы по известным алгоритмам комплексирования. [см. Теория инерциальной навигации (корректируемые системы). В.Д. Андреев. Издательство «Наука». Главная редакция физико-математической литературы. М, 1967 г. 648 стр.]
, полученных от приемного устройства БМРК СНС-ССС 19, при известном курсе ψ взлета. Определение географических координат текущего местоположения φ, λ осуществляется как в автономном режиме работы БПиНП 21, так и в комплесированном режиме работы по известным алгоритмам комплексирования. [см. Теория инерциальной навигации (корректируемые системы). В.Д. Андреев. Издательство «Наука». Главная редакция физико-математической литературы. М, 1967 г. 648 стр.]
Причем в связи с особенностями применения МРК СНС-ССС 19, предназначенного не только для определения географических координат, текущей путевой скорости и текущего путевого угла, но и для высокоточного определения координат углового положения МВС γ, ψ, ϑ за счет использования антенного поста, состоящего из трех или четырех приемных антенн СНС, разнесенных вдоль фюзеляжа в продольном и поперечном направлениях, в вычислительном модуле БПиНП 21 реализуется алгоритм работы инерциально-спутникового фильтра, основанного на рассогласовании величин:
ΔW=WИ-WC; Δγ=γИ-γС;
Δϑ=ϑИ-ϑС; Δφ=φИ-φC;
Δλ=λИ-λC.
Реализация подобного алгоритма позволяет определять с высокой точностью быстроменяющиеся параметры пространственного положения и динамики разбега МВС.
С целью повышения точности определения пилотажных и навигационных параметров в вычислительном модуле БПиНП 21 реализуется алгоритмическая компенсация инструментальных погрешностей датчиков первичной информации на основе их математических моделей работы.
Тогда выходными характеристиками блока БПиНП 21 являются:
Wx; ±Wz - осредненные на интервале времени продольная и поперечная составляющие путевой скорости МВС на разбеге по ВПП в базовой или связанной системе координат;
 ;
;  - продольная и поперечная составляющие ускорения на разбеге МВС;
- продольная и поперечная составляющие ускорения на разбеге МВС;
ψи(ψм) - текущий истинный (магнитный) курс;
ωy - угловая скорость рыскания;
 - угловое ускорение рыскания;
- угловое ускорение рыскания;
γ, ϑ - текущие углы крена и тангажа на всех режимах полета;
 ,
,  - текущие угловые ускорения связанных осей судна по крену и тангажу;
- текущие угловые ускорения связанных осей судна по крену и тангажу;
WN; WE; W; ПУ; γ; φ - северная и восточная составляющие путевой скорости, путевая скорость, путевой угол, текущие координаты местоположения МВС в нормальной земной системе координат
Работа ЦБВС 13
Экипаж, контролируя на разбеге скорость разбега, ожидает момента достижения МВС скорости V1 и принимает дальнейшее решение на прекращение или продолжение взлета при наличии информации только о скорости V1, являющейся до сих пор главным критерием принятия решения на взлете. Однако, в случае разбега МВС с пониженным темпом достижение V1 может произойти слишком поздно за пределами Lразб>Lсбал и безопасное прекращение взлета не гарантируется, так как МВС может не хватить остатка длины ВПП+КПТ (концевая полоса торможения) для предотвращения выкатывания за пределы ВПП, а в случае продолжения взлета фактический градиент набора высоты ηфакт может оказаться ниже минимально допустимого, т.е. ηфакт<ηдоп, что может привести к столкновению МВС с препятствиями на воздушном участке взлетной дистанции. Ввиду отсутствия технических средств контроля темпа роста скорости к моменту достижения V1, технических средств контроля бокового отклонения от осевой линии, средств контроля предотвращения хвостовых ударов, экипаж контроль разбега ранее осуществлял чисто интуитивно. С целью улучшения ситуационной осведомленности экипажа на этапе «ВЗЛЕТ» разрабатываемая ЦБВС 13 выдает на индикаторы БИКВПП улучшенную параметрическую и сигнальную полетную информацию.
Структурная схема взаимодействия модулей расчета взлетных характеристик с входной информацией в реальном режиме времени и выходной информацией, отображаемой на индикаторах БИКВПП и выдачи экипажу управляющих команд, необходимых для безопасного взлета, показана на Фиг.4.
В соответствии с Фиг.4 ЦБВС 13 использует выходную информацию:
- от БМРК СНС-ССС 19 фактические величины параметров:  ;
;  ; ПУС; φС, λС; γС, ψС, ϑС;
; ПУС; φС, λС; γС, ψС, ϑС;
- от БПиНП 21 фактические величины параметров:  ;
;  ; ПУА; φA, λА; γА, ψА, ϑА или эти же параметры, полученные с высокой точностью при комплексированной работе с БМРК СНС-ССС 19 с индексами К:
; ПУА; φA, λА; γА, ψА, ϑА или эти же параметры, полученные с высокой точностью при комплексированной работе с БМРК СНС-ССС 19 с индексами К:  ;
;  ; ПУК; φК, λК; γК, ψК, ϑК;
; ПУК; φК, λК; γК, ψК, ϑК;
- от ИКВСиМП 20 фактические величины параметров НБАР; Р0; РН; Т0; ТН; VИ; VПР; VY; α; β;
- от DATIS 27 текущую метеорологическую информацию на аэродромах вылета, посадки, запасных, полученную по каналам ACARS: ННГО (высота нижней границы облаков); VВПП (инструментальная или метеорологическая видимость на ВПП); скорость U и метеорологическое направление ветра δ; технические характеристики покрытия ВПП (влажность, снег, обледенение), КСЦ (коэффициент сцепления);
- от ЦИВВ 22 фактический взлетный вес;
- от множества датчиков ОСС левого и правого бортов: фактические параметры силовых установок (nКВД; nКНД) - частоты вращения роторов компрессоров высокого и низкого давлений, показания датчиков ИКМ (индикаторов крутящих моментов для МВС с турбовинтовыми двигателями), текущее положение РУД, текущую конфигурацию механизации крыла - δзакр; δпредк и стабилизатора αстаб, текущее положение рулей (информация о стопорении/расстопорении), информацию о положении взлетно-посадочных устройств ВПУ - шасси выпущены/убраны, управление передним колесом установлено в положениях «РУЛЕНИЕ», «ВЗЛЕТ/ПОСАДКА», «ИСПРАВНО/НЕИСПРАВНО», положения системы торможения - «СТОЯНОЧНЫЙ ТОРМОЗ ВКЛЮЧЕН/ОТКЛЮЧЕН», наличие/отсутствие давления в системах торможения, а также дискретных сигналов об отказах СУ и систем МВС: САУ, ИКВСП, БИНС, РТС, СЭС, гидравлической системы, топливной системы и других систем, не позволяющих выполнить полет, в соответствии с перечнем отказов, с которыми разрешен взлет, изложенными в РЛЭ ВС. Прием информации от систем МВС и СУ, обработка полученной информации в цифровой вид, формирование информации о текущих отказах, вывод на экран БИКВПП информации о текущих отказах и формирование управляющих команд ЦБВС 13 осуществляется с помощью блоков сбора, преобразования и обработки аналоговых и дискретных сигналов БПАДС (на схеме не показано), а также использования кодовых линий связи, КЛС, МКИО 18, информационных сетей 16, сетевой информационно-управляющей системы 12, которые выполняют прием аналоговых и дискретных сигналов, обработку и передачу цифровой информации через каналы информационного обмена - концентраторов сигналов - БКС 17 левого и правого бортов, обеспечивают подключение к соответствующим радиальным линиям связи для обеспечения взаимодействия со следующими системами МВС: управления механизацией крыла, сигнализации дверей и люков, системой штурвального управления, торможения колес, управления рулежным устройством и шасси, гидросистемой, системой электроснабжения, противообледенительной системой, противопожарной системой, и др. Блоки БКС 17 левого и правого бортов обеспечивают взаимодействие с системами ОСС по радиальным линиям связи средствами приема и передачи двунаправленных кодовых сигналов вида ГОСТ 18977-79 (РТМ 1495-75 с изм. 3) или CAN-Aerospace. ЦБВС 13 левого и правого бортов взаимодействуют с системными шинами ИКБО МВС, информационной сетью 16 и сетевой информационно-управляющей системой 12, которые в свою очередь обеспечивают прием, обработку и передачу цифровой информации через каналы информационного обмена сигналов, а также обеспечивают подключение к соответствующим линиям связи для обеспечения взаимодействия интегрированной системы визуализации полета (БИКВПП+БИКВЗКП), системными блоками БИСИП МВС и ИКБО МВС.
ЦБВС 13 левого и правого борта взаимодействуют через устройство ввода/вывода СЗМ 14, а также с исполнительными устройствами БСАС 15.
ЦБВС 13 левого и правого борта традиционно содержат рабочие программы, программу рабочей конфигурации, специализированные базы данных, определяющие конфигурацию ИКБО (БРЭО) и в некоторых случаях поддерживающие работу блоков при кратковременном отключении питания бортовой электросети, базы данных - цифровые данные, расположенные в удобном порядке для их хранения и обмена внутри операционной системы, модули алгоритмов первичной обработки и преобразования, комплексной обработки информации, управления, обмена и выдачи информации, систем отображения информации, контроля и проверок, диспетчеризации и др.
В связи с расширением функциональных возможностей по информационной поддержке экипажа на этапе «ВЗЛЕТ» ЦБВС 13 левого и правого борта дополнительно содержат модули: 52 - параметров динамики взлета; 53 высотно-скоростных и метеорологических параметров; 54 - летно-технических характеристик МВС, 55 - аэродинамики, 56 - тяги силовых установок; 57 базы данных: мировой базы данных аэродромов, аэронавигационной базы данных, например: аэронавигационную базу данных корпорации Jeppsen (наименование аэродромов, координаты торцов ВПП или контрольной точки аэродрома (КТА), технические характеристики ВПП, схемы МС, РД, ВПП, схемы выхода, подхода, захода на посадку, базы данных РТС связи и навигации и др.); взлетной конфигурации, мировой улучшенной базы данных рельефа местности, например: фирм Honeywell, Garmin; базу данных летных эксплуатационных ограничений и данных перечня допустимых отказов и неисправностей, с которыми разрешается взлет и завершение рейса до аэропорта базирования, данных РЛЭ по действиям экипажа при отказах двигателей и систем МВС, данных по действиям экипажа в особых случаях полета; модуль 58 анализа и принятия решений, модули 59, 60, 61, 62, 63 базы данных: базы данных нормируемых параметров для этапа «ВЗЛЕТ»: V1; VПСТ; VОТР; V2; ΔWдоп; ΔVдоп;  ;
;  ;
;  ;
;  ; РДРmin;
; РДРmin;  ;
;  ; нормируемых параметров градиентов набора высоты - ηПОТР; ηЧИСТ на воздушном участке взлетной дистанции, допустимых и критических углов атаки и скольжения: αдоп; αкр; βдоп; βкр в зависимости от величин приборной скорости, конфигурации механизации; продольного и бокового ускорений -
; нормируемых параметров градиентов набора высоты - ηПОТР; ηЧИСТ на воздушном участке взлетной дистанции, допустимых и критических углов атаки и скольжения: αдоп; αкр; βдоп; βкр в зависимости от величин приборной скорости, конфигурации механизации; продольного и бокового ускорений -  ;
;  ; потребной навигационной точности при разбеге МВС по ВПП (требования RNP) - максимально допустимое отклонение от оси ВПП в зависимости от пройденного расстояния с момента старта и текущей скорости разбега - ±Δzдоп; точность определения местоположения МВС на ВПП -
; потребной навигационной точности при разбеге МВС по ВПП (требования RNP) - максимально допустимое отклонение от оси ВПП в зависимости от пройденного расстояния с момента старта и текущей скорости разбега - ±Δzдоп; точность определения местоположения МВС на ВПП -  ; величина рассогласования между расчетной (прогнозируемой) воздушной (путевой) и фактической скоростью разбега (воздушной и путевой); на исполнительном старте допустимое отклонение от осевой линии ВПП - ±Δzдоп, максимально допустимая дистанция от торца ВПП в направлении взлета - ΔSдоп. При этом модули 59, 60, 61, 62, 63 разделяются по функциональным признакам, а именно: модуль 59 анализа технического состояния МВС и прогнозирования развития возмущений с оценкой возможностей локализации отказов систем БИСИП, ИКБО; модуль 60 формирования летных эксплуатационных ограничений; модуль 61 анализа внешних воздействующих факторов окружающей среды; модуль 62 принятия решений, который использует методы аналитического и логического анализа, а также модуль 63, использующий данные экспертных оценок, модуль определения максимально допустимого взлетного/ посадочного веса 64.
; величина рассогласования между расчетной (прогнозируемой) воздушной (путевой) и фактической скоростью разбега (воздушной и путевой); на исполнительном старте допустимое отклонение от осевой линии ВПП - ±Δzдоп, максимально допустимая дистанция от торца ВПП в направлении взлета - ΔSдоп. При этом модули 59, 60, 61, 62, 63 разделяются по функциональным признакам, а именно: модуль 59 анализа технического состояния МВС и прогнозирования развития возмущений с оценкой возможностей локализации отказов систем БИСИП, ИКБО; модуль 60 формирования летных эксплуатационных ограничений; модуль 61 анализа внешних воздействующих факторов окружающей среды; модуль 62 принятия решений, который использует методы аналитического и логического анализа, а также модуль 63, использующий данные экспертных оценок, модуль определения максимально допустимого взлетного/ посадочного веса 64.
По предварительным оценкам из условий невыкатывания МВС за пределы ВПП с вероятностью Р=10-9 среднеквадратические отклонения определения величин Δz, LРАЗБ, WX не должны превышать 5÷6 м, 20 м; 3÷4 км/ч соответственно.
Модуль 58 ЦБВС 13 дополнительно содержит базу знаний 63 экспертно-советующей системы для принятия решений на продолжение или прекращение взлета как при несигнализируемых отказах блоков ИКБО, так и на основе анализа опыта эксплуатации данного типа МВС и состояния безопасности полетов на этапе «ВЗЛЕТ» других типов ВС, по действиям экипажа на разбеге после достижения скорости V1 при возникновении особых случаев в полете.
Модуль параметров динамики взлета 52 определяет фактические параметры разбега: величину продольного и поперечного ускорений ax, az;, угловую скорость рыскания ω0; курс взлета ψ; фактическую величину бокового отклонения от оси ВПП ±Δz, пройденное расстояние с момента старта или от начала торца ВПП в направлении взлета LРАЗБ, фактический градиент набора высоты η; продольную и поперечную составляющие путевой скорости Wx, ±Wz, а также рассчитывает прогнозируемые величины: потребную длину сбалансированной дистанции разбега LСБАЛ; потребную длину разбега LРАЗБ.ПОТР; потребную длину прерванного взлета LПР.ПОТР; потребную длину взлетной дистанции LВЗЛ.ПОТР в соответствии с алгоритмами, приведенными в РЛЭ данного типа ВС для ожидаемых условий взлета, а также командные (директорные) углы тангажа на подъем передней стойки шасси, отрыв и безопасный набор высоты.
Для этих целей на вход модуля 52 поступает высокоточная информация о текущем местоположении МВС на ВПП от БМРК СНС-ССС 19 и от БПиНП 21, как в автономном, так и в комплексированном режиме работы БПиНП 21, а именно  ;
;  ПУК; φК; λК; γК; ψК; ϑК, причем северная и восточная составляющая путевой скорости в модуле 52 преобразовываются в продольную и поперечную составляющую путевой скорости в базовой системе координат при известных углах γ, ψ, ϑ с использованием матрицы направляющих косинусов. Однако для упрощения расчетов ввиду малости углов γ, ϑ на разбеге преобразование осуществляется при известном курсе взлета путем простых тригонометрических преобразований на плоскости. На вход модуля 52 также поступает информация о фактическом взлетном весе, конфигурации механизации, тяги силовых установок, а также технических характеристик ВПП и параметров фактических метеорологических условий взлета. Для повышения точности в определении параметров разбега, а именно местоположения МВС на ВПП и величины темпа роста скорости разбега используется алгоритм осреднения продольного ускорения на малом интервале времени, начиная от начала разбега и до достижения МВС скорости V1, который связан с теоремой о среднем значении функции на интервале времени:
ПУК; φК; λК; γК; ψК; ϑК, причем северная и восточная составляющая путевой скорости в модуле 52 преобразовываются в продольную и поперечную составляющую путевой скорости в базовой системе координат при известных углах γ, ψ, ϑ с использованием матрицы направляющих косинусов. Однако для упрощения расчетов ввиду малости углов γ, ϑ на разбеге преобразование осуществляется при известном курсе взлета путем простых тригонометрических преобразований на плоскости. На вход модуля 52 также поступает информация о фактическом взлетном весе, конфигурации механизации, тяги силовых установок, а также технических характеристик ВПП и параметров фактических метеорологических условий взлета. Для повышения точности в определении параметров разбега, а именно местоположения МВС на ВПП и величины темпа роста скорости разбега используется алгоритм осреднения продольного ускорения на малом интервале времени, начиная от начала разбега и до достижения МВС скорости V1, который связан с теоремой о среднем значении функции на интервале времени:
 , т.е. может производиться простым интегрированием показаний датчиков ускорения величин ax; az или путевой скорости Wy; Wz для последующего анализа их с нормируемыми величинами темпа роста скорости или пройденного расстояния и бокового уклонения от осевой линии с момента начала разбега.
, т.е. может производиться простым интегрированием показаний датчиков ускорения величин ax; az или путевой скорости Wy; Wz для последующего анализа их с нормируемыми величинами темпа роста скорости или пройденного расстояния и бокового уклонения от осевой линии с момента начала разбега.
Где Δt=1 с - интервал времени, на котором производится не менее 10 выборок показаний датчиков ускорений;
T - время разбега МВС с момента старта до достижения им скорости V1 или Vотр.
