Настоящее устройство относится к транспортным системам автоматизированного склада.
Из предшествующего уровня техники известна транспортная складская система, содержащая перегрузочную тележку с подъемно-опускной кареткой, имеющей грузонесущую опору, горизонтальные направляющие для катков перегрузочной тележки и приемные столы для грузов, расположенные по концам упомянутых направляющих и имеющие проемы между грузонесущими элементами для размещения в них грузонесущей опоры при вертикальном перемещении каретки, снабженная дополнительными направляющими, размещенными перпендикулярно основным, а подъемно-опускная каретка снабжена катками для опирания на дополнительные направляющие, при этом привод вертикального перемещения упомянутой каретки содержит по крайней мере один домкрат, соединенный с рамой каретки и тележки с возможностью их взаимного перемещения относительно друг друга и направляющих с размещением грузонесущей опоры каретки на разной высоте относительно упомянутых направляющих. Авторское свидетельство №1713855, B65G 1/02, B61J 1/10.
Известны транспортные складские системы, состоящие из роликовых конвейеров расположенных на торцевой части стеллажей. См. Группа компаний БелСКС г. Минск, info@belsks.by.
Недостатком указанных конструкций транспортной системы является то, что они занимают большие площади складских помещений, трудоемкие в изготовлении, дорогие по стоимости, и в случае выхода из строя одного из элементов системы парализует работу всего склада.
Задача, на решение которой направлено заявленное техническое решение, заключается в упрощении транспортной складской системы и расширения технологических возможностей.
Данная задача достигается за счет того, что столы для приема и выдачи грузов перемещаются по направляющим, расположенным под углом к рельсовым путям штабелера.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является упрощение транспортной складской системы за счет отсутствия