Изобретение относится к радиолокации, может быть использовано при создании ложных путей перемещения техники и разработке тренажеров для обучения личного состава радиолокационных станций.
Известно устройство для имитации отраженного от движущейся цели сигнала импульсной доплеровской радиолокационной станции (заявка ФРГ №2616770, 1978 г., МПК G01S 7/40). Устройство имитации отраженного от движущейся цели сигнала доплеровской радиолокационной станции на основе подлинного или имитированного сигнала отраженного от неподвижной цели. Имитированный сигнал, соответствующий сигналу, отраженному от движущейся цели, подается на приемник. Согласно изобретению сигнал, отраженный от неподвижной цели, подается на приемник через коммутатор, переключаемый с частотой f1/n (где n - целое число), получаемый с помощью делителя из частоты следования импульсов f1 радиолокационной станции. Недостатком известного устройства является то, что имитируемая скорость (допплеровская частота) привязана к частоте следования импульсов радиолокационной станции и, следовательно, не может имитировать движение объекта в широком диапазоне скоростей (от 0 до 60 км/ч).
Наиболее близким к заявляемому устройству по технической сущности является устройство, содержащее четыре подвижных уголковых отражателя, расположенных на металлической крестовине с возможностью вращения в горизонтальной плоскости под действием ветра (Патент США №2697828, 1954 г., МПК G01S 7/40). Вращающиеся уголковые отражатели могут модулировать отраженный сигнал по частоте и, таким образом, имитировать движущуюся радиолокационную цель.
Недостатком этого устройства является то, что оно не может имитировать движущиеся объекты для РЛС, находящейся на борту самолета, из-за горизонтального расположения уголковых отражателей и не может имитировать заданную скорость движения объекта, потому что уголковые отражатели вращаются произвольно под действием ветра.
Технической задачей настоящего изобретения является расширение типов подвижных радиолокационных целей, находящихся на борту летательного аппарата, с заданной скоростью движения в диапазоне скоростей от 0 до 60 км/ч, которым обеспечивается имитация движения.
Поставленная задача решается за счет того, что в известное устройство имитации радиолокационной подвижной цели, содержащей четыре подвижных уголковых отражателя, согласно изобретению дополнительно введены четыре уголковых отражателя, а также введены несущее колесо, экран, рама на колесах, привод с регулятором частоты и пульт управления, при этом все уголковые отражатели жестко прикреплены к несущему колесу равномерно по окружности, к которому жестко прикреплен экран, при этом привод с регулятором частоты вращения механически соединен с осью колеса, а электрически - с пультом управления, а несущее колесо установлено вертикально на раме с колесами с возможностью вращения.
Проведенный анализ уровня техники позволяет установить, что технические решения, характеризующиеся совокупностью признаков, идентичных всем признакам, содержащимся в предложенной заявителем формуле изобретения, отсутствуют, что указывает на соответствие заявленного изобретения критерию охраноспособности «новизна».
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными признаками заявленного устройства, показали, что в общедоступных источниках информации не выявлены решения, имеющие признаки, совпадающие с его отличительными признаками. Из уровня техники также не подтверждена известность влияния отличительных признаков заявленного изобретения на указанный заявителем технический результат, следовательно, заявленное изобретение соответствует условию «изобретательский уровень».
Предлагаемое техническое решение «имитатор подвижной радиолокационной цели» промышленно применимо, так как совокупность характеризующих его признаков обеспечивает возможность осуществления, работоспособности и воспроизводимости, так как для реализации «имитатора подвижной радиолокационной цели» могут быть использованы известные материалы и оборудование.