Для повышения точности определения величин продольного ускорения и соответственно фактических величин взлетных скоростей время осреднения может быть уменьшено и определяться на интервале Vразб=100 км/ч и до достижения МВС скорости V1, Vотр.
Точность определения координат текущего местоположения МВС на ВПП, а также определения скоростей Wx, Wz и ПУ зависит от алгоритмов работы блока БПиНП 21, в котором может быть реализован известный алгоритм автономной работы БИНС, а также алгоритм комплексирования с применением программного математического аппарата оптимального (адаптивного) фильтра Калмана, например: в соответствии с книгами Синицын И.Н. Фильтры Калмана и Пугачева: учебное пособие. - М. Университетская книга. Логос. 2006 - 640 с: ил. или Ориентация и навигация подвижных объектов: современные информационные технологии. Под ред. Б.С. Алешина, К.К. Веремеенко, А.И. Черноморского - М. Физ-мат лит., 2006 - 424 с.]. Однако, алгоритм работы БПиНП 21 несколько отличается от алгоритма БИНС и был приведен выше.
Текущие величины, вырабатываемые модулем 52 ЦБВС 13 непрерывно поступают на модуль 58 анализа и принятия решения, который в свою очередь содержит базу данных нормируемых величин параметров динамики разбега, приведенных выше. Модуль 58 анализа и принятия решений сравнивает фактические текущие величины темпа роста скорости или путевую и приборную скорости в зависимости от пройденного расстояния по ВПП с момента старта или в зависимости от времени с момента начала разбега, бокового ускорения (бокового отклонения), угловой скорости рыскания, путевого угла разбега на участке разбега МВС до достижения им скорости Vотр, если при этом создаются условия, когда:
 ;
;  ;
;  или
или  , где
, где  ;
;
 ;
;  , модуль 58, используя базы данных 60÷63, выдает команду БСАС 15 для срабатывания речевой и визуальной управляющей команды «ВЗЛЕТ ПРОДОЛЖИТЬ», а если
, модуль 58, используя базы данных 60÷63, выдает команду БСАС 15 для срабатывания речевой и визуальной управляющей команды «ВЗЛЕТ ПРОДОЛЖИТЬ», а если
 ;
;  ;
;  или
или  - «ВЗЛЕТ ПРЕКРАТИТЬ».
- «ВЗЛЕТ ПРЕКРАТИТЬ».
Причем величина рассогласования между расчетными скоростями разбега и фактической скоростью разбега (воздушной и путевой) на участке разбега до достижения МВС скорости V1 и ее допустимые значения определяются различными способами. Один из способов определения величин  и
и  показан ниже.
показан ниже.
А на воздушном участке взлетной дистанции сравнивается текущая величина градиента набора с их допустимыми (прогнозируемыми) значениями, например, если возникают условия полета, когда ηфакт>ηчист, сигнальная информация не вырабатывается, а если ηфакт≤ηчист срабатывает аварийно-предупреждающая сигнализация, выполненная со статическим и динамическим упреждением, предназначенная для предотвращения столкновения МВС с подстилающей поверхностью и/или искусственными препятствиями на воздушном участке взлетной дистанции. Величина ηфакт определяется как  , где
, где
S - пройденное расстояние МВС от торца ВПП, причем фактический градиент набора может быть определен и для криволинейной траектории набора высоты при наличии на МВС аппаратуры ММР спутниковой системы захода на посадку и контроля взлета на основе анализа текущих параметров разбега и воздушного участка набора высоты.
Модуль 58 выдает управляющие команды на продолжение/прекращение взлета, увеличение/уменьшение угла тангажа на воздушном участке взлетной дистанции, а также директорную команду по углу тангажа на подъем передней стойки, отрыв и безопасный набор высоты. При этом угол тангажа определяется как: ϑ=Θфакт+αфакт,
где Θфакт угол наклона ВПП к плоскости истинного горизонта при разбеге МВС по ВПП и
 угол наклона траектории к плоскости истинного горизонта на воздушном участке взлетной дистанции;
угол наклона траектории к плоскости истинного горизонта на воздушном участке взлетной дистанции;
αфакт - фактический угол атаки.
Если фактические величины углов тангажа составляют ϑПСТ; ϑОТР, ϑ2≥ϑдоп, где ϑдоп - конструктивный параметр МВС, предотвращающий хвостовой удар фюзеляжа о ВПП, модуль 58 выдает с динамическим и статическим упреждением управляющую команду «ТАНГАЖ УМЕНЬШИТЬ». Таким образом, модули 52, 58 ЦБВС 13 вырабатывают для отображения на индикаторах БИКВПП параметры динамики разбега, контролирующие темп роста скорости, боковое уклонение МВС от оси ВПП, пройденное расстояние с момента старта, рассчитывают величину сбалансированной дистанции разбега, директорные (командные) углы тангажа на подъем передней стойки, отрыв, доразгона МВС до скоростей V2, V3, V4, и управляющие команды на продолжение/прекращение взлета в зависимости от соответствия/несоответствия параметров динамики разбега, приведенных выше, требованиям РЛЭ по обеспечению безопасного взлета. Эти же модули на воздушном участке взлетной дистанции контролируют фактические градиенты набора высоты и вырабатывают управляющие команды на уменьшение/увеличение угла тангажа, предназначенные для предотвращения столкновения с подстилающей поверхностью и искусственными препятствиями на ней и сваливания из-за превышения углов атаки допустимых величин в зависимости от конфигурации механизации МВС на воздушном участке взлетной дистанции.
Работа модуля 53 высотно-скоростных и метеорологических параметров
Данный модуль предназначен для определения взлетных скоростей, величины темпа роста скорости с учетом реальных метеорологических условий взлета, а также выдачи экипажу на экраны БИКВПП информации о расчетных (прогнозируемых) величинах взлетных скоростей и выдачи метеорологической информации P0; t0; tH; Uраз; Uв; Uп; Uб. На вход модуля 53 от ИКВСиМП 20 в реальном режиме времени поступают: Нбар; Р0; РН; t0; tH; α; β, а от блока БПиНП 21 - WN, WE, γ, ψ, ϑ. Модуль 53 взаимодействует с модулем 58 по внутренней системной шине 66 ЦБВС 13, в базе данных которого хранятся зависимости: Uв; Uп; Uб=f (КСЦ и технические характеристики покрытия ВПП) для данного типа ВС. Модуль 58 решает логическую задачу, и если в момент занятия исполнительного старта возникают условия, когда:

то данный модуль вырабатывает управляющую команду «К ВЗЛЕТУ НЕ ГОТОВ», а при разбеге МВС по ВПП, в случае внезапного выполнения условия (1) вырабатывает управляющую команду «ВЗЛЕТ ПРЕКРАТИТЬ», которая отображается в красном проблесковом режиме на индикаторах БИКВПП и дублируется речевой информацией аналогичного содержания исполнительными устройствами БСАС 15.
Работа модуля 54 летно-технических характеристик МВС
Данный модуль предназначен для расчета прогнозируемых параметров динамики движения МВС с учетом его аэродинамических особенностей, а именно: различных взлетных конфигураций механизации крыла (предкрылков, закрылков), стабилизатора, фактического взлетного веса, фактических метеорологических условий на аэродроме вылета, фактического технического состояния ВПП (РДР, РДПВ, РДВ, КПТ, Ксц и с учетом вида покрытия ВПП), технического состояния МВС (перечень неисправностей, с которыми разрешен взлет), тяги двигателей, опасных факторов окружающей среды: наличие условий для обледенения, ливневых осадков, сдвига ветра. Поскольку величина продольного ускорения на разбеге является функцией тяги силовых установок, полетного веса, приборной скорости, аэродинамических коэффициентов, коэффициента трения в соответствии с выражением для ускорения:
 ,
,
где  - ускорение на разбеге;
- ускорение на разбеге;
g - ускорение силы тяжести;
Р - суммарная тяга двигателей;
f - коэффициент силы трения пневматиков шасси о ВПП;
cxα - коэффициент лобового сопротивления, зависящий от угла атаки;
cyα - коэффициент подъемной силы;
ρ - плотность воздуха;
V - приборная скорость;
S - суммарная площадь крыла;
m - масса МВС,
то для определения расчетных параметров динамики разбега, а именно: ускорения разбега , прогнозируемых взлетных скоростей V1; Vп.ст; Vотр; V2; V3; V4, a также для определения длины разбега Lразб и времени разбега (продолжительность разбега) tразб используются известные алгоритмы, изложенные в РЛЭ конкретного типа МВС или аналитические выражения, приведенные в источниках информации Котик М.Г. Динамика взлета и посадки самолетов. М.: Машиностроение, 1984. 256 с. Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета. Динамика продольного и бокового движения. М.: Машиностроение, 1978. 349 с.]. Ввиду их громоздкости формулы не приводятся.
Определение и расчет допустимой величины рассогласования, прогнозируемой и фактической воздушной и путевой скоростей разбега
Знания законов нарастания скорости в процессе разбега по ВПП, а именно, аналитических зависимостей для определения скоростей V1; Vпст; Vотр; V1 позволяют спрогнозировать величины скоростей в зависимости от длины разбега и продолжительности разбега, а модули 52, 53, 54 ЦБВС 13 определяют их фактические величины в реальном режиме времени и дополнительно строят зависимости  ;
;  , а также LСБАЛ. В этом случае появляется рассогласование потребных и фактических скоростей разбега
, а также LСБАЛ. В этом случае появляется рассогласование потребных и фактических скоростей разбега  ;
;  , которое не обязательно опасно даже при отрицательном его значении на всем протяжении разбега МВС, но эта величина должна стремиться к нулю или сменить свой знак на положительный, по крайней мере, не позже, чем за 3 с до достижения МВС скорости V1. Вероятность проявления таких рассогласований весьма велика и может достигнуть 95% случаев взлетов МВС. Оно сильно зависит от технического состояния МВС и неблагоприятного влияния ВВФ (факторы состояния ВПП и окружающей среды, сверхнормативная загрузка МВС, ошибки экипажа на разбеге), отсюда следует необходимость построения закона ограничения таких отклонений. В данной заявке предлагается использовать способа построения ограничений величин ΔWдоп; ΔVдоп, а разработчику МВС отнормировать эти величины независимо от ВВФ, по крайне мере, их максимально допустимые величины на середине участка разбега и в момент принятия решения на продолжение/прекращение взлета. Для этих целей используется алгоритм определения величины рассогласования скоростей, приведенный на Фиг.6. На ней показаны графики изменения Vрасч=f(Lразб) (синяя сплошная), и теоретически возможные развития Vфакт (тонкие прерывистые), толстая прерывистая - минимально допустимое развитие Vфакт. Теория этого способа заключается в анализе всех теоретически допустимых кривых по законам увеличения скорости разбега Vразб=f(Lразб). Например, могут быть использованы формульные зависимости для определения скоростей V1; Vп.ст; Vотр; V2, приведенных в источниках информации Котик М.Г. Динамика взлета и посадки самолетов. М.: Машиностроение, 1984. 256 с.; Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета. Динамика продольного и бокового движения. М.: Машиностроение, 1978. 349 с., или использованы алгоритмы определения этих же скоростей, изложенные в РЛЭ данного типа МВС для множества ВВФ и построено семейство кривых Vpaзб=f(Lpaзб).
, которое не обязательно опасно даже при отрицательном его значении на всем протяжении разбега МВС, но эта величина должна стремиться к нулю или сменить свой знак на положительный, по крайней мере, не позже, чем за 3 с до достижения МВС скорости V1. Вероятность проявления таких рассогласований весьма велика и может достигнуть 95% случаев взлетов МВС. Оно сильно зависит от технического состояния МВС и неблагоприятного влияния ВВФ (факторы состояния ВПП и окружающей среды, сверхнормативная загрузка МВС, ошибки экипажа на разбеге), отсюда следует необходимость построения закона ограничения таких отклонений. В данной заявке предлагается использовать способа построения ограничений величин ΔWдоп; ΔVдоп, а разработчику МВС отнормировать эти величины независимо от ВВФ, по крайне мере, их максимально допустимые величины на середине участка разбега и в момент принятия решения на продолжение/прекращение взлета. Для этих целей используется алгоритм определения величины рассогласования скоростей, приведенный на Фиг.6. На ней показаны графики изменения Vрасч=f(Lразб) (синяя сплошная), и теоретически возможные развития Vфакт (тонкие прерывистые), толстая прерывистая - минимально допустимое развитие Vфакт. Теория этого способа заключается в анализе всех теоретически допустимых кривых по законам увеличения скорости разбега Vразб=f(Lразб). Например, могут быть использованы формульные зависимости для определения скоростей V1; Vп.ст; Vотр; V2, приведенных в источниках информации Котик М.Г. Динамика взлета и посадки самолетов. М.: Машиностроение, 1984. 256 с.; Бюшгенс Г.С., Студнев Р.В. Аэродинамика самолета. Динамика продольного и бокового движения. М.: Машиностроение, 1978. 349 с., или использованы алгоритмы определения этих же скоростей, изложенные в РЛЭ данного типа МВС для множества ВВФ и построено семейство кривых Vpaзб=f(Lpaзб).
Для построения функциональной зависимости Vpaзб=f(Lразб) используется следующая зависимость для расчета длины разбега до достижения скорости подъема передней стойки:

Или, заменив величину ускорения jx1 на выражение:

получим:  , a также зависимость воздушной скорости от длины разбега на участке от момента старта до достижения скорости Vп.см:
, a также зависимость воздушной скорости от длины разбега на участке от момента старта до достижения скорости Vп.см:

На втором участке разбега МВС от Vп.ст до Vотр прогнозируемая скорость определяется как:


Данные выражения позволяют построить зависимость прогнозируемой воздушной скорости разбега от дистанции разбега (длины разбега с момента старта). Аналогично могут быть построены зависимости прогнозируемой путевой скорости разбега от дистанции разбега. Но в этом случае возникает необходимость учета попутной и встречной составляющих скорости ветра. Таким образом, создаются предпосылки для определения величины рассогласования воздушных и путевых скоростей на всем участке разбега от его начала и до скорости отрыва, которые являются основанием для принятия решения на продолжение или прекращение взлета. Анализ позволяет выбрать предельную кривую (толстая прерывистая линия на Фиг.6).
Все рассогласования, заключенные в эти границы, допускаются в летной эксплуатации, другие отклонения ниже толстой прерывистой линии являются неприемлемыми в летной эксплуатации. Кривые выше синей сплошной линии являются весьма привлекательными. Однако на практике требуется ограничение теоретически обоснованных допусков величин ΔW и ΔV, т.е. их нормирование с учетом коэффициентов безопасности.
В соответствии с вышеизложенными материалами для обеспечения функционирования режима контроля разбега необходимо иметь множество данных, а именно: технические, высотно-скоростные, навигационные характеристики МВС, фактические метеорологические параметры окружающей среды, фактические технические характеристики аэродрома.
Для решения указанных задач на вход модуля 54 ЦБВС 13 поступает информация: с модуля 55 аэродинамики - аэродинамические коэффициенты Сxa, Cya, зависящие в свою очередь от текущих углов атаки (приборной скорости), текущего положения механизации крыла (закрылков, предкрылков); с модуля 56 тяги СУ - информация о тяге силовых установок по косвенным параметрам - частоты вращения валов компрессоров высокого и низкого давлений или информации от индикаторов крутящего момента - ИКМ для турбовинтовых силовых установок; с модуля 57 базы данных аэродрома вылета - технические характеристики аэродрома вылета, а именно: величины РДР, РДПВ, РДВ, КСЦ, чистый градиент набора высоты ηчис;, с модуля 53 - параметры окружающей среды и фактические продольные и попутные составляющие скорости ветра, а также фактическая воздушная скорость разбега, а от блоков БП и НП 21 и БМРК СНС-ССС 19 - информация о фактических составляющих путевой скорости продольной Wx и поперечной Wz. Модуль 54 через системную шину 66 ЦБВС 13 взаимодействует с модулем 58, в котором хранятся базы данных ΔVдоп; ΔWдоп.
При этом модуль 54 строит прогнозируемые зависимости: Vразб=f(tразб) или Vразб=f(Lразб)Vразб=f(LОСТ ДО конца ВВП), в пересечении которых определяются величины V1 и Lсбал, а также  или
или  после достижения МВС скорости 100 км/ч, или строит зависимости:
после достижения МВС скорости 100 км/ч, или строит зависимости:
WРАЗБ=f(tразб) или Wразб=f(Lразб), Lпрер=f(Vразб), Lпрод=f(Vразб), пересечение которых также определяют величину V1 и Lсбал. Величина V1 может быть также получена с помощью алгоритмов использования номограмм, приведенных в РЛЭ ВС.
Модули 52, 53, 54 по системной шине 66 ЦБВС 13 взаимодействует с модулем 58, в котором хранится база данных зависимостей величин  ;
;  , базы данных нормируемых величин
, базы данных нормируемых величин  или
или  , таблица зависимостей ±Δzдоп=f(SПРОЙД или SОСТ до конца ВПП) или ±zдоп=f(Vразб), а также могут храниться отнормированные величины
, таблица зависимостей ±Δzдоп=f(SПРОЙД или SОСТ до конца ВПП) или ±zдоп=f(Vразб), а также могут храниться отнормированные величины  или величина
или величина  для данного типа МВС.
для данного типа МВС.
Модуль 55 аэродинамики рассчитывает аэродинамические коэффициенты CX, CY, зависящие в свою очередь от текущих углов атаки или приборной скорости. CX, CY=f[α(V)] и текущего положения механизации крыла, информация о которых поступает на вход модуля 55 аэродинамики от ОСС, а информация о текущих приборной скорости V и углах атаки α поступает от модуля 53 по системной шине 66 ЦБВС 13.