конвейеров и других транспортирующих устройств, что дает возможность значительно расширить технологические возможности работы склада.
Изобретение поясняется чертежами.
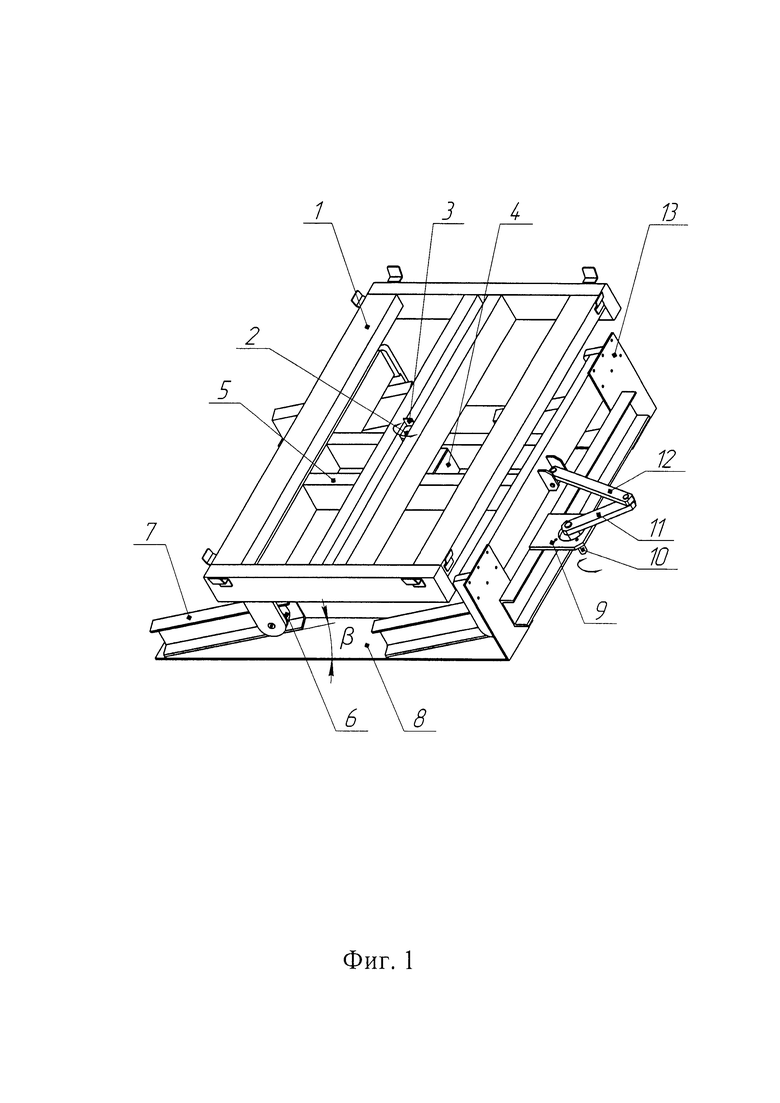
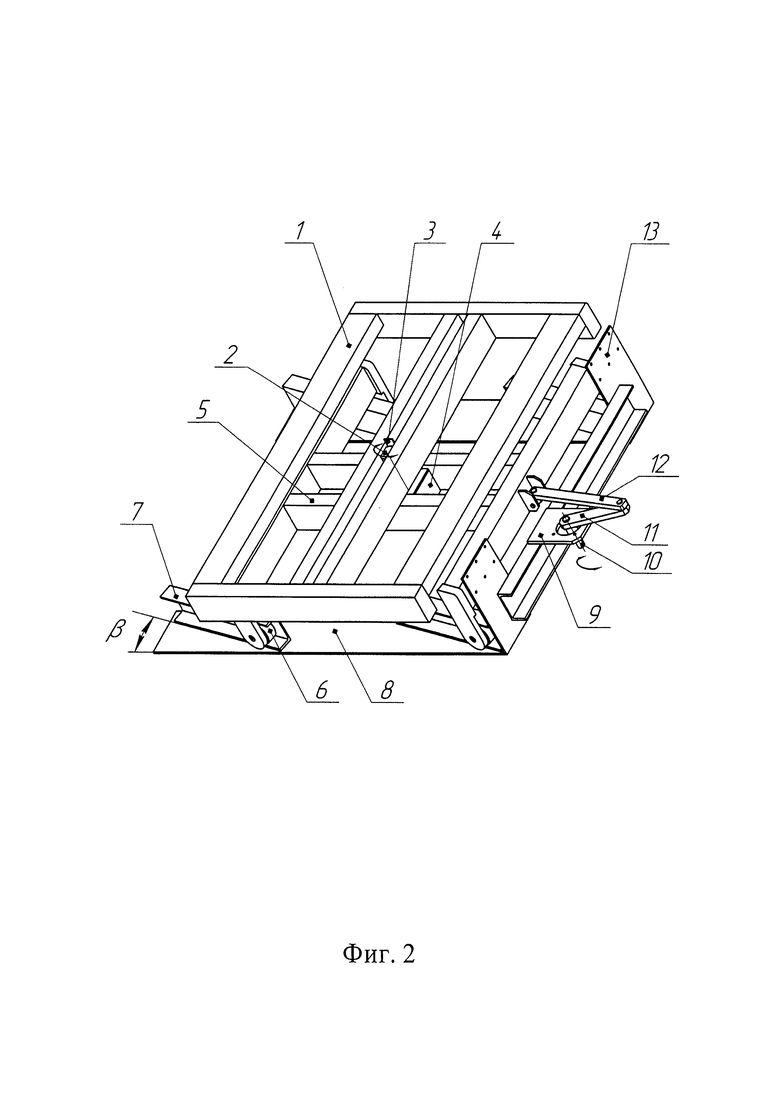
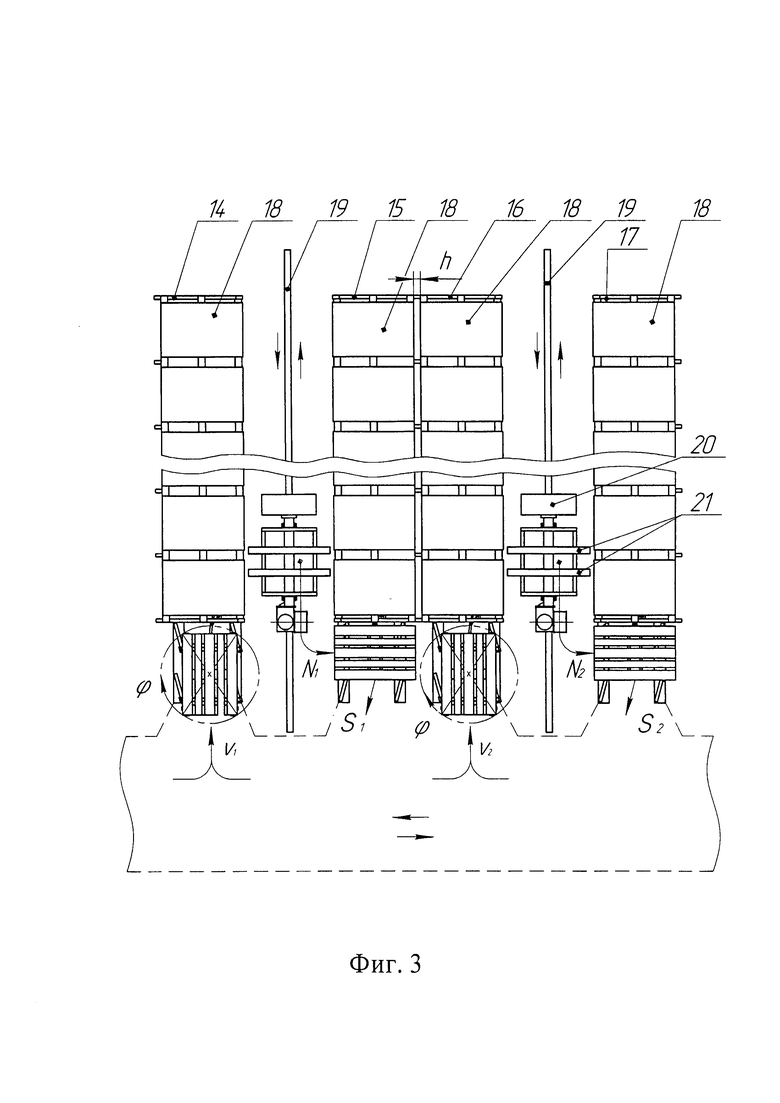
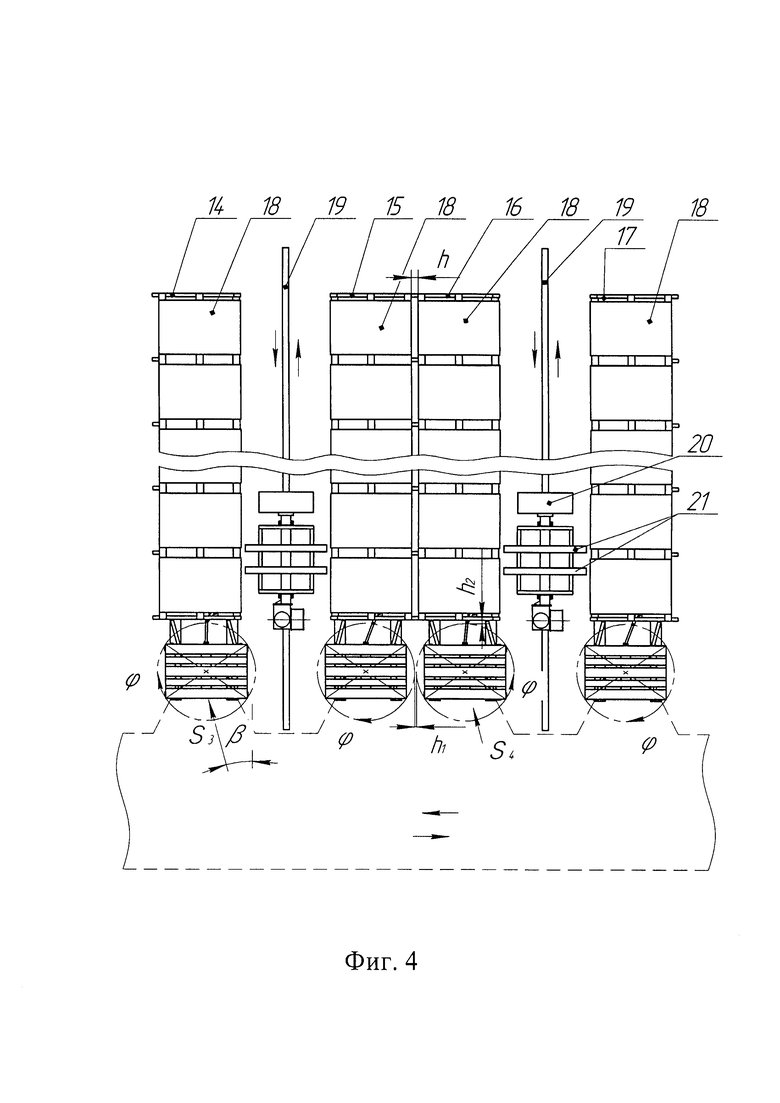
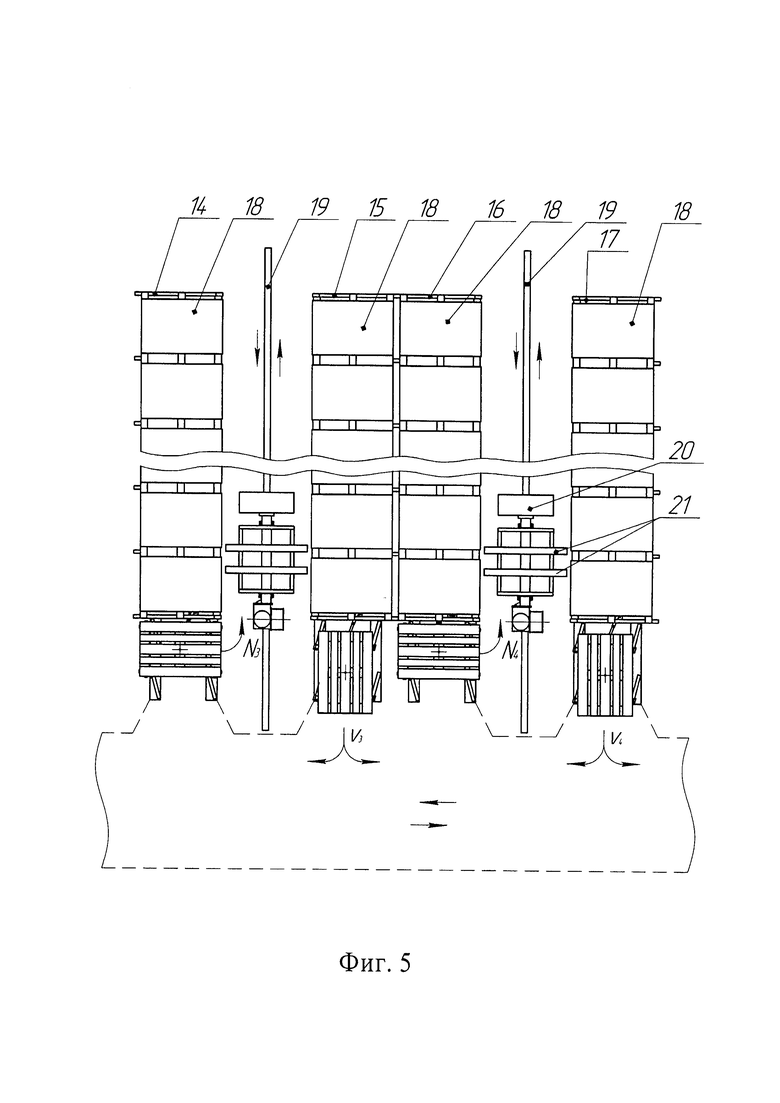
На Фиг. 1 в изометрии изображен стол для приема груза, на Фиг. 2 в изометрии - стол для выдачи груза, на Фиг. 3 - план изначального положения столов при приеме грузов, Фиг. 4 - план промежуточного положения столов, Фиг. 5 - план положения столов при выдачи грузов.