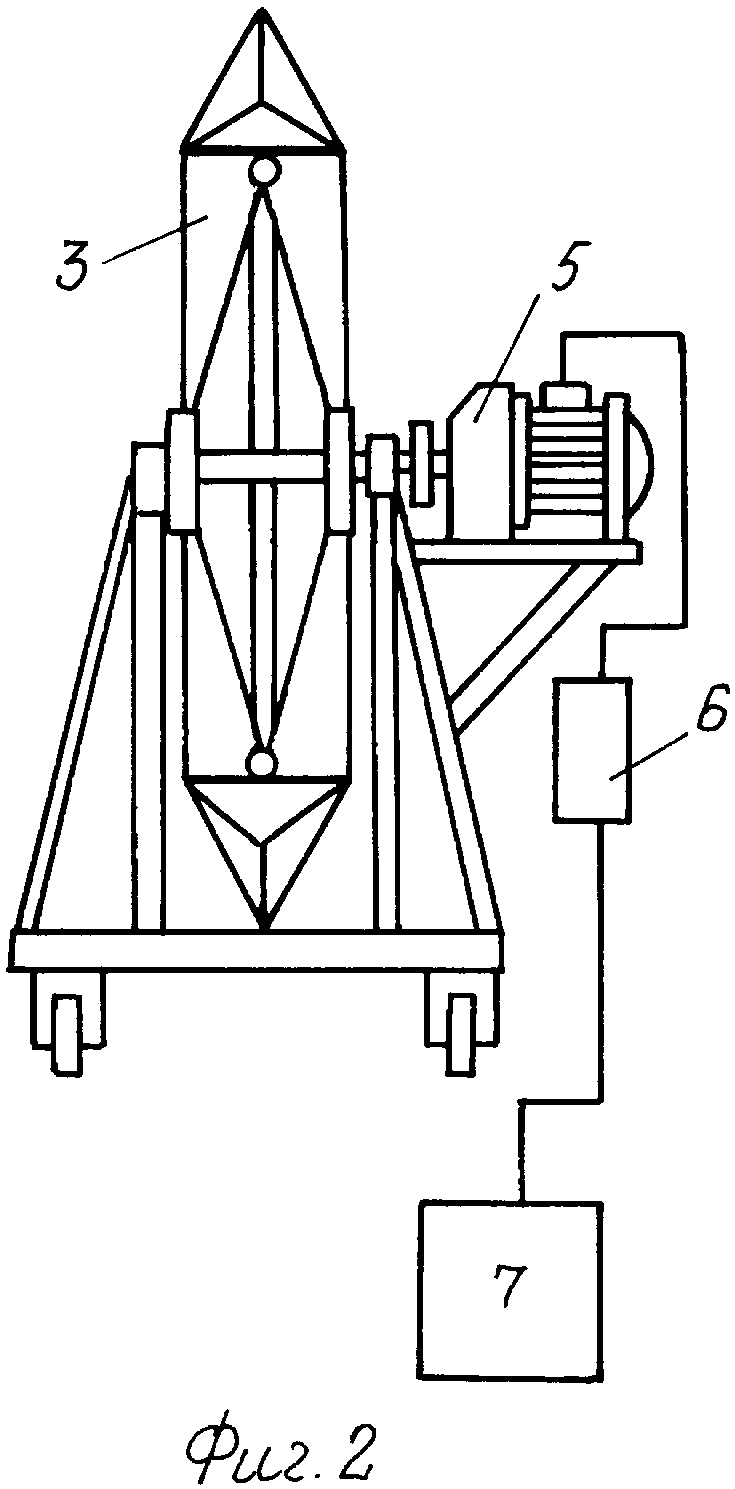
На фиг.1 представлен чертеж главного вида имитатора подвижной радиолокационной цели, на фиг.2 - вид слева имитатора подвижной радиолокационной цели.
Имитатор подвижной радиолокационной цели содержит восемь уголковых отражателей 1.1-1.8, несущее колесо 2, экран 3, раму на колесах 4, привод 5, регулятор частоты вращения 6, пульт управления 7.
Все уголковые отражатели 1.1-1.8 жестко прикреплены к несущему колесу 2 равномерно по окружности, к несущему колесу 2 жестко прикреплен экран 3, привод 5 механически соединен с несущим колесом 2, регулятор частоты вращения 6 электрически соединен с приводом 5 и пультом управления 7.
Имитатор подвижной радиолокационной цели работает следующим образом.
С помощью регулятора частоты вращения 6 устанавливается время разгона и частота вращения несущего колеса 2 с прикрепленными уголковыми отражателями 1.1-1.8 и экраном 3, включается пульт управления 7. Несущее колесо 2 разгоняется до установленной частоты вращения. С помощью рамы на колесах 4 имитатор подвижной радиолокационной цели вручную устанавливается осью верхнего уголкового отражателя 1.1 на РЛС. Управление имитатором осуществляется с помощью пульта управления 7. По окончании работы имитатора подвижной радиолокационной цели производится замедленная остановка, которая обеспечивается регулятором частоты вращения 6 и пультом управления 7.
Уголковые отражатели выбраны с треугольными гранями, потому что у них достаточно широкая (42°) диаграмма обратного отражения.
Восемь уголковых отражателей 1.1-1.8 выбрано с учетом непрерывности наблюдения их радиолокационной станцией, расположенной на летательном аппарате (вертолет, самолет).
Несущее колесо 2 установлено вертикально, что дает возможность наблюдения имитатора подвижной радиолокационной цели в верхней полусфере, что необходимо в большинстве применений.
Диаметр несущего колеса 2 выбирают с возможностью имитации подвижных радиолокационных целей, двигающихся со скоростью 0-60 км/ч.
Рама на колесах 4 служит для размещения несущего колеса 2 в вертикальной плоскости и перемещения имитатора.
Экран 3 в имитаторе установлен между уголковыми отражателями 1.1-1.8 и наружным ободом несущего колеса 2 и применен для исключения влияния спиц несущего колеса на отраженный сигнал.
Привод 5, состоящий из мотора с редуктором, присоединен к оси несущего колеса 2 и обеспечивает его вращение.