Модуль 56 тяги силовых установок определяет тягу двигателей для фактических атмосферных условий аэродрома вылета. Тяга двигателя рассчитывается в зависимости от различных режимов, устанавливаемых рычагом управления двигателями РУД (чрезвычайный, взлетный, номинальный, крейсерские режимы, полетный малый газ, земной малый газ). Модуль тяги воспринимает информацию Р0; t0; tH; Vприб; Uв; Uп; Uб от модуля 53 ЦБВС 13, а информацию о положении РУД двигателей от ОСС левого и правого бортов и выдает в модуль 54 ЦБВС 13 информацию о тягах СУ в виде косвенных параметров частоты вращения валов компрессоров высокого и низкого давлений для турбореактивных двигателей и в виде величины давления в каналах измерения крутящего момента для турбовинтовых двигателей - ИКМ. Модуль 56 взаимодействует с модулем 58, где хранится база данных тяг силовых установок, и в случае недостаточности (пониженной тяге) одной или нескольких силовых установок несоответствующему положению РУД-ов модуль 58 на этапе разбега МВС до скорости V1 вырабатывает управляющую команду: «ТЯГА СУ МАЛА», «ПОЛОЖЕНИЕ РУД ПРОВЕРЬ», и если после установки РУД во взлетное положение тяги СУ не восстанавливаются, вырабатывается управляющая команда - «ВЗЛЕТ ПРЕКРАТИТЬ».
Модуль базы данных 57 содержит: улучшенную мировую базу данных аэродромов и их технические характеристики, приведенные в таблице 1, SVS - синтезированные 3D схемы МС, РД, ВПП, схемы выхода, подхода и захода на посадку, например, фирмы Jeppsen, a также улучшенную мировую базу данных рельефа подстилающей поверхности EGPWS фирмы Collins или фирмы Garmin. Улучшенная мировая база данных рельефа подстилающей поверхности (EGPWS), отличается тем, что в ней заранее рассчитаны величины безопасных высот (Нбез) для визуальных правил полетов (ПВП) и правил полетов по приборам (ППП) с сигнализацией достижения MB С Нбез, выполненной с упреждением в зависимости от характера рельефа местности (равнинная, холмистая, горная и горная с абсолютной высотой гор более 1000 м; 2000 м) с оценкой рельефа местности впереди МВС в радиусе не менее 40 морских миль и в пределах установленных коридоров воздушных трасс при полетах по заданным маршрутам, в зонах взлета и посадки (схемы подхода, снижения, захода на посадку и выхода набора высоты). При выполнении полетов вне трасс и воздушных коридоров, маловысотных полетов оценка рельефа подстилающей поверхности осуществляется в радиусе 40 морских миль от местоположения МВС.
При этом перед каждым вылетом от УВВ 65 со съемного загрузочного модуля СЗМ 14 или УВВ сенсорных экранов БИКВПП вручную в вычислитель ЦБВС 13 вводятся фактические, технические характеристики аэродромов вылета, предупреждения NOTAM, SNOTAM. При наличии на аэродроме вылета системы ACARS, а на борту МВС приемных блоков ACARS, ввод информации о фактических параметрах ВПП, фактической погоде, данные по коммерческой загрузке МВС вводятся автоматически наземными службами аэропорта вылета после их тщательной сверки.
Модуль 58 анализа и принятия решений, предназначен для формирования информационных признаков эксплуатационных режимов полета и возникновения опасной ситуации. Здесь выделяются признаки идентификации распознавания контролируемых параметров полета и действующих возмущений по критерию допустимых в летной эксплуатации значений. Среди признаков идентификации: состояние МВС, параметры СУ и систем ВС - органов управления, положения механизации, систем торможения, электроснабжения, гидравлики, топливной, противопожарной, противообледенительной, кондиционирования и др., а также действующих возмущений ВВФ по критериям соответствия/несоответствия требованиям РЛЭ ВС. Выходные данные модуля 58 по системной шине 66 и сетевой информационно-управляющей системе 12 поступают на входы индикаторов БИКВПП и на вход БСАС 15 и используются экипажем и САУ при штурвальном управлении на разбеге и автоматическом управлении МВС на других этапах полета. В этом модуле оценивается вероятность появления опасных ситуаций, связанных с отказами СУ и их недостаточной тяги для безопасного взлета и отказами систем МВС, а также с пожаром при разбеге по ВПП до достижения МВС скорости V1, оценивается возможность возникновения внештатной ситуации, опасной для продолжения взлета. Выходные данные систем поступают на первый вход модуля 58 анализа и принятия решений, на второй вход которого поступает информация с модулей 57 базы данных аэродромов. Модуль 58 содержит блоки базы данных 59, 60, 61, 62, 63, в которых расположены в порядке, удобном для применения, базы данных: СУ, систем МВС, пилотажных, навигационных параметров и нормируемых параметров динамики разбега МВС по ВПП, определяющих безопасность текущего режима полета МВС в зависимости от их допустимых значений в эксплуатации. Здесь же хранятся базы данных допустимых значений ВВФ, базы данных летных ограничений МВС, базы данных по эксплуатации МВС в нормальных условиях и в особых случаях полета. Модуль 58 содержит блок УК 62 формирования управляющих команд, в котором используются методы аналитического и логического анализа. При этом оценивается возможность безопасного продолжения/прекращения взлета не только по параметрам V1 с оценкой возможности достижения на дистанции разбега не далее, чем LСБАЛ, но и по нормируемым параметрам для взлета: СУ, систем МВС (перечнем неисправностей, с которыми разрешается взлет), пилотажным, навигационным параметрам, параметрам ВВФ, техническим характеристикам аэродрома, а именно: базам данных режимов в работы силовых установок в зависимости от положения РУДов, минимальной тяги двигателей, с которыми возможен безопасный взлет, базам данных по эксплуатации систем при отказах с рекомендациями их локализации или резервирования, параметрам динамики разбега, а именно: боковому отклонению от осевой линии на разбеге, темпу роста воздушной скорости или нормированной величины путевой скорости разбега в зависимости от пройденного расстояния (времени) с точки старта; величине рассогласования расчетной и фактической скоростей разбега в зависимости от дистанции разбега или времени разбега; оценке возможности достижения скорости V2 в пределах РДР; нормированием величин углов тангажа на подъем передней стойки, отрыв и доразгона до скоростей V2, V3, V4, нормированием параметров на воздушном участке взлетной дистанции (чистого градиента набора высоты, допустимых углов атаки и скольжения, в том числе в зависимости от различной взлетной конфигурации механизации крыла); параметрам продольной и боковой скорости ветра в зависимости от технического состояния ВПП. Поскольку на процесс взлета накладывается большое число ограничений по пилотажным параметрам, приведенным в таблице 1, взаимосвязанных между собой как аэродинамическими особенностями МВС, состоянием ВПП, и окружающей среды, эти ограничения определяют безопасную область эксплуатации МВС на взлете. В этом случае зависимость ограничений пилотажных параметров от внешних условий, состояния ВПП и технического состояния МВС, конструктивных и аэродинамических характеристик можно оценить системой уравнений вида:
αдоп=f1[Vпр, m, Н, n (nx, ny, nz), ωz, β, √i … Ux, Uz];
γдоп=f2[Vпр, m, H, n (nx, ny, nz), ωx, √I … Ux, Uz];
 ;
;

 .
.
ϑдоп=f5(Vпр, САХ, m, ωz, √I …);
ηдоп=f6(Vпр, m, HПРЕП, HИСКУС.ПРЕП, PСУ, tНВ, схемы SID, …, Ux, Uy Uz);
Δzдоп=f7(Vpaзб, m, LВПП, SВПП, РДР, РДПВ, ax, ωy, …, Ux, Uz);

 ;
;
Vдоп=f9(VСВАЛ, LПРЕР, LСБАЛ, Vδ max, αдоп);
 ;
;
где αдоп, γдоп, ϑдоп,  , ηдоп, Δzдоп,
, ηдоп, Δzдоп,  , Vдоп,
, Vдоп,  , ΔПУразб - допустимые значения контролируемых параметров при летной эксплуатации данного типа МВС;
, ΔПУразб - допустимые значения контролируемых параметров при летной эксплуатации данного типа МВС;
m - масса МВС;
√i - конструктивный параметр, в том числе учитывающий различные сочетания положения механизации крыла, положения РУД СУ.
Информация о границах безопасной области эксплуатации МВС на этапе «ВЗЛЕТ», а также об изменении уровня безопасности полетов в возникших нештатных ситуациях из-за ошибок экипажа, отказов техники и неблагоприятного воздействия ВВФ, хранится в виде таблиц или в виде графических зависимостей, приведенных выше уравнений, которые необходимы для принятия решения по предотвращению АП на этапе «ВЗЛЕТ», в базе данных модуля 58. В этом случае модуль 58 решает задачу диагностики СУ и систем ВС, непосредственно влияющих на безопасность взлета, а также определяет границы допустимых значений в эксплуатации пилотажных и навигационных параметров в соответствии с выражениями:
yi=y(xi), где
yi - измеряемый параметр;
xi - состояние систем МВС и вектор состояния контролируемых пилотажных, навигационных параметров, параметров ВВФ и технического состояния аэродрома.
Каждой измеряемой величине yi устанавливается логическая переменная Bi - TRUE (параметр в допуске); принимающая фиксированные значен: - FALSE (параметр вне допуска).
Причем имеется база данных, J=J(y, x) - поле допустимого значений величин вектора 
В модуле 58 с помощью логической переменной Bi и зависимостей yi=y(xi) и J=J(y, x) формируется логическая функция F(yi, Bi), по значениям которых производится оценка технического состояния СУ и систем МВС, оценка параметрической пилотажной, навигационной информации, информации по ВВФ и технического состояния аэродрома на соответствие требованиям РЛЭ по обеспечению безопасности на этапе «ВЗЛЕТ».
С целью повышения эффективности аварийно-предупреждающей сигнализации может быть использован алгоритм работы, реализованный в модуле 58 с динамическим и статическим и упреждениями срабатывания сигнализации контролируемых параметров, вырабатываемых разрабатываемыми блоками БИСИП МВС и системами ИКБО МВС, позволяющими экипажу заранее предпринять управляющие воздействия, чтобы не допустить выхода МВС на критические и закритические режимы полета, и которые визуально отображаются на индикаторах БИКВПП и дублируется звуковыми тональными сигналами (ЗТС) или речевой информацией (РИ), звуковыми сигналами сильного привлекающего действия (ЗССПД), визуальными сигналами сильного привлекающего действия (ВССПД) - центральными сигнальными огнями, вибротактильными сигнализаторами, установленными на органах управления МВС в зависимости от категорий опасности, приведенных в авиационных правилах АП-25 и в таблице 1.
С целью повышения эффективности каналов уведомляющей, предупреждающей и аварийной сигнальной информации используются исполнительные устройства улучшенной бортовой системы БСАС 15, функционирующие на различных физических принципах и воспринимаемые экипажем с использованием органов зрения, слуха, осязания и обоняния. С этой целью БСАС 15 выдает экипажу визуальные сигналы с использованием принципов когнитивности и искусственного интеллекта, исключая необходимость обращения экипажа к долговременной и оперативной памяти и необходимости выполнения расчетов для оценки текущей ситуации, а именно: используются цифровые счетчики-сигнализаторы, всплывающие текстовые сообщения, всплывающие индексы. При возникновении опасной ситуации из-за превышения контролируемых параметров, установленных в РЛЭ летных эксплуатационных ограничений, срабатывают ЗССПД (сирена) и ВССПД (ЦСО желтого и красного цветов).
В соответствии с логикой работы блока 59 модуля 58 срабатывает управляющая команда (УК) «ВЗЛЕТ ПРОДОЛЖИТЬ/ПРЕКРАТИТЬ», при отказах жизненно важных систем МВС, непосредственно влияющих на безопасный взлет (отказ СУ, пожар СУ, пожар на МВС, отказ управления, неустановка механизации во взлетную конфигурацию для сложившихся условий взлета, взлет на стояночном тормозе и др., определенные в соответствии с требованиями РЛЭ), а также при несоответствии параметров динамики разгона МВС прогнозируемым (расчетным) значениям на этапе разгона до достижения им скорости V1.
БСАС 15 представляет высокоинтегрированную интеллектуальную систему информационной поддержки когнитивной деятельности экипажа, управляемую ЦБВС 13 левого и правого бортов и содержащую источники сигнализации различного физического принципа действия: звуковой тональной сигнализации ЗТС, речевой информации РИ, звуковой сигнализации сильного привлекающего действия ЗССПД, визуальной сигнализации, выполненной с применением когнитивной графики, в том числе визуальные сигнализаторы сильного привлекающего действия ВССПД, а также вибротактильные сигнализаторы, используемые при выходе МВС на воздушном участке взлетной дистанции на максимально допустимые углы атаки и скольжения и при энергичном (излишнем) торможении тормозных колес на разбеге и на пробеге. На этапе набора высоты экипаж реагирует на сигналы срабатывания БСАС 15 включением на МФИ 6 формата отображения страницы отказавшей системы, и выполняет предписание, изложенное в аварийном перечне соответствующего индикатора. Однако, в отличие от стандартных БСАС, БСАС 15 совместно с ЦБВС 13 левого и правого бортов контролирует дополнительно пилотажно-навигационные параметры на всех этапах и режимах полета. Алгоритм контроля пилотажных и навигационных параметров на этапе «ВЗЛЕТ» может быть реализован в отличие от приведенного выше так же, как в алгоритмах работы каналов сигнализации, приведенных в таблице 1, или как показано в источнике информации Солдаткин. В.М. Методы и средства построения бортовых информационно-управляющих систем обеспечения безопасности полета. Казань: Изд-во Казан. Гос. Техн. Ун-та, 2004 г. 350 с. с динамическим и статическим упреждениями срабатывания сигналов аварийной, предупреждающей и уведомляющей категорий, что значительно облегчает экипажу процедуру вывода МВС из особой ситуации полета в нормальный режим. Алгоритмы управления МВС в особых ситуациях, связанных с отказами СУ и систем, могут быть реализованы в соответствии с п.3.4 «Синтез алгоритмов управления в особых ситуациях, связанных с отказами техники» и п.3.5 «Алгоритмы принятия решений в особых ситуациях» Солдаткин. В.М. Методы и средства построения бортовых информационно-управляющих систем обеспечения безопасности полета. Казань: Изд-во Казан. Гос. Техн. Ун-та, 2004 г. и базой данных 63 модуля 58 ЦБВС 13 экспертно-советующей системы оценки особых ситуаций, возникающих на этапе «ВЗЛЕТ», с выдачей рекомендаций экипажу по способам предотвращения АП и локализации аварийной ситуации.
Модуль 58 анализа и принятия решения ЦБВС 13 содержит в своем составе расширенную базу данных (59, 60, 61, 62, 63), а именно:
- эксплуатационных летных характеристик МВС, соответствующей данным РЛЭ и требованиям аэродинамики для данного типа МВС;
- базу данных конфигураций механизации крыла и оперения;
- базу данных максимально допустимых вертикальных скоростей снижения и базу данных минимальных безопасных высот для выполнения полетов по приборам и для визуальных полетов;
- базу данных летных ограничений судна;
- базу данных максимально допустимых отклонений от курса и глиссады при заходе на посадку по точным и не точным системам;
- базу данных по действиям экипажа во внештатных и аварийных ситуациях, соответствующих требованиям РЛЭ и Федеральным авиационным правилам подготовки и выполнении полетов в воздушном пространстве РФ (Европейском воздушном пространстве и других стран);
- базу данных максимально допустимых взлетных/посадочных весов для минимальных располагаемых длин ВПП, максимальных температур аэродрома вылета, максимальных высот аэродромов и минимальных давлений окружающей среды. А при промежуточных значениях температуры наружного воздуха, превышения высоты аэродрома над уровнем моря, давления атмосферного воздуха, фактического ветра, максимально допустимые взлетные/посадочные веса определяются в соответствии с РЛЭ данного типа МВС.
Базы данных хранятся на борту МВС в виде флэш-памяти, а также могут храниться на удаленном компьютере операторов службы организации воздушного движения (ОрВД) и могут передаваться на графические дисплеи БИКВПП через беспроводную технологию телекоммуникационных систем.
Модуль 58 анализа и принятия решений содержит также модуль 63 экспертных систем, который в свою очередь содержит ряд подсистем, которые в процессе накопления опыта эксплуатации могут наращиваться. Первая экспертная система модуля 63 взаимодействует с блоками определения параметров динамики взлета и контролирует: выход МВС на ВПП на осевую линию с оценкой дистанции установки МВС от торца ВПП не далее Sдоп; оценивает величину бокового отклонения на разбеге ±ΔZдоп=ΔZпред-5 - боковое отклонение от осевой линии на исполнительном старте и при разбеге до достижения скорости V1; возможность достижения скорости V1 на дистанции разбега, не далее, чем LСБАЛ. Кроме того, оценивает возможность продолжения/прекращения взлета из-за отказов СУ и систем МВС; возможность возникновения особых случаев полета из-за опасного ВВФ. Первая экспертная система также контролирует процесс разбега на участке, начиная с Vразб=100 км или путевой скорости в диапазоне от нуля до скорости отрыва, с выработкой директорией команды на создание угла тангажа для подъема передней стойки шасси и создания директорного угла тангажа для отрыва МВС от ВПП с предотвращением при этом хвостового удара; контролирует процесс доразгона до достижения скорости V2≥1,25 VСВАЛ с командным директорным управлением угла тангажа с целью предотвращения сваливания МВС на участке набора высоты до достижения приборной скорости для уборки механизации. Модуль 63 соединен с базой знаний параметров динамики разбега и набора высоты для конкретных метеоусловий, конкретного типа и фактического технического состояния ВПП (модули 52÷57). Вторая экспертная система модуля 63 содержит блок математической модели динамики полета МВС и соединена с базой знаний математических моделей этапов взлета и выдает экипажу речевую информацию по предупреждению столкновения с подвижными/неподвижными препятствиями при движении судна по площади аэродрома и на воздушном участке взлетной дистанции. Третья экспертная система модуля 63 соединена с блоками прогноза движения МВС по ВПП после достижения скорости V1 и на воздушном участке полной взлетной дистанции с отказавшими СУ и системами судна и выдает экипажу речевую информацию по предупреждению авиационных происшествий с рекомендациями на продолжение полета до аэродромов назначения или запасных, выполнения вынужденной посадки на аэродроме вылета или на площадки, предназначенные для этих целей. Четвертая экспертная система модуля 63 содержит блок базы знаний по действиям экипажа при прекращении взлета из-за неблагоприятного влияния внешних воздействующих факторов, технических неисправностей СУ и систем МВС и возникновения особых ситуаций (отказы СУ, управления, недостаточности тяги СУ, неисправности ВПУ и подтормаживания пневматиков, пожар на СУ и системах МВС, внезапное появление препятствий на ВПП, угрожающих безопасности взлета, столкновения с препятствиями подвижными и неподвижными и др.). Пятая экспертная система модуля 63 выполнена с блоком знаний невозможности начала разбега МВС (неполная тяга СУ, неустановка механизации во взлетную конфигурацию, нерасстопорение рулей, отказ ВПУ, внезапное превышение параметров ветра установленных ограничений, внезапное ухудшение метеоусловий до метеоминимума ниже установленных ограничений).