Стол приема и стол выдачи груза (см. Фиг. 1, Фиг. 2) состоит из поворотной грузовой платформы 1, выполненной в виде рамы, размеры которой в плане соответствуют размерам двухзаходного однонастильного поддона, а в центре рамы 1 неподвижно закреплен приводной вал 2, рядом с которым установлен выступающий подпружиненный стержень 3 для воздействия на датчик определения наличия или отсутствия поддона с грузом (датчик условно не показан). Приводной вал 2 грузовой платформы 1 установлен в подшипниковую опору 4, расположенную по центру тележки 5 рамной конструкции, роликовые опоры 6 которой установлены в направляющих 7, закрепленных на плите 8 под углом β, при этом привод вала 2 (условно не показан) закреплен к подшипниковой опоре 2 в нижней ее части. На плите 9 расположен привод с осью 10 и рычагом 11 (привод условно не показан). Штанга 12 шарнирно закреплена с рычагом 11 и рамой тележки 5. Пластина 13 служит для крепления плиты 8 с направляющими 7 к торцовой раме стеллажа в нижней ее части (см. Фиг. 3, Фиг. 4, Фиг. 5). Между стеллажами 14 и 15, 16 и 17, в ячейках которых расположены поддоны с грузом 18, по рельсовым путям 19 перемещаются роботизированные штабелеры 20 с вилочными телескопическими захватами 21, при этом стеллажи 15 и 16 закреплены с учетом минимального допускаемого зазора h между поддонами с грузом 18.
Транспортная складская система работает следующим образом.
Изначально столы для приема и выдачи груза занимают положение (см. Фиг. 3), где для наглядности на столах установлены поддоны (груз условно не показан). Поддоны с грузом, с помощью автоэлектропогрузчиков или ручных гидравлических грузовых тележек, доставляются по направлению V1, V2 и устанавливаются на поворотные платформы столов приема грузов, воздействуя через утопающий подпружиненный стержень на датчик, сигнализирующий о наличии груза на столе, при этом штабелеры 20 из заданных оператором ячеек стеллажей 14 и 15 или 16 и 17 с помощью телескопического захвата 21 доставляют груз на столы выдачи груза по направлению N1, N2 по заданной программе, во избежание столкновения телескопического захвата с поворотной платформой, занимают место между стеллажами, после чего поворотные платформы столов приема груза поворачиваются на угол ϕ, равный девяносто градусов, а столы выдачи грузов перемещаются по направляющим 7, расположенным под углом β, на величину S1, S2 достаточную для образования минимальных допустимых зазоров h1 и h2 (Фиг. 4) при вращении поворотных платформ столов для приема и выдачи