Регулятор частоты вращения 6 обеспечивает вращение несущего колеса 2 с заданной частотой, а также плавный разгон и плавное торможение его.
Пульт управления 7 служит для управления имитатором подвижной радиолокационной цели. Устанавливается на расстоянии не менее 10 метров от имитатора.
Практическое исполнение имитатора подвижной радиолокационной цели следующее.
Уголковые отражатели с треугольными гранями. Размер ребра грани - 285 мм. Несущее колесо - 2000 мм. Экран - цилиндрической формы с диаметром 2000 мм и высотой 300 мм. Рама с колесами диаметром 200 мм, длиной 2400 мм, шириной 1400 мм, высотой - 1505 мм. Привод - мотор-редуктор, мощность электродвигателя 2,2 кВт. Регулятор частоты вращения типа SУ 100-022 NFE. Пульт управления - типовой.
Имитатор подвижной радиолокационной цели обеспечивает имитацию скоростей в диапазоне 0-60 км/ч, т.е. практически обеспечивает имитацию движения всех наземных военных целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННО-ТЕПЛОВОЙ ИМИТАТОР ЦЕЛИ | 2021 |
|
RU2765485C1 |
| ИМИТАТОР ДВИЖУЩЕЙСЯ ЦЕЛИ | 1989 |
|
SU1841102A1 |
| Имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО | 2022 |
|
RU2799747C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| Имитатор света фар движущейся по мостовой переправе техники | 2024 |
|
RU2835067C1 |
| Способ селекции реальных воздушных объектов на фоне помех, формируемых имитаторами вторичного излучения, за счет использования мобильного радиолокатора | 2021 |
|
RU2787471C1 |
| Способ формирования мишенного объекта, имитирующего старт воздушной цели в условиях ракетной позиции, аэродрома, необорудованной территории, и устройство для его осуществления | 2019 |
|
RU2759973C2 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2020 |
|
RU2735289C1 |
| УНИВЕРСАЛЬНЫЙ ИМИТАТОР ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2147722C1 |
| ИМИТАТОР ДВИЖУЩЕЙСЯ ЦЕЛИ | 2003 |
|
RU2239773C1 |
Имитатор подвижной радиолокационной цели относится к радиолокации, может быть использован при создании ложных путей перемещения техники и разработке тренажеров для обучения личного состава радиолокационных станций. Заявленный имитатор содержит восемь подвижных уголковых отражателей, несущее колесо, экран, раму на колесах, привод с регулятором частоты вращения и пульт управления, при этом все уголковые отражатели жестко прикреплены к несущему колесу равномерно по его окружности, к которому прикреплен жестко экран, причем привод с регулятором частоты вращения механически соединен с осью колеса, а электрически - с пультом управления, а несущее колесо установлено вертикально на раме с колесами с возможностью вращения. Достигаемым техническим результатом изобретения является обеспечение имитации движения радиолокационных целей, перемещающихся со скоростью 0-60 км/ч, т.е. практически обеспечивает имитацию движения всех наземных военных целей. 2 ил.
Имитатор подвижной радиолокационной цели, содержащий четыре уголковых отражателя, отличающийся тем, что в него дополнительно введены четыре уголковых отражателя, а также несущее колесо, экран, рама на колесах, привод с регулятором частоты вращения и пульт управления, при этом рама на колесах предназначена для размещения несущего колеса в вертикальной плоскости и перемещения имитатора, все уголковые отражатели жестко прикреплены к несущему колесу равномерно по его окружности с обеспечением непрерывности наблюдения их радиолокационной станцией, между уголковыми отражателями и наружным ободом несущего колеса жестко прикреплен экран для исключения влияния спиц несущего колеса на отраженный сигнал, привод с регулятором частоты вращения механически соединен с осью несущего колеса, при этом регулятор частоты вращения обеспечивает вращение несущего колеса с заданной частотой, а также его плавный разгон и торможение, кроме того, привод с регулятором частоты вращения электрически соединен с пультом управления, предназначенным для управления имитатором подвижной радиолокационной цели.
| Способ получения препарата для профилактики и лечения радиационных поражений организма животных и способ профилактики и лечения радиационных поражений организма животных | 2019 |
|
RU2697828C1 |
| RU 2066460 С1, 10.09.1996 | |||
| ИМИТАТОР ДОППЛЕРОВСКОГО СДВИГА ЧАСТОТЫ | 2000 |
|
RU2169379C1 |
| ИМИТАТОР ДВИЖУЩЕЙСЯ ЦЕЛИ | 2003 |
|
RU2239773C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ОТРАЖАТЕЛЬНЫХ СВОЙСТВ ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ В СВЧ ДИАПАЗОНЕ РАДИОВОЛН | 1997 |
|
RU2111506C1 |
| US 2005195884 A1, 08.09.2005 | |||
| US 4531127, 23.07.1985 | |||
| WO 8808987 A1, 17.11.1988. | |||