Применение экспертных систем БИСИП МВС вызвано необходимостью улучшить информационное обеспечение членов экипажа, управляющих МВС, на этапе взлета в быстроменяющейся аэродинамической обстановке. Однако, увеличение сложности систем МВС приводит к существенному увеличению вероятности отказов и увеличению разнообразия отказов систем МВС. Практически невозможно разработать все инструктивные указания по действиям экипажа при возникновении каждого из возможных отказов. В соответствии с процедурами сертификации конкретного типа МВС подробная инструкция разрабатывается для ограниченного перечня отказов в обычных пределах летных эксплуатационных ограничений, и приводятся в РЛЭ данного типа МВС, в то время заявляемая система БИСИП МВС значительно расширяет функциональные возможности экипажа по обеспечению безопасности полетов и уменьшает зону неопределенности при принятии решений.
Логика работы экспертных систем ЦБВС 13
Параметры измерительно-вычислительных блоков БСИП МВС, а также параметры других составных частей ИКБО, выработанные соответствующими вычислителями, синхронизируются с вычислителями ЦБВС 13 и поступают в базу данных модуля 58, который в свою очередь содержит базы знаний модулей 59, 60, 61, 62, 63. В базе технических знаний экспертов накапливается опыт эксплуатации данного типа МВС на основе анализа причин систематически повторяющихся АПиСИ в виде логических операций: «Если отказала ……, то необходимо……»; «Если допущено отклонение параметра ……, то необходимо ……»; «Если внезапно появился ВВФ……, то необходимо……». Модуль 58 координирует все процессы экспертной системы, объединяя в единую информационную систему поддержки экипажа (оценивает текущую ситуацию для формирования ситуационной осведомленности экипажа в текущем быстроменяющемся режиме взлета). Система управления ЦБВС позволяет пополнить базу данных, базу знаний, базу экспертных знаний по мере необходимости по мере возникновения новых АП и СИ., причины возникновения которых не были учтены ранее. Поэтому экспертные системы модуля 58 диагностирования БРЭО ИКБО, предотвращения ошибочных действий экипажа, предотвращения опасных воздействий ВВФ позволяют существенно расширить перечень задач, решаемых экипажем, контролировать большие объемы быстроменяющихся параметров, принимать правильные и своевременные решения по предотвращению АПиСИ.
Работа системы раннего предупреждения о возможности столкновения МВС с подстилающей поверхностью - рельефом местности и искусственными препятствиями на воздушном участка взлетной дистанции - СРПСПП
Недостатки в обеспечении экипажа достоверной информацией о положении МВС в вертикальной плоскости или ее полное отсутствие часто приводят к АП на этапе взлета. Известные системы предупреждения экипажа о близости земной поверхности (Terrain Awareness And Warning System - TAWS) не обладают способностью предупреждения экипажа о возможности столкновения с рельефом местности в направлении полета, так как в них отсутствует алгоритм «впередсмотрящего».
В заявляемом устройстве СРПСПП БИСИП МВС работает совместно с аппаратурой TAWS, дополнительно используя при этом улучшенное синтезированное SD-отображение ландшафта (рельефа) подстилающей поверхности ЗКП, реализованное с помощью программно-аппаратного комплекса, например: EGPWS фирмы Honeywell (США), содержащего улучшенную базу данных рельефа подстилающей поверхности.
На 3D отображение EGPWS накладываются: расчетная (прогнозируемая) траектория набора высоты (вид сбоку), с расчетными величинами полного и чистого градиентов набора высоты; фактический градиент набора высоты по данным, полученным от БПиНП 21 или БМРК СНС-ССС 19; схемы SID фирмы Jeppesen (США). При этом, если фактическая опасная траектория набора высоты, образованная из-за недостаточности угла наклона траектории к плоскости истинного горизонта (недостаточность тяги СУ, сверхнормативная коммерческая загрузка МВС, обледенение, ошибки в пилотировании из-за отсутствия информационного обеспечения экипажа и др.) пересекается с расчетной траекторией, а элементы рельефа местности с искусственными препятствиями на них, высота которых превышает плоскость фактической траектории набора высоты, продленной на удаление 50÷100 км впереди МВС, и истинная высота полета на траектории, меньше или равна безопасной высоте полета (Нбез), рассчитанной для участков набора высоты, горизонтального полета, снижения, захода на посадку, маневрирования в районе аэродрома в соответствии с Федеральными Авиационными Правилами "Подготовка и выполнение полетов (ФАП - 128) в Гражданской Авиации Российской Федерации" и введенных в действие Приказом Минтранса России от 31.07.2009 №128 (раздел «Порядок расчета безопасных высот полета»); Федеральными Авиационными Правилами Производства Полетов Государственной Авиации, утвержденными Приказом Минобороны России от 24.09.2004 №275 изображаются проблесковым красным цветом и дублируются ЗССПД. Общая ситуационная осведомленность улучшается за счет представления экипажу полной информации о пространственном положении и местоположении в вертикальной и горизонтальной плоскостях с упреждением срабатывания сигнализации об опасном сближении с рельефом и искусственными препятствиями не только под МВС, но и в направлении полета за счет применения когнитивной графики, всплывающих текстовых сообщений, ЦСС. При этом аварийно-предупреждающая визуальная сигнализация дублируется срабатыванием звукового сигнала сильного привлекающего действия. На этапе набора высоты над сложным рельефом местности используется полная прогнозируемая информация о возможности преодоления препятствий с оценкой потенциальной способности МВС набрать минимальную безопасную высоту, необходимую для преодоления препятствий и предотвращения столкновений с земной поверхностью.
Расчетные углы возвышения точек рельефа земной поверхности над текущем положением МВС в вертикальной плоскости впереди МВС в направлении его движения в пределах ширины воздушной трассы и с учетом возможности отклонения от ее оси ±25 км определяются в автоматическом режиме путем использования программно-аппаратного комплекса EGPWS, текущих координат местоположения и путевой скорости, углов крена, тангажа, курса, полученных с БП и НП 21 или БМРК СНС-ССС 19, с учетом скорости и направления ветра, рассчитанных ИКВСиМП 20 и с оценкой возможности преодоления препятствий на высоте не ниже Нбез, которая содержится в базе данных модуля 58 ЦБВС 13 для каждого участка маршрута полета или района полетов при выполнении специальных и внетрассовых полетов.
Технические данные об аэродромах вылета: характеристики ВПП; стандартные схемы МС, руления, SID; наличие препятствий и рельеф EGPWS представлены в базах данных ЦБВС 13, в соответствии с рекомендациями спецификации ARINC 424, причем для каждого ВПП имеется перечень схем вылета. Однако, взлетные характеристики МВС, изменяющиеся от фактических МУ, предупреждений NOTAM, SNOTAM накладывают ограничения на возможность выполнения той или иной схемы SID, так как вертикальный профиль SID характеризуется градиентом набора высоты, зависящим от этапов взлета и типа МВС и ВВФ (ФМУ, техническое состояние МВС, техническое состояние ВПП), а поэтому перед каждым взлетом БИСИП МВС оценивает возможность взлета по той или иной схеме.
Формат отображения на взлетном индикаторе фактического и расчетного вертикального профиля на фоне EGPWS (вид сбоку) наиболее точно представляет субъективную оценку экипажа о положении МВС в вертикальной плоскости и предназначен для улучшения ситуационной осведомленности о вертикальном положении на всех этапах полета и раннего выявления отклонения МВС от заданной траектории набора высоты или снижения по глиссаде. Формат отображения появляется на навигационном индикаторе после отрыва МВС на высоте более 10 м и дополнительно содержит отображение символа МВС, профиль рельефа, схемы SID, схемы площадок для аварийной или экстренной посадки, курс и удаление до них. После набора высоты 400 м формат отображения на навигационном индикаторе в автоматическом режиме переходит в режим индикации навигационных параметров, который выполняется с применением когнитивных технологий и который позволяет экипажу быстро и безошибочно оценить (с первого взгляда) ситуацию в вертикальной и горизонтальных плоскостях. Комбинация параметров вертикальной и горизонтальной навигации, размещенных на КИНО 3, легко воспринимается экипажем за счет возможности сравнения фактической траектории с относительно заданной траекторией набора высоты или снижения для данного аэродрома.
В заявляемом БИСИП МВС может быть применен способ отображения на КПИ 1, КИНО 3 трехмерного изображения EGPWS без применения специальных очков, описанный, например, в заявке США на изобретение №2012105318, G06F 3/041, опубл. 03.05.2012, патенте США №8344911, G02F 12\00, опубл. 01.01.2013 г., ЕР 20120183027, G01C 23/00, опубл. 13.03.2013, которые предназначены для целей обеспечения экипажа повышенной ситуационной осведомленностью о характере рельефов подстилающей поверхности подстилающей поверхности закабинного пространства. Заявляемые форматы отображения информации с применением 3D изображения рельефа подстилающей поверхности и текущего положения своего МВС на фоне SVS изображения схем в вертикальной и горизонтальной проекциях на КИИ 1, КИНО 3 исключают потерю экипажем пространственной ориентировки и местоположения МВС на всех этапах полета, в том числе при выполнении высокоманевренных режимов полета.
В заявляемой системе СРПСПП БИСИП МВС используются новые системы визуализации закабинной обстановки на участках набора высоты, горизонтального полета, снижения и захода на посадку, а также при выполнении внетрассовых полетов и выполнении специальных полетов на предельно малых высотах, в том числе с огибанием рельефа местности, а именно: применение комбинированного отображения (CVS), включающего SVS отображение EGPWS закабинной обстановки на высотах выше Нбез и EFVS отображения закабинной обстановки в реальном режиме времени при полетах на высотах Нбез и ниже на участках взлета и захода на посадку. При этом на SVS и EFVS отображения ЗКП накладываются прогнозируемые чистые, полные градиенты набора высоты, фактический градиент набора высоты, текущее местоположение МВС в вертикальной и горизонтальных плоскостях; схемы SID, подхода и захода на посадку, маневрирования в зонах воздушных подходов, движение МВС по площади аэродрома, которые резко повышают общую ситуационную осведомленность за счет представления экипажу в реальном режиме времени полной информации о пространственном местоположении МВС в вертикальной и горизонтальной плоскостях, с прогнозом опасного сближения с рельефом подстилающей поверхности на всех этапах полета, выполненного с упреждением срабатывания сигнализаций об опасном сближении с подстилающей поверхностью не только под МВС, но и в направлении полета. Это достигается использованием высокоточного БПиНП 21, функционирующего в комплексированном режиме работы с применением когнитивной графики и улучшенной БСАС 15, исключающей необходимость обращения экипажа к долговременной и оперативной памяти и исключения необходимости выполнения расчетов безопасных высот (Нбез), зависящих в свою очередь от применяемых правил полетов (ПВП, ППП, ОПВП) и характеристик рельефа подстилающей поверхности, которые в заявляемом устройстве выполняются автоматически по данным EGPWS, хранящимся в базе данных модуля 57 ЦБВС 13 и блоков 19, 20, 21, БИСИП МВС. При снижении МВС вне видимости земных ориентиров ниже безопасных высот Нбез по сигналам БСАС 15 САУ 26 автоматически переводит МВС в режим горизонтального полета на высоте не ниже Нбез с исключением возможности столкновения МВС с препятствиями, находящимися в направлении полета. При этом при снижении МВС ниже Нбез звуковые сигналы сильного привлекающего действия БСАС 15 срабатывают независимо от формата отображения навигационных параметров на индикаторах КИНО 3 левого и правого пилотов, а ЦБВС 13 автоматически переводят КИНО 3 командира МВС в режим отображения подстилающей поверхности.
Дополнительно на взлетном индикаторе КИНО 3 отображаются расчетные безопасные высоты на текущий момент времени в зависимости от местоположения МВС, используемых правил полетов и характера рельефа местности. Цифровые счетчики-сигнализаторы безопасных высот на индикаторах КИНО 3 трехмерного отображения EGPWS кодируются зеленым цветом, когда фактические величины Нист; Нбар>Нбез; где Нбез - расчетная величина, определенная по алгоритмам показанным выше, а когда Нист>Нбар=Нбез - желтым цветом, и красным проблесковым, когда Нист; Нбар<Нбез, при этом дополнительно срабатывает дублирующая звуковая сигнализация.
Заявляемая система СРПСПП отличается от существующих систем TAWS или СРППЗ тем, что:
- для этапов взлета МВС над сложным рельефом используется полная прогнозируемая информация с оценкой возможности преодоления препятствий - потенциальной способности МВС набрать безопасную высоту, необходимую для преодоления препятствий и предотвращения столкновения с рельефом местности, причем применение высокоточной EGPWS позволяет заблаговременно определить направление маневра еще до начала набора высоты;
- разрабатываются новые программно-аппаратные средства для формирования улучшенного отображения рельефа земной поверхности в зонах воздушных подходов, на участках взлета, горизонтального полета, снижения, захода на посадку, содержащие 3D изображение рельефа подстилающей поверхности; отображение точного местоположения МВС в вертикальной и горизонтальной плоскостях; отображение полного, чистого и фактического градиентов набора высоты; параметров разворотов, разгонных характеристик и торможения; силы и направления ветра с оценкой возможности дальнейшего безопасного набора высоты на заданном курсе/изменении курса для обхода препятствий или необходимости выполнения экстренного маневра по предотвращению столкновения с использованием допустимых в эксплуатации режимов полета: ( ;
; ; αдоп; СУ - чрезвычайные режимы; γдоп; nдоп (
; αдоп; СУ - чрезвычайные режимы; γдоп; nдоп ( ;
;  ;
;  )).
)).
- расчетные углы возвышения точек рельефа земной поверхности над текущим положением МВС в вертикальной плоскости определяются за счет использования новых аппаратно программных средств: EGPWS, БПиНП 21, БМРК СНС-ССС 19 и ИКВСПиМП 20 с учетом фактических метеорологических условий, текущего пространственного и местоположения МВС и оценки возможности преодоления препятствий на высоте не менее, чем истинная безопасная высота, гарантирующая предотвращение столкновения с рельефом и искусственными препятствиями, которые определяют ЦБВС 13 левого и правого бортов на основе полученных из базы данных ЦБВС 13 технических характеристик маневров разворотов: радиусов, максимально допустимых углов крена и скольжения, перегрузок; вертикальных маневров: вертикальных перегрузок, допустимых углов атаки, разгонных и тормозных характеристик, истинных безопасных высот;
- для повышения уровня ситуационной осведомленности экипажа на воздушном участке взлетной дистанции на фоне 3D отображения EGPWS организовано представление экипажу фактического вертикального и горизонтального местоположения МВС, профилей SID, отображение расчетных чистого и полного градиентов набора высоты для данного типа МВС с учетом максимально допустимого взлетного веса, фактических метеорологических условий, технических характеристик аэродрома вылета;
- для снижения психофизиологической нагрузки на экипаж, освобождения его от рутинных операций по расчету безопасных высот полета и необходимости обращения к долговременной и оперативной памяти при одновременном пилотировании, на КИНО 3, а именно: на цифровых счетчиках-сигнализаторах (ЦСС), дополнительно отображаются текущие, безопасные высоты полета (Нбез), зависящие от правил полетов (ПВП, ППП) и характера рельефа подстилающей поверхности;
- имеет дополнительную аварийно-предупреждающую сигнальную информацию, если величина рассогласования Δη=ηПОТР-ηРАСП≥0, при этом ЦБВС 13 дополнительно рассчитывает область допустимых значений  , t0, Р0, U, δ;
, t0, Р0, U, δ;  (КСЦ.; требов. РЛЭ); Uв;
(КСЦ.; требов. РЛЭ); Uв;  ;
;  (КСЦ.; требов. РЛЭ); потребные дистанции разбега, прерванного взлета, продолженного взлета на аэродроме вылета, в пределах которых возможен взлет по заданной SID.
(КСЦ.; требов. РЛЭ); потребные дистанции разбега, прерванного взлета, продолженного взлета на аэродроме вылета, в пределах которых возможен взлет по заданной SID.