грузов, расположенных на торцах спаренных стеллажей 15 и 16. Далее столы приема грузов перемещаются по направлению S3 и S4, а поворотные платформы столов выдачи грузов поворачиваются на угол ϕ, равный девяносто градусов, после чего столы приема и выдачи грузов занимают положение, как показано на Фиг. 5, где по направлению V3 и V4 груз, с помощью автоэлектропогрузчиков или ручных гидравлических грузовых тележек, доставляется на распределительные столы или непосредственно на автотранспорт, а штабелеры 20 с помощью телескопических захватов 21 со столов приема груза доставляют груз по направлению N3 и N4 в ячейки стеллажей по программе, заданной оператором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Транспортно-складская система | 1988 |
|
SU1763327A1 |
| Склад для хранения длинномеров | 1989 |
|
SU1698149A1 |
| Кран-штабелер для длинномерных грузов | 1973 |
|
SU486983A1 |
| АВТОМАТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1992 |
|
RU2045384C1 |
| Механизированный склад | 1989 |
|
SU1689231A1 |
| Автоматизированный склад для хранения пакетированных грузов | 1973 |
|
SU591360A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| ПОДВЕСНОЕ ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО | 1992 |
|
RU2076841C1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
Изобретение относится к транспортным системам автоматизированного склада. Система содержит столы для приема и выдачи груза, расположенные на торцевой нижней части стеллажей, перемещающиеся по направляющим. Направляющие расположены под углом к рельсовым путям штабелера. Изобретение обеспечивает упрощение конструкции, повышение надежности и производительности. 5 ил.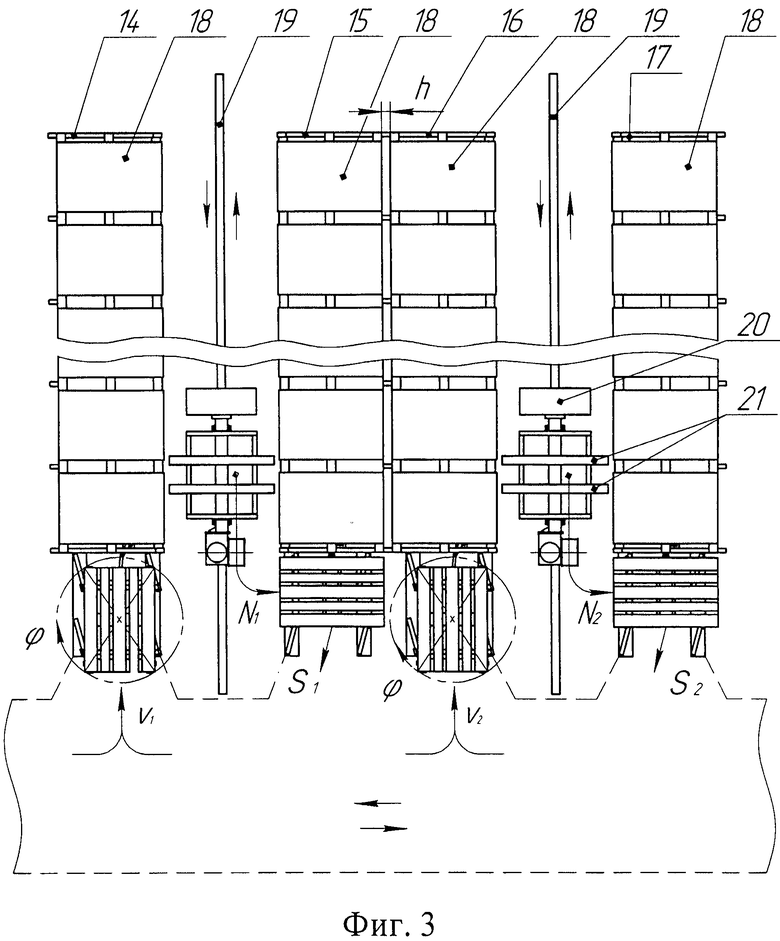
Транспортная складская система автоматизированного склада, содержащая высотные фронтальные стеллажи, в ячейках которых размещены двухзаходные однонастильные поддоны с грузом, роботизированные штабелеры, перемещающиеся между стеллажами по рельсовым путям, и столы для приема и выдачи груза, расположенные на торцевой нижней части стеллажей, отличающаяся тем, что, с целью упрощения транспортной складской системы и расширения технологических возможностей, столы для приема и выдачи грузов перемещаются по направляющим, расположенным под углом к рельсовым путям штабелера.
| JP S6317703 A, 25.01.1988 | |||
| JP 2005255396 A, 22.09.2005 | |||
| US 5152655 A1, 06.10.1992 | |||
| US 3526327 A1, 01.09.1970 | |||
| СИСТЕМА ДЛЯ ВРЕМЕННОГО ХРАНЕНИЯ ВЕЩЕЙ, В ЧАСТНОСТИ ПРЕДМЕТОВ БАГАЖА | 2004 |
|
RU2381976C2 |