СРПСПП дополнительно позволяет:
- заблаговременно определить направление маневра еще до начала набора высоты/снижения, и опасные скорости сближения МВС с земной поверхностью, опасную вертикальную скорость снижения, снижение МВС ниже Hбез на всех этапах полета, а при заходе на посадку опасное снижение ниже глиссады;
- обеспечить мониторинг в реальном режиме времени с каждого рабочего места пилота внешней закабинной обстановки вокруг МВС со звуковой и визуальной сигнализацией об опасном сближении с препятствиями или земной поверхностью;
- улучшить отображение рельефа подстилающей поверхности, представляемого экипажу на индикаторах КИНО 3, не только под МВС, но и впереди его в пределах ширины воздушной трассы при полетах по установленным воздушным трассам и при полетах вне воздушных трасс в радиусе не менее 40 морских миль в передней полусфере в зависимости от истинной скорости полета МВС, которое представляет экипажу наложенную (комбинированную) визуальную наглядную информацию и обеспечивает его общей ситуационной осведомленностью - качественной информацией полной, достоверной, актуальной, оперативной, о том, каким образом экипаж может преодолеть препятствия, расположенные на поверхности земли:
- без изменения курса и угла наклона траектории;
- с переходом в режим наивыгоднейшего набора высоты;
- экстренным режимом набора высоты на чрезвычайных режимах работы двигателей и одновременным отворотом на безопасный курс;
- перед каждым взлетом проводить автоматическую оценку возможности взлета по той или иной схеме SID.
Вычислительные системы БИСИП МВС могут обеспечить формирование любого формата отображения на взлетном индикаторе прогнозируемых и фактических параметров траектории движения на фоне EGPWS. В заявляемой БИСИП МВС формируются управляющие команды для предупреждения столкновения с препятствиями по тангажу и курсу, как наиболее удобные и интуитивно понятные экипажу.
Работа БИСИП МВС по информационному обеспечению экипажа по опасным режимам набора высоты на воздушном участке взлетной дистанции
В заявляемом устройстве реализовано представление экипажу информации о фактических и допустимых углах атаки и скольжения в зависимости от конфигурации механизации и этапов набора высоты на воздушном участке взлетной дистанции. Данная система дополнительно позволяет учесть влияние скольжения и вращения МВС на точность определения углов атаки, а также повысить достоверность обнаружения выхода МВС на опасные режимы полета на воздушном участке взлетной дистанции (особенно при наборе высоты с отказом критического двигателя). Обеспечить безопасность полетов на больших углах атаки и углах атаки, когда α=αдоп, где максимально используются летно-технические характеристики воздушного судна, можно в соответствии с приведенной на рис.5.1. стр.177 структурно-функциональной схемой канала предупреждения выхода МВС на опасные углы атаки источника информации Солдаткин В.М. Методы и средства построения бортовых информационно-управляющих систем обеспечения безопасности полета. Казань: Изд-во Казан, гос. техн. ун-та, 2004. 350 с.
Данная система БСИП МВС отличается от существующих систем контроля допустимых углов атаки расширением функциональных возможностей, а именно: наличием дополнительного контроля углов скольжения для обнаружения выхода МВС на опасные режимы полета на воздушном участке взлетной дистанции за счет применения ИКВСиМП 21 с расширенными функциональными возможностями.
Работа системы контроля стопорения рулей и элеронов
Система контроля содержит: саму систему стопорения рулей и элеронов - электромеханизмы, соединенные со стопорами, содержащими концевые выключатели, сигналы с которых в виде «РУЛИ И ЭЛЕРОНЫ ЗАСТОПОРЕНЫ/РАССТОПОРЕНЫ» поступают одновременно в комплексную систему управления силовыми установками (КСУ/СУ) и в модуль 54 ЦБВС 13 по линиям связи ОСС. При этом, в случае попытки взлета с застопоренными рулями исполнительные устройства перемещения РУДов по команде модуля 58 ЦБВС 13 блокируются, одновременно срабатывают ЗССПД БСАС 15, и тем самым исключается возможность взлета с застопоренными рулями, так как при этом невозможно переместить РУДы выше малого земного газа (ЗМГ). Заявляемая система контроля стопорения рулей и элеронов отличается от существующих аналогичных систем тем, что позволяет экипажу произвести запуск двигателей, руление, занятие исполнительного старта с застопоренными рулями и элеронами, что предотвращает повреждение рулей и элеронов при сильном порывистом ветре, а также обеспечивает возможность безопасного руления по площади аэродрома при малых коэффициентах сцепления, покрытия МС, РД, ВПП снегом, слякотью, влагой и при их гололедном состоянии и однозначно исключает возможность взлета при застопоренных рулях и элеронах.
Работа системы мониторинга установки механизации крыла и оперения во взлетную конфигурацию
Модуль 54 ЦБВС 13 в соответствии с расчетными данными, полученными от модулей 52, 53, 54, 55, 56, 57, 58, 64 определяет конфигурацию взлетного положения механизации крыла и стабилизатора МВС для сложившихся условий взлета. Экипаж перед выруливанием устанавливает во взлетное положение закрылки, предкрылки, стабилизатор. В случае несоответствия конфигурации механизации на исполнительном старте при фактических, текущих условиях: техническом состоянии МВС, его фактическом полетном весе, техническом состоянии ВПП и фактических метеорологических условий, срабатывает ЗССПД (сирена) БСАС 15 и блокируется управление РУДами так же, как показано выше.
Система контроля взлетной конфигурации крыла и оперения БИСИП МВС отличается от существующих тем, что определяет взлетную конфигурацию крыла и оперения для каждого конкретного случая взлета в зависимости от технического состояния МВС, фактических метеорологических условий окружающей среды, технического состояния аэродрома вылета, с оценкой фактической коммерческой загрузки и предотвращает взлет при конфигурации крыла и оперения, не соответствующей требованиям РЛЭ по обеспечению безопасного взлета и имеет при этом когнитивную аварийно-предупреждающую сигнальную информацию, продублированную звуковой сигнализацией сильного привлекающего действия.
Работа системы информационной поддержки экипажа по метеорологическим параметрам окружающей среды
Система относится к графическим интерфейсам в кабине экипажа, в частности, к системам преобразования речевой информации в графический символьный вид. При этом метеоинформация, получаемая экипажем в автоматическом режиме по каналам УКВ радиосвязи (информация ATIS) при заходах на посадку или взлете, параметры наземной погоды в реальном режиме времени нуждаются в преобразовании в графический вид с целью повышения ситуационной осведомленности экипажа о состоянии фактических метеоусловий на аэродромах взлета и посадки в реальном режиме времени, без необходимости обращения к долговременной памяти и выполнения рутинных расчетов с целью оценки возможности безопасного взлета/посадки в соответствии с требованиями РЛЭ данного типа МВС. При этом система отличается от существующих тем, что повышается оперативная ситуационная осведомленность экипажа особенно, сформированного из двух пилотов, без необходимости глубокого анализа фактических метеоусловий и потерь времени на ее восприятие слуховым анализатором, перевода метеоинформации ATIS с английского языка на родной язык эксплуатанта, необходимости обращения к долговременной памяти для расчета фактических встречных/попутных, боковых составляющих скорости ветра относительно осевой линии ВПП (курсов взлета/посадки) и сравнения их с допустимыми значениями в зависимости от коэффициента сцепления и технического состояния ВПП. С появлением цифровой линии передачи данных между МВС и операторами службы ОрВД (организация воздушного движения), цифровой линии связи (ACARS) появилась возможность обеспечить экипаж визуальным отображением информации о метеоусловиях на основных, запасных, промежуточных аэродромах в реальном режиме времени. В заявляемом устройстве формат отображения сведений о ФМУ на индикаторах КИНО 3 имеет отметку времени, наименование аэродрома и наименование информации. Когнитивное представление ФМУ обеспечивает экипаж информацией об опасных явлениях погоды или несоответствиях отдельных параметров ФМУ, например: боковых или встречных/попутных составляющих скорости ветра, нижний границы облаков, видимости на ВПП требованиям РЛЭ. Для этих целей БИСИП МВС содержит модуль DATIS 27, предназначенный для преобразования речевой информации АТИС в цифровой вид DATIS, а в последующем в графический вид, отображаемый на индикаторах КПИ 1, ИЛС 2 и КИНО 3. Причем на индикаторе КИНО 3 отображается полный набор параметров ФМУ, на индикаторах КПИ 1, ИЛС 2 только когнитивное отображение направления и скорости ветра и допустимые в эксплуатации значения встречной/попутной, боковой составляющих скорости ветра в зависимости от технического состояния ВПП, формат отображения которых приведен на Фиг.8, Фиг.9, Фиг.10. Преобразование речевой информации в графический вид может быть организовано известным способом, описанным в заявке США №2011291861, G08B 21/00, опубл. 01.06.2010 г.
Система представления экипажу параметров фактических метеорологических условий на аэродромах вылета, назначения и запасных (АТИС), отличается от существующих систем тем, что информация о фактических метеорологических условиях экипажу представляется в реальном режиме времени с помощью графических символов и текстовых сообщений, в том числе и сигнальная информация о соответствии/несоответствии ФМУ для безопасного взлета, посадки МВС без необходимости обращения экипажа к долговременной оперативной памяти, затрат времени на перевод речевой информации с английского языка на родной язык эксплуатанта МВС, существенно улучшает оперативное взаимодействие между членами экипажа без потери управляющих команд, выдаваемых командиром МВС, а также способствует организации дополнительного контроля за выполнением наиболее ответственных операций, предусмотренных картами контрольных проверок (Check листами).
Работа системы по предотвращению взлета/посадки с превышениями нормативного взлетного/посадочного веса
Максимально допустимый взлетный вес  - есть сумма множества слагаемых величин, меняющихся от полета к полету. Множество исходных данных, используемых при расчете , являются предпосылкой к ошибкам в расчетах взлетных характеристик (взлетных скоростей, полетного веса, центровки и др.) даже при высокой степени автоматизации процесса. В заявляемом устройстве расчет выполняется в соответствии с алгоритмами, изложенными в РЛЭ МВС.
- есть сумма множества слагаемых величин, меняющихся от полета к полету. Множество исходных данных, используемых при расчете , являются предпосылкой к ошибкам в расчетах взлетных характеристик (взлетных скоростей, полетного веса, центровки и др.) даже при высокой степени автоматизации процесса. В заявляемом устройстве расчет выполняется в соответствии с алгоритмами, изложенными в РЛЭ МВС.
Исходные данные для расчета максимально допустимого взлетного веса: фактические метеорологические условия, технические характеристики МВС, технические характеристики ВПП, поступают в модуль расчета 64 от модулей 52÷57 ЦБВС 13, а информация о фактическом взлетном весе - от цифрового измерителя взлетного веса ЦИВВ 22. Автоматизация расчета взлетных летно-технических характеристик МВС также может производиться в соответствии с материалами, приведенными в источнике информации М.Р. Алкина, И.В. Калинина «Автоматизация расчета взлетных летно-технических характеристик». «Гироскопия и навигация» СПб. 2005. На этапах предстартовой подготовки экипажа, руления, занятия исполнительного старта модуль 58 ЦБВС 13 сравнивает максимально допустимую величину взлетного веса, полученного от модуля 64, и фактический взлетный вес, полученный от ЦИВВ 22, и вырабатывает управляющую команду «К ВЗЛЕТУ ГОТОВ/НЕ ГОТОВ» в зависимости от соответствия/несоответствия взлетного веса требованиям РЛЭ, рассчитанным по данным модулей 54, 55, 56, 57 и данным ОСС, полученным по линиям связи 66 в автономном режиме работы модуля 64 или по данным СЗМ 14, поступающим в модуль 64 ЦБВС 13 от устройства ввода/вывода 65. А в случае резкого изменения ФМУ на исполнительном старте и несоответствия параметров ФМУ для взлета с заявленным полетным весом и/или появления внезапных отказов систем МВС и СУ, срабатывает визуальная сигнализация «ВЗЛЕТ ПРЕКРАТИТЬ», которая дублируется ЗССПД БСАС 15.
Система предотвращения взлета/посадки с превышениями нормативного взлетного/посадочного веса БИСИП МВС отличается от существующих систем тем, что в автоматическом режиме система оценивает возможность безопасного взлета/посадки с максимально допустимой коммерческой загрузкой, с оценкой фактического технического состояния МВС, ФМУ и технического состояния аэродрома, и с оценкой возможности преодоления препятствий на воздушном участке взлетной дистанции и возможности выполнения взлета по той или иной схеме SID, а в случаях превышения коммерческой загрузки нормативных ограничений на этапах предстартовой подготовки, руления и занятия исполнительного старта срабатывает аварийно предупреждающая визуальная и звуковая сигнальная информация.
Работа системы информационной поддержки экипажа для безопасной наземной навигации на аэродроме - системы раннего предупреждения по предотвращению столкновений с подвижными/неподвижными препятствиями на аэродроме при перемещении МВС по аэродромной площади.
Система использует индикаторы КПИ 1, ИЛС 2 и/или КИНО 3 для отображения в реальном режиме времени подвижных и неподвижных препятствий на МС, РД и ВПП, а также при причаливании МВС к терминалам и подъезде специальных автотранспортных средств к МВС и опасной скорости сближения с ними. Структурная схема построения системы предупреждения об опасных препятствиях и опасной скорости сближения с ними при перемещении МВС по площади аэродрома приведена на Фиг 5.
В состав системы входят: оптико-электронная система отображения ЗКП и подвижных и неподвижных препятствий в реальном режиме времени - ОЭС ЗКП 67, видеопроцессор улучшенного отображения закабинной обстановки и подвижных и неподвижных препятствий на аэродромной площади.
Система взаимодействует с ЦБВС 13, на вход которой поступают пилотажная и навигационная информации от ИКВСиМП 20 и БПиНП 21, а от СЗМ 14 или базы данных модуля 58, данные о допустимых безопасных расстояниях до подвижных и неподвижных препятствий на различных режимах перемещения МВС по аэродромной площади (причаливания к терминалам, на стоянках, руления и занятия исполнительного старта), приближении к МВС различных технических средств (спецавтотранспорта) с целью проведения технического обслуживания, а также данные о допустимых скоростях сближения препятствий с МВС или МВС с препятствиями.
Система через ЦБВС 13 дополнительно взаимодействует с БСАС 15. ЦБВС 13 при этом по данным ОЭС ЗКП 67 в зависимости от удаления неподвижных препятствий от МВС и скорости приближении подвижных препятствий к МВС информирует экипаж о наличии препятствий в зоне перемещения самолета по аэродромной площади и выдает уведомляющую, предупреждающую и аварийную сигнальную информацию (для срочного прекращения маневрирования МВС) с использованием визуальных, звуковых сигналов, в том числе и сигналов сильного привлекающего действия. В качестве аппаратных средств модуля ОЭС ЗКП 67 используются микротелевизионные камеры малого и среднего диапазонов видеообзора за окружающей средой ТК-1, ТК-2 модуля 69, например, самый миниатюрный в мире оптический дальномер, скомплексированный с телекамерой Opti-Logic Micro II, измеряющий расстояние в диапазоне от 4 м до 800 м и содержащий дополнительно инфракрасный лазер, микролазерные дальномеры малого и среднего диапазона измерения дальности ЛД-1, ЛД-2 модуля 70, например, микролазерные дальномеры Micro LM-100 с погрешностью измерения 1,5 мм в диапазоне до 50 м, или лазерный дальномер Bosch GLM80 (http://rozetka.com.ua/bosch_glm_80_pro/p165301/);, микро-инфракрасные камеры ИК-1, ИК-2 модуля 71 разного диапазона частот, например, Micro-Epsilon тепловизор, тепловизоры серии FLIR i3, FLIR i5, FLIR i7 - самые миниатюрные в мире (http://voltooo.com.ua/pages/products/Teplovizor.aspx?ID=3). которые комплексируются с лазерными дальномерами малого и среднего диапазонов; группа мини РЛС малого радиуса действия от 0÷5 м, например, DENSO Develops Higher Performance Millimeter-wave Radar или a low-cost, finger-nail sized, приведенный в материалах: http://www.intechopen.com/books/radar-technology/planar-antenna-technology-for-mm-wave-automotive-radar-sensing-and-communications, а также видеопроцессор, предназначенный для получения улучшенного видеоизображения подвижных и неподвижных препятствий, как в направлении движения МВС в передней полусфере, так и слева и справа, в хвостовой части фюзеляжа, конструктивно объединенные в едином корпусе и образующие оптико-электронную систему наблюдения за препятствиями внешней среды ЗКП (ОЭС ЗКП 67).
Вышеназванные ОЭС ЗКП 67 устанавливаются на законцовках правого и левого крыла, на киле фюзеляжа и на передней стойке шасси для контроля процесса руления, заруливания на стоянки МВС и занятия исполнительного старта по специальным разметкам осевых линий, нанесенных на МС, РД, ИВПП (искусственная взлетно-посадочная полоса).
Архитектура мультиспектральной системы технического зрения закабинной обстановки для обнаружения подвижных и неподвижных препятствий ОЭС ЗКП 67 с применением видеопроцессора 68 может быть построена с предложенными в источнике информации средствами: Бондаренко А.В., Бондаренко М.А., Докучаев И.В., «Аппаратная реализация бортовой автономной системы улучшенного и синтезированного зрения мобильной техники». ООО «Растр Технолоджи» www.rastr.net, г. Москва.
Данная система отличается от систем, предназначенных для обнаружения подвижных/неподвижных препятствий тем, что на индикаторах КПИ1, ИЛС 2, КИНО 3 по желанию членов экипажа выводится улучшенное отображение закабинной обстановки с изображением препятствий на ней, а также разметка осевой линии РД, ИВПП, руления независимо от ФМУ днем и ночью и в любое время года, причем на отображение ЗКП накладывается текущее местоположение МВС на аэродромной площади, полученное от ЦБВС 13. Алгоритм работы системы может быть реализован аналогично алгоритмам работы горизонтального канала системы TCAS (Traffic alert and Collision Avoidance System) - системы предупреждения столкновения с препятствиями в воздухе. В этом случае выделяются зоны выдачи экипажу уведомляющей, предупреждающей и аварийной сигнальной информации, и выдается экипажу визуальная и речевая информация, например, уведомляющая информация: ВПЕРЕДИ/СПРАВА/СЛЕВА/СЗАДИ ОПАСНОЕ ПРЕПЯТСТВИЕ», аварийная информация: «РУЛЕНИЕ ПРЕКРАТИТЬ: СПРАВА/СЛЕВА/СЗАДИ ОПАСНОЕ ПРЕПЯТСТВИЕ», «ОПАСНАЯ СКОРОСТЬ СБЛИЖЕНИЯ С ПРЕПЯТСТВИЕМ ВПЕРЕДИ/СПРАВА/СЛЕВА/СЗАДИ». При этом, экипаж, используя кнопочное обрамление КИНО 3 может вывести на его экран видеоизображение опасных препятствий, а также положение пневматиков передней стойки шасси относительно разметок осевых линий ИВПП, РД и линий для заруливания/выруливания на МС. Наиболее удобной с точки зрения пилотирования является установка нажимного переключателя на штурвале или на ручке управления самолетом (РУС), которое позволяет экипажу включать/отключать, использовать режим ЗУМ (ZOOM - режим масштабирования для изменения угла обзора обнаруженных препятствий и детального их рассмотрения).
Работа системы мониторинга состояния шасси и тормозной системы МВС
Тормозная система на МВС используется на стоянке, рулении, разбеге (в начальном этапе), после уборки шасси, на пробеге и при прекращении взлета. Для предотвращения взлетов на стояночном тормозе и посадок на стояночном тормозе (заторможенных колесах), непроизвольного подтормаживания пневматиков основных стоек шасси на разбеге и контроля состояния тормозной системы (целостность пневматиков шасси, перегрев блоков тормозных барабанов, разворот стоек шасси, целостность элементов конструкции шасси) БИСИП МВС имеет технические средства, позволяющие экипажу получать в реальном времени информацию о состоянии тормозов, пневматиков и стоек шасси на этапах стоянки, руления, взлета, пробега и перед началом снижения МВС. БИСИП МВС дополнительно имеет технические средства: трехзонный сигнализатор положения шасси с сигнализаторами убранного, выпущенного и промежуточного положения шасси с командным табло «ВЫПУСТИ ШАССИ»; вибродатчики, устанавливаемые на тормозных педалях шасси; инфракрасные телевизионные камеры, устанавливаемые в каждой нише стойки шасси.
Информация о состоянии тормозной системы и состоянии конструкции шасси передается от датчиков системы торможения 33 (температура, давление гидрожидкости, ход штока тормозных педалей шасси, ход штока тормозных дисков, инфракрасные телевизионные камеры, установленные в нишах шасси) по КЛС системы ОСС левого и правого бортов, поступает на концентраторы сигналов БКС 17 левого и правого бортов, где преобразовывается и поступает на вход ЦБВС 13, который в модуле 58 содержит базу данных технических характеристик шасси и системы торможения. В случае несоответствия параметров шасси и торможения, выдаваемых блоками 30, 33, 37, 32 ОСС, срабатывают сигнализаторы БСАС 15. Отображение работы системы торможения осуществляется на ИЛС2 и МФИ 6 БИКВПП и отличается тем, что при разбеге с включенным стояночным тормозом и/или непроизвольном подтормаживании колес пилотами на разбеге в течение более пяти секунд срабатывает АПСИ: РИ «ОПАСНОЕ ТОРМОЖЕНИЕ». Подтормаживание колес на разбеге может определяться с помощью датчиков контроля системы торможения: температуры тормозной системы, датчиков давления гидросистемы, датчиков давления рабочей жидкости системы торможения, скорости вращения колеса, степени отклонения тормозных педалей после достижения МВС на разбеге скорости V>100 км/час.
Система торможения и контроля состояния шасси, контролируемая БИСИП МВС, отличается от известных систем торможения и контроля шасси тем, что значительно повышается общая осведомленность экипажа о состоянии системы торможения и текущего технического состояния шасси за счет ввода дополнительной визуальной, звуковой, вибротактильной сигнализации, а именно:
- о начале взлета МВС на стояночном тормозе и заходе на посадку на заторможенных колесах;
- о разбеге на подторможенных колесах при движении по ВПП и достижении воздушной скорости более 100 км/час;
- о перегреве тормозных устройств при длительном рулении с использованием подтормаживания основных пневматиков шасси при рулении с малыми коэффициентами сцепления РД, ВПП и при сильных боковых ветрах;
- о разрушении пневматиков шасси после их уборки и их общем работоспособном количестве;
- о зависании стоек шасси в промежуточном положении без установки их на замки убранного/выпущенного положения.
- наличием средств контроля включения тормозных устройств на разбеге после начала устойчивого роста скорости, например: после достижения скорости больше 100 км/час в течение 5, предназначенных для получения информации о применении экипажем подтормаживания колес на разбеге;
- наличием АПСИ о включении стояночных тормозов на исполнительном старте и перед снижением;
- наличием средств сигнализации (звуковых и вибротактильных), энергичного (избыточного) торможения, параметры которого (давление в системе торможения пневматиков шасси, ход тормозных педалей) превышают пороговые значения, предназначенных для предотвращения разрыва пневматиков тормозных колес шасси при прекращенном взлете, опасности выкатывания за пределы ВПП или ошибок экипажа, связанных с применением энергичного торможения в начале пробега МВС;
- наличием средств контроля включения/отключения и исправности антиюзовой автоматики, направленной на предотвращение возникновения гидроглиссирования и потери направления движения МВС по ВПП, РД с использованием средств вибрации тормозных педалей;
- повышением уровня осведомленности экипажа о различном применении тормозов для распознавания интенсивности торможения от степени нажатия на тормозные педали при стоянке, рулении, разбеге, непроизвольном подтормаживании колес на разбеге, экстренном торможении, ошибочном торможении в начале пробега, включенной/отключенной антиюзовой автоматики;
- наличием средств сигнализации об износе тормозных дисков, их перегреве на рулении и возможном отказе тормозной системы;
- наличием средств контроля целостности пневматиков шасси и элементов конструкции шасси после их уборки и перед началом снижения.
Работа системы информационной поддержки экипажа на разбеге МВС по командному управлению углами тангажа
Система предназначена для предотвращения хвостовых ударов при разбеге по ВПП и потери скорости и сваливания МВС на воздушных участках взлетной дистанции.
Используя данные БМРК СНС-ССС 19, ИКВСиМП 20, БПиНП 21 и показания датчиков обжатия передней стойки шасси, обжатия основных стоек шасси, имеющихся в существующих системах контроля шасси, ЦБВС 13 при достижении приборной скорости VП.CT; VОТР; V2; V3; V4, рассчитанных на основании исходных данных ФМУ, технического состояния ВПП, фактического взлетного веса, вырабатывает команды на создание угла тангажа на подъем передней стойки шасси, отрыв, доразгон до скорости V2, безопасного набора высоты с выпущенной механизацией с заданной конфигурацией V3, набора высоты с чистым крылом V4 в соответствии с выражениями вида, например, для подъема передней стойки: ϑП.СТ=f[Cy(αП.СТ)]. ЦБВС 13 определяет оптимальную величину угла тангажа с учетом конструктивных характеристик МВС (угол между ВПП и хвостовой частью фюзеляжа), исключающее касание хвостовой части фюзеляжа о ВПП. При этом на когнитивном взлетном индикаторе отображается команда на подъем передней стойки и доразгон до скоростей V2; V3; V4. В базе данных модуля 58 ЦБВС 13 хранятся заранее рассчитанные величины допустимых углов тангажа ϑдоп для подъема передней стоики, отрыва и набора высоты на воздушном участке взлетной дистанции в зависимости от различных конфигураций механизации крыла, располагаемых характеристик ВПП, фактического взлетного веса. При достижении фактических углов тангажа ϑ≥ϑдоп срабатывает АПСИ, выполненная со статическим и динамическим упреждением срабатывания сигнализации, которая направлена на предотвращение хвостовых ударов на разбеге, потери скорости и предотвращение сваливания на воздушном участке взлетной дистанции, а также для управления траекторией полета МВС в вертикальной плоскости. Система посредством отклонения руля высоты обеспечивает выдерживание заданного угла тангажа, рассчитанного ЦБВС 13, причем расчет угла тангажа определяется из условий обеспечения безопасности полета на взлете по предотвращению хвостовых ударов, а также с учетом оптимизации длины разбега МВС при взлете. Система также ограничивает предельные углы атаки, при приближении МВС к αдоп срабатывает предупредительная тряска штурвала, а при приближении к αкрит включается АПСИ, чтобы предотвратить сваливание в штопор. Процесс ограничения углов атаки может быть автоматизирован, например, при приближении текущего угла атаки к критическому система отклоняет руль высоты на пикирование. В данном случае автоматика не решает задачу выдерживания заданного угла тангажа, обеспечивает лишь непревышение МВС допустимого угла атаки. Граничное значение углов тангажа на взлете, в принципе, является аналогами допустимых и критических углов атаки, и в то же время - более удобным инструментом для пилотирования МВС на этапе взлета. Формат отображения системы командного управления углом тангажа приведен на Фиг.8, 9, 10.
Данная система БИСИП МВС отличается от существующих тем, что не использует показания дополнительных датчиков, например, концевых выключателей, установленных в нижней точке фюзеляжа, радиовысотомеров предельно малых высот, телевизионных камер видимого диапазона или лазерных дальномеров. Ситуационная осведомленность экипажа при взлете в СМУ вне видимости линии естественного горизонта из кабины экипажа повышается за счет применения когнитивного отображения командных директорных углов тангажа на подъем передней стойки, отрыв, доразгон до скоростей V2, V3, V4 и применения командного индекса 84 и командной планки 95(Фиг.8) и командной планки 144 и индекса 151 (Фиг.9), предназначенных для предотвращения хвостового удара, столкновения с подстилающей поверхностью после отрыва МВС и выдерживания расчетного (оптимального) профиля набора высоты на воздушном участке взлетной дистанции.
Работа система информационной поддержки экипажа по предупреждению отклонения МВС от осевой линии ВПП на разбеге
Система предназначена для контроля разбега МВС по ВПП и выдачи экипажу сигнальной информации об отклонении МВС от осевой линии ВПП на исполнительном старте и в процессе разбега до его отрыва.
Величина рассогласования отклонения МВС от ИК (МК, ОКВЗЛ) может быть  ,
,
где Δz - величина бокового отклонения центра масс МВС от осевой линии ВПП;
SПР - пройденное расстояние МВС от торца ВПП в направлении взлета;
Δψ - угол отклонения МВС от заданного направления в градусах.
Величина бокового отклонения МВС может быть определена также по выражению:
 , при условии |sin ψ|>|cos ψ| и
, при условии |sin ψ|>|cos ψ| и
 , при условии |cos ψ|>|sin ψ|.
, при условии |cos ψ|>|sin ψ|.
С учетом условий невыкатывания МВС при разбеге за пределы ВПП с вероятностью 10-9 (вероятность возникновения катастрофической ситуации на разбеге), определенных авиационными правилами (АП-25) следует, что информативная функция безопасности бокового отклонения МВС на ВПП может определяться и как:
где kZ - функция, зависящая от длины разбега и текущей скорости разбега и ее средняя величина составляет примерно 2/5 см. стр.65 [Солдаткин. В.М. Методы и средства построения бортовых информационно-управляющих систем обеспечения безопасности полета. Казань: Изд-во Казан. Гос. Техн. Ун-та, 2004 г. 350 с.].
Тогда для ВПП шириной S=55 м Δzдоп для начального участка выруливания не далее, чем 200 м от торца ВПП, оценивается величиной 5,5 м, а допустимое отклонение МВС от заданного путевого угла в момент старта определяется величиной  , где S - дистанция от начала торца ВПП в направлении взлета до местоположения МВС на исполнительном старте.
, где S - дистанция от начала торца ВПП в направлении взлета до местоположения МВС на исполнительном старте.
Величина допустимого отклонения от заданного путевого угла за три секунды перед принятием решения экипажем на продолжение или прекращения взлета не должна превышать  , где LСБАЛ - сбалансированная дистанция разбега, на которой возможно как безопасное прекращение взлета, так и безопасное продолжение взлета с градиентом набора высоты не менее установленного по требованиям безопасности на воздушном участке взлетной дистанции.
, где LСБАЛ - сбалансированная дистанция разбега, на которой возможно как безопасное прекращение взлета, так и безопасное продолжение взлета с градиентом набора высоты не менее установленного по требованиям безопасности на воздушном участке взлетной дистанции.
По предварительным оценкам точность определения бокового отклонения центра масс МВС от оси ВПП должна не превышать 5 м, а путевого угла 0,2°. Эти обстоятельства вынуждают использовать для этих целей высокоточный БПиНП 21 в комплексированном режиме работы с БМРК СНС-ССС 19.
В отличие от существующих аналогичных систем, контролирующих направление движения МВС по ВПП (курсовые системы, точные курсовые системы (ТКС), инерциальныенавигационные системы, спутниковые системы навигации), БИСИП МВС контролирует точность установки по направлению движения МВС по продольной дистанции от торца ВПП или линии смещенного старта в направлении взлета, а также точность установки МВС в направлении взлета относительно осевой линии ВПП. Для этих целей на взлетном индикаторе КИНО 3 используется когнитивный формат отображения контроля направления движения и первоначальной установки МВС на исполнительном старте, приведенный на фиг.8 (поз.74, 75, 109, 118, 119, 126), на фиг.9 (поз.130, 163, 169).
Работа системы контроля реверсов тяги двигателей
Для предотвращения выкатываний МВС за пределы ВПП на этапах взлета, приземления или ухода на второй круг, связанных с отказами системы реверса, ошибочного применения экипажем системы реверса (несвоевременного определения отказов, особенно при несимметричных отказах), возникновения необходимости блокировки включения реверса тяги, БИСИП МВС использует дополнительное информационное обеспечение по контролю реверса тяги СУ.
Система контроля реверсов тяги двигателей БИСИП МВС отличается от существующих подобных систем тем, что обеспечивает экипаж дополнительной когнитивной информацией о включении и исправности/неисправности, о необходимости блокировки реверса тяги СУ (при несимметричном одностороннем отказе реверса с визуальной и звуковой сигнализацией фиг.8 поз.98 и поз.124, фиг.9 поз 153). С целью повышения надежности информационного обеспечения экипажа по вышеназванным параметрам информация о закрытом/открытом положении замков реверсивных устройств, открытом/закрытом положении створок реверса дублируется с помощью датчиков полного давления воздушного потока, образованного реверсивными устройствами (створками, решетками).
Форматы отображения полетной информации на комплексном взлетном пилотажном индикаторе, а также на пилотажном индикаторе, расположенном на фоне лобового стекла (ИЛС) приведены на Фиг.8 и Фиг.9, а описание элементов указанных форматов отображения информации для различных режимов полета приведены в таблицах 2 и 3:
Таким образом, предложенная группа изобретений позволяет достигнуть заявленный технический результат: расширение функциональных возможностей интегрированных комплексов бортового оборудования МВС по представлению экипажу улучшенной внутрикабинной и закабинной обстановки на этапе «ВЗЛЕТ» и создание нового формата представления полетной информации для повышения ситуационной осведомленности экипажа за счет снижения уровня неопределенности при принятии решения, т.е. обеспечения экипажа полной, достоверной, актуальной, непротиворечивой и интерактивной информацией с применением принципов искусственного интеллекта и когнитивности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОСТРАНСТВЕННОЙ ИНФОРМАЦИИ | 2016 |
|
RU2619049C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ | 2019 |
|
RU2729891C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ ТРАЕКТОРИИ ВЗЛЕТА И ПРОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА НАД ВЫСОТНЫМ ПРЕПЯТСТВИЕМ | 2022 |
|
RU2798591C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| УСТРОЙСТВО СИНТЕЗА КАРТОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2004 |
|
RU2250182C1 |
| АВТОМАТИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА ПЕРЕДАЧИ МЕТЕОРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК АЭРОДРОМА И ВВОДА ИХ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2012 |
|
RU2519622C2 |
| Способ управления беспилотным летательным аппаратом | 2019 |
|
RU2729905C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
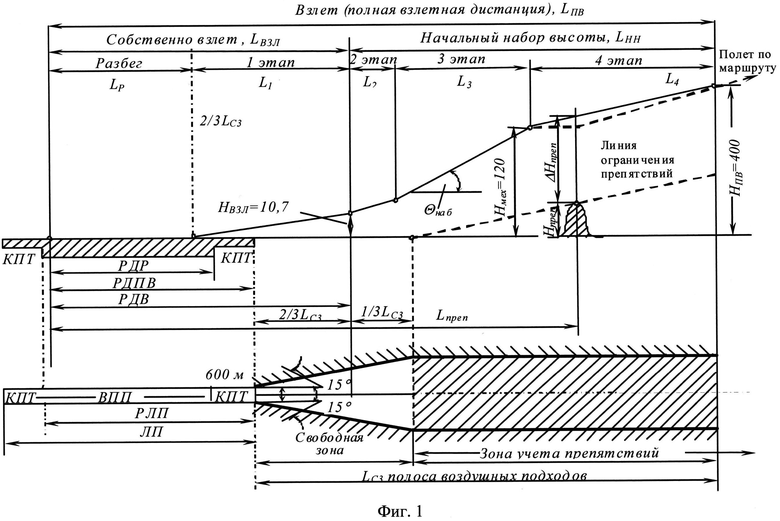
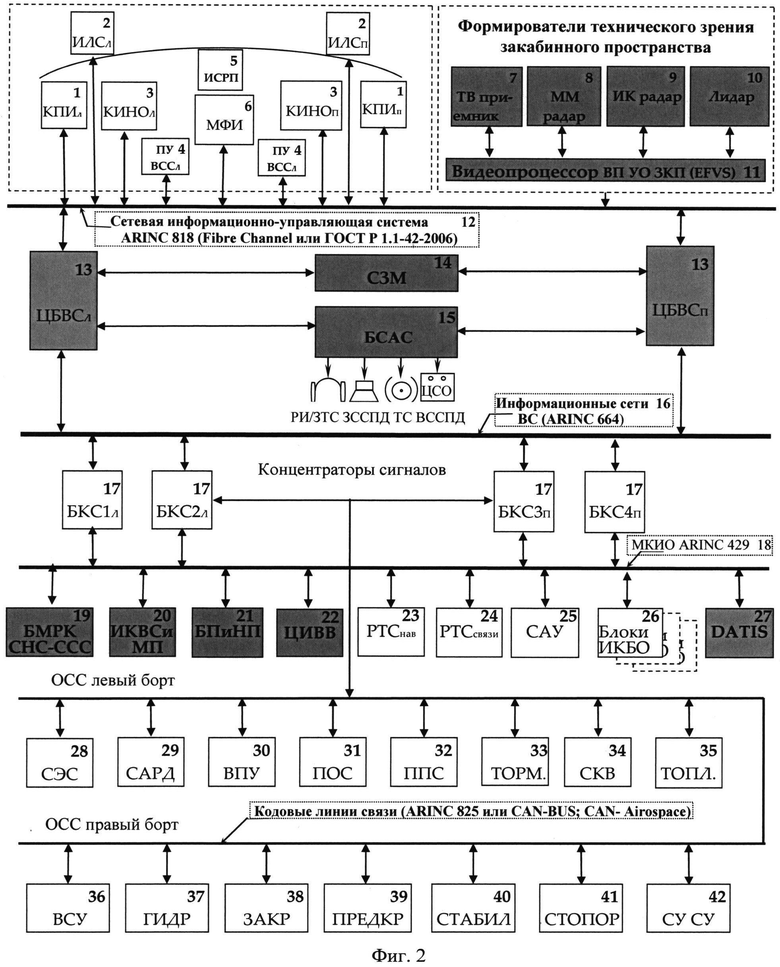
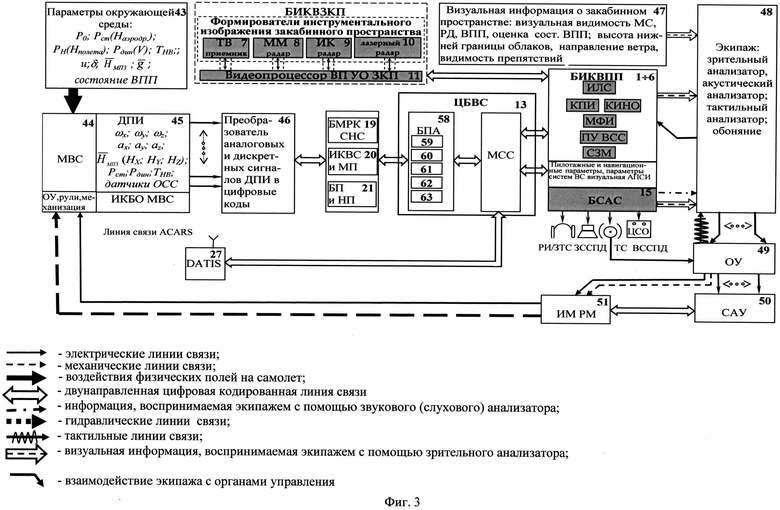
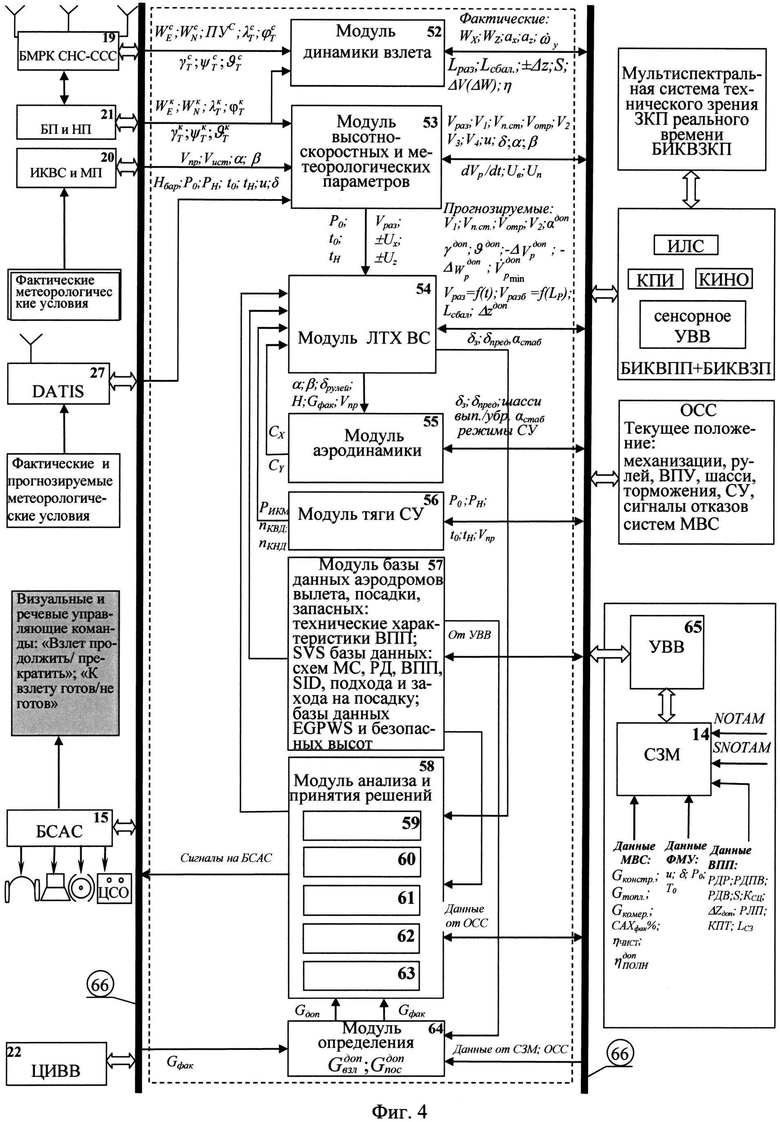
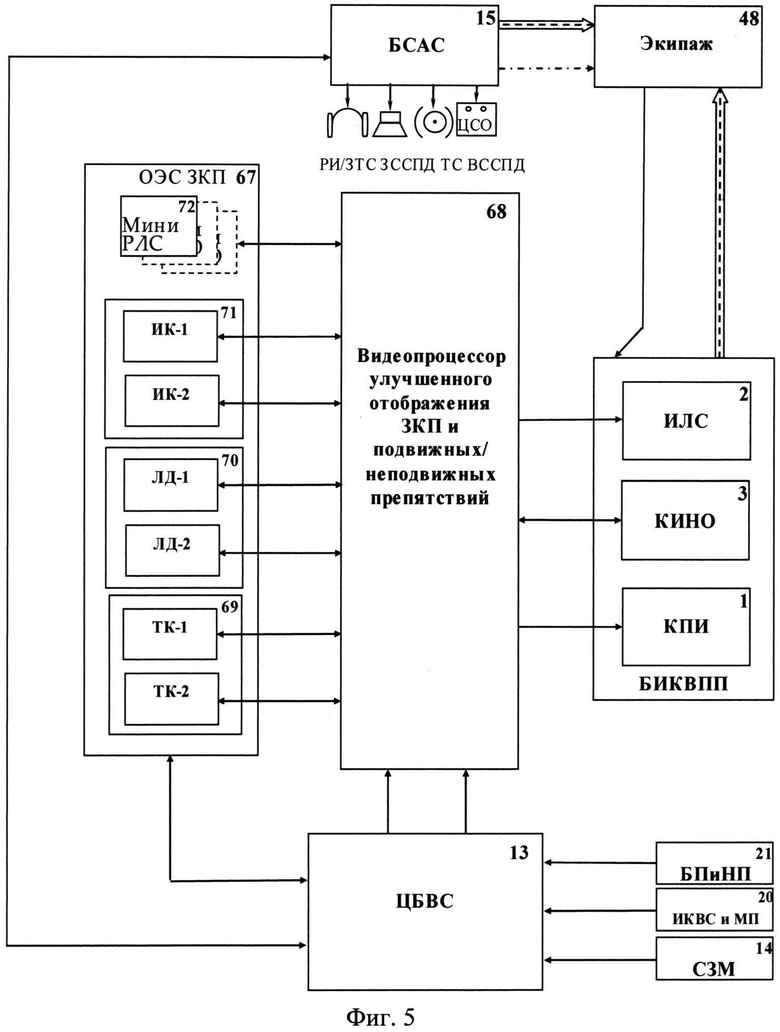
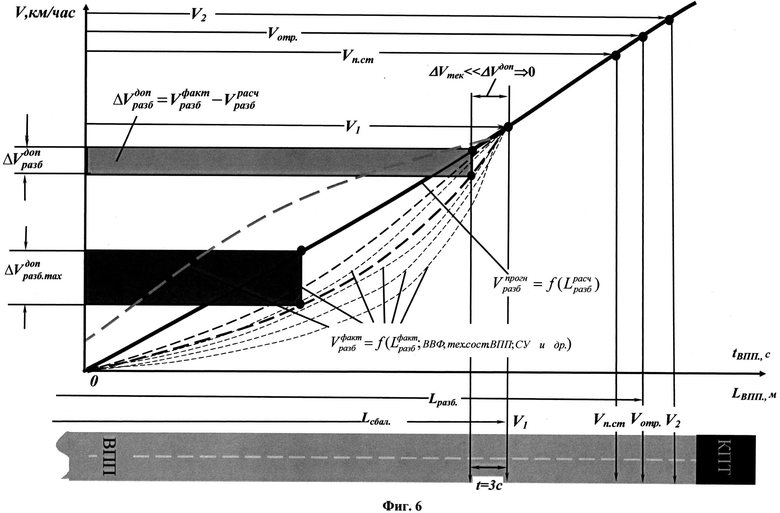
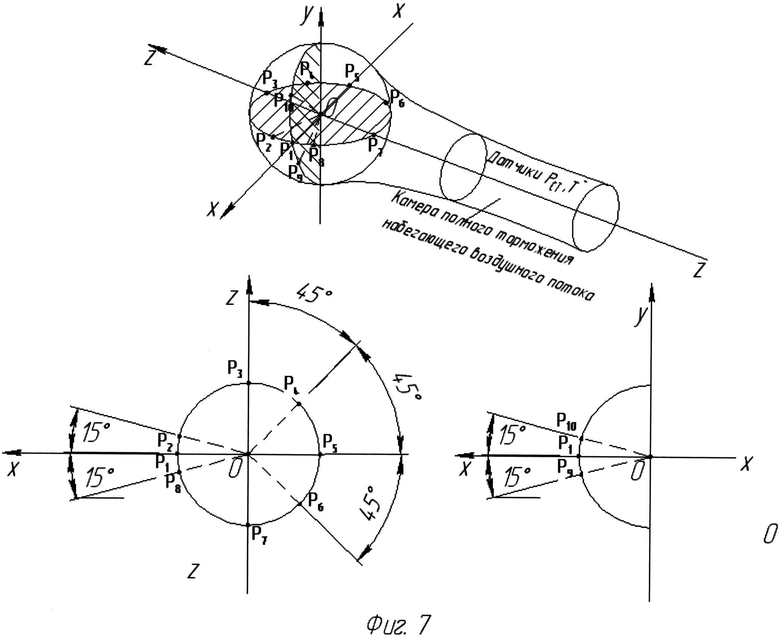
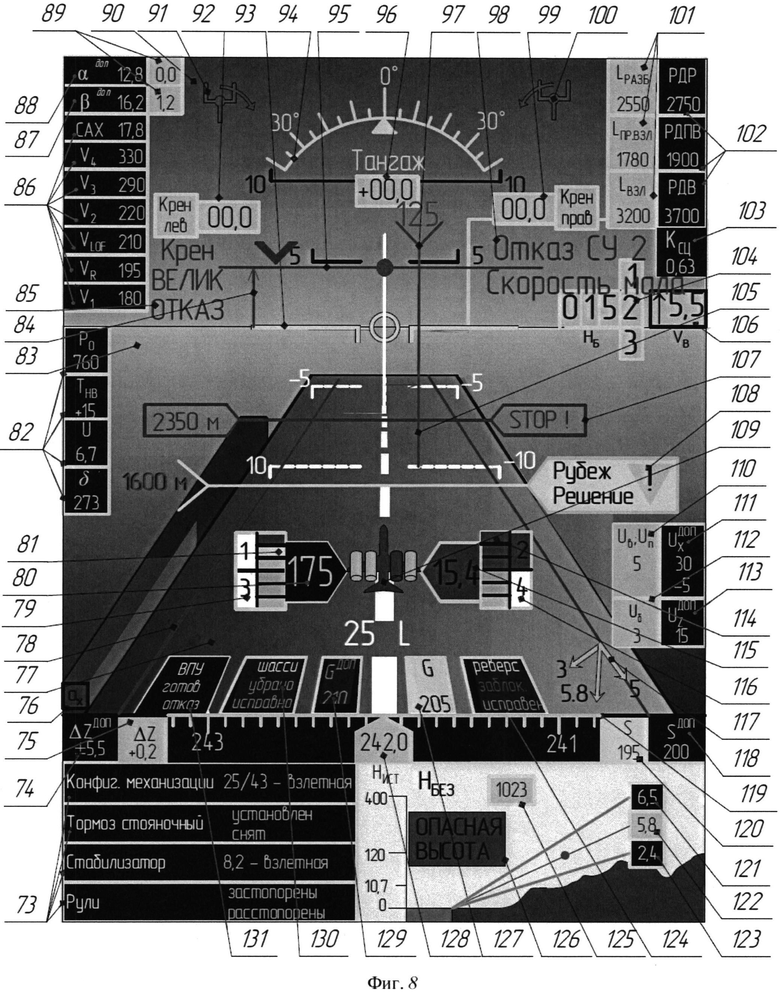
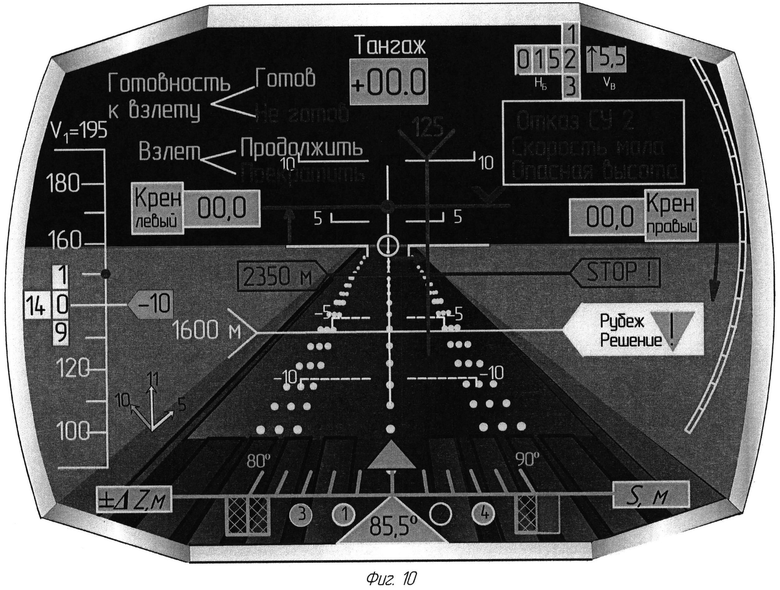
Группа изобретений относится к автономным цифровым интегрированным комплексам бортового электронного оборудования многодвигательных воздушных судов. Бортовая система информационной поддержки содержит модуль динамики взлета, модуль высотно-скоростных и метеорологических параметров, модуль летно-технических характеристик, модуль аэродинамики, модуль тяги силовых установок, модуль базы данных аэродромов и мировую базу данных рельефа подстилающей поверхности EGPWS повышенной точности в 3D формате и минимальных безопасных высот, модуль анализа и принятия решений и другие модули. В предлагаемом когнитивном формате представления информации на взлетном пилотажном индикаторе выполнены синтезированное отображение взлетно-посадочной полосы с осевой линией, номером порога взлетно-посадочной полосы, отображение границ максимально допустимого бокового отклонения судна на разбеге, другие важные отображения. На пилотажном индикаторе на фоне лобового стекла дополнительно отображены команды на подъем передней стойки, отрыв, доразгона судна до безопасных скоростей набора высоты и команды на выдерживание оптимального угла тангажа на воздушном участке взлетной дистанции, а также команды на отворот и экстренный набор высоты для предотвращения столкновения с рельефом подстилающей поверхности и искусственными препятствиями. Форматы указанных параметров отображены с использованием принципов активации визуального восприятия информации в информационной поддержке экипажа в его когнитивной деятельности с использованием принципов искусственного интеллекта, полноты представления информации, актуальности и интерактивности. В результате упрощается управление летательным аппаратом, повышается безопасность полетов. 2 н. и 18 з.п. ф-лы, 10 ил., 3 табл.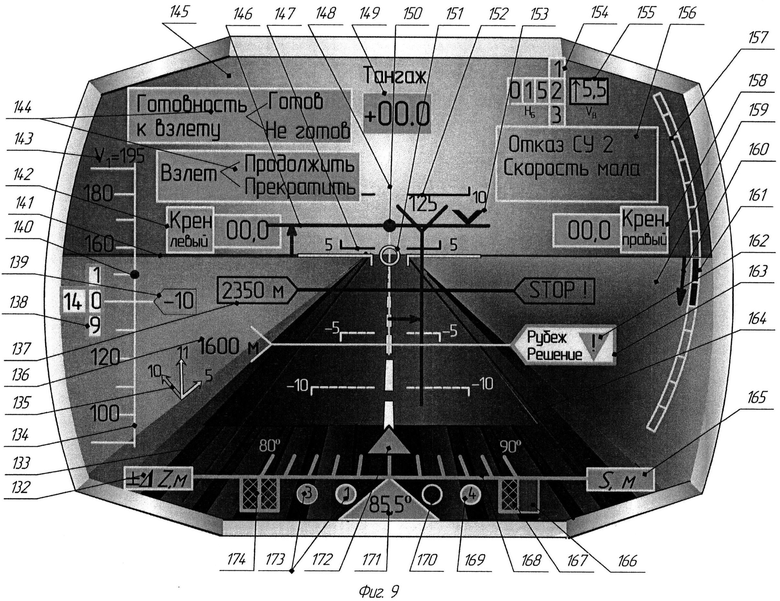
1. Бортовая интегрированная система информационной поддержки экипажа на этапе «Взлет» многодвигательного воздушного судна, содержащая технические средства визуализации пилотажных и навигационных параметров полета, параметров силовых установок и систем судна, систему визуализации параметров подстилающей поверхности окружающей среды закабинного пространства, многофункциональные пульты управления вычислительными системами судна, расположенные на приборных досках кабины экипажа, и пилотажный индикатор, расположенный на фоне лобового стекла кабины экипажа, электронные измерительно-вычислительные системы определения пилотажных и навигационных параметров, приемное устройство спутниковой навигационной системы, системы контроля параметров технического состояния силовых установок и систем судна, технические средства мониторинга параметров динамики разбега, внешних воздействующих факторов окружающей среды, а также определения фактического взлетного веса судна, систему контроля взлетной конфигурации судна, систему аварийно-предупреждающей сигнализации, систему определения текущего местоположения судна на взлетно-посадочной полосе в процессе разбега, прогнозируемых взлетных скоростей и прогнозируемого местоположения, формирующую управляющие команды на продолжение или прекращение взлета, а также цифровую бортовую вычислительную систему, связанную с помощью мультиплексного цифрового канала информационного обмена с вышеназванными системами судна, отличающаяся тем, что цифровая бортовая вычислительная система дополнительно содержит вычислительный модуль динамики взлета, модуль высотно-скоростных и метеорологических параметров, модуль летно-технических характеристик, модуль аэродинамики, модуль тяги силовых установок, модуль базы данных аэродромов и мировую базу данных рельефа подстилающей поверхности EGPWS повышенной точности в 3D формате и минимальных безопасных высот, модуль анализа и принятия решений, модуль определения максимально допустимых взлетно-посадочных весов, а также множество баз данных, базу знаний экспертно-советующей системы, технические средства визуализации пилотажных и навигационных параметров полета выполнены в виде бортовой автономной интегрированной системы визуализации параметров полета с интеллектуальной поддержкой когнитивной деятельности экипажа, система визуализации подстилающей поверхности окружающей среды закабинного пространства на малых высотах представляет собой автономную бортовую интегрированную мультиспектральную систему визуализации параметров закабинной обстановки, функционирующую в реальном режиме времени, независимо от времени года и суток, независимо от фактических метеорологических условий окружающей среды и независимо от технического состояния покрытия подстилающей поверхности, а система визуализации подстилающей поверхности окружающей среды закабинного пространства на больших высотах выполнена в виде аппаратно-программного комплекса синтезированной системы визуализации объемного рельефа подстилающей поверхности закабинного пространства с реализацией функции предупреждения столкновения судна с подстилающей поверхностью с использованием алгоритма «ВПЕРЕДСМОТРЯЩЕГО», функционирующей в реальном режиме времени, система контроля взлетной конфигурации судна выполнена в виде системы контроля взлетной конфигурации судна, предупреждающая взлет судна с конфигурацией механизации крыла и стабилизатора, несоответствующей требованиям РЛЭ (руководства по летной эксплуатации), подторможенных пневматиках тормозных колес шасси, на стояночном тормозе, с застопоренными рулями и элеронами, недостаточной тяге двигателей, недостаточном темпе роста скорости, опасных воздействиях внешних факторов, неправильной установке судна на исполнительном старте, с превышением взлетного веса установленных ограничений, бортовая система аварийно-предупреждающей сигнализации представляет собой высокоинтегрированную интеллектуальную систему информационной поддержки экипажа в его когнитивной деятельности, содержащую источники визуальной когнитивной сигнализации в виде цифровых счетчиков-сигнализаторов, всплывающих текстовых сообщений, маркеров и индексов, тактильной сигнализации в виде вибраторов штурвала и тормозных педалей с выдачей экипажу управляющих речевых команд и речевые подсказки по предупреждению авиационных происшествий и серьезных инцидентов.
2. Бортовая интегрированная система по п.1, отличающаяся тем, что приемное устройство спутниковой навигационной системы представляет собой бортовой многофункциональный радиотехнический комплекс спутниковой навигационной системы и спутниковой системы связи, содержащий приемные устройства спутниковых навигационных систем, спутниковых систем связи, включая Интернет, вычислитель, антенный пост, состоящий, по крайней мере, из трех приемных антенн, размещенных вдоль фюзеляжа и на крыльях судна, а также систему с базой данных картографической информации.
3. Бортовая интегрированная система по п.1, отличающаяся тем, что она дополнительно содержит информационный комплекс определения высотно-скоростных и метеорологических параметров окружающей среды, включающий многоканальный панорамный приемник воздушных давлений набегающего воздушного потока, содержащий камеру полного торможения воздушного потока с датчиками статического давления воздушного потока и температуры заторможенного потока воздуха, при этом приемные отверстия полного давления панорамного приемника посредством пневмопроводов соединены с электронным блоком, содержащим датчики полного давления и вычислитель для определения полного набора аэрометрических параметров судна.
4. Бортовая интегрированная система по п.1, отличающаяся тем, что система определения текущего местоположения судна на всех этапах взлета, в том числе на взлетно-посадочной полосе в процессе разбега, прогнозируемых взлетных скоростей и прогнозируемого местоположения на всех этапах взлета, определения параметров динамики взлета судна и его пространственного положения выполнена в виде электронной измерительно-вычислительной системы определения пилотажных и навигационных параметров и дополнительно содержит датчики угловых ускорений связанных осей воздушного судна и микромеханические датчики кажущихся ускорений и угловых скоростей, установленные на гранях усеченной шестиугольной пирамиды, которая монтируется в базовой системе координат судна.
5. Бортовая интегрированная система по п.1, отличающаяся тем, что система определения фактического взлетного веса судна представляет собой цифровой измеритель фактического взлетного веса и центровки и содержит датчики силы, давления, перемещения, лазерные дальномеры и вычислитель расчета взлетного веса с повышенной точностью.
6. Бортовая интегрированная система по п.1, отличающаяся тем, что она дополнительно содержит цифровой преобразователь синтезированной речевой метеорологической информации в символьный графический вид в реальном режиме времени.
7. Бортовая интегрированная система по п.1, отличающаяся тем, что она дополнительно содержит съемный загрузочный модуль, содержащий цифровой вычислитель, клавиатуру для ввода исходных переменных величин и контрольный модуль для исключения ошибочного ввода исходных данных и предотвращения ошибочных расчетов взлетных параметров судна.
8. Бортовая интегрированная система по п.1, отличающаяся тем, что она дополнительно содержит оптико-электронную систему для предупреждения столкновения судна с подвижными и неподвижными препятствиями и контроля положения судна на земле относительно осевых линий рулежных дорожек, взлетно-посадочной полосы и мест стоянок.
9. Бортовая интегрированная система по п. 1, отличающаяся тем, что автономная бортовая интегрированная мультиспектральная система визуализации закабинной обстановки содержит мультиспектральные датчики различного физического принципа действия и вычислитель комплексирования видеоизображений от указанных датчиков.
10. Бортовая интегрированная система по п.9, отличающаяся тем, что датчиками различного физического принципа действия являются телевизионные приемники, радиолокаторы миллиметрового диапазона волн, инфракрасные радары, лазерные дальномеры, микрорадары.
11. Бортовая интегрированная система по п.1, отличающаяся тем, что система контроля взлетной конфигурации судна выполнена с возможностью контроля установки механизации крыла и оперения во взлетную конфигурацию и содержит систему раннего предупреждения по предотвращению столкновений с рельефом местности и искусственными препятствиями на воздушном участке взлетной дистанции, систему предупреждения об опасных режимах набора высоты, систему по командному управлению углами тангажа и предупреждения хвостовых ударов при разбеге, систему контроля торможения основных пневматиков и их целостности и состояния шасси, систему предупреждения взлета с застопоренными рулями и элеронами, систему предупреждения включения реверса тяги двигателей при их отказе и одностороннем отказе, систему по предупреждению столкновения с препятствиями на этапах взлета, горизонтального полета и снижения с директорными режимами по обходу препятствий, систему по предупреждению отклонения судна от осевой линии взлетно-посадочной полосы при разбеге.
12. Бортовая интегрированная система по п.1, отличающаяся тем, что система определения текущего местоположения судна на взлетно-посадочной полосе в процессе разбега выполнена в виде электронного измерительно-вычислительного блока определения параметров пространственного положения и навигационных параметров, дополнительно определяющего фактические и прогнозируемые параметры траектории набора высоты на воздушном участке взлетной дистанции.
13. Когнитивный формат представления полетной информации на этапе «Взлет» многодвигательного воздушного судна, содержащий формат представления экипажу полной, достоверной, актуальной, интерактивной и интеллектуальной информации о пилотажных, навигационных параметрах, параметрах силовых установок и систем судна, параметрах внешних воздействующих факторов, параметрах окружающей среды закабинного пространства, отличающийся тем, что на взлетном пилотажном индикаторе дополнительно представлены подвижное синтезированное отображение взлетно-посадочной полосы с осевой линией, номером ее порога, отображение границ максимально допустимого бокового отклонения судна на разбеге, неподвижное символьное отображение судна, наложенное на синтезированное отображение мест стоянок, рулежных дорожек, взлетно-посадочной полосы, слева и справа от которого расположены когнитивные цифровые счетчики потребной и фактической скорости разбега, цифровые счетчики-сигнализаторы величины рассогласования прогнозируемой и фактической скорости разбега судна, а также когнитивные сигнализаторы с информацией о тяге двигателей в текущий момент времени, информационные окна с всплывающими когнитивными текстовыми сообщениями о готовности/неготовности судна к взлету, необходимости продолжения или прекращения взлета, информационные окна систем мониторинга шасси, максимально допустимого взлетного веса, реверса тяги двигателей, фактического ветра, взлетно-посадочных устройств, конфигурации механизации крыла и стабилизатора, системы торможения, стопорения рулей и элеронов, параметры пространственного положения с цифровыми счетчиками-сигнализаторами углов крена и тангажа, а также параметры динамики разбега судна по взлетно-посадочной полосе, а на пилотажном индикаторе на фоне лобового стекла дополнительно представлены команды на подъем передней стойки шасси, на отрыв и доразгон судна до безопасных скоростей набора высоты, команды на выдерживание оптимального угла тангажа на воздушном участке взлетной дистанции, а также команды на отворот и/или экстренный набор высоты для предотвращения столкновения с рельефом подстилающей поверхности и искусственными препятствиями, при этом визуальная поддержка когнитивной деятельности экипажа реализуется за счет создания формата отображения полетной информации с использованием принципов активизации визуального восприятия информации, который сводит к минимуму необходимость переноса взгляда с закабинного пространства на внутрикабинные индикаторы, создания более благоприятных условий по пилотированию многодвигательного воздушного судна на взлете, напоминающих взлет судна в простых метеорологических условиях путем сокращения числа умственных операций, исключения нецелесообразных операций по управлению судном, представления экипажу полной, актуальной, интерактивной информации и ликвидации зон неопределенности при принятии решения по штурвальному управлению судном, а на комплексном индикаторе навигационной обстановки после достижения судном высоты 400 м экипажу дополнительно представлены отображение вертикального профиля траектории набора высоты, отображение рельефа подстилающей поверхности, на которое наложены схемы SID, а также фактическое местоположение судна в горизонтальной плоскости, его путевая скорость, текущий курс, боковое отклонение от заданной траектории полета, командный курс для вывода судна на заданную воздушную трассу, когнитивные счетчики-сигнализаторы минимальных безопасных высот, отображение характера рельефа местности впереди судна на удалении не менее 40 морских миль в пределах ширины коридора воздушной трассы, установленной правилами полета с сигнализаторами опасной высоты в направлении полета и когнитивными командными планками по выполнению маневра для предотвращения столкновения с препятствиями.
14. Когнитивный формат представления полетной информации по п.13, отличающийся тем, что на этапе предполетной подготовки на взлетном пилотажном индикаторе дополнительно отображены цифровые счетчики фактических технических параметров взлетно-посадочной полосы, фактических параметров окружающей среды, допустимых в эксплуатации углов атаки и скольжения, допустимых продольной и боковой составляющих скорости ветра относительно осевой линии взлетно-посадочной полосы, максимально допустимого взлетного веса, расчетных взлетных скоростей, потребных полного и чистого градиентов набора высоты, а также когнитивные цифровые счетчики-сигнализаторы потребных параметров взлетно-посадочной полосы для ожидаемых условий взлета, потребных продольной и боковой составляющих скорости ветра, фактического взлетного веса, фактических углов атаки и скольжения, наложенные на синтезированные отображения мест стоянки судна на перроне аэродрома с указанием его местоположения, рулежных дорожек и взлетно-посадочной полосы.
15. Когнитивный формат представления полетной информации по п.13, отличающийся тем, что на этапе выруливания и руления на взлетном пилотажном индикаторе дополнительно отображены конфигурация механизации крыла и стабилизатора, положение рулей, стояночного тормоза, конфигурации управления передней стойкой шасси и основных стоек шасси, состояние пневматиков шасси, информации о курсе, информации о скорости и направлении ветра, состоянии силовых установок и систем судна с использованием когнитивной графики, а на синтезированное отображение мест стоянок, рулежных дорожек и взлетно-посадочной полосы накладывается графическое изображение многодвигательного воздушного судна для контроля местоположения судна относительно линии разметок мест стоянок, рулежных дорожек и осевой линии взлетно-посадочной полосы и всплывающие текстовые сообщения о наличии подвижных и неподвижных препятствий и опасной скорости сближения с ними в пространстве, окружающем судно при его стоянке и движении.
16. Когнитивный формат представления полетной информации по п.13, отличающийся тем, что на этапе занятия исполнительного старта на взлетном пилотажном индикаторе дополнительно отображены цифровые когнитивные счетчики-сигнализаторы углов крена и тангажа, директорный угол тангажа на подъем передней стойки, цифровые счетчики-сигнализаторы фактической скорости разбега, цифровой счетчик потребной скорости разбега в зависимости от длины разбега или времени разбега, цифровой счетчик-сигнализатор величины рассогласования между фактической и потребной скоростями разбега, цифровые счетчики-сигнализаторы продольной дистанции местоположения судна от торца взлетно-посадочной полосы в направлении взлета и цифровой счетчик-сигнализатор бокового отклонения судна от осевой линии взлетно-посадочной полосы, когнитивные текстовые сообщения о готовности/неготовности судна к взлету.
17. Когнитивный формат представления полетной информации по п.13, отличающийся тем, что на этапе разбега на взлетном пилотажном индикаторе дополнительно отображены когнитивные индикаторы, предназначенные для контроля тяги силовых установок на соответствие требованиям руководства по летной эксплуатации, границы максимально допустимых отклонений судна от осевой линии взлетно-посадочной полосы, сбалансированная дистанция продолженного/прекращенного взлета с зоной отображения текстовых сообщений по принятию решения на продолжение/прекращение взлета, директорные углы тангажа на отрыв и доразгона судна до скоростей V2, V3, V4, всплывающий символ, предупреждающий экипаж об опасности хвостового удара, и когнитивный сигнализатор величины рассогласования между расчетной и фактической скоростями разбега с текстовым сообщением «РУБЕЖ. РЕШЕНИЕ!» в сочетании с когнитивным мнемознаком величины рассогласования фактической и прогнозируемой скорости разбега, всплывающие когнитивные текстовые сообщения «ВЗЛЕТ ПРОДОЛЖИТЬ/ПРЕКРАТИТЬ».
18. Когнитивный формат представления полетной информации по п.13, отличающийся тем, что отображение параметров пространственного положения судна либо представляет собой макет судна, вращающийся по крену на фоне неподвижной линии горизонта и на фоне подвижной линии, разделяющей «пространство-небо» и «плоскость земли», при этом направление вращения органов управления соответствует направлению вращения макета и самого судна как по темпу, так и по соразмерности, либо используется отображение пространственного положения судна как «вид на линию горизонта из кабины экипажа» в сочетании с использованием командных индексов для безошибочного вывода судна экипажем из любого пространственного положения в плоскость горизонта.
19. Когнитивный формат представления полетной информации по п.13, отличающийся тем, что на воздушном участке взлетной дистанции на взлетном пилотажном индикаторе дополнительно отображены директорный угол тангажа для оптимального безопасного набора высоты, директорные углы крена, тангажа и курса для выполнения маневров по предупреждению столкновения с рельефом или искусственными препятствиями, цифровые счетчики-сигнализаторы фактического градиента набора высоты, фактических углов атаки и скольжения, а также траектория набора высоты в вертикальной плоскости, цифровой счетчик-сигнализатор безопасной высоты полета с выводом текстового сообщения о приближении судна к опасной высоте, наложенные на синтезированное отображение рельефа местности.
20. Когнитивный формат представления полетной информации по п.13, отличающийся тем, что на пилотажном индикаторе на фоне лобового стекла параметрическая и сигнальная информация на малых высотах накладывается на видеоизображение подстилающей поверхности закабинного пространства, а на больших высотах - на синтезированное отображение подстилающей поверхности.
| БОРТОВАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА | 2010 |
|
RU2439584C1 |
| СИСТЕМА КОНТРОЛЯ ВЗЛЕТА ИЛИ ПОСАДКИ САМОЛЕТА | 2001 |
|
RU2192368C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